
Další týden utekl jako voda a je proto čas, aby připlul další tradiční kosmonautický přehled nejzajímavějších událostí uplynulých sedmi dní. Dnes si Kosmotýdeník bere jako hlavní téma závěrečnou zprávu společnosti ispace o nehodě jejich prvního komerčního lunárního landeru HAKUTO-R. Závěry jsou velmi zajímavé a nadějné. Podíváme se také na let VSS Unity společnosti Virgin galactic, která po dvouleté pauze opět začíná se suborbitálními lety. Nevynecháme ani start rakety Sojuz, či ohlédnutí za letem Super Heavy Starship. Přeji vám dobré čtení a pěknou neděli.
Závěrečná zpráva z nehody lunárního landeru
Zdroj: https://spacenews.com/
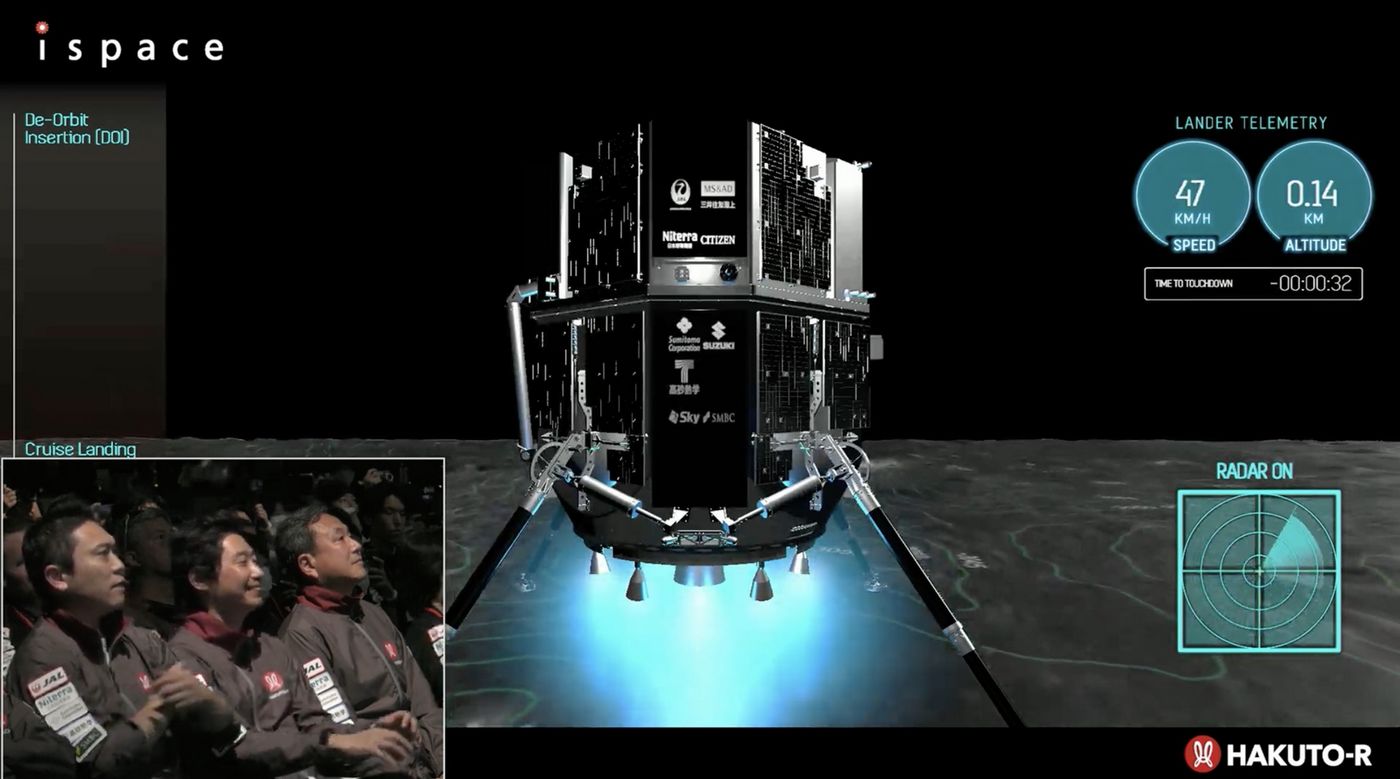
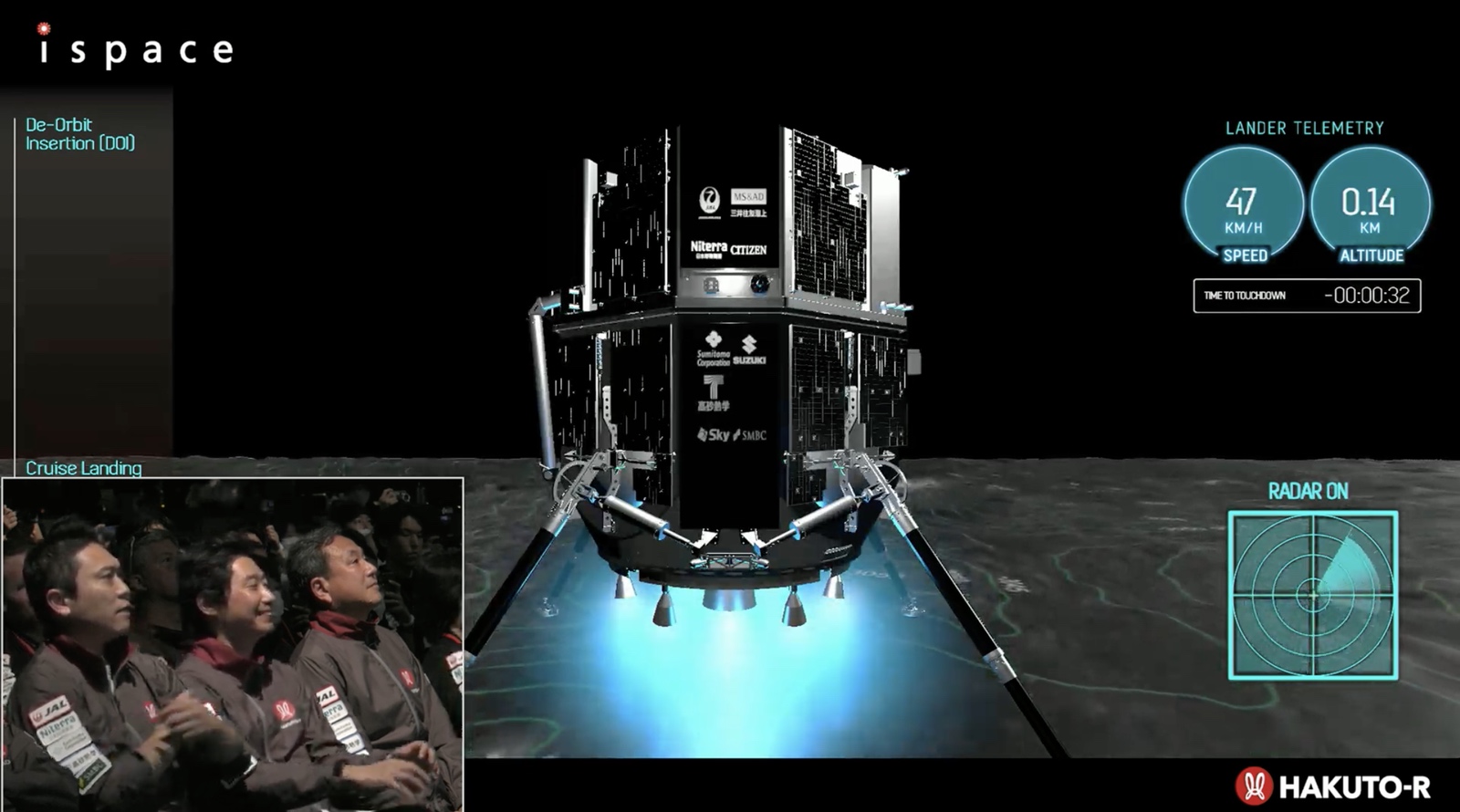
Začátek si přímo říká o konstatování otřepaného: „Chybami se člověk učí“. Platí to vždy a ve všem. Kosmonautika patří k oborům, kde ty chyby skoro vždy končí fatálně a přesvědčil se o tom i tým, který se pokusil přistát na Měsíci. Byla to japonská společnosti ispace, která se 26. dubna pokusila přistát se svými landerem HAKUTO-R na povrchu Měsíce a doručit na povrch několik nákladů pro komerční zákazníky. V případě úspěchu by se jednalo o první úspěšné komerční přistání na Měsíci. Nicméně jsme bohužel v přímém přenosu mohli sledovat postupně vadnoucí úsměvy jednotlivých členů týmu, když se řadu minut po plánovaném času přistání modul stále neozýval. Ještě ten den společnost uznala ztrátu svého modulu a začalo vyšetřování. Měsíc po nehodě – 25. května vydala ispace závěrečnou zprávu, ve které je odhalena pravděpodobná příčina havárie. Pojďme se na to podívat.
