Dnešním dnem začíná na ISS období, které se ponese ve znamení hned tří výstupů do volného prostoru. Jejich úkolem bude především rozsáhlá údržbová akce spojené se zařízením Mobile Servicing System. Úkolů bude hned několik a největším z nich je náhrada záchytového mechanismu na staničním robotickém ramenu SSRMS (Space Station Remote Manipulator System). Tato servisní akce má zajistit, že robotická paže bude své komplexní a důležité úkoly plnit spolehlivě i v příštím desetiletí – v poslední době totiž tento systém začínal vykazovat problémy.
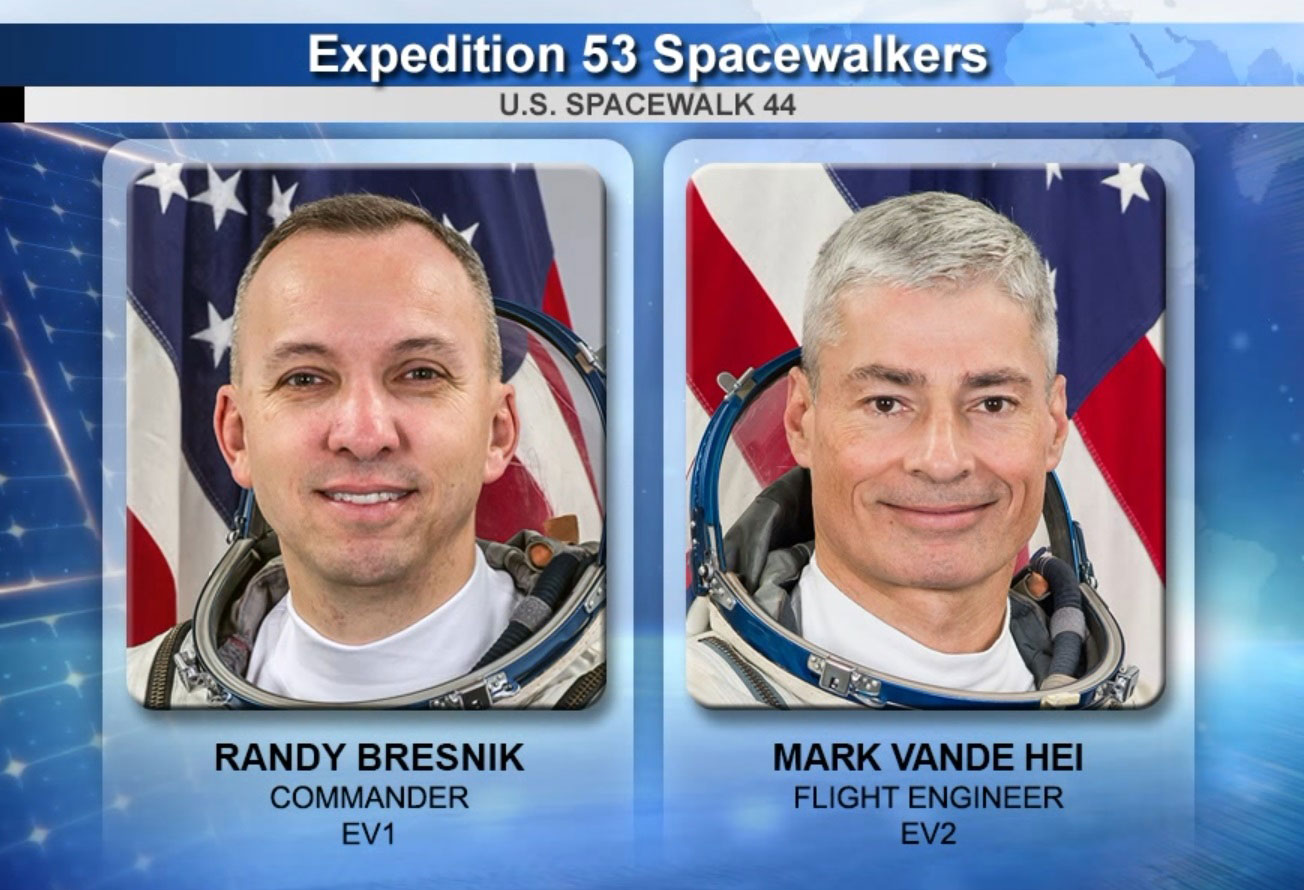
Tři výstupy jsou plánované na 5., 10. a 18. října, přičemž všechny mají naplánovaný začátek ve 14:05 SELČ (u každého Vám přineseme krátký článek s přímým přenosem). Výstupy mají trvat šest a půl hodiny a jejich hlavní postavou bude velitel 53. dlouhodobé expedice Randolph Bresnik, který se zúčastní všech tří kosmických vycházek. Při prvním a druhém výstupu se k němu přidá jeho krajan Mark Vande Hei a třetí výstup absolvuje Joe Acaba.

Zdroj: https://upload.wikimedia.org
Úkolem prvního plánovaného výstupu je výměna mechanismu LEE-A (Latching End Effector A), který najdeme na paži Canadarm 2 (jiný název pro SSRMS). Právě na tomto dílu se v minulosti objevily známky stárnutí včetně poruch motorů. Dva následující výstupy budou věnovány promazávání nového LEE-A, čímž bude zajištěn plynulý chod Canadarm 2. Kromě toho astronauti udělají několik dodatečných úkolů – vymění externí kamery na příhradovém nosníku a na modulu Destiny, nebo provedou drobné rekonfigurace vybavení na vnějších částech stanice.
