Americké marsovské vozítko Perseverance dokončilo první jízdu po jiném kosmickém tělese, která byla naplánována umělou inteligencí. Experiment proběhl mezi 8. a 10. prosincem a vedla jej Jet Propulsion Laboratory z jižní Kalifornie. Cílem bylo demonstrovat použití generativní AI k vytváření průjezdních bodů (anglicky waypoints) pro Perseverance. Jedná se o komplexní rozhodovací proces, který je typicky prováděn manuálně lidskými plánovači cest roveru. „Tato demonstrace ukazuje, jak daleko pokročily naše schopnosti a rozšířily způsoby, jak prozkoumávat cizí světy,“ poznamenal administrátor NASA, Jared Isaacman a dodal: „Autonomní technologie jako v tomto případě mohou pomoci misím fungovat efektivněji, reagovat na náročný terén a zvyšovat vědecký přínos i když se vzdálenost od země bude zvětšovat. Je to jasný příklad týmů aplikujících opatrně a zodpovědně nové technologie do reálného provozu.“
Zdroj: https://www.nasa.gov/
Během demonstrace tým využil typ generativní AI označovaný jako modely vidění a jazyka (vision-language models), aby analyzovaly existující data z datových souborů JPL z povrchu Marsu. AI tak využívala stejné fotografie a data, na které spoléhají lidští plánovači při vytvoření průjezdních bodů, tedy pevně daných míst, kde rover přijímá novou sadu pokynů, aby mohl bezpečně projíždět náročným terénem na Marsu.