Analýza dat ukázala poměrně zajímavou skutečnost, že lander během přistání udělal všechno správně a dle dat úspěšně přistál rychlostí 1 m/s, což je ideální přistávací rychlost. Přistání navíc proběhlo ve správné, tedy vertikální poloze. Problém však byl, že se tato data vztahovala k výšce 5 kilometrů nad povrchem. Důvodem byla softwarová chyba.
Přistávací manévr z výšky asi 100 kilometrů nad povrchem Měsíce začal v 17:40 SELČ a celý manévr probíhal dobře až do času 18:43 SELČ, což byl také předpokládaný čas přistání. Během sestupu však došlo k neočekávanému chování při měření výšky nad povrchem. Zatímco HAKUTO-R odhadoval svou vlastní výšku jako nulovou, resp. se zdálo, že lander je na povrchu Měsíce, tak se ve skutečnosti nacházel ve výšce 5 kilometrů nad povrchem. Po dosažení „přistání“ pokračoval modul v sestupu nízkou rychlostí, dokud pohonnému systému nedošlo palivo. V té chvíli se řízení sestupu přerušilo a modul dále pokračoval volným pádem, dokud nenarazil na skutečný povrch, kde se roztříštil. O možnosti, že modulu došlo palivo, se ostatně debatovalo již krátce po nehodě, kdy se objevily záběry na displeje, které ukazovaly nulové zásoby paliva. Nicméně paliva bylo dostatek, skutečná příčina nehody byla v měření výšky nad povrchem.
Nejpravděpodobnější příčinou nesprávného odhadu výšky přistávacího modulu bylo, že software nepracoval podle očekávání. Na základě přezkoumání letových dat bylo zjištěno, že při navigaci modulu k plánovanému místu přistání se výška naměřená palubními senzory prudce zvýšila, když modul prolétal nad velkým útesem o výšce přibližně 3 km na povrchu Měsíce. Později bylo určeno, že se jednalo o okraj kráteru. Podle analýzy letových dat došlo k většímu než očekávanému rozdílu mezi naměřenou hodnotou výšky a předem stanovenou odhadovanou hodnotou výšky uloženou v palubním počítači (modul dráhu svého příletu na místo přistání „znal“). Palubní software chybně určil, že příčinou této nesrovnalosti je chybná hodnota hlášená senzorem, a poté byly údaje o výšce naměřené senzorem ignorovány. Tato ochranná funkce, která byla navržena tak, aby odmítla měření výšky s velkým rozdílem od odhadovaného průběhu povrchu, byla zařazena jako robustní opatření pro zachování stabilního provozu modulu v případě hardwarového problému včetně nesprávného měření výškového senzoru.
Zdroj: https://ispace-inc.com/
Proč k tomu došlo? Jedním z hlavních faktorů, které přispěly k tomuto konstrukčnímu problému, bylo rozhodnutí upravit místo přistání po kritickém zhodnocení návrhu dokončeném v únoru 2021. V té době se měnilo místo přistání. I přes četné simulace a mnohé virtuální zkoušky přistání se na problémové místo na Měsíci nepřišlo. Ispace jako provozovatel mise si ponechal celkovou odpovědnost za tuto chybu. Bylo zjištěno, že předchozí simulace přistávací sekvence měly nedostatečná data o reálném povrchu na navigační trase, což vedlo k tomu, že software nesprávně vyhodnotil výšku přistávacího modulu při konečném přiblížení.