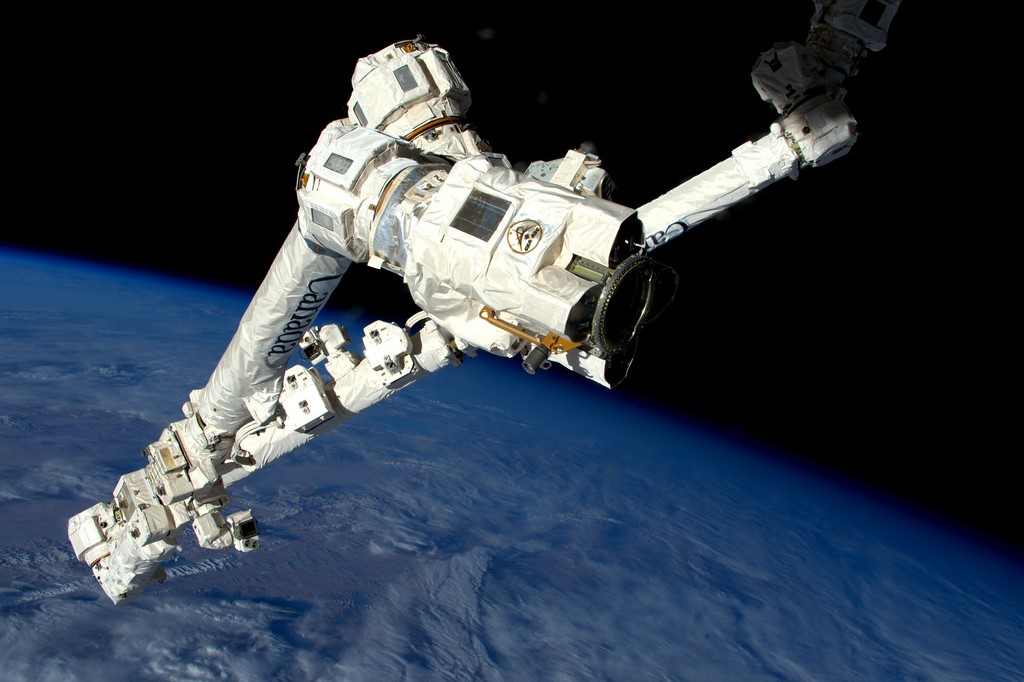
Staniční rameno Canadarm 2 měří na délku 17,6 metru a jedná se o jeden z klíčových systémů stanice, který plní řadu kriticky důležitých funkcí. Zachytává, připojuje, odpojuje a vypouští zásobovací lodě Dragon, Cygnus a HTV, instaluje externí přístroje a dále s nimi manipuluje, pomáhá astronautům při výstupech tím, že hýbe s nákladem, nebo se samotnými astronauty. Kromě toho nese i nástavec Dextre pro jemnější práci, čímž dokáže nahradit některé činnosti, které by jinak vyžadovaly výstupy do volného prostoru. Z hlediska těchto úkolů je logické, že se NASA snaží zajistit provoz SSRMS a předejít situaci, kdy by ISS zůstala (byť jen dočasně) bez možnosti jejího používání.
Zdroj: http://spaceflight101.com
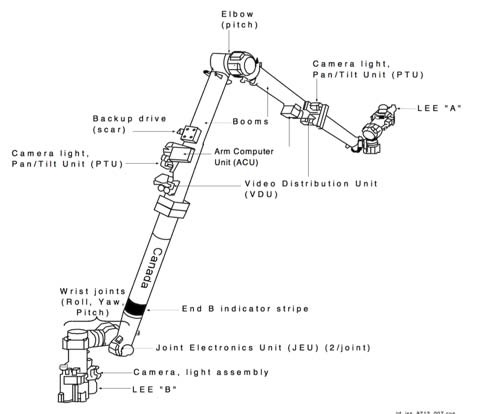
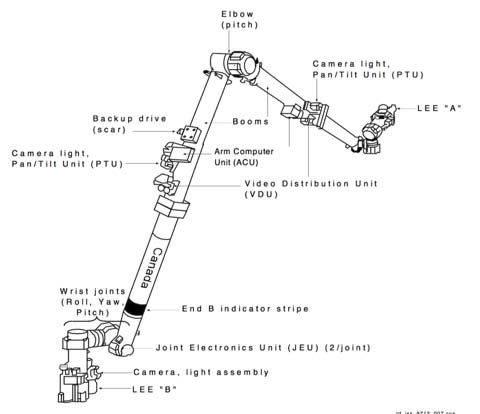
Samotný Canadarm 2 je vlastně zvětšenou a vylepšenou variantou robotické paže, která létala na amerických raketoplánech. SSMRS se na stanici dostal na palubě raketoplánu Endeavour v rámci mise STS-100 v dubnu roku 2000. Rameno disponuje sedmi motorizovanými klouby – uprostřed se nachází „loketní“ kloub a dále jsou zde dvě trojice rotačních kloubů, které vytváří „rameno“ a „zápěstí“. Díky tomu má rameno sedm stupňů volnosti pohybu – podobně jako lidská paže jen s mnohem větším rozsahem pohybu.
