
Po delší době Vám přinášíme další, tentokrát pátý díl nepravidelného seriálu, který se nazývá Svět startupů. Jak už jeho název napovídá, seriál se zaměřuje právě na malé a inovativní firmy kosmického průmyslu a v každém díle rozebírá jednu z vybraných firem, jejichž aktivita je v nějakém směru zajímavá. Slovem startup se rozumí soukromá firma s nevelkým počtem zaměstnanců, jejíž činnost zpravidla bývá nějakým způsobem v daném směru inovativní a využívá nových, netradičních a často výhodných postupů. Právě tyto firmy ve výsledku přináší okázalé a odvážné nápady, které konkrétní odvětví posouvají dopředu novým způsobem. V důsledku inovací zaběhlých praktik jsou totiž schopny postupovat efektivně a ovlivnit ať už dostupností či právě efektivitou celý trh. V kosmickém průmyslu se těchto firem začíná objevovat čím dál víc, a proto se vyplatí a může být zábavné některé z nich sledovat.

Zdroj: https://astrobotic.com
Pro pátý díl jsem vybral americkou firmu Astrobotic Technology, se sídlem v Pittsburghu, ve státě Pennsylvania. S ohledem na její nedávný první pokus o přistání na povrchu Měsíce jde o aktuální téma a mohlo by být přínosné dozvědět se o Astrobotic nějaké informace navíc. Jak už jsem lehce nastínil, jde o firmu, která se zabývá především aktivitami spojenými s Měsícem, a to konkrétně vývojem subsystémů a vlastních celků za cílem dopravy užitečného nákladu na lunární povrch či oběžnou dráhu Měsíce pro komerčního zákazníka. Vlajkovým produktem startupu je tak v aktuální době lander Griffin a druhý, o něco menší, lander Peregrine. V Astrobotic během doby své aktivity získaly hned několik kontraktů od NASA a právě ty nejaktuálnější se týkají dopravy určitého nákladu za pomocí těchto landerů. Přistávací modul Griffin by tak měl na lunárním povrchu ještě tento rok přistát s roverem VIPER a Peregrine poprvé odstartoval 8. ledna na raketě Vulcan, během jejího vůbec prvního startu, a to s 20 různými náklady a 5 patřícím k programu agentury NASA Commercial Lunar Payload Services (CLPS). Astrobortic se ovšem neangažuje jen ve směru přistávacích modulů, ale jejich pole působnosti sahá i k roverům. Zde jde z mého pohledu o poměrně zajímavý koncept s názvem CubeRover, který staví na populárních CubeSatech a inspiruje se právě myšlenkou těchto malých, na vývoj levných družic, složených ze stavebních bloků přicházejících v různých velikostech. Jde tak o modulární lunární rover, který je možné dodat ve 4 možných velikostech, a to 1U, 2U, 4U a 6U, stejně jako u CubeSatů. Dalším produktem, na který se v tomto článku podíváme, bude rover Polaris, jehož velikost je oproti několikacentimetrovému CubeRoveru o poznání větší. Zajímavým projektem firmy je rovněž vozítko MoonRanger. To by mělo být na Měsíc opět dopraveno v rámci programu CLPS a jeho úkolem bude mapovat jižní pól Měsíce. Z mého pohledu je zajímavé, že soukromé firmy pronikají i do takto specifických okruhů činnosti a portfolio produktů Astrobotic se základní myšlenkou modulárních systémů pro dopravu nákladu na lunární povrch či oběžnou dráhu se mi zdá poměrně originální.
Firma Astrobotic byla založena v roce 2007, a to za účelem zúčastnit se v soutěži Google Lunar X Prize, která spočívala v udělení finanční odměny 20 milionů dolarů prvnímu soukromému týmu, který na povrch Měsíce dopraví rover, jenž urazí 500 metrů a pošle zpět na Zemi vizuální data. Astrobotic ovšem později ze soutěže odstoupila. Zakladatelem firmy je profesor robotiky na Carnegie Mellon University William L. „Red“ Whittaker a generálním ředitelem absolvent totožné univerzity, John Thornton. Pojďme si ovšem nyní něco trochu podrobněji říct ke každému z projektů firmy.
