
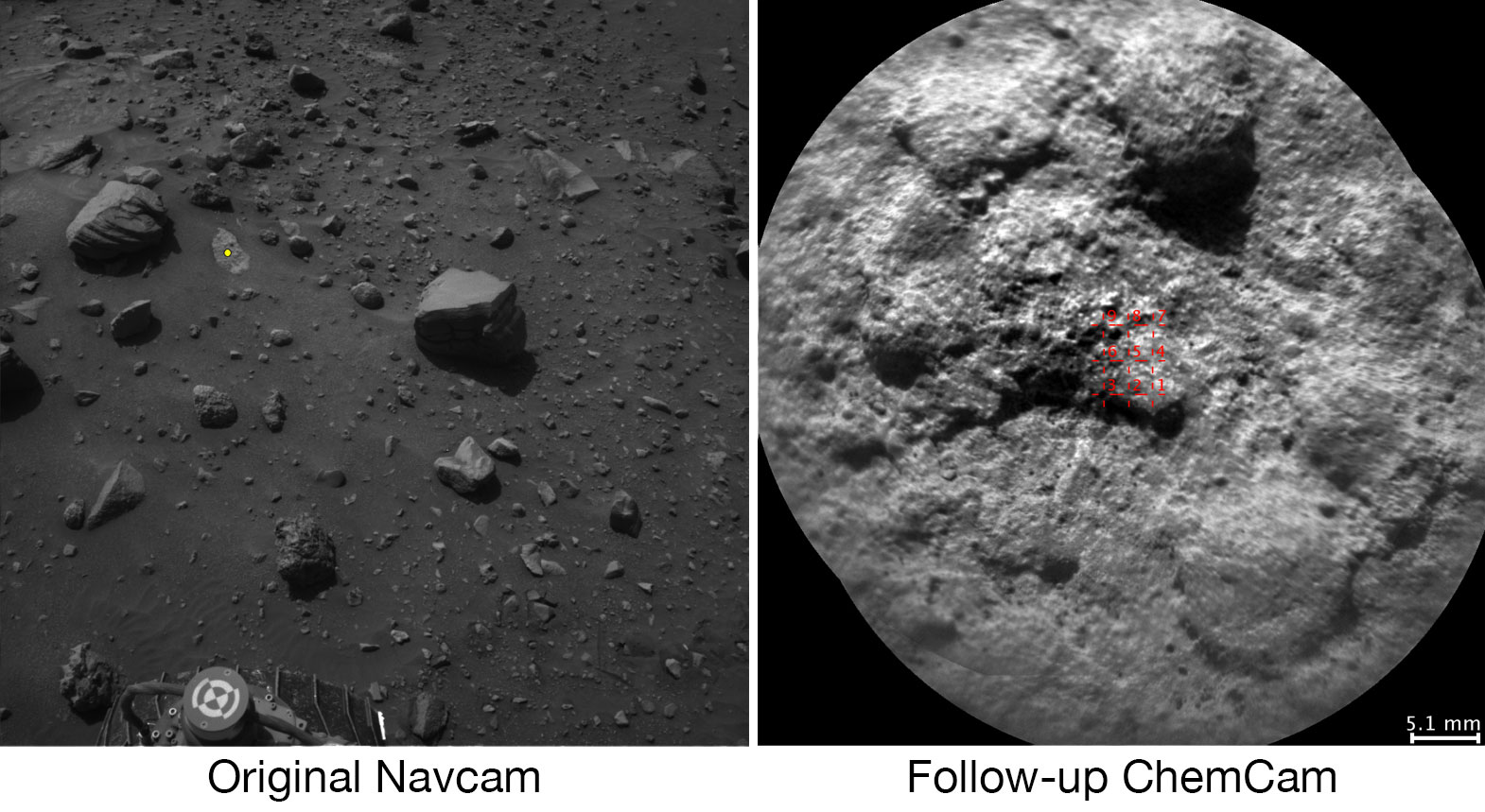
Vozítko Curiosity, které brázdí již téměř 4 roky povrch Marsu, se dočkalo softwarového vylepšení, které mu umožňuje provádět autonomní průzkum cílů pomocí laserového spektrometru ChemCam. Pozemní operátoři sice stále většinu cílů stále vybírají sami, ale vozítko samotné si za týden zvolí několik objektů, u kterých dálkově prozkoumá jejich složení. Nový autonomní režim nemá za úkol nahradit člověka, jeho úkolem je přinést nové možnosti, které vhodně doplní už tak dost široké možnosti tohoto roveru.