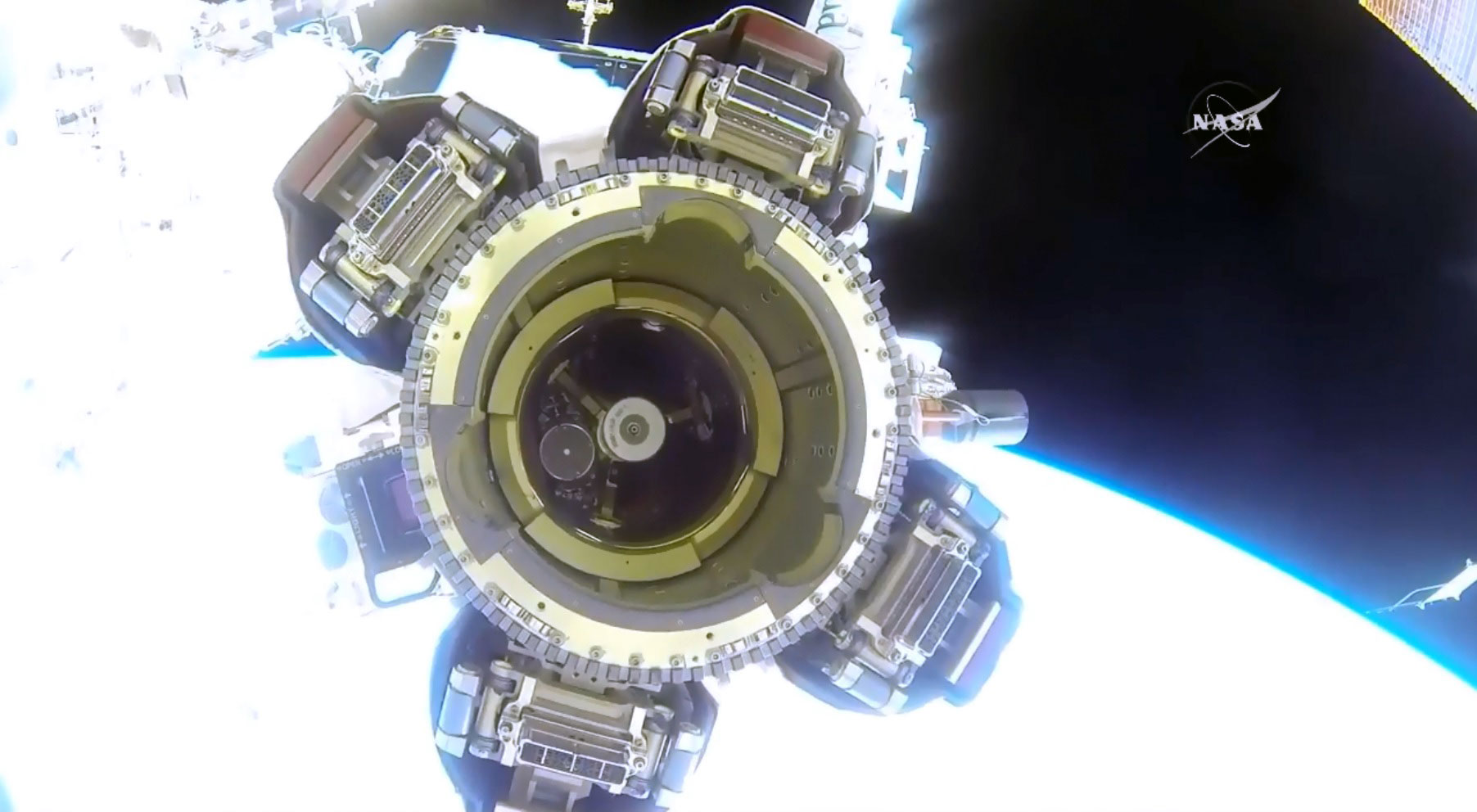
Na obou koncích ramene se nachází prvek LEE ( Latching End Effector), který umožňuje, aby se rameno mohlo samo přemísťovat mezi jednotlivými záchytnými body Power & Data Grapple Fixtures. Ty jsou rozmístěné po povrchu stanice, přičemž rameno se může připojiti k pohyblivému vozíku Mobile Base System, který jej může dopravit kamkoliv po příhradové konstrukci. Díky tomu má SSRMS zajištěné, že se dostane na kterékoliv místo. Pohyb ramene je velmi chytrý – volný konec se připojí na záchytný bod a ve chvíli, kdy je zajištěno pevné spojení, dojde k uvolnění druhého konce, který je volný a může se zachytit někde jinde, nebo se ujmout nákladu.
Zdroj: https://upload.wikimedia.org/
Celá robotická paže váží 1800 kilogramů a její průměr je 35 centimetrů, přesto je certifikována na manipulaci s náklady o hmotnosti až 116 tun. Díky tomu mohlo rameno pomáhat i s připojováním raketoplánu. První loď byla s jeho pomocí zachycena v září roku 2009, přičemž šlo o první exemplář japonského náklaďáku HTV. Dodnes už rameno obsloužilo 26 zásobovací lodí!

Zdroj: https://upload.wikimedia.org
V úvodních letech rameno ovládali astronauti z modulu Destiny a v té době šlo o velmi důležitý prvek při sestavování stanice – ať už šlo o připojování jednotlivých přetlakových modulů, nebo dílů příhradové konstrukce. V roce 2010 se operátoři ramene mohli přesunout na nové místo – do modulu Cupola vybaveného panoramatickými okny. Díky tomu měli o pohybu ramene mnohem lepší přehled.
V roce 2008 dostala hlavní robotická paže malého pomocníka – již zmíněný manipulátor Dextre. Obsluha obou dílů se postupně přesunula od posádky na palubě na pozemní středisko. Tím se nejen ušetřil cenný čas astronautů, ale také bylo možné využívat robotický systém k více úkolům včetně údržby stanice. Asi nejlepší důkaz významu robotické paže a manipulátoru Dextre přišel na začátku letošního roku. Tehdy bylo potřeba vyměnit dvanáct baterií na příhradovém nosníku S4, přičemž pokud by nebyl k dispozici robotický systém, museli by astronauti vystoupit do volného prostoru šestkrát. Jelikož ale pozemní týmy mohly využít služeb robotického ramene, vystoupili astronauti ven pouze dvakrát! Hlavní rameno a Dextre přemístili všechny staré a nové baterie na správná místa a při kosmické vycházce pak už stačilo jen udělat jemnou činnost jako je propojení kabelů.
To, že s ramenem není vše v pořádku, se začalo ukazovat už v minulých letech. Telemetrie z obou dílů LEE dávala velmi dobrou představu o stavu této techniky a tak už v roce 2015 začali astronauti během výstupů pečovat o díly LEE – promazávali jejich pohyblivé části, jakmile data ukázala, že motory ovládající západky odebírají vyšší proud, než by měly. První konec (LEE-A) promazal astronaut Terry Virts v únoru 2015 a druhý konec (LEE-B) obsloužil Scott Kelly v říjnu téhož roku. Promazávání se nevyhnulo ani manipulátoru Dextre, který přišel na řadu na začátku letošního roku.
Zdroj: https://spaceflight101.com
S přihlédnutím k tomu, že oba díly LEE výrazně překročily původně plánovanou desetiletou službu a na obou se již projevují poruchy, bylo jasné, že na přelomu let 2017 a 2018 bude muset přijít jejich výměna. Jako první měl být nahrazen LEE-B, jehož technický stav je horší než v případě LEE-A. Příprava na výměnný výstup začala v červenci letošního roku.
22. srpna letošního roku se robotická paže přesouvala k vozíku Mobile Base System, kde se měla připravit na výměnu zařízení RPCM (Remote Power Control Module), které se nedařilo uzavřít. LEE-A se však nedokázal připojit k vozíku Mobile Base System a motory již dosáhly vysokého odběru proudu. Výsledkem bylo odvolání výměny RPCM za účelem dodatečného sběru informací. Kontrola provedená 13. září neprokázala žádné známky viditelného poškození.