Zdroj: https://esa.int
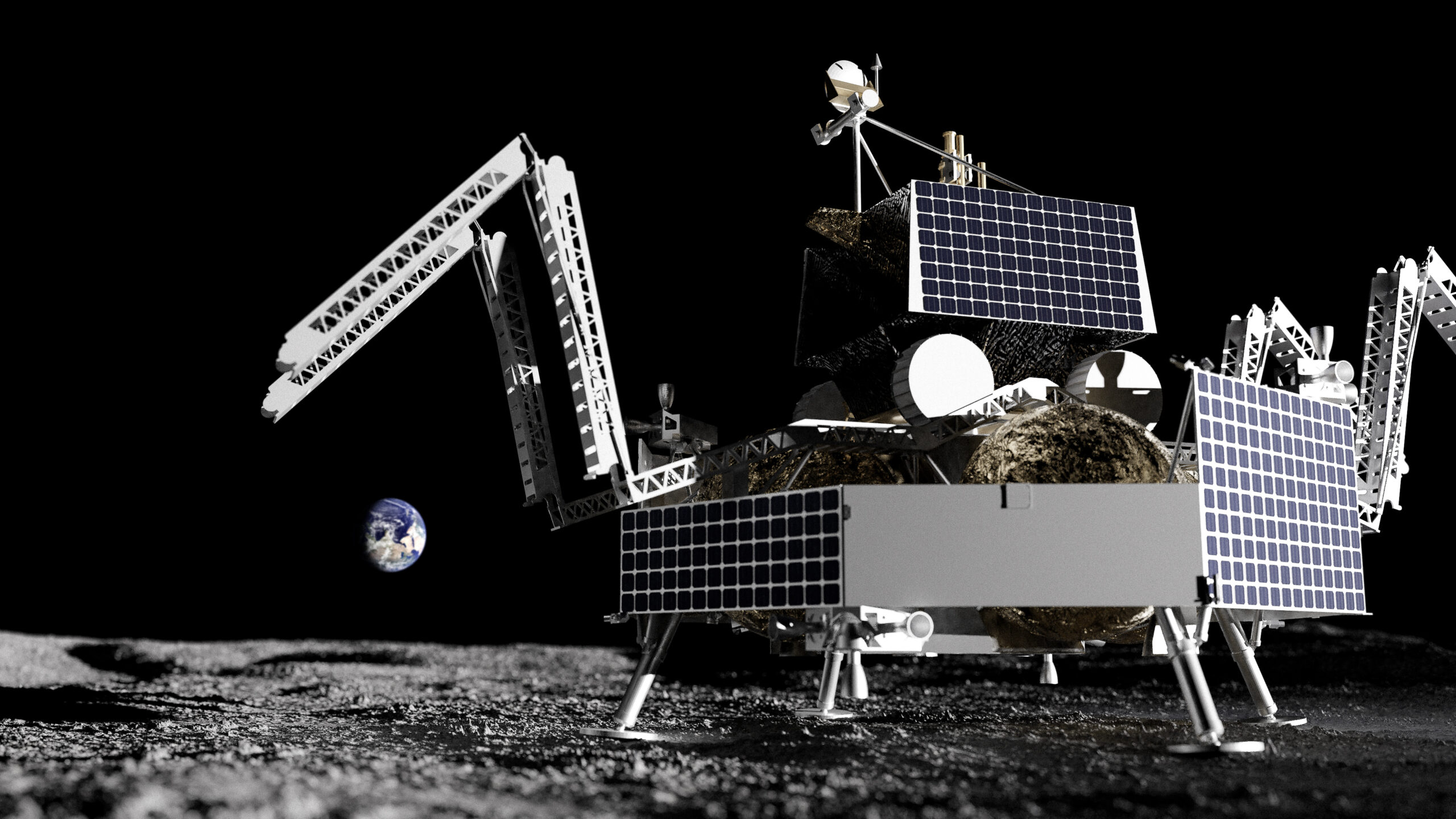
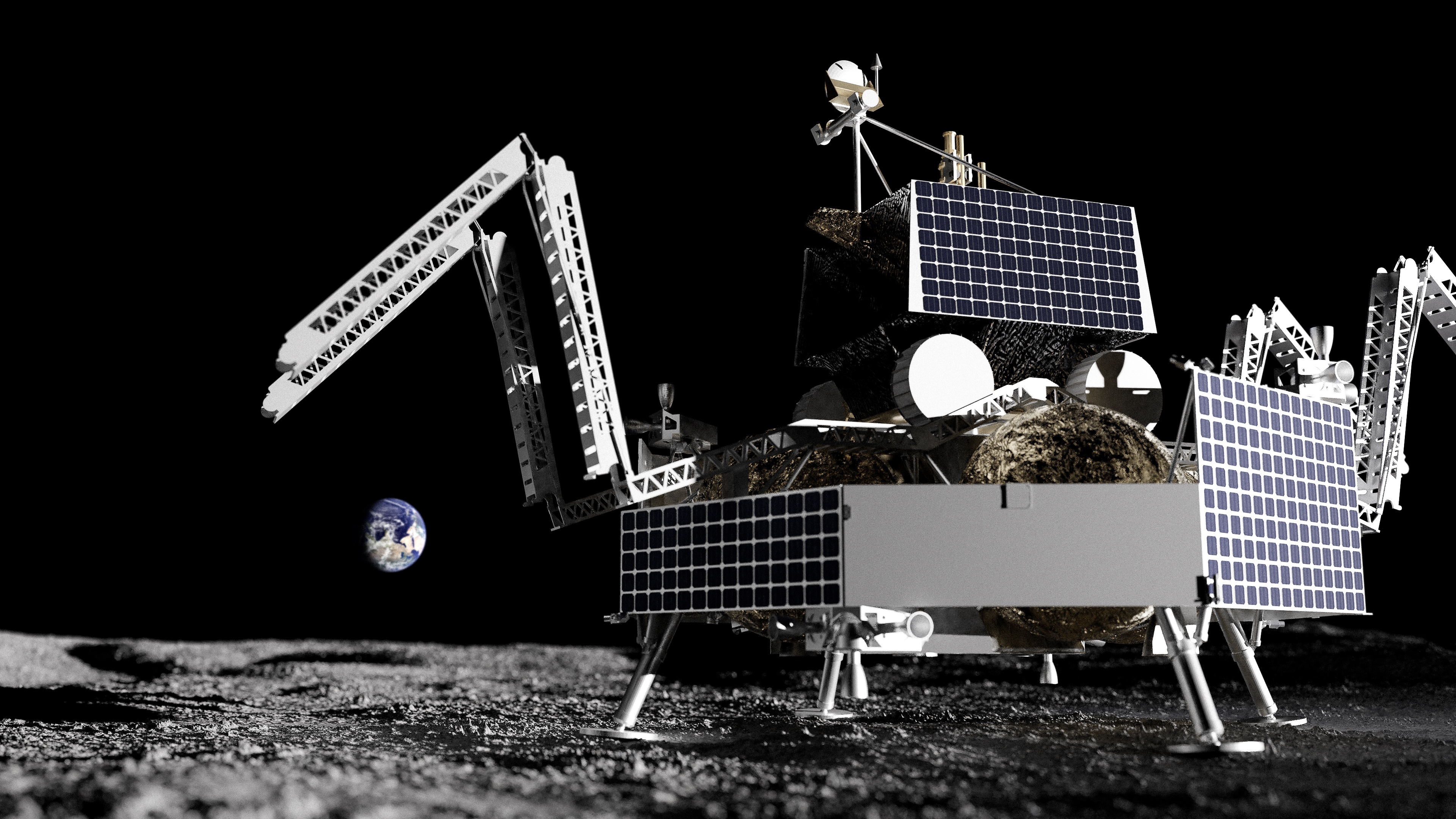
Nejdříve začneme dvojicí přistávacích modulů Griffin a Peregrine. Griffin je lander o šířce 4,5 metru a výšce 2 metry. Díky své nosnosti, která činí přibližně 500 kilogramů, je schopen pojmout a nést celou řadu velkých užitečných nákladů ať už na oběžnou dráhu či samotný povrch Měsíce. Přistávací modul využívá solární články a lithium-iontovou baterii pro ukládání energie. Je vybaven čtyřmi skupinami trysek a sedmi motory, které zajišťují korekce trajektorie a přesun na oběžnou dráhu Měsíce po oddělení od rakety. Následně provádí poháněný sestup a samotné přistání, které tlumí čtveřice nohou. Firma na svých stránkách uvádí, že cena za dopravení jednoho kilogramu nákladu na oběžnou dráhu Měsíce je 300 tisíc amerických dolarů a cena za jeden kilogram na lunární povrch činí 1,2 milionu. Právě tento lander by v rámci kontraktu od agentury NASA za 199,5 milionů dolarů měl koncem tohoto roku zajistit dopravu roveru VIPER do oblasti jižního pólu Měsíce, kde by měl pátrat po vodě. Menší lander Peregrine v nedávné době zažil svůj premiérový start, který