
Pokaždé když na našem blogu rozjíždíme nový seriál, zažíváme při jeho premiéře velkou trému, jak bude našimi čtenáři přijat. Čím rozsáhlejší daný projekt je, tím je pochopitelně tréma větší. Stejné pocity nás provázely i u rozjezdu seriálu Pohled pod kůži, ale jak první, tak i druhý díl, které se věnovaly sondě Trace Gas Orbiter, měly skvělé ohlasy, za které Vám děkujeme. Dnes Vám tedy přinášíme díl s pořadovým číslem tři a jeho náplní bude rozbor základní konstrukce zařízení EDM, které letí k Marsu společně se sondou TGO. V příštím díle se pak můžete těšit na vědecké přístroje na palubě EDM.
Ačkoliv je toto zařízení známé spíše jako Schiaparelli, jeho oficiální název zní Entry, Descent and Landing Demonstrator Module (EDM), což by se dalo přeložit jako modul demonstrující vstup do atmosféry, zpomalení a přistání. Už samotný název tedy přesně zachycuje účel tohoto zařízení – má otestovat technologie nutné k bezpečnému vstupu do atmosféry a k měkkému, motoricky řízenému, přistání na Marsu. Tyto údaje se budou hodit až se v příští vlně (dříve se uvažovalo o roce 2018, nyní spíše 2020) pošle k Marsu evropské vozítko, o jehož přistání se postará ruská plošina.

Zdroj: https://upload.wikimedia.org/
Neoficiální název Schiaparelli je odvozen od jména italského astronoma Giovanni Schiaparelliho (1835 – 1910), který studoval Sluneční soustavu a jako první zjistil, že meteorické roje Leonidy a Perseidy mají původ v kometách. Kromě toho vytvářel názvosloví pro útvary na povrchu Marsu a roku 1877 oznámil, že na rudé planetě objevil dva dlouhé útvary, kterým dal jméno canali. Až později se ukázalo, že šlo jen o chybu optiky, ale mezi lidmi už kolovala nesprávná představa, že na Marsu jsou uměle vytvořené kanály.
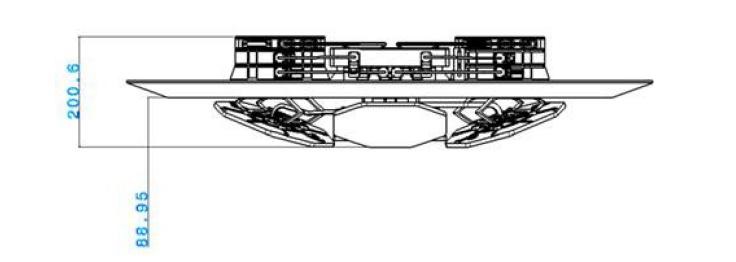
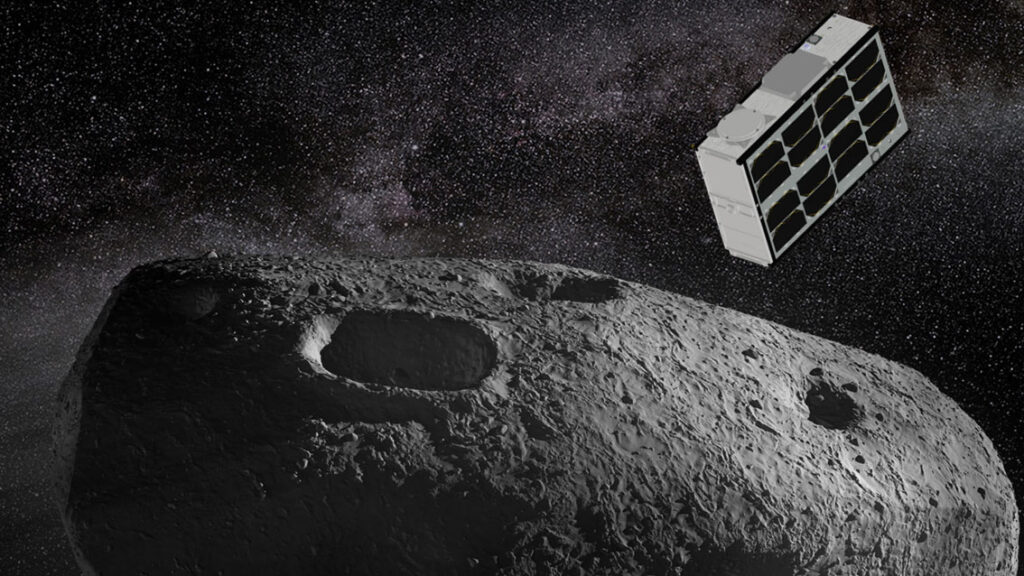
Samotné pouzdro EDM letí k Marsu pevně spojené se sondou TGO. Během sedmiměsíční přeletové fáze bude EDM spojena se sondou nejen mechanicky, ale bude využívat i jejích elektrických a datových systémů. O spojení obou částí se stará oddělovací mechanismus, který je pevně připojen k centrálnímu válci vnitřní konstrukce sondy (viz první díl našeho seriálu). Tři dny před příletem k Marsu se EDM oddělí a zatímco TGO zažehne svůj motor a vstoupí na oběžnou dráhu, EDM nebržděně vletí do atmosféry a pokusí se o měkké přistání v oblasti Meridiani Planum.

Zdroj: https://scontent-fra3-1.xx.fbcdn.net
Na palubě modulu najdeme malé množství vědeckých přístrojů – senzory studující okolní prostředí, počasí v místě přistání a kameru monitorující sestup. Senzory budou kromě jiného zaznamenávat data o průchodu atmosférou i chování modulu v různých podmínkách. Těmto přístrojům se ale budeme věnovat v příštím díle našeho seriálu. EDM disponuje pouze bateriemi, které se po oddělení od TGO nedají dobíjet, takže se očekává, že modul bude na povrchu Marsu fungovat zhruba po dobu 4 dní.
Zdroj: spaceflight101.com
Delší fungování jednak není z vědeckého hlediska potřebné, protože hlavním úkolem je otestovat přistání a navíc by bylo potřeba použít další systémy – modul by těžknul a jeho stavba by se prodražovala. Původní plány ale vypadaly jinak. Na palubě Schiaparelli měla být sada Humboldt s jedenácti senzory. Modul měl být napájen radioizotopovým generátorem, který by zajistil fungování po dobu jednoho roku. V roce 2009 ale došlo k přepracování projektu a sada Humboldt byla z návrhu vyřazena.