Zdroj: https://upload.wikimedia.org
NASA ve spolupráci s Kanadskou kosmickou agenturou, která zajišťuje ovládání ramene, rozhodla, že bude vhodnější vyměnit LEE-A dříve než LEE-B. Rozhodlo se tedy, že k první výměně dojde v říjnu a LEE-B bude vyměněn v lednu 2018. Pozitivní bylo, že LEE-A nebyl potřebný k oddělení lodi Dragon, které přišlo 17. září. Dragony totiž disponují pouze záchytným bodem, který je jednodušší a neobsahuje elektrická a datová spojení – u nich je potřeba, aby se aktivovaly všechny západky pro přenos energie a dat. Naopak nadcházející mise lodi Cygnus bude tato spojení potřebovat – musí tedy být k dispozici rameno, které má oba LEE plně provozuschopné.
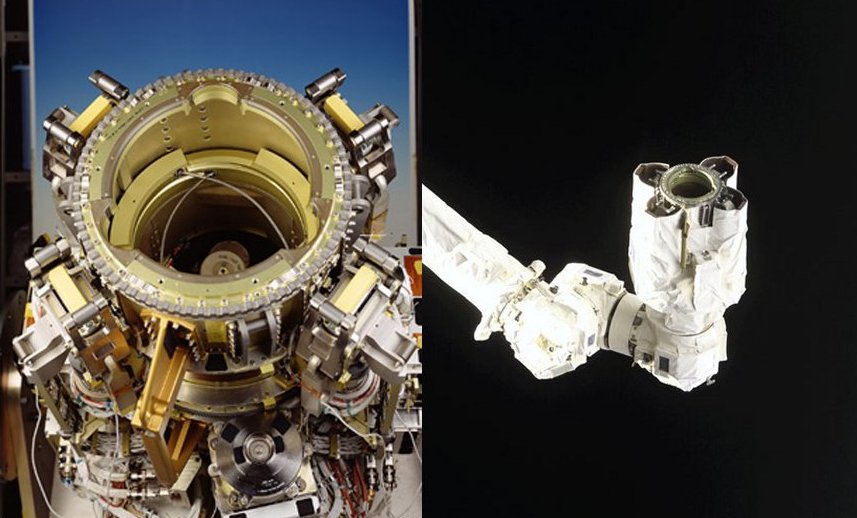
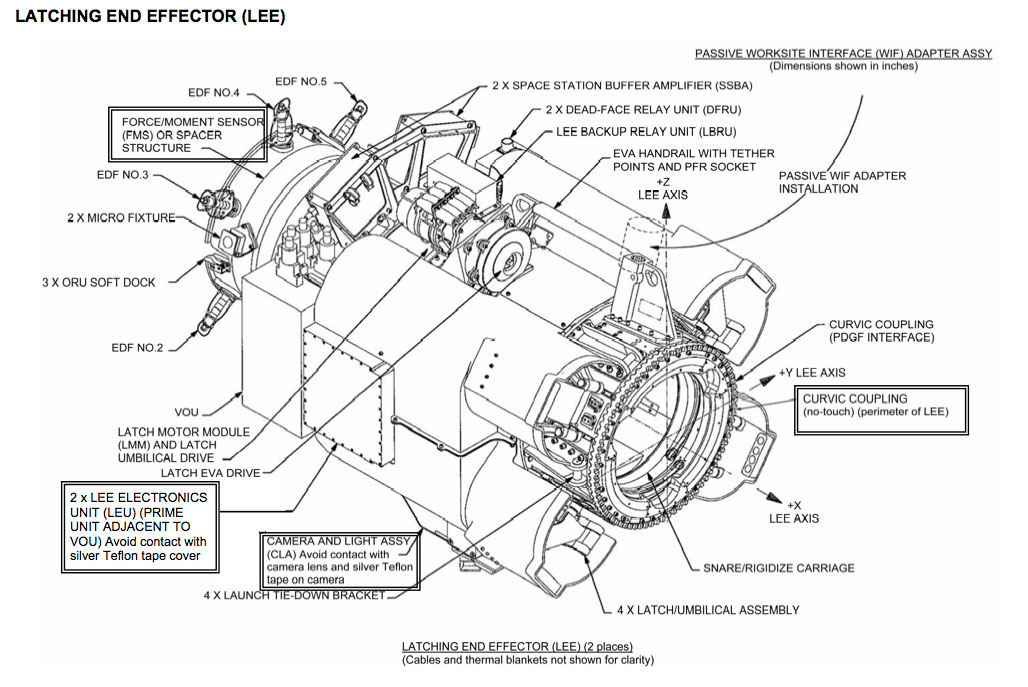
LEE na SSRMS, manipulátoru Dextre a Mobile Base System patří k nejkomplexnějším elektromechanickým systémům na celé stanici. V jejich útrobách se nachází velké množství aktuátorů, avioniky, senzorů silového momentu a navíc je zde i kamera pro přenos obrazu pro ty, kdo rameno ovládají. Každý LEE váží 200 kilogramů a na délku měří lehce přes jeden metr. Už při návrhu celé Canadarm 2 se počítalo s tím, aby bylo její díly možné vyměnit při výstupu do volného prostoru.
Zdroj: https://upload.wikimedia.org/
Výhodou je, že v současné době má americký segment čtyři členy posádky. Dva muži tak mohou pomáhat svým kolegům, kteří vystoupí do volného prostoru. Pro všechny tři výstupy oblékne Randolph Bresnik skafandr EMU #3003 s červenými pruhy. Mark Vande Hei a Joe Acaba využijí skafandru EMU #3008. Dnešní výstup bude mít označení U.S. EVA-44 a pro Bresnika půjde již o třetí kosmickou vycházku, zatímco Vande Hei zažije v tomto směru premiéru.
