V minulém týdnu zaznamenala Indie na Měsíci klíčový úspěch, její přistávací modul byl první, který měkce dosedl v polárních oblastech Měsíce. Koncem srpna by měla startovat další měsíční sonda. Ta pochází z Japonska a bude přistávat v rovníkové oblasti. V nedávném článku jsem psal o dvou sondách, které se chystaly přistát v blízkosti jižního pólu Měsíce. První z nich byla ruská sonda Luna 25. Ta bohužel selhala při úpravě dráhy okolo Měsíce, kdy motor pracoval déle a sonda 20. srpna 2023 dopadla tvrdě na měsíční povrch a rozbila se.

Mise Čandraján 3 (Chandrayaan) však byla úspěšná a měkce na měsíčním povrchu přistála 23. srpna 2023 ve 14:32 SELČ. Přistávací modul Vikram bezpečně dosedl u kráteru Manzinus U, který je nepříliš daleko od jižního pólu. Byl to teprve čtvrtý stát, který realizoval měkké přistání na Měsíci a první, který dosednutí realizoval v širším okolí pólu.
Zdroj: ISRO
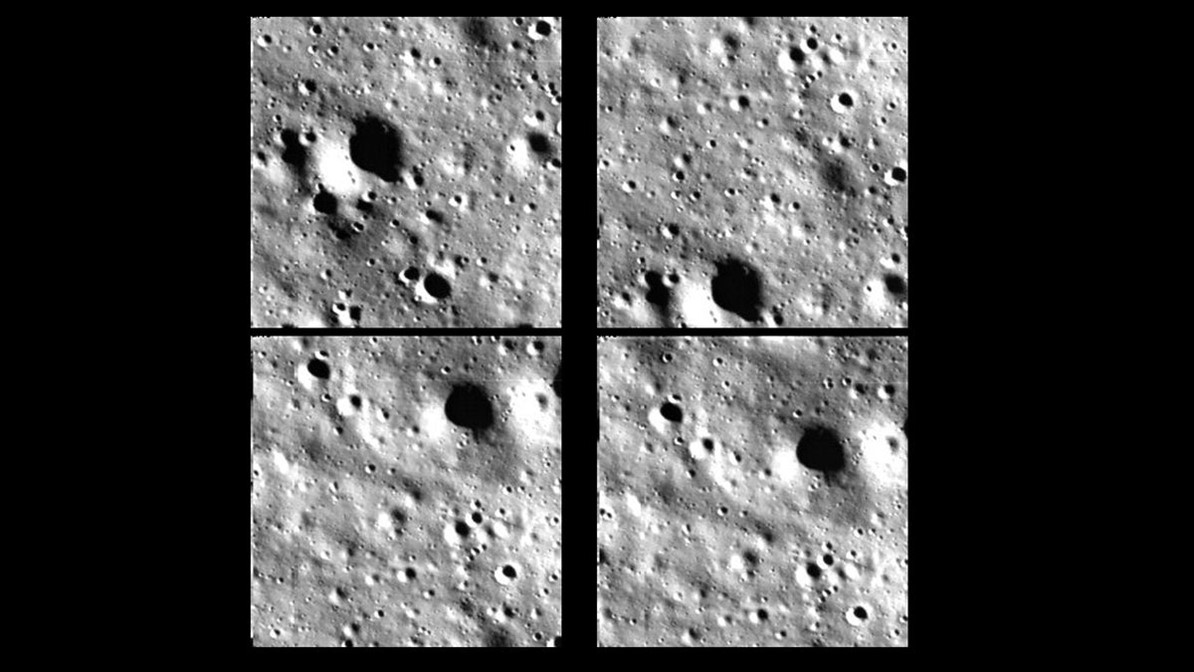
Modulu se přistání podařilo, i když musel na poslední chvíli realizovat úhybný manévr k bezpečnějšímu místu. Přistání bylo potvrzeno po dosednutí pomocí vysílání modulu Vikram zachyceného soustavou pozemských antén. Již při přistávání byly pořízeny první snímky místa přistání. Zároveň velice brzy našla a identifikovala lunární modul Vikram orbitální část předchozí mise Čandraján 2.