Za vším stojí program jménem AEGIS (Autonomous Exploration for Gathering Increased Science), který se původně použil u roveru Opportunity – zde ale nedostal tolik prostoru a navíc obsluhoval jiný přístroj. Program na Opportunity využívá snímků z širokoúhlých kamer a na základě jejich analýzy autonomně rozhoduje, které kameny budou vyfoceny detailnější kamerou s užším zorným polem. V roce 2011 získal program AEGIS ocenění „Software of the Year“.
Díky tomuto programu může rover provádět výzkum i v době, kdy by zadávání příkazů ze Země bylo složité – třeba v průběhu delšího přejezdu. Vědci přitom mají možnost ovlivňovat zadání, podle kterých se program rozhoduje, který kámen prozkoumá. Je tak možné filtrovat cíle podle velikosti, nebo odrazivosti. Software pak prohlíží snímky z navigačních kamer NavCam a hledá na nich cíle, které odpovídají zadáním. Pokud je najde, aktivuje přístroj ChemCam, který na kámen vyšle sérii laserových pulsů.
Zdroj: http://www.nasa.gov/
Curiosity zatím pomocí ChemCam prozkoumala již 10 000 bodů na 1400 objektech, do kterých vyslala více než 350 000 laserových pulsů. Místo zásahu sleduje kamera se spektrometrem, který na základě barevných spekter vypařených materiálů určuje jejich chemické složení. Jelikož je umístěn na „hlavě“ vozítka, může svým laserem prozkoumat i objekty, které leží 7 metrů od roveru, jeho další výhodou je, že se opakovaným použitím nepoškozuje.
Zdroje informací:
http://www.nasa.gov/
Zdroje obrázků:
http://www.msl-chemcam.com/images/header/header_07.jpg
http://www.nasa.gov/…/image/pia20762_aegis-chemcam-sol-1400.jpg



{kind=link}
{kind=link}
Jsou někde kdys pozici informace o tom jaké velikosti dosahuje ta část aktualizovaného softwaru? A jaká byla přenosová rychlost během updatu?
Datovou velikost se asi dozvíme jen stěží, ale přenos asi nemusel trvat moc dlouho. Sonda MRO na oběžné dráze je velmi výkonnou retranslační družicí.
Palubni pocitac ma 2GB flash a 256kB EEPROM takze vetsi to urcite nebude. I procesor je relativne pomaly – RAD 750 ktery ma max 250Mhz a na Curiosity jede pomaleji. Je to sice pomale, drahe, zalozene na PowerPC ale zvlada to neskutecnou uroven radiace.
Mimochodem – jedna z veci jak SpX usetrila je to ze nepouziva tydle ale normalni procesory. Da do lodi/rakety tri a necha je hlasovat. V pripade ze je vysledek ruzny tak ty co se schodnou vyhravaj. Ale pro cestu na Mars to asi budou muset predelat.
Pouziva se operacni system VxWorks coz je RTOS tj. realtime operating system. Ten je predevsim urcen proto aby se ulohy provadeli za jasne danych podminek a ne ze se v pulce prace neco prerusi protoze se neco stane (proto tam neni napr. Linux). Mimochodem – na podobnych (ale free) RTOS jsou postavena ovladani dronu ale i roveru.
Podivejte se treba sem – https://www.youtube.com/watch?v=pfJHgSNx_vY , je to recap ze souteze. Vsechny ty RC auticka, letadla, coptery atd…. se pohybovali plne automaticky, nejedna se o dalkove rizeni. Vozitka dostanou informace o trase a waypointech a vali 🙂
Moc díky za tyhle odborné připomínky!
„Ten je predevsim urcen proto aby se ulohy provadeli za jasne danych podminek a ne ze se v pulce prace neco prerusi protoze se neco stane“
Snad nám nechcete tvrdit, že RTOSy nepoužívají přerušení? Přerušení se používá prakticky všude právě proto, že polling je příliš nákladný.