Zdroj: http://spaceflight101.com
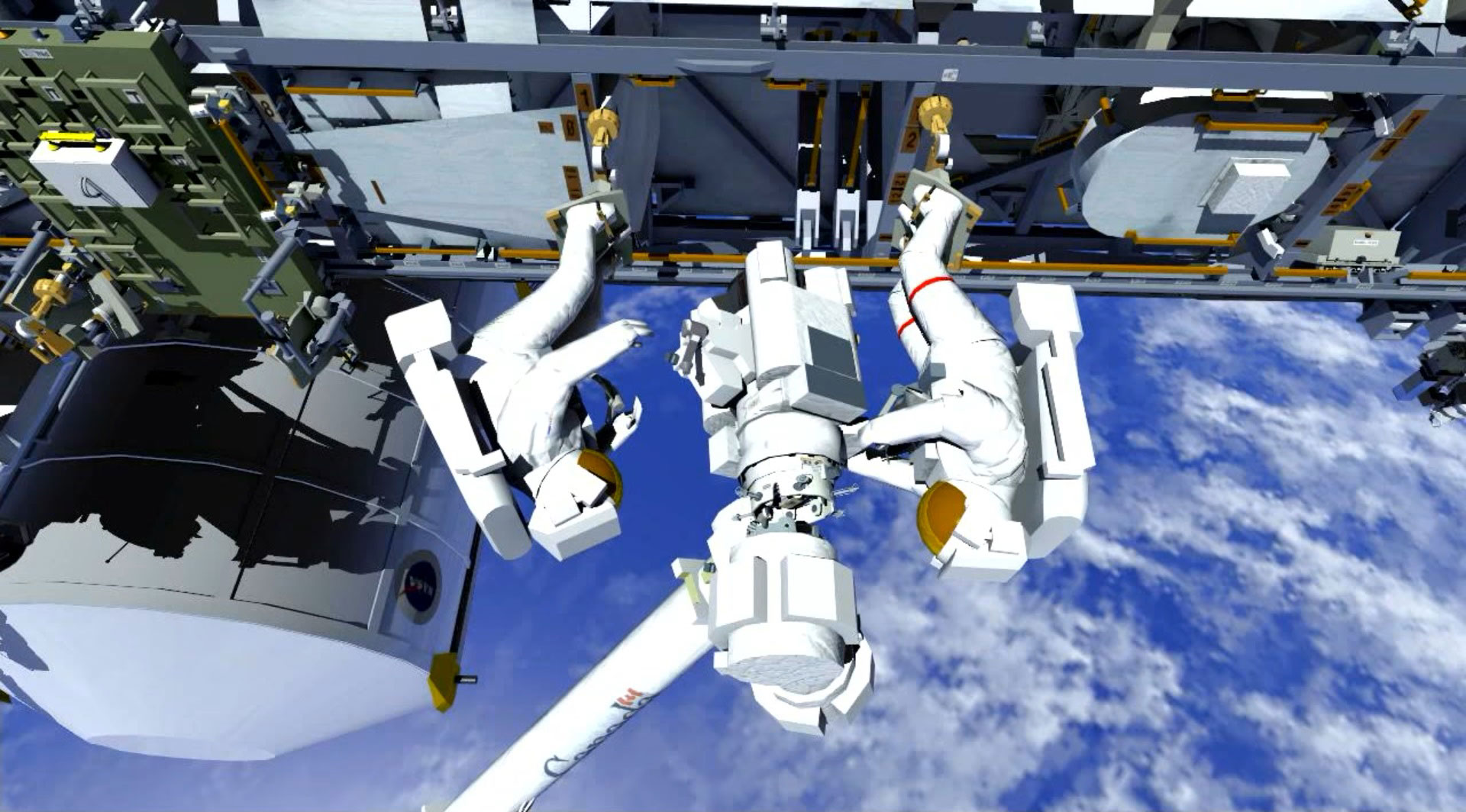
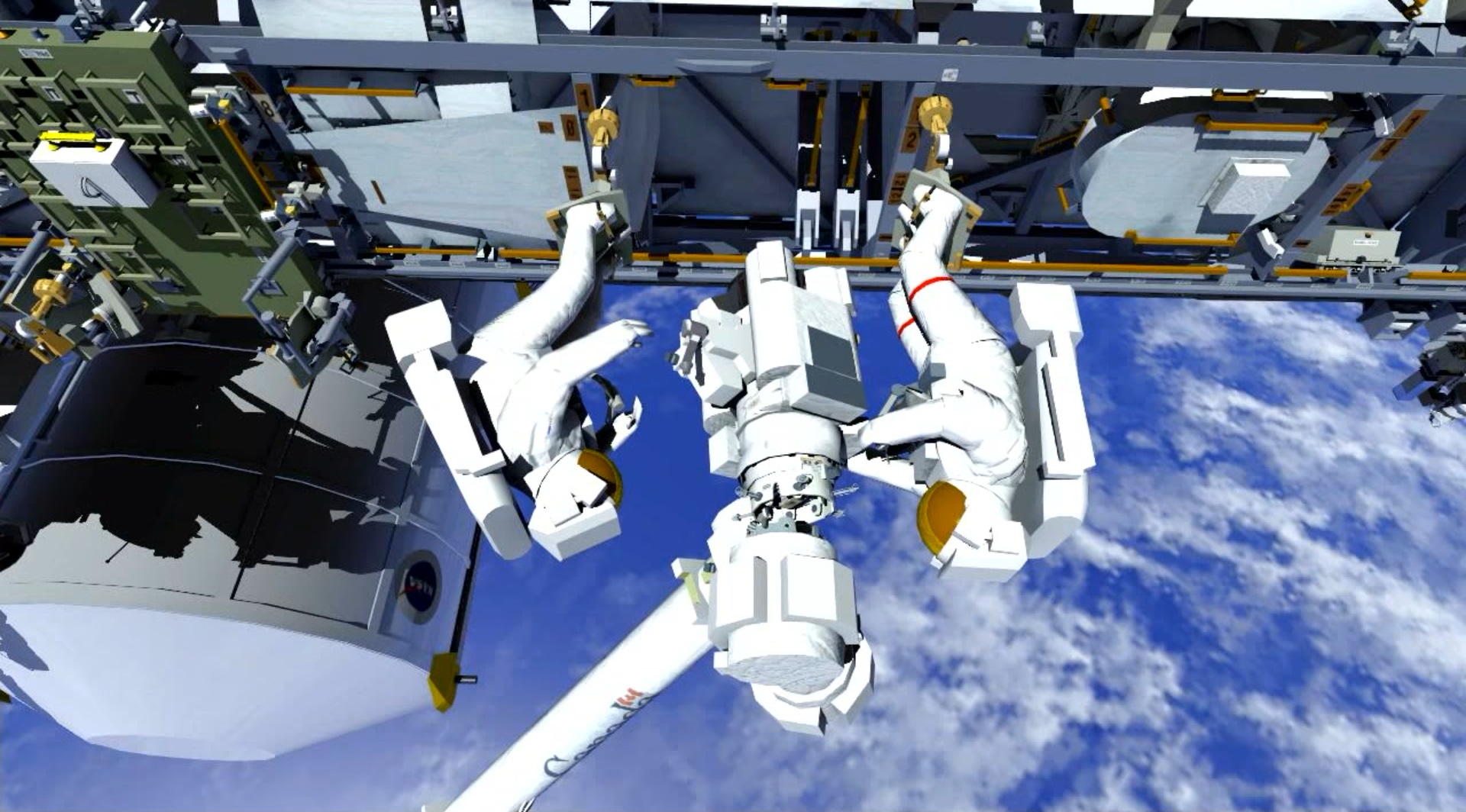
Oba astronauti opustí přechodovou komoru modulu Quest a Bresnik s sebou vezme nářadí, zatímco Vande Hei přinese zařízení pro podporu nohou. Oba muži zamíří k příhradové konstrukci, kde bude na dalších několik hodin jejich pracoviště. Astronauti sem připojí podporu pro nohy a pak vydají Paolo Nespolimu pokyn, aby domanévroval s robotickou paží tak, aby LEE-A byl mezi oběma astronauty. Pak budou moci zahájit vlastní výměnu.