Celý inovativní projekt vedlo středisko provozu roveru ROC (Rover Operations Center) z JPL ve spolupráci s firmou Anthropic, která využila své modely Claude AI. Mars je průměrně vzdálený od Země 225 milionů kilometrů. Tyto velké rozestupy vytváření výrazné komunikační zpoždění, takže přímé ovládání roveru pomocí „joysticku“ je nereálné. Namísto toho po dobu 28 let u několika misí funguje následující postup. Cesty roverů jsou plánovány a vykonávány lidskými „řidiči“, kteří analyzují terén a data o stavu vozítka, aby načrtli s použitím průjezdních bodů trasu. Průjezdní body jsou přitom většinou vzdálené maximálně 100 metrů, aby se vyloučila případná rizika. Poté se tyto plány posílají k roveru pomocí antén komunikační sítě Deep Space Network a rover je pak vykoná.
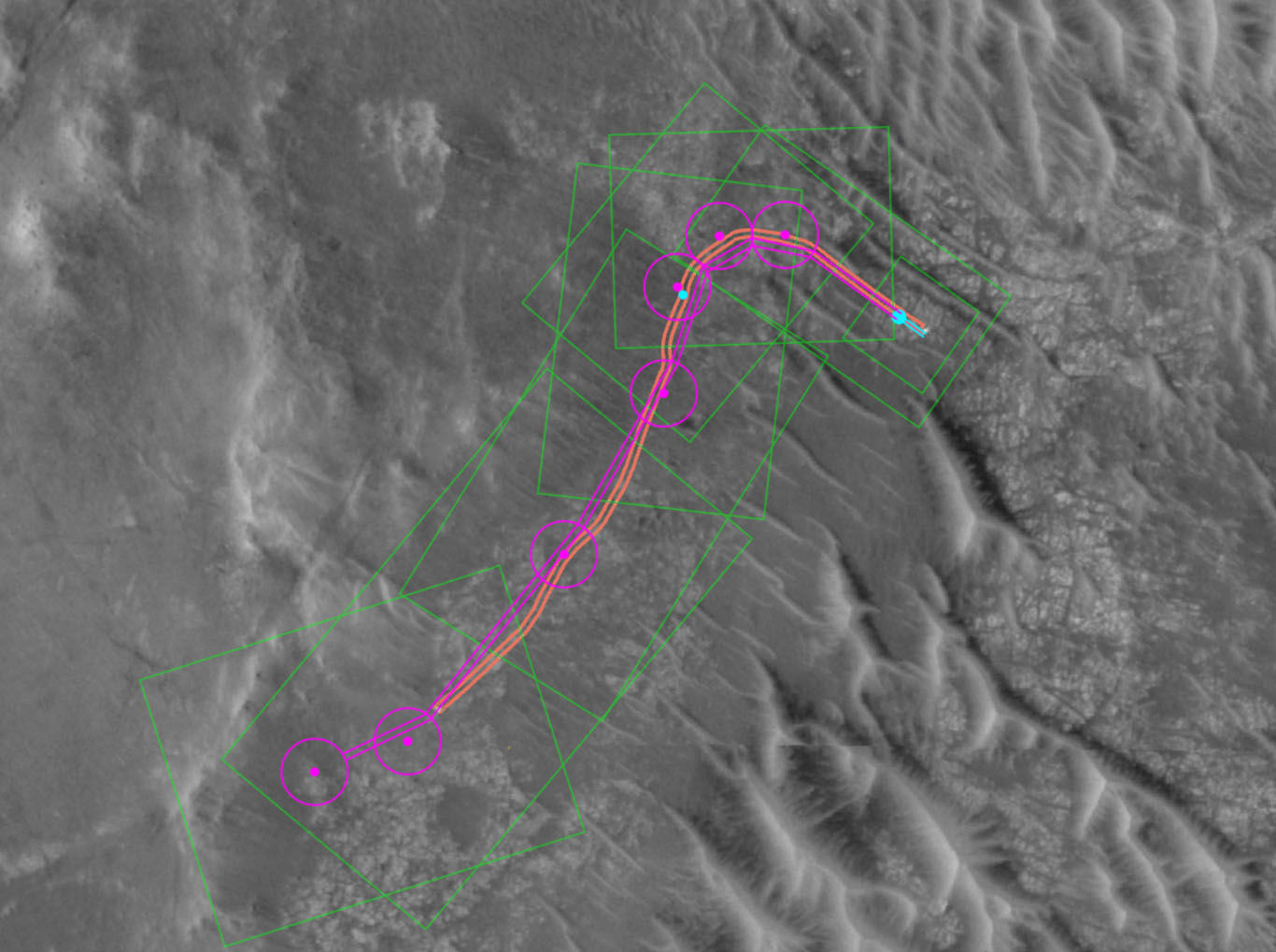
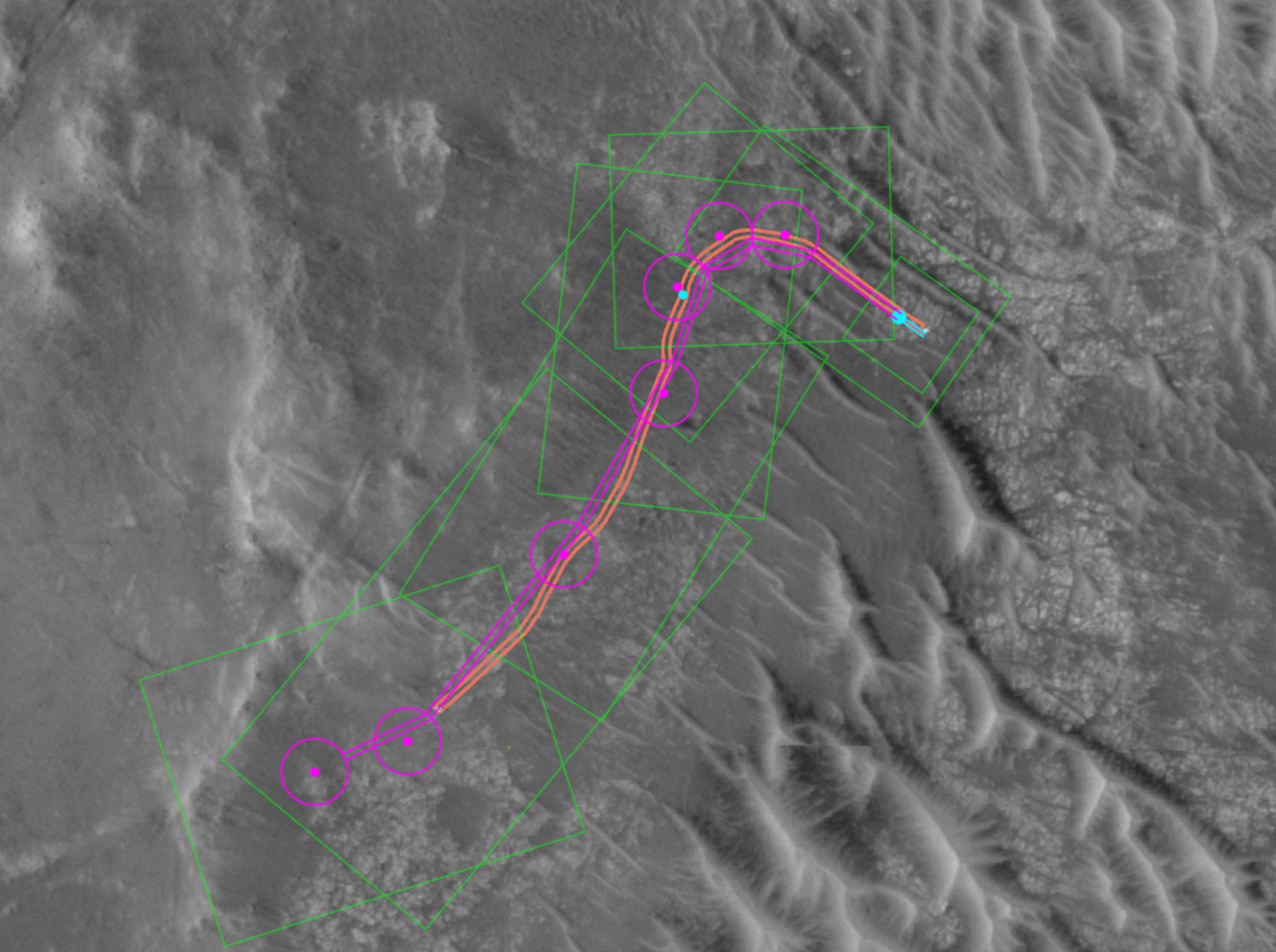
Ovšem pro jízdy roveru Perseverance během solů (marsovských dnů) s pořadovými čísly 1707 a 1709 od začátku jeho mise udělal pozemní tým něco jinak. Generativní AI poskytla analýzu orbitálních snímků ve vysokém rozlišení, které poskytla kamera HiRISE (High Resolution Imaging Science Experiment) z americké sondy MRO (Mars Reconnaissance Orbiter) a data o sklonech terénu z digitálních modelů elevace terénu. Po identifikaci důležitých terénních prvků (skalního podloží, výchozů, nebezpečných balvanitých polí, písečných vln a podobně) vygenerovala souvislou trasu doplněnou o průjezdní body.
Aby se ověřilo, že instrukce od AI jsou plně kompatibilní se softwarem roveru, inženýrský tým také tyto pokyny zpracoval prostřednictvím digitálního dvojčete (virtuální repliky) roveru. Bylo tak možné prověřit více než 500 000 telemetrických proměnných ještě před posláním pokynu na Mars. 8. prosince s AI vytvořenými průjezdnými body ve své paměti ujel rover Perseverance 