Druhý den 24. srpna sjelo z modulu Vikram vozítko Pragján (Pragyan). Vozítko ujelo svých prvních osm metrů a potvrdilo se, že modul i vozítko jsou v pořádku. Modul i vozítko budou podle plánů pracovat zhruba dva týdny.
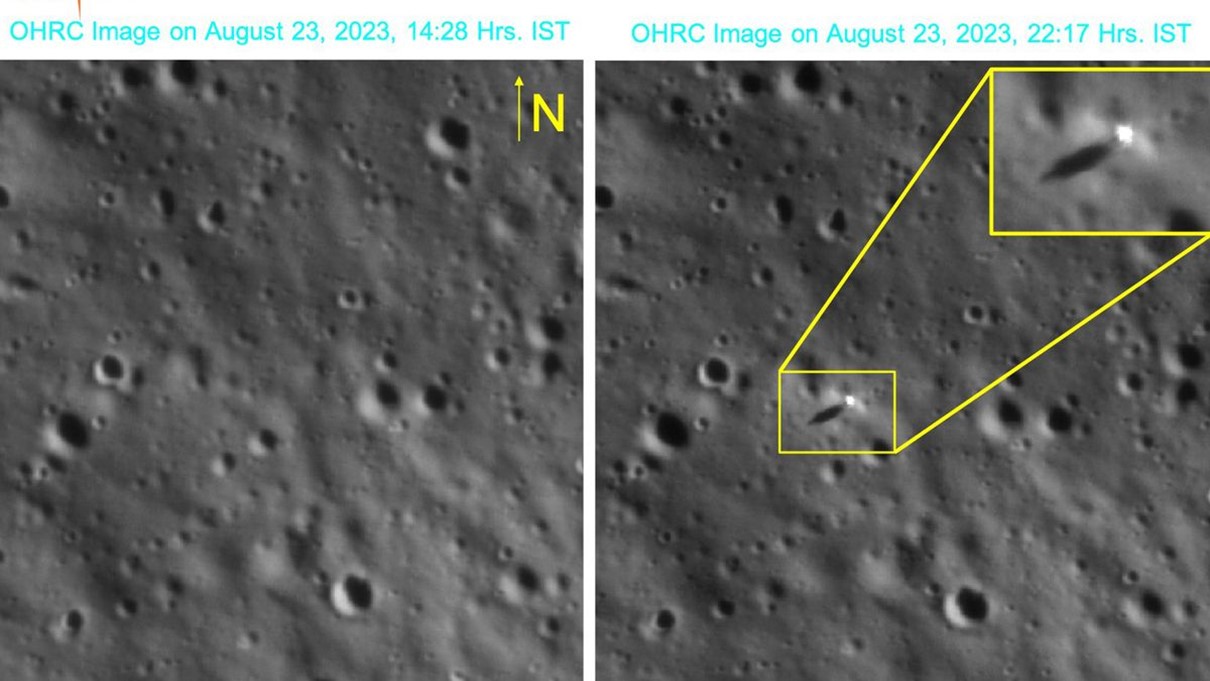
Zdroj: ISRO
Nemají totiž energetické zdroje, které by jim umožnily přežít delší dobu, a hlavně překonat dlouhou měsíční noc. Mají pouze fotovoltaické panely. Vozítko bude studovat měsíční regolit a skály pomocí dvou spektrometrů na palubě, modul Vikram bude provádět výzkum lunatřesení, tenké atmosféry a teploty povrchových vrstev. Vozítko se bude pohybovat v dohledu kamer modulu Vikram. Následující necelé dva týdny tak budou opravdu nabité. Chystají se však i další měsíční mise.
Připravuje se nový start japonského měsíčního modulu SLIM
Do finále se blíží příprava startu japonského měsíčního modulu SLIM (Smart Lander for Investigating Moon). Zrod představy podobného projektu Japonska se dá umístit do roku 2005, ale reálné práce na něm začaly na přelomu roku 2013 a 2014. Jde o malou sondu, která má vyladit přistání na vesmírných objektech. Hlavním úkolem mise je testovat možnosti velmi přesného přistávání malých vesmírných aparátů. Využije se velmi inovativní metoda, kdy se v průběhu přistávání bude identifikovat reliéf a krátery podle jejich vzhledu známého z fotografií měsíčních družic. Modul by měl měkce přistát s přesností okolo sto metrů. Jeho hmotnost při startu je 590 kg a čistá hmotnost 120 kg. Rozměry jsou 1,5×1,5×2,0 m.