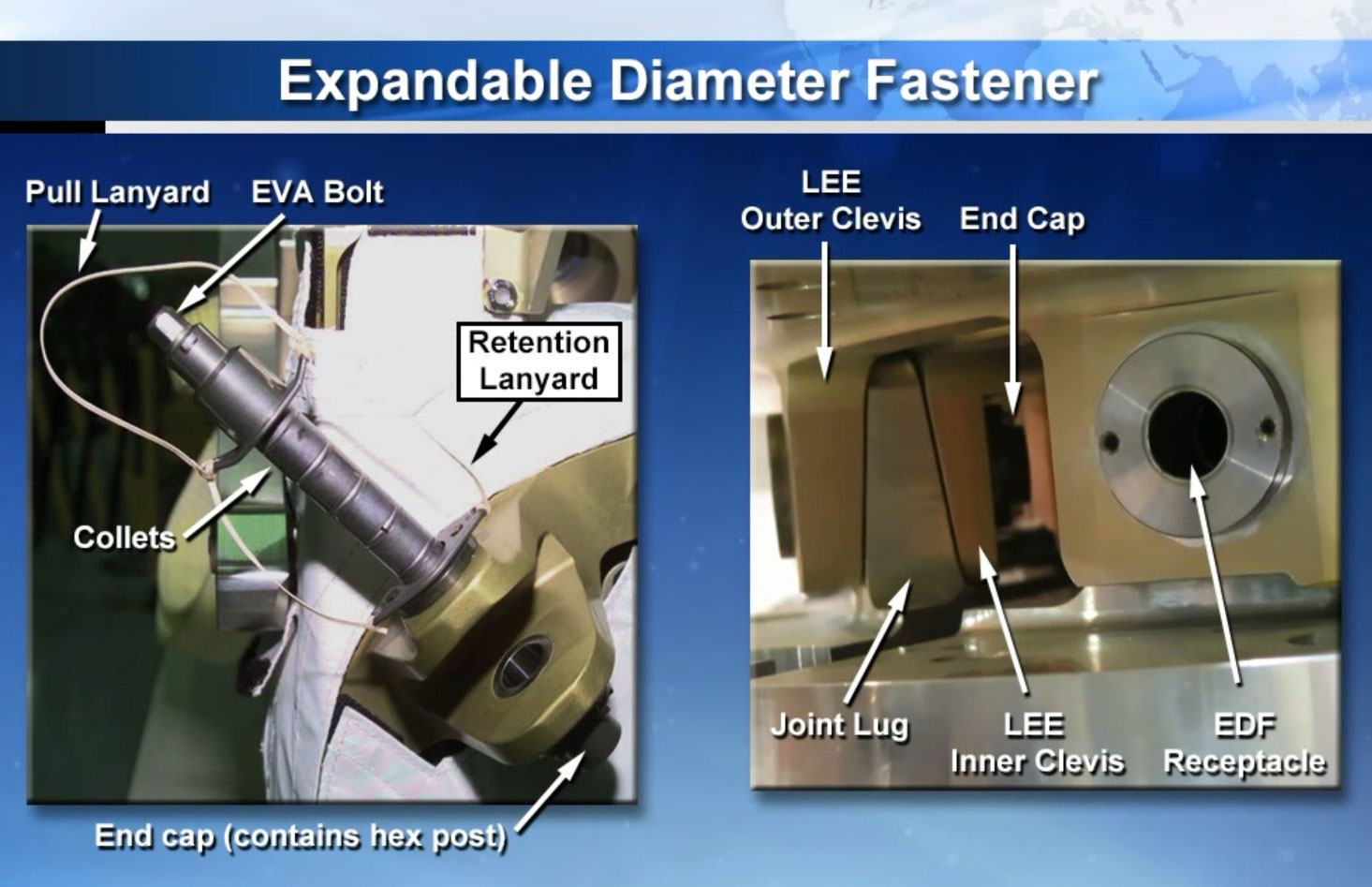
Ze všeho nejdříve bude potřeba odstranit dvojici termálních a mikrometeorických ochranných vrstev, čímž dojde k odhalení vlastního kloubového rozhraní. V něm je šestice šroubů EDF (Expandable Diameter Fasteners) – ty drží LEE na správném místě. Astronauti povolí dvojici šroubů ještě předtím, než se LEE otočí, aby měli dobrý přístup ke zbývajícím čtyřem. Po otočení ramene a před uvolněním čtyř zbývajících EDF bude ovládání paže vypnuté a manipulační zařízení se připojí k LEE.