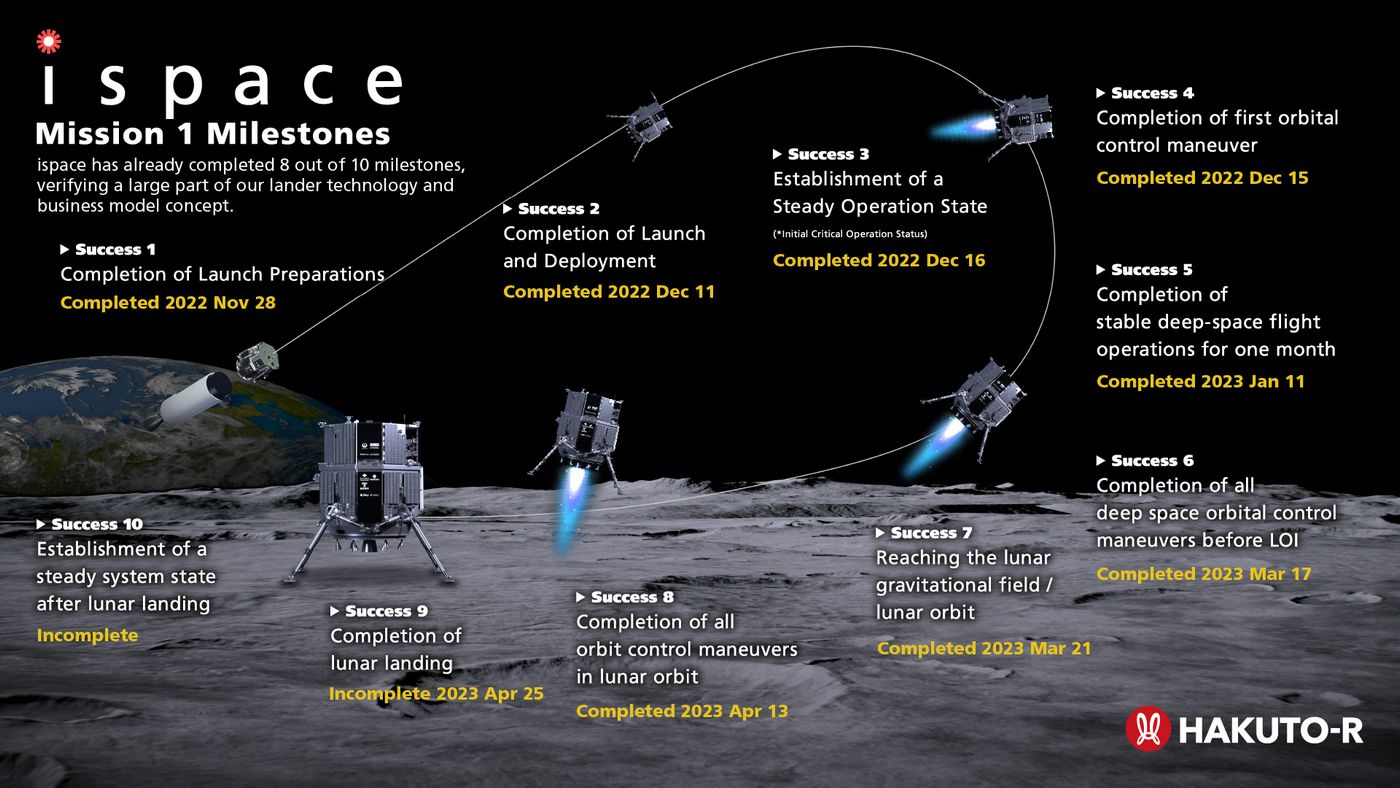
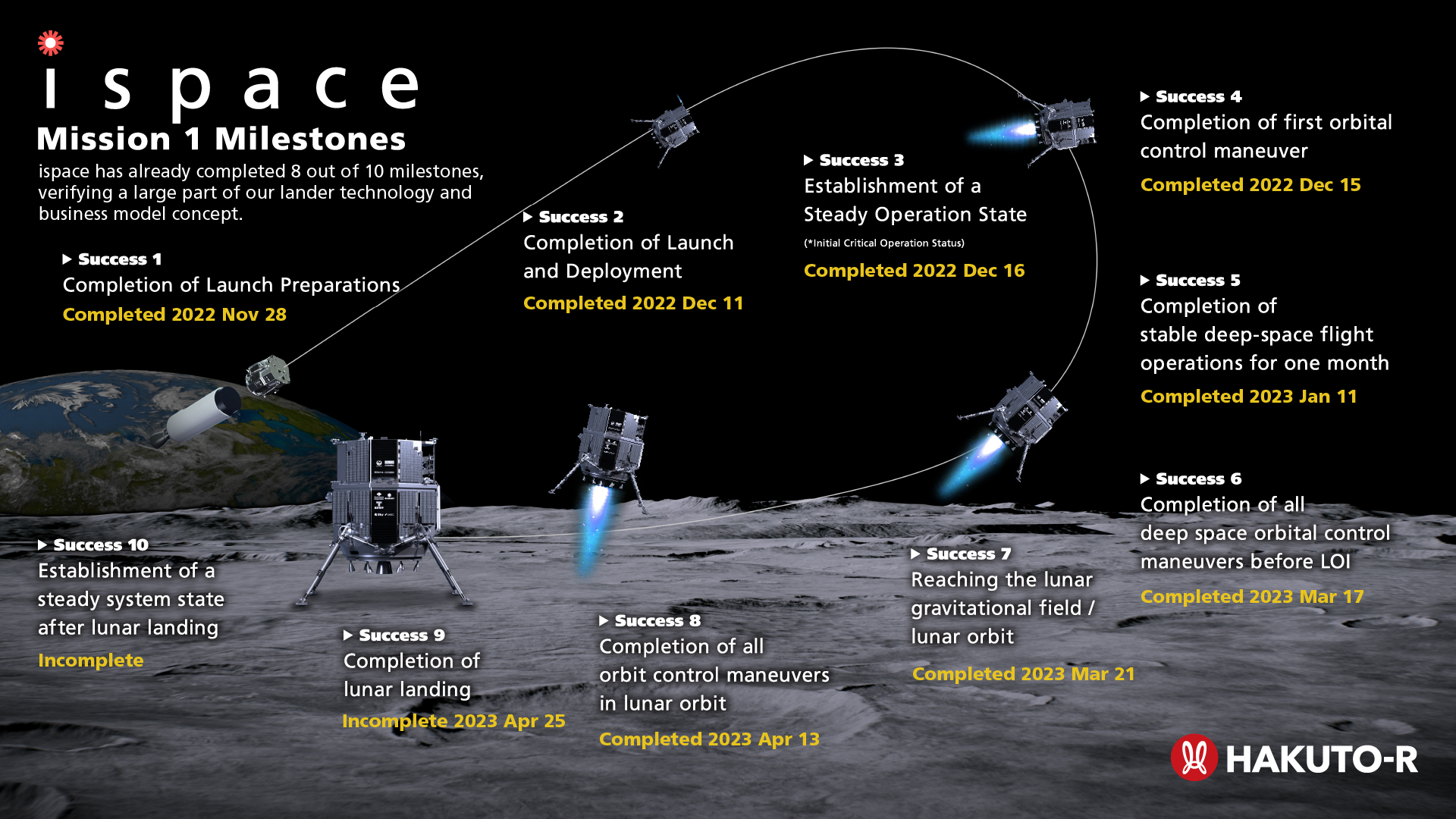
Zjištěné informace budou zapracovány do nového softwaru modulu při dalších misích. Upraveny budou také simulační programy, které se používají k simulovaným přistáním a jejich data se pak nahrávají do navigačního počítače modulu. Tyto změny se dotknou obou dalších plánovaných misí HAKUTO-R 2 a 3. Na základě těchto nových informací, pak bylo konstatováno, že první demonstrační mise splnila 8 z deseti bodů inauguračního letu. Poslední dva nesplněné body zahrnují úspěšné a bezpečné dosednutí na povrchu Měsíce a následné úspěšné vyložení komerčního nákladu a zajištění jeho komunikace a práce. I přes smutný výsledek této první mise je však možné konstatovat, že mise splnila řadu náročných cílů. Od dlouhého přeletu k Měsíci, přes úspěšnou sekvenci přistání krom konečného dosednutí. „Mise 1 prokázala velkou technickou spolehlivost, protože náš modul dosáhl blízkosti povrchu Měsíce těsně před přistáním. Nyní jsme byli schopni identifikovat příčinu konečného selhání a máme zcela jasnou představu o tom, jaké chyby napravit před dalšími misemi. I když je škoda, že jsme nebyli schopni plně naplnit očekávání všech našich zainteresovaných stran, včetně našich zákazníků, všichni ve společnosti ispace jsme hrdí na to, čeho