ovšem skončil neúspěchem. Jde o 2,5 metrů široký a 1,9 metrů vysoký přistávací modul s nosností 120 kilogramů. Cena za vynesení nákladu je pak shodná s landerem Griffin. Na rozdíl od toho, je ovšem vybaven pouze pěticí motorů, ale rovněž čtyřmi skupinami trysek. Náklad pak může být nad nebo pod palubou a lze jej umístit do krytů či vně podle potřeby. Peregrine je pak taktéž vybaven čtyřmi nohami. Svou premiéru si tento přistávací modul odbyl před osmi dny, když startoval na palubě rakety Vulcan, během jejího prvního startu. Šlo o misi, během které měl Peregrine na povrch Měsíce dopravit 20 užitečných nákladů, jejichž část pochází přímo z programu NASA CLPS. Mezi náklad patřilo několik vědeckých přístrojů s rozličným programem jako je hledání vodního ledu v regolitu či sběr dat o radiaci, ale na palubě se rovněž nachází nevědecké prvky, jako umělecké či historické položky. Firma už ovšem přistání na Měsíci vyloučila. Nejdřív po oddělení landeru nastal problém s orientací solárních článků vůči Slunci a následně Peregrine začal ztrácet pohonné látky. Firma Astrobotic uvedla, že start rakety Vulcan proběhl bezproblémově a přistávací modul byl