Zdroj: http://www.fastenerdimensions.com
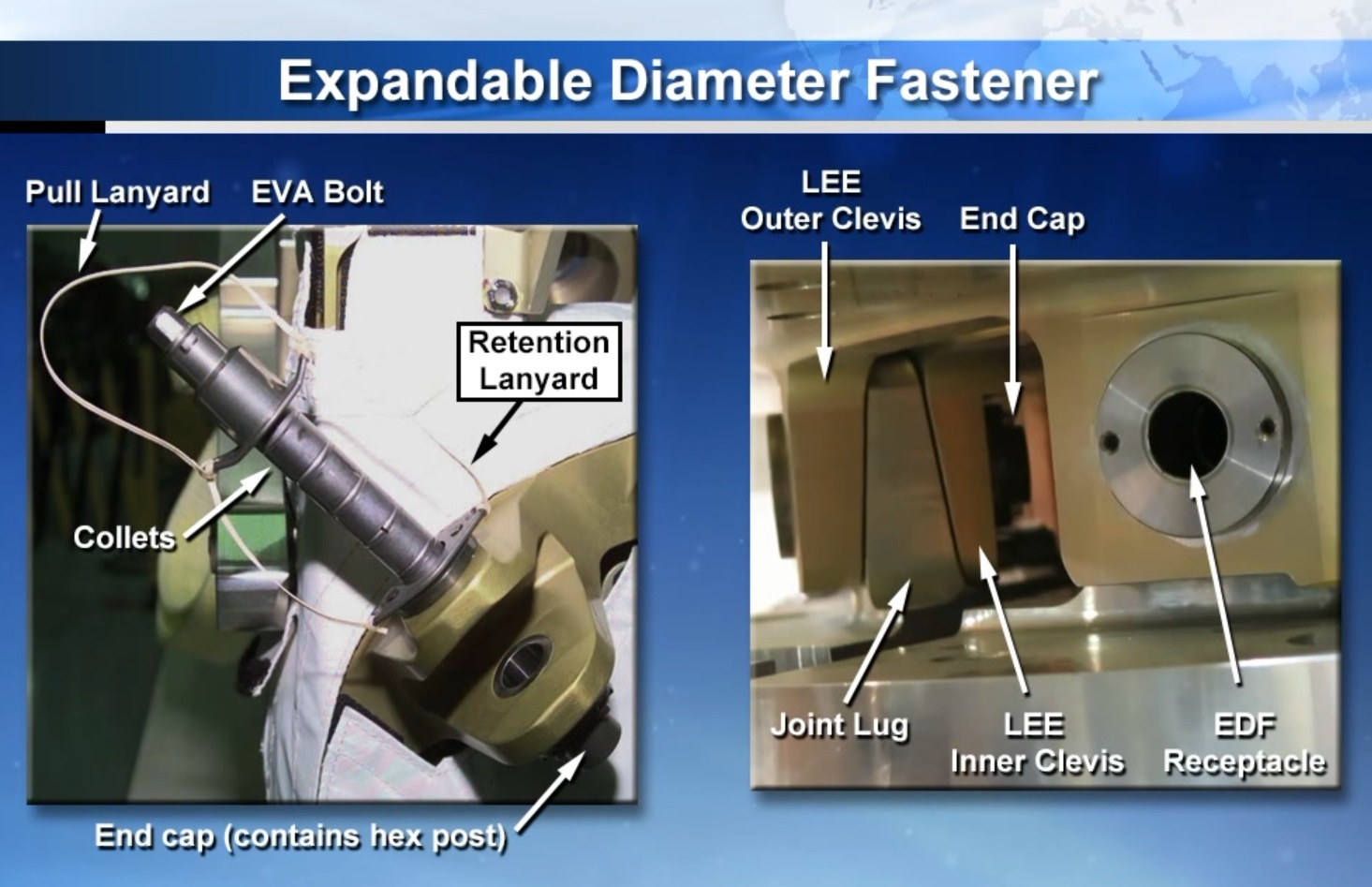
Právě šrouby EDF jsou jedním z potenciálně složitých bodů při tomto výstupu. Jejich použití na SSRMS a záchytných bodech bylo zvoleno tím, že dobře odolávají vysoké zátěži. EDF jsou připojeny k LEE a prochází spojem LEE-kloub, kde se připojují k rozhraní. Uvnitř tyto šrouby zacvaknou do koncového víčka se šestihrannou tyčí, do které se dá šroub zatočit. Při utahování přenosnou vrtačkou Pistol Grip Tool se délka EDF zkrátí a vnější materiál je natlačen ven, čímž vytvoří značné tření zajišťující vysokou pevnost a nulovou vůli.
Díky dosavadním zkušenostem s EDF mají jak astronauti, tak hlavně pozemní týmy připravené mnohostránkové „taháky“ s popisem procedur v rámci řešení očekávatelných problémů jako je třeba chybějící zajišťovací lanko, neschopnost dosáhnout potřebné kroutící síly, neuvolnění šroubu z rozhraní ani po očekávaném počtu otočení.
Zdroj: http://spaceflight101.com/
Když bude vyjmuto všech šest EDF, může být odpojený LEE-A odstraněn a dočasně uložen na vozíku CETA (Crew Equipment Translation Aid). Náhradní díl začal svou „kariéru“ jako POA LEE (Payload/Orbital Replacement Unit Accommodations) – dočasná platforma pro náklady a palety vybavené záchytným bodem – například pro externí palety lodi HTV. Jelikož se používá jen velmi zřídka, může být použit jako náhradní díl pro Canadarm 2.
U POA začnou astronauti opět s povolováním šesti šroubů EDF, čímž oddělí LEE a následně jej přesunou k robotické paži. Tady na ně bude čekat kontrola elektrických konektorů – jak na LEE, tak i na kloubu paže. Pak budou moci přistoupit ke spojení obou částí. Nejprve utáhnou čtyři EDF na počáteční úroveň kroutivé síly, načež dojde k aktivaci robotického ramene. To se otočí, aby měli astronauti přístup ke zbývajícím dvěma EDF. Po jejich instalaci bude následovat dotažení všech EDF na finální úroveň.
Zdroj: http://spaceflight101.com
Zbytek už bude relativně jednoduchý – pořídit sérii fotografií pro pozemní techniky a pak umístit zpátky dvojici krycích vrstev. Následně bude moci začít série diagnostických úkonů, které ověří stav ramene. V jejich rámci se bude sledovat, zda LEE pracuje tak, jak má, zatímco astronauti budou přesouvat odstraněný LEE na POA, kde jej připojí opět šesti šrouby EDF. Posledním krokem bude odstranění podpory pro nohy a kontrola, zda mají všechno nářadí, které s sebou nesli ven. Pokud bude vše v pořádku, vrátí se zpět do přechodové komory.

