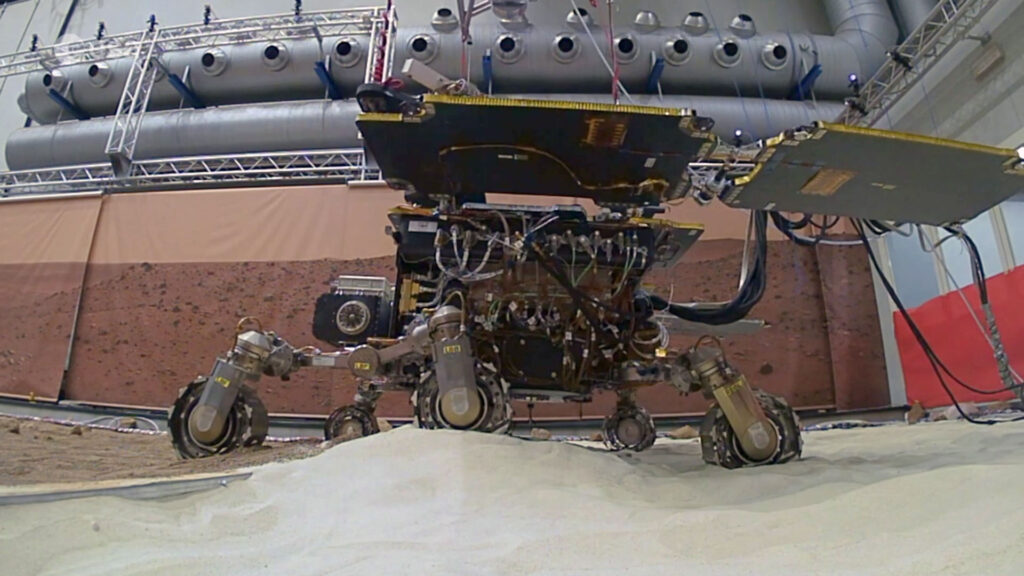
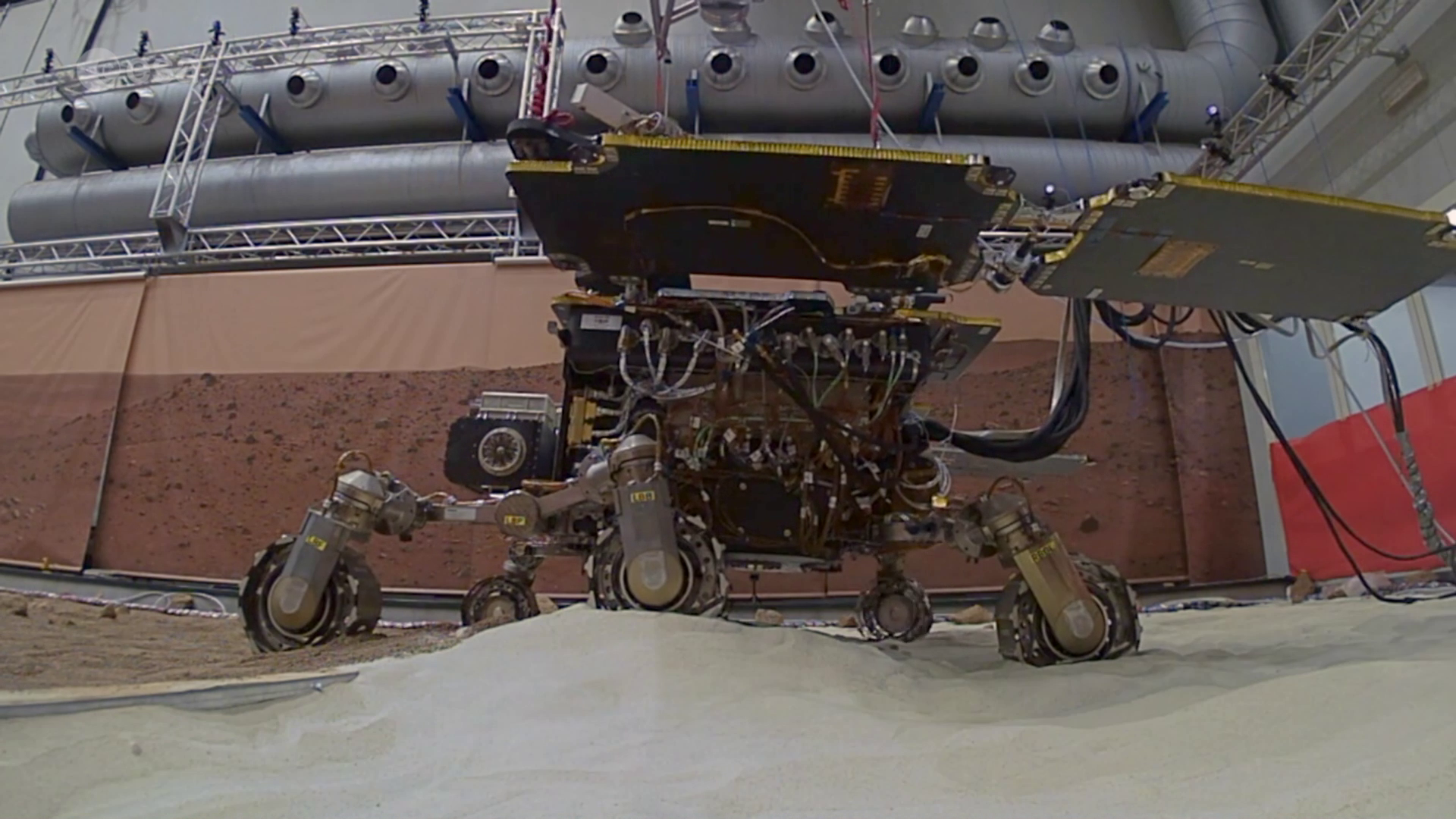
Zkouška provedená v pozemském simulátoru povrchu Marsu spočívala v opuštění oblasti jemného písku a rover si s úkolem poradil tak, že to vypadalo na první pohled jednoduše. Zkouška začala ve chvíli, kdy mělo vozítko dvě přední kola prakticky kompletně zahrabaná do písku. Následně měl rover vyzkoušet svůj jedinečný režim označovaný jako wheel-walking, tedy kráčení s koly. Dva metry dlouhá cesta nakonec roveru zabrala jen asi 20 minut. Vozítko se z pasti dostalo především díky pomalé a promyšlené koordinaci pohybů.