doručen na správnou dráhu, tudíž samotný start rakety neměl na následné problémy vliv. Peregrine zároveň měl po tomto startu v případě, že by se přistání povedlo, být prvním úspěšným americkým landerem na povrchu Měsíce od roku 1972.
Zdroj: https://astrobotic.com
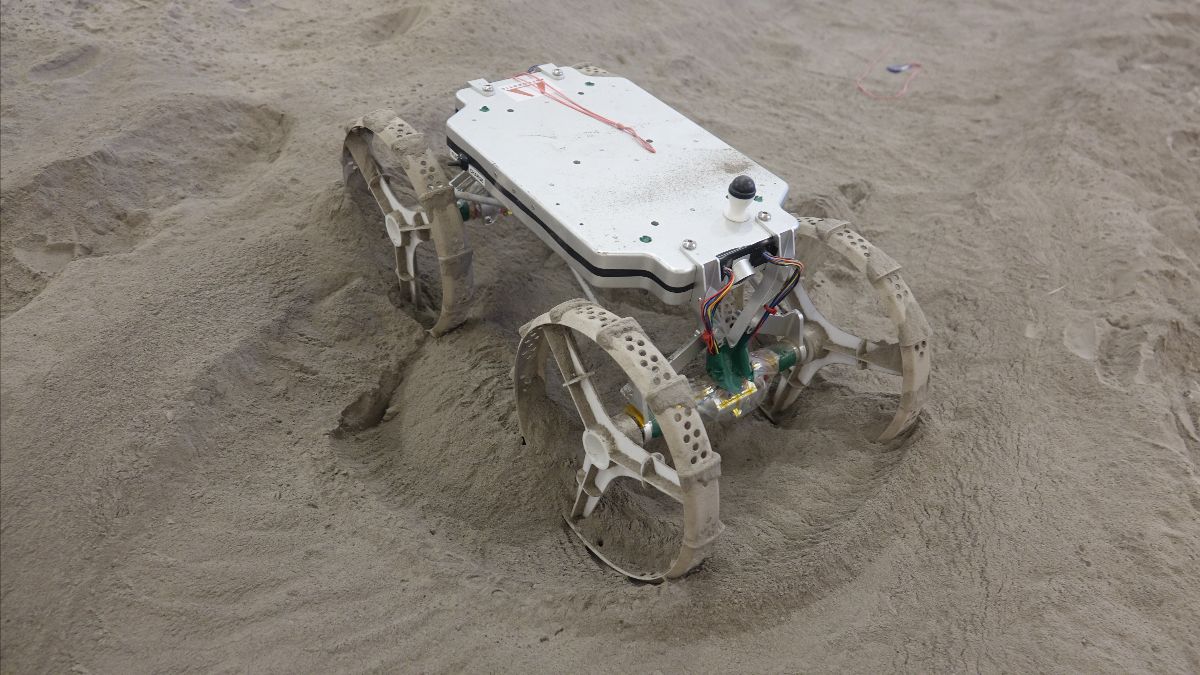
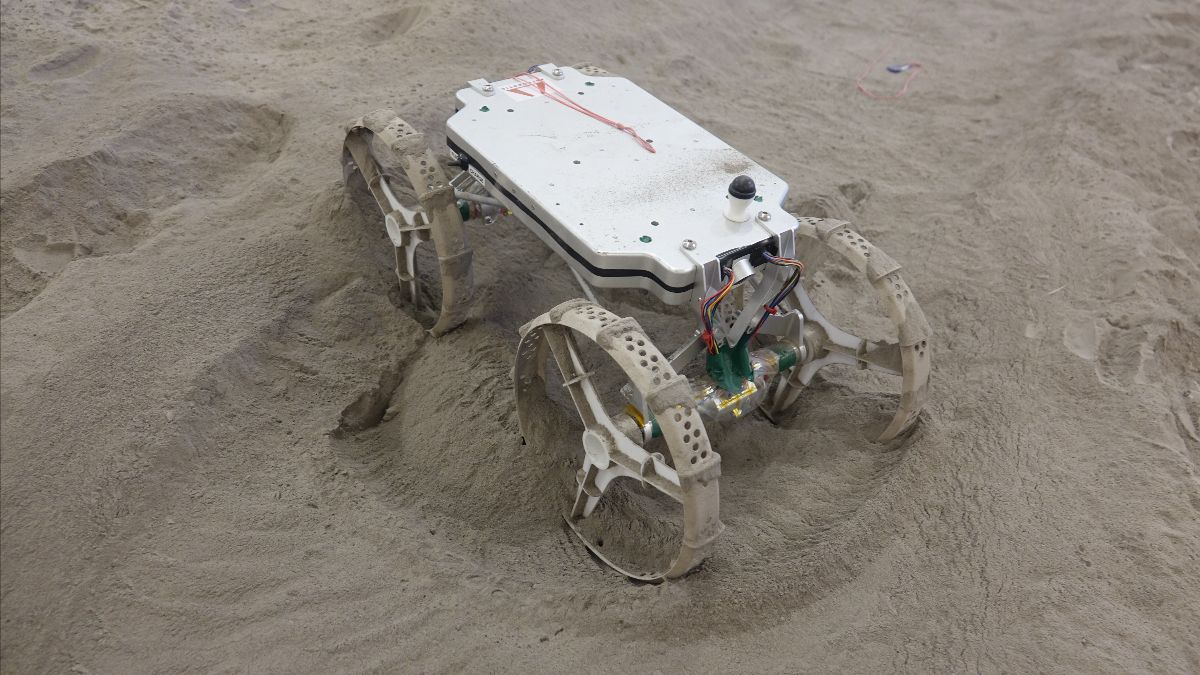
Dalším, na co se v tomto díle o firmě Astrobotic zaměříme, budou jejich projekty, které se týkají roverů. Za nejzajímavější považuji CubeRover. Ten je možné modifikovat do čtyřech různých velikostí 1U (10 × 10 × 10 centimetrů), 2U (20 × 10 × 10 centimetrů), 4U (20 × 20 × 10 centimetrů) a 6U (30 × 20 × 10 centimetrů), tedy stejně jako u CubeSatů. Nosnost jednotlivých verzí se pak shoduje se standardy těchto malých družic. Prototyp vozítka byl umístěn do komory s kameny a prachem, které simulovaly lunární regolit a firma tedy uvádí, že CubeRovery dokáží překonat svahy až do 30° a jejich maximální rychlost má být 10 centimetrů za sekundu. Teoreticky by tak CubeRover měl být schopný za jeden lunární den urazit několik kilometrů. Pro navigaci má vozítko užívat širokoúhlé přední a zadní kamery. Cena za jeden