jsme v Misi 1 dosáhli, a jsme velmi pozitivně naladěni na to, čeho můžeme dosáhnout,“ řekl Takeši Hakamada, zakladatel a generální ředitel společnosti ispace. „Již jsme začali pracovat na misi 2 a 3. Jsme připraveni čelit výzvám a vynaložit veškeré úsilí na zlepšení. Zajistíme, aby nás cenné poznatky získané v rámci mise 1 dovedly do další fáze vývoje. Jsme přesvědčeni, že je to náš závazek a naše povinnost vůči všem zúčastněným stranám. ‚Nikdy nevzdat lunární výzvu‘ V tomto duchu budeme pokračovat vpřed.“
Kosmický přehled týdne:
Po takřka dvouleté pauze se opět k obloze vznesl malý komerční suborbitální raketoplán od Virgin Galactic s označením VSS Unity. Dlouhá pauza od předchozího letu, kdy byl na palubě i majitel firmy Richard Branson, byla způsobena tím, že během tohoto posledního letu došlo k vychýlení z plánované letové trajektorie. Po řadě úprav se suborbitální raketoplán opět podíval do výšky nad 80 kilometrů (podle americké definice tedy nad „hranici“ kosmického prostoru, pro zbytek světa pod obecně uznávanou hranici ve výšce 100 kilometrů). Nejvyšší dosažená výška při tomto letu byla 87,2 kilometru. Na palubě byla šestice lidí (Michael Masucci, Frederick W. Sturckow, Beth Moses, Luke Mays, Jamila Gilbert a Christopher Huie), kteří si užili necelých 5 minut stavu mikrogravitace.