VxWorks se dle wikipedie pouziva v nasem kontextu opravdu siroce
Spacecraft
———-
The Mars Reconnaissance Orbiter[34]
The Mars Science Laboratory, also known as the Curiosity rover[35]
NASA Mars rovers (Sojourner, Spirit, Opportunity)[34]
The Deep Space Program Science Experiment (DSPSE) also known as Clementine (spacecraft)[36]
Phoenix Mars lander[37]
The Deep Impact space probe[38]
The Mars Pathfinder mission[39]
The SpaceX Dragon[40]
NASA’s Juno space probe sent to Jupiter [41]
Space telescopes
—————-
Fermi Gamma-ray Space Telescope(FGST)[49]
James Webb Space Telescope (in development)[50]
Others
——
European Geostationary Navigation Overlay System (EGNOS)[51]
Tohle by vydalo na velky clanek
Odkaz
https://en.m.wikipedia.org/wiki/VxWorks
Ok,spatna formulace pri snaze o zjednoduseni 😉
Preruseni se samozřejmě používají, myslel jsem to jako priklad pro lidi kteří neprogramuji jednocipy nebo třeba drivery ale pouzivaji bezne operační systémy a setkavaji se s tim ze se najednou něco začne dit a praci to zpomali.
Asi jsem mel pouzit termin „vyrusit“ který by nekolidoval 😀
„nepoužívají přerušení?“ Diskuse napr zde
The stack an interrupt handler use on VxWorks
http://stackoverflow.com/questions/13261614/the-stack-an-interrupt-handler-use-on-vxworks-powerpc
Koukam ze jsme s Amperem psali o tomtez ve stejnou chvili
Nezalozime diskusni vlakno o tomto?
Casem by se to dalo shrnout do clanku..
Vlákno určitě založit můžete, dal bych to asi do volné diskuze, protože se to netýká konkrétních projektů ani agentur.
Omlouvam se za off-topic
SpaceX je Linuxem „prolezla“ jak se dalo cekat, a kupodivu o to i mluvi
Jen letmo dva zajimave clanky primo od lidi z firmy
ELC: SpaceX lessons learned
http://lwn.net/Articles/540368/
LinuxCon: Dragons and penguins in space
http://lwn.net/Articles/516086/
Btw : Tady je seznam kodu které Nasa publikuje jako opensource https://code.nasa.gov/#/ a je tam toho fakt hodne
Real Time OS se od klasických OS liší hlavně Schedulerem. Při přidělování časových kvant běžícím procesům se zohledňuje (nebo je přímo garantováno), že operace proběhne v požadovaném čase, a to včetně případných přerušení, která se mohou v průběhu vyskytnout. Aplikací je spousta: Třeba takový ThreadX RTOS se používá v Zero klientech s Teradici čipem (tenký klient od Wyse resp. Dellu a dalších) pro rychlou a definovanou odezvu při vykreslování 3D grafiky. Kamarád dělal diplomku na Řízení letového provozu, a zde se používá realtime OS pro sledování a navádění letadel.
To: jregent
„ELC: SpaceX lessons learned
http://lwn.net/Articles/540368/
LinuxCon: Dragons and penguins in space
http://lwn.net/Articles/516086/“
Díky moc za odkazy, zajímavé.
„In his team, they have a full-size Justin Bieber cutout that gets placed facing the team member who broke the build. They found that „100% of software engineers don’t like Justin Bieber“, and will work quickly to fix the build problem.“
A zábavné :-))
MSL/MRO komunikuje aktuálně se zemí rychlostí 4 Mbps.
To by byla zajímavá série článků jaký software a hardware používají sondy, družice anebo rakety:-)
suhlasim, taky clanok by bol super
Taky bych si rád přečetl takový článek 🙂 . K softwarové části u raket jsem si vzpomněl i na jednu zajímavost a to sice, že u rakety Arien 5 jedna malá softwarová chyba – výsledky od senzorů přicházely v jiné číselné soustavě, než program očekával, způsobila pár okamžiků po startu výbuch rakety i s nosičem a způsobila škody v několika milionech ne-li miliardách dolarů. To vše jen kvůli malé, jednoduché chybě – jiná číselná soustava…
O tom by byl taktéž zajímavý článek.