kilogram užitečného zatížení má být 4,5 milionů dolarů. Celkově se jedná o koncept, který by měl být díky malé velikosti poměrně levný na vývoj, a tak se zdá, že výsledná dostupnost může být ideální pro zákazníky, kteří by si rádi otestovali nové technologie. O dost větším vozítkem je Polaris. Jedná se o 1,7 metrů vysoký, 2,2 metrů široký a 2,4 metrů dlouhý rover, který je schopen pojmout velká zařízení včetně vrtáku, rypadla či robotického ramena. Rover má kapacitu užitečné zátěže 90 kilogramů a dokáže se pohybovat rychlostí 0,3 metrů za sekundu. Cena za jeden kilogram nákladu je pak stejná, jako u CubeRoveru. Polaris je zároveň kompatibilní s přistávacím modulem Griffin. Posledním, na co se podíváme, je rover MoonRanger. Ten by měl být dopraven na lunární povrch jakožto součást programu agentury NASA CLPS. Tam by měl prozkoumávat jižní pól a tvořit 3D mapu povrchu. Firma Astrobotic tak má rozděláno spoustu zajímavých a doufejme do budoucna užitečných konceptů. Jejich první pokus o přistání na Měsíci sice dopadl neúspěchem, ale zdá se, že o této firmě minimálně ve spojitosti s některými dalšími misemi, programem CLPS a Artemis ještě uslyšíme.