Zdroj: https://www.nasaspaceflight.com/
V pátek 26. Května odstartovala z kosmodromu Vostočnyj ruská raketa Sojuz 2.1a, která vynesla civilní radarovou družici Kondor-FKA 1. Více už o družici Michal Václavík z České kosmické kanceláře.
(1/2) Ve 23:14:51,123 SELČ odstartovala ze vzletové rampy 1S na kosmodromu Vostočnyj nosná raketa Sojuz 2.1a s horním stupněm Fregat. Na SSO oběžnou dráhu vynáší civilní radarovou družici Kondor-FKA 1. Od stupně Fregat se družice oddělí 1 hodinu 4 minuty a 51 sekund po startu. pic.twitter.com/rONio3ALcx
— Michal Vaclavik (@Kosmo_Michal) May 26, 2023
SpaceX zveřejnila sestřih z prvního zkušebního letu kompletní sestavy Super Heavy Starship. Rozhodně stojí za zhlédnutí. V rámci něj se dozvíme i to, které exempláře lodi a nosiče poletí příště – Super Heavy B9 a Starship S25.
Přehled z Kosmonautixu:
I tentokrát najdete v této rubrice přehled všech článků a tedy i témat, kterým jsme se v uplynulých sedmi dnech věnovali. Pojďme si je připomenout. Týden jsme načali sledováním startu komerční pilotované mise Axiom-2, která úspěšně zamířila k Mezinárodní kosmické stanici. V pondělí vyšel článek, který se snažil zhodnotit aktuální stav evropské kosmonautiky. Nově připravovaný velký kosmický teleskop Nancy Grace Roman Space Telescope má dokončené své pozorovací srdce. V úterý jste se dočkali dalšího dílu seriálu, který mapuje příběh prvního sovětského pilotovaného programu Vostok. V tomto týdnu se hned několikrát pokusila odstartovat raketa Falcon 9 s telekomunikační družicí Arabsat 7B. Start několikrát znemožnilo počasí, až se nakonec vydařil v sobotu brzy ráno. Sledovali jsme jej Živě a česky. Vyšel také další astrofyzikální článek, který nese název Pulsar Timing Arrays, gravitační vlny a Fermiho observatoř a je to velmi zajímavé čtení. Dalším z Živě a česky komentovaných přenosů byl vzlet nákladní lodi Progress MS-23, kterou vynesla ruská raketa Sojuz. Sledovali jsme jak start, tak i přílet lodi k ISS. Aby toho nebylo málo, další z Živě a česky komentovaných přenosů se zaměřil na start rakety Electron, která vynášela dvojici družic TROPICS. První vědecký přístroj, který má přímo měřit gravitaci na povrchu planetky podstoupil zkoušky v Laboratoři mechanických systémů Evropské kosmické agentury. Jedná se o Gravimetr GRASS. Už to vypadalo, že tento týden uvidíme také zážeh rakety Vulcan, ale k tomu nakonec nedošlo. Kosmické teleskopy Chandra a dalekohled Jamese Webba spojily své síly a přinesly unikátní snímky, na které jsme se podrobně podívali. Poslední pátek v měsíci přinesl tradiční Pokec s Kosmonautixem. V sobotu jsme se díky řadě fotografií podívali na aktuální přípravy na start prvního exempláře rakety Vulcan. Týden jsme uzavřeli nejnovějším dílem Vesmírné techniky.