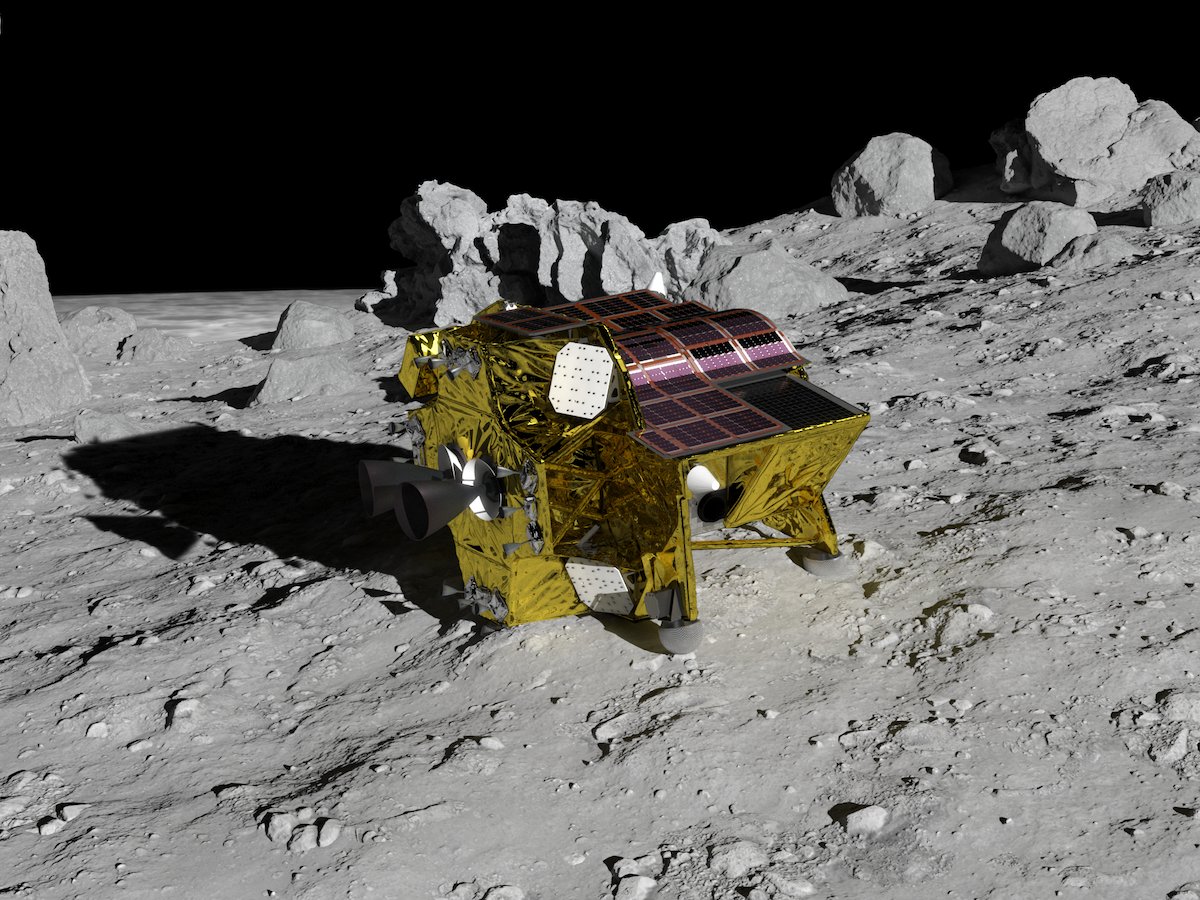
Zdroj: JAXA
Měl by s sebou nést i miniaturní vozítko LEV-2 (Lunar Excursion Vehicle 2). Jeho průměr je zhruba 8 cm a hmotnost 250 g. Pokud se to podaří, půjde o druhý pokus dopravit vozítko s přezdívkou SORA-Q na měsíční povrch. Měl by nést i druhého miniaturního pohyblivého robotka, tentokrát skákajícího, LEV-1.