- Sídlo: Pittsburgh, Pennsylvania, Spojené státy americké
- Počet zaměstnanců: Kolem 130
- Generální ředitel: John Thornton
- Zaměření: Vývoj přistávacích modulů a vozítek za účelem dopravy užitečného nákladu na oběžnou dráhu či povrch Měsíce pro komerčního zákazníka
- Aktuální projekty a snahy: Participace v rogramu CLPS a Artemis, vývoj a rozvoj rozdělaných konceptů, otestování přistávacích modulů v praxi
Zdroje informací:
https://www.astrobotic.com/
https://www.space.com/astrobotic-technology
https://en.wikipedia.org/wiki/Astrobotic_Technology
https://www.nasaspaceflight.com/2024/01/…/
https://en.wikipedia.org/wiki/Google_Lunar_X_Prize
Zdroje obrázků:
https://www.astrobotic.com/…/.jpg
https://www.astrobotic.com/wp-content/uploads/2023/03/PeregrineFrontQuarterView_lowright_smWebsite.png
https://www.esa.int/var/esa/storage/images/…/24474581-4-eng-GB/Griffin_lander_pillars.jpg
https://www.astrobotic.com/…/49f75023-a4ed-4317-9c0a-82e341d87853.jpg




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Prvním realizovaným CubeRoverem už byl Iris na Peregrine. A Griffin by měli zvládnout, ztráta VIPERu už by taková legrace nebyla.
Díky za zajímavé shrnutí informací o této firmě. Jsem na její projekty opravdu zvědavý. V prvé řadě mě fascinuje ten nápad stavět (užitečné) rovery o velikostech 1U apod. Už to samo o sobě mi přijde hodně fascinující. Ano, pamatuju si pokus Japonců, kteří ve spolupráci s hračkářskou firmou udělali vozítko ještě menší. Ale to nemělo téměř nic umět – a navíc se zatím nedostalo do akce.
Některé jiné údaje jsou ale trochu mimo mou představivost. Např. ta rychlost jízdy mi přijde několikrát vyšší než kolik si myslím, že uváděly zkušené pozemní týmy např. Perservance jako bezpečnou mez. Nebo se pletu? A to má P. superkola vyvíjená na odolnost mnoho let a několik verzí z minulých roverů, a stejně tak zbytek (zavěšení kol apod.).
No,jsem zvědavý, jak bude čas postupně odhalovat rozdíl mezi marketingem a realitou 🙂
Ohledně té rychlosti to dává smysl. Vstupují do toho dva faktory: Jedním je pokrok v umělé inteligenci a řízení, které dává víc možností automaticky reagovat na překážky. Navíc malému roveru stačí malé zorné pole, ve kterém se bude navigovat. Druhým je starý známý zákon druhé a třetí mocniny. Ten říká, že odolnost materiálu roste s druhou mocninou velikosti a hmotnost s třetí mocninou. Tedy malé věci jsou odolnější, než když je zvětšíte. Klasický případ s mravencem, který unese mnohonásobek své váhy, ale zvětšený na velikost člověka by nejspíš ani nemohl chodit. Slon si zláme kosti po pádu z výšky, která pro člověka není problém.