210 metrů. O dva dny později přidal dalších 246 metrů! „Základní prvky generativní AI jsou velmi slibné, pokud jde o zefektivnění pilířů autonomní navigace pro jízdu mimo naši planetu: vnímání (vidění kamenů a vln), lokalizaci (znalost toho, kde se nacházíme) a plánování a řízení (rozhodování a volba nejbezpečnější trasy),“ uvedla Vandi Verma, kosmická robotička z JPL a členka inženýrského týmu kolem mise roveru Perseverance a dodala: „Posouváme se blíže ke dni, kdy generativní AI a další chytré nástroje pomohou našim roverům na povrchu zvládat jízdy s délkou v řádu kilometrů při minimalizaci pracovní zátěže operátorů. Budou přitom pro náš vědecký tým označovat zajímavé povrchové prvky tím, že prohledají obrovské množství snímků pořízených vozítky.“
„Představte si inteligentní systémy nejen na zemském povrchu, ale také v pokročilých aplikacích v našich roverech, vrtulnících, dronech a dalších prvcích na mimozemských tělesech, které jsou trénovány kolektivní moudrostí našich inženýrů, vědců a astronautů z NASA,“ uvedl Matt Wallace, manažer Oddělení pro průzkumné systémy (Exploration Systems Office) na JPL a dodal: „Tohle je technologie, která mění pravidla hry, kterou potřebujeme k vybudování infrastruktury a systémů nezbytných pro trvalou přítomnost člověka na Měsíci a k tomu, abychom dostali USA na Mars a ještě dál.“
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://mars.nasa.gov/layout/mars2020/images/PIA23764-RoverNamePlateonMars-web.jpg
https://www.nasa.gov/wp-content/uploads/2026/01/e2-pia26645-hyperdrive-overlay.png





{kind=link}
{kind=link}