Lunární modul SLIM bude vynesen společně s družicí XRISM (X-Ray Imaging and Spectroscopy Mission), která bude zkoumat rentgenovské záření, pomocí japonského nosiče H-IIA. Původní datum startu bylo 26. srpna 2023, ale kvůli předpovědi špatného počasí se posunulo na 28. srpna, záložní datum startu je o den později.
Přistát by měl v blízkosti mladého impaktního kráteru Šioli (Shioli), který se nachází uvnitř většího kráteru Cyrillus na přivrácené straně Měsíce relativně blízko rovníku. Pokud se přistání Japonsku podaří, připojí se k USA, Sovětskému svazu, Číně a Indii, jako pátý úspěšný stát. Na úspěch projektu by pak navázala celá série výzkumných aparátů přistávajících velmi přesně na různých zajímavých místech Měsíce. Jednalo by se o další japonský příspěvek do měsíčního projektu Artemis. I když půjde dominantně o technologickou misi ověřující inovativní metody přistávání na vesmírných tělesech a práce v prostředí s nízkou gravitací, mohl by přinést i řadu zajímavých vědeckých poznatků.

Zdroj: JAXA
Příprava měsíční družice Lunar Trailblazer
Na začátku roku 2024 by pak mohla startovat družice Měsíce Lunar Traiblazer. Patří do programu lehkých, sonda má hmotnost okolo 200 kg, a levných misí SIMPLEx (Small Innovative Missions for Planetary Exploration). Zaměřena bude na hledání a zkoumání přítomnosti vody na Měsíci. Infračervené detektory ve dvou přístrojích sondy budou z oběžné dráhy hledat známky molekul vody a také velmi chladná místa, kde by se mohl hromadit led. Měly by se zaměřit na koloběh vody na Měsíci. Předpokládá se, že by se mohla voda vytvářet adsorpcí odpovídajících atomů pocházejících ze slunečního větru na velmi chladných površích. Tam se může vázat do hornin.

Zdroj: https://d2pn8kiwq2w21t.cloudfront.net/
Při jejich opětném ohřátí by voda sublimovala, ale část molekul by se následně mohla adsorbovat na dlouhodobě chladných místech. K jejímu hromadění by tak mohlo docházet na pólech, kde jsou extrémně chladná místa, kde nedopadá sluneční svit. Naše znalosti o výskytu vody na Měsíci a cyklech jejího koloběhu jsou zatím v plenkách. Zároveň sonda přispěje i ke studiu složení měsíčních hornin z oběžné dráhy. Nedávno se na Kosmonautixu psalo, že na ní byl v rámci přípravy umístěn poslední přístroj.
Spolu s ní by mohl startovat další měsíční přistávací modul IM-2 firmy Intuitive Machines se zařízením PRIME-1, který by mohl přistát v stále zastíněném kráteru Shackleton a hledat tam vodu. Pomohlo by mu v tom vrtací zařízení. Kdy přesně a v jaké sestavě tato popsaná zařízení odstartují není pořád ještě úplně jisté. V každém případě však jsou předzvěstí rostoucí aktivity měsíčních automatických misí před opětným návratem člověka na Měsíc v rámci projektu Artemis.






Jen upřesnění: „Spolu s ní (s Lunar Trailblazer) by mohl startovat další měsíční přistávací modul IM-2 firmy Intuitive Machines a lunární přistávací modul PRIME-1, který by mohl přistát v stále zastíněném kráteru Shackelton a hledat tam vodu. Pomohlo by mu v tom vrtací zařízení.“
Toto vypadá, jako kdyby přistávaly dva moduly – IM2 a PRIME-1. Ve skutečnosti je PRIME-1 pouze vrtací zařízení umístěné na IM-2, což je lander společnosti Intuitive Machines s názvem Nova-C.