Zdroj: http://spaceflight101.com
Tolik tedy zítřejší výstup, ale na závěr článku se ještě podíváme na další kosmické procházky. Zatímco při prvním výstupu se astronauti zaměří na jediný úkol, při druhé procházce bude na stejnou dvojici (Bresnik – Vande Hei) čekat několik úkolů. Jedním z nich je otočení náhradního zařízení Pump Flow Control Subassembly na modulu Destiny, aby mohl být při příštím výstupu odvzdušněn. Dalším úkolem bude výměna několika kamer na kamerovém bodě číslo 9 ve spodní části příhradové konstrukce. Kromě toho budou promazávat centrální kulový šroub nově instalovaného LEE-A, vymění čočku na kameře na mobilním transportéru a na modulu Tranquility odstraní dvojici zábradlí.

Zdroj: http://spaceflight101.com
Třetí výstup bude následovat 18. října a k Randolphu Bresnikovi se přidá Joe Acaba, který má zatím za sebou dva výstupy do volného prostoru. Úkoly jejich výstupu budou hodně záležet na tom, co se podaří a nepodaří udělat při předchozích dvou výstupech. Acaba by měl nainstalovat novou HD kameru na port číslo 3 a vyměnit sestavu kamer na bodu 13. Bresnik vymění elektrickou pojistku na manipulátoru Dextre a odstraní kryt z náhradního dílu elektrického systému Main Bus Switching Unit kvůli budoucí robotické operaci. Bresnik pak odstraní kryt i z náhradního dílu Direct Current Switching Unit a Acaba promaže čtveřici západkových šroubů na LEE-A, osm lineárních ložiskových kolejí a vyrovnávací válečky.
Poškozený LEE-A by se v budoucnu mohl vrátit na Zemi na palubě lodi Dragon. Po kontrole a opravě by mohl být znovu vynesen do vesmíru. Díky tomu by mohly pozemní týmy získat velmi cenné údaje o tom, jak je technika ovlivněna několikaletým používáním ve vesmíru. Dalo by se zjistit, které části trpí nejvíce i to, jak tyto systémy do budoucna lépe chránit, nebo se jen zjistí, že je potřeba pohyblivé díly častěji mazat. Na ISS se momentálně nachází ještě jeden náhradní LEE. V roce 2009 jej sem doručil raketoplán v rámci mise STS-129 a na Zemi se již připravuje další náhradní díl, který se již brzy dostane na stanici.
Zdroje informací:
http://spaceflight101.com/
http://forum.nasaspaceflight.com/
Zdroje obrázků:
http://spaceflight101.com/…/uploads/sites/37/2017/10/16665192624_6918fd96aa_b.jpg
https://upload.wikimedia.org/wikipedia/commons/c/cf/Canadarm2-lee.jpg
http://spaceflight101.com/iss/wp-content/uploads/sites/37/2017/10/canadarm2-schematic.jpg
https://upload.wikimedia.org/wikipedia/commons/9/97/Latching_End_Effector_picture.jpg
https://upload.wikimedia.org/wikipedia/commons/7/7d/Rassvet_Canadarm_Crop.jpg
http://spaceflight101.com/iss-expedition-45/wp-content/uploads/sites/37/2017/01/45EVA-4.jpg
https://upload.wikimedia.org/…atching_End_Effector_%28ISS049-E-004178%29.jpg
https://upload.wikimedia.org/wikipedia/commons/c/c1/LEE.png
http://spaceflight101.com/iss/wp-content/uploads/sites/37/2017/10/eva44-personnel1.jpg
http://www.fastenerdimensions.com/sites/fastenerdimensions.com/files/expandable.jpg
http://spaceflight101.com/iss/wp-content/uploads/sites/37/2017/10/eva44-doug1.jpg
http://spaceflight101.com/iss/wp-content/uploads/sites/37/2017/10/lee-edfs1.jpg
http://spaceflight101.com/iss/wp-content/uploads/sites/37/2017/10/DK_qzIdW0AAqyjh.jpg
http://spaceflight101.com/iss/wp-content/uploads/sites/37/2017/10/DK_qwcNXkAQEBnR.jpg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jak ho dají do Dragona? Tedy spíše jak hi dostanou do ISS? Není na to moc velký?
Podle vizualizace má zhruba metr na délku a o trochu méně v průměru. Do přechodové komory se vejde bez problémů, když se tam jinak musí vejít dva astronauti. Kdyby se tam nevešel i s nimi, měl by se tam dát dopravit pomocí opravené robotické paže.
Píšou, že na délku má něco přes metr, v průměru odhadem tak půl metru. To by se mohlo do ISS i Dragona nějak nacpat.
„dále jsou zde dvě dvojice tří rotačních kloubů“
Buď jsem po ránu gogo, nebo jste se vám včerejší 3-2-1 zalíbilo příliš. 🙂
Z obrázku bych řekl, že to jsou dvě trojice rotačních kloubů, každá na jednom konci ramene.
Je to tak, opraveno. 😉
Ja som cakal pomerne suche oznamenie o tom, ze ono sa nieco bude opravovat a ze z toho bude NASA vysielat live stream a on je to velmi zaujimavy clanok. Vedel som, ze roboticka ruka vie behat na voziku po priehradovej konstrukcii, ale napriklad som nevedel, ze sa vie „plazit“ po kotviacich bodoch kade tade po povrchu stanice. To je velmi sikovne riesenie! Dik za clanok!
To mám radost, že se Vám článek líbil. 😉
Vpodstatě je to velká robotická píďalka 🙂
Mám otázku: kudy do toho jde elektřina (pro motory atd…), když se oba koce odpojují od stanice ?
Předpokládám, že úchopopvé body na stanici mají v sobě napájení právě pro tento účel ?
qa.
Vždy je jeden konec připojený ke stanici. Konektory v tomto místě na LEE se vždy připojí ke staniční datové a elektrické síti.
Hmmm,robotická ruka tedy. A kde je zbytek robota? 🙂