Už dříve se stalo, že marsovská vozítka zajela do písku, který se pro ně stal pastí, protože otáčení kol znamenalo, že se stroj zahrabával stále hlouběji – ostatně každý, kdo někdy zapadl s autem do sněhu či bláta, ví, o čem je řeč. Aby se tomu u mise ExoMars zabránilo, dostal rover Rosalind Franklin (a také jeho testovací replika) jedinečný způsob kráčivého pohybu s koly. Při tomto režimu se stroj pohybuje podobně, jako kdyby měl kráčivé končetiny. V přesně koordinované choreografii se pohybují samotné „nohy“ a zároveň dochází k otáčení kol, což zajišťuje posun bez skluzů. Rover má zajištěnou dobrou trakci i na měkkém podkladu, jakým mohou být například písečné duny.
„Věříme,že nikdy nebudeme potřebovat režim wheel walking k tomu, abychom se na Marsu dostali z písečné pasti, ale jsme rádi, že máme takový prostředek, který může zachránit celou misi,“ Luc Joudrier, komentoval zkoušku manažer zodpovědný za pohyb roveru při misi Exomars a dodal: „Z pohledu provozu vozítka je to skvělá pojistka proti nebezpečným terénům.“ Ve zkoušce zachycené na přiloženém videu je vidět, že zadní kola se nechají táhnout, jakmile přední čtyři kola dosáhnou na pevnějším terénu lepší trakce. Důvodem je, že tato testovací sekvence režimu wheel-walking byla optimalizována spíše pro stoupání po strmých svazích s kyprou půdou. V této sekvenci příkazů je každý pohyb nohou následován krátkým otočením kola. To má zajistit usazení kol (drobné zarytí do podkladu) než se pohne zbytek. Je to podobně, jako když stoupáte po zasněženém svahu před každým krokem se ujistíte, že stojíte pevně. Na pevnějších podkladech není takové usazení pomocí otáčení tolik účinné a může vytvářet efekt vlečení. Proto je možné jej z povelové sekvence vyřadit.
Natočený test proběhl v listopadu 2021 v Mars Terrain Simulator, který je součástí Rover Operations Control Centre v areálu firmy Thales Alenia Space v italském Turíně. Právě odsud se budou řídit vědecké činnosti roveru Rosalind Franklin, až v červnu 2023 přistane na Marsu. Do té doby se bude zařízení využívat k tréninku řidičů roveru a simulaci vědeckých činnosti, které se očekávají v rámci hlavní mise.
Přeloženo z:
https://www.esa.int/
Zdroje obrázků:
https://www.esa.int/…/Rover_escapes_from_sand_trap_pillars.png



{kind=link}
Moc pěkná vychytávka. Jen, aby se (jsme se) dostali na povrch v jednom kuse. Škoda, že ESA jde po velkých skocích a ne, jako NASA, od snadnějších misí ke komplikovanějším…
WW je dodatečná schopnost roveru dána jeho prozíravím designem. Už si to přesně nepamatuji, ale schválili jsme to někdy okolo roku 2018/2019 a byl tam velký boj Španělska a Velké Británie.
O co se přeli? Jestli to není tajné. 🙂
Kdo to bude dělat. Jal jsem již psal, rover to technicky uměl.
V jakém stavu jsou přípravy ke startu? Myslíte, že příští rok už poletí?
Po vyřešení otázky druhého termovakuového testu se rezerva dostala opět do černých čísel.
Aha, to se dělalo „pro sichr“ ještě jednou? Nebo se to na minulé okno 2020 nestihlo?
Ne šlo o relativně zbytečný požadavek Roskosmosu. Akorát bylo třeba si to asi rok vyříkat 😀