Ciatce z https://www.nasa.gov/directorates/spacetech/game_changing_development/projects/PRIME-1
PRIME-1 tvoří dvě součásti, které obě budou namontovány na komerční lunární přistávací modul:
Vrták „The Regolith and Ice Drill for Exploring New Terrain“ (TRIDENT) bude vrtat až tři stopy hluboko a vytěží lunární regolit neboli půdu až na povrch. Přístroj může vrtat ve více segmentech, pozastavit se a zasunout, aby po každém přírůstku hloubky uložil na povrch odřezky.
Spektrometr „Mass Spectrometer observing lunar operations“ (MSolo). Tento komerční a běžně dostupný hmotnostní spektrometr upravený pro kosmické lety bude vyhodnocovat vrtné úlomky na přítomnost vody a dalších chemických sloučenin. Budou analyzovány vzorky půdy z různých hloubek.
Je to tak. Ale zdá se, že ten poslední odstavec článku zůstane fakticky defektní už navždy.
Tak nezůstane 🙂
SLIM s sebou neveze pouze v článku zmíněný rover LEV-2 (Lunar Excursion Vehicle 2), tedy další pokus o doručení Sora-Q na Měsíc, ale také skákající rover LEV-1. Což také není žádné monstrum, ale přece jen jde o vyspělejšího partnera Sora-Q.
Děkuji za doplnění, robotka LEV-2 jsem zdůraznil, protože byl v předchozí neúspěšné misi. Pokud se nemýlím, LEV-1 tam nebyl.
Pokračování videozáznamu s Pragján je prý na twítu ISRO (nehodlám jej mít).
Tak tady z YT: https://youtu.be/Qx3jbtq2EFg
Chtěl jsem vidět přejezd prohlubně ale není zachycen.
Perfekt, díky za přidání odkazu, moc pěkné video. Také lituji, že není zachycen ten průjezd „kráterkem“.
Jen upřesnění: „Spolu s ní (s Lunar Trailblazer) by mohl startovat další měsíční přistávací modul IM-2 firmy Intuitive Machines a lunární přistávací modul PRIME-1, který by mohl přistát v stále zastíněném kráteru Shackelton a hledat tam vodu. Pomohlo by mu v tom vrtací zařízení.“
Toto vypadá, jako kdyby přistávaly dva moduly – IM2 a PRIME-1. Ve skutečnosti je PRIME-1 pouze vrtací zařízení umístěné na IM-2, což je lander společnosti Intuitive Machines s názvem Nova-C.
Ciatce z https://www.nasa.gov/directorates/spacetech/game_changing_development/projects/PRIME-1
PRIME-1 tvoří dvě součásti, které obě budou namontovány na komerční lunární přistávací modul:
Vrták „The Regolith and Ice Drill for Exploring New Terrain“ (TRIDENT) bude vrtat až tři stopy hluboko a vytěží lunární regolit neboli půdu až na povrch. Přístroj může vrtat ve více segmentech, pozastavit se a zasunout, aby po každém přírůstku hloubky uložil na povrch odřezky.
Spektrometr „Mass Spectrometer observing lunar operations“ (MSolo). Tento komerční a běžně dostupný hmotnostní spektrometr upravený pro kosmické lety bude vyhodnocovat vrtné úlomky na přítomnost vody a dalších chemických sloučenin. Budou analyzovány vzorky půdy z různých hloubek.
Je to tak. Ale zdá se, že ten poslední odstavec článku zůstane fakticky defektní už navždy.
Tak nezůstane 🙂
SLIM s sebou neveze pouze v článku zmíněný rover LEV-2 (Lunar Excursion Vehicle 2), tedy další pokus o doručení Sora-Q na Měsíc, ale také skákající rover LEV-1. Což také není žádné monstrum, ale přece jen jde o vyspělejšího partnera Sora-Q.
Děkuji za doplnění, robotka LEV-2 jsem zdůraznil, protože byl v předchozí neúspěšné misi. Pokud se nemýlím, LEV-1 tam nebyl.
Pokračování videozáznamu s Pragján je prý na twítu ISRO (nehodlám jej mít).
Tak tady z YT: https://youtu.be/Qx3jbtq2EFg
Chtěl jsem vidět přejezd prohlubně ale není zachycen.
Perfekt, díky za přidání odkazu, moc pěkné video. Také lituji, že není zachycen ten průjezd „kráterkem“.