Snímek týdne:
V pondělí u Mezinárodní kosmické stanice zakotvila pilotovaná loď Crew Dragon, která dovezla čtyři komerční astronauty, kteří na palubě budou osm dní. Počet členů posádky stanice se tak ze sedmi dočasně zvýšil na 11. Snímek ukazuje jak členy dlouhodobé expedice 69, tak i zmíněnou posádku Axiom-2.

Zdroj: https://pbs.twimg.com/
Video týdne:
V JPL proběhl test rozvinutí 8,5 metru dlouhé antény magnetometru pro připravovanou velkou americkou misi Europa Clipper. Tento nástroj je zásadní pro budoucí analýzu a potvrzení či vyvráceni toho, zda se pod ledovým příkrovem měsíce Europa nachází oceán tekuté vody.
This week, the @EuropaClipper team deployed a 28 ft (8.5 m) boom that will support the spacecraft's magnetometer – a key instrument for confirming that an ocean lies beneath the surface of Jupiter's icy moon Europa – and the test went swimmingly! pic.twitter.com/qU9gcv1OpP
— NASA JPL (@NASAJPL) May 26, 2023
Zdroje informací:
https://www.nasaspaceflight.com/ /
https://ispace-inc.com/
Zdroje obrázků:
https://twitter.com/Eurekablog/status/1661849478507249664/photo/4
https://aviationweek.com/…Ispace%20%282%20-%20cropped%20version%29.jpg?itok=7uF2LG8P
https://spacenews.com/wp-content/uploads/2023/04/ispace-landing1.jpg
https://ispace-inc.com/wp-content/uploads/2023/05/f8156473508ff6db1f342793a2564d9d.jpg
https://www.nasaspaceflight.com/wp-content/uploads/2023/05/IMG_5923.png
https://pbs.twimg.com/media/FxATM_nXsAEkAze?format=jpg&name=large




{kind=link}
{kind=link}
{kind=link}
{kind=link}
„Zatímco HAKUTO-R odhadoval svou vlastní výšku jako nulovou, resp. se zdálo, že lander je na povrchu Měsíce, tak se ve skutečnosti nacházel ve výšce 5 kilometrů nad povrchem.“
Tady bych tedy čekal, že lander vypne motory v těch 5 km a bude následovat volný pád. Ale dál se uvádí:
„Po dosažení „přistání“ pokračoval modul v sestupu nízkou rychlostí, dokud pohonnému systému nedošlo palivo. V té chvíli se řízení sestupu přerušilo a modul dále pokračoval volným pádem…“
Proč nevypnul motory už v 5 km, když měl pocit, že je na povrchu?
„Nicméně paliva bylo dostatek, skutečná příčina nehody byla v měření výšky nad povrchem.“
Jak mohlo být paliva dostatek, když došlo ještě vysoko nad povrchem? Ať už modul znal nebo neznal správnou výšku, mělo by být množství paliva nutné k dosednutí v podstatě stejné. Nebo jak to je?
Tipnul bych si, že vypnutí motorů mohlo být vázáno na sepnutí mikrospínačů v nohách. Lander si mohl myslet, že je třeba jen pár cm nad povrchem a tak klesal s nízkým tahem a čekal, že každou chvíli přijde kontakt, aby mohl vypnout motor. Mohla to být pojistka pro případ nepřesného odhadu výšky, aby se lander třeba nezřítil ze dvou metrů.
Paliva by zřejmě bylo dostatek pro normální přistání. Ale lander (možná vlivem špatného odhadu výšky) mohl mít vyšší spotřebu – mohl pracovat s vyšším tahem, aby v domnělé nulové výšce dosáhl nulové rychlosti.
Krom toho, co psal Dušan, to chápu tak, že pro závěrečné zpomalení se spotřebuje zásadní část paliva – normálně by tento závěrečný manévr proběhl až o 5 kilometrů níže a tomu by odpovídala i křivka spotřeby paliva během sestupu.
Jo takhle. Takže ve výšce 5 km motor omylem pořádně zabral a tím spotřeboval větší množství paliva. Lander pak už ten „kousek“ chtěl doklesat na nízký tah a čekal, že užuž přijde kontakt. To ale trvalo dlouho, palivo došlo a hotovo. Díky pánové za vysvětlení.
Omlouvám se za mystifikaci. Dozvěděl jsem se, že moje spekulace nebyla správná.
Stejně tak se omlouvám i já. Také jsem byl upozorněn na nesprávnost mé spekulace. Zatím se mi však nepodařilo zjistit, jak tuto situaci vysvětlit. Věřím, že později budou uvolněny ještě další podrobnosti.
Jako vždy skvělý přehled. A mám otázku zda budete komentovat pilotovaný start čínské kosmické lodi Shenzhou-16.
Zatím ještě nevím. U Číny jsem hodně opatrný, protože nevím, zda bude k dispozici originální přenos.
A díky, že nás čtete. 🙂
Základem by mělo být testování software v simulaci. Njn sonda si vypla radiovýškomer kvůli tomu že změnili trasu letu nad jiný kráter s větším rozdílem výšek než software počítal a pak už bylo vše ztraceno. 3 sondy 3x software chyba, je ten měsíc nějaký zakletý. Snad se už všichni poučili a prostě už to půjde bez dalších boom.
Ví se, jak je na tom hardware pro 2.misi? A je nějaký odhad, kdy by se mohla uskutečnit?
Mám na mysli Hakuto-R
Hovoří se o startu v roce 2024.
„Zatímco HAKUTO-R odhadoval svou vlastní výšku jako nulovou, resp. se zdálo, že lander je na povrchu Měsíce, tak se ve skutečnosti nacházel ve výšce 5 kilometrů nad povrchem.“
Tady bych tedy čekal, že lander vypne motory v těch 5 km a bude následovat volný pád. Ale dál se uvádí:
„Po dosažení „přistání“ pokračoval modul v sestupu nízkou rychlostí, dokud pohonnému systému nedošlo palivo. V té chvíli se řízení sestupu přerušilo a modul dále pokračoval volným pádem…“
Proč nevypnul motory už v 5 km, když měl pocit, že je na povrchu?
„Nicméně paliva bylo dostatek, skutečná příčina nehody byla v měření výšky nad povrchem.“
Jak mohlo být paliva dostatek, když došlo ještě vysoko nad povrchem? Ať už modul znal nebo neznal správnou výšku, mělo by být množství paliva nutné k dosednutí v podstatě stejné. Nebo jak to je?
Tipnul bych si, že vypnutí motorů mohlo být vázáno na sepnutí mikrospínačů v nohách. Lander si mohl myslet, že je třeba jen pár cm nad povrchem a tak klesal s nízkým tahem a čekal, že každou chvíli přijde kontakt, aby mohl vypnout motor. Mohla to být pojistka pro případ nepřesného odhadu výšky, aby se lander třeba nezřítil ze dvou metrů.
Paliva by zřejmě bylo dostatek pro normální přistání. Ale lander (možná vlivem špatného odhadu výšky) mohl mít vyšší spotřebu – mohl pracovat s vyšším tahem, aby v domnělé nulové výšce dosáhl nulové rychlosti.
Krom toho, co psal Dušan, to chápu tak, že pro závěrečné zpomalení se spotřebuje zásadní část paliva – normálně by tento závěrečný manévr proběhl až o 5 kilometrů níže a tomu by odpovídala i křivka spotřeby paliva během sestupu.
Jo takhle. Takže ve výšce 5 km motor omylem pořádně zabral a tím spotřeboval větší množství paliva. Lander pak už ten „kousek“ chtěl doklesat na nízký tah a čekal, že užuž přijde kontakt. To ale trvalo dlouho, palivo došlo a hotovo. Díky pánové za vysvětlení.
Omlouvám se za mystifikaci. Dozvěděl jsem se, že moje spekulace nebyla správná.
Stejně tak se omlouvám i já. Také jsem byl upozorněn na nesprávnost mé spekulace. Zatím se mi však nepodařilo zjistit, jak tuto situaci vysvětlit. Věřím, že později budou uvolněny ještě další podrobnosti.
Jako vždy skvělý přehled. A mám otázku zda budete komentovat pilotovaný start čínské kosmické lodi Shenzhou-16.
Zatím ještě nevím. U Číny jsem hodně opatrný, protože nevím, zda bude k dispozici originální přenos.
A díky, že nás čtete. 🙂
Základem by mělo být testování software v simulaci. Njn sonda si vypla radiovýškomer kvůli tomu že změnili trasu letu nad jiný kráter s větším rozdílem výšek než software počítal a pak už bylo vše ztraceno. 3 sondy 3x software chyba, je ten měsíc nějaký zakletý. Snad se už všichni poučili a prostě už to půjde bez dalších boom.
Ví se, jak je na tom hardware pro 2.misi? A je nějaký odhad, kdy by se mohla uskutečnit?
Mám na mysli Hakuto-R
Hovoří se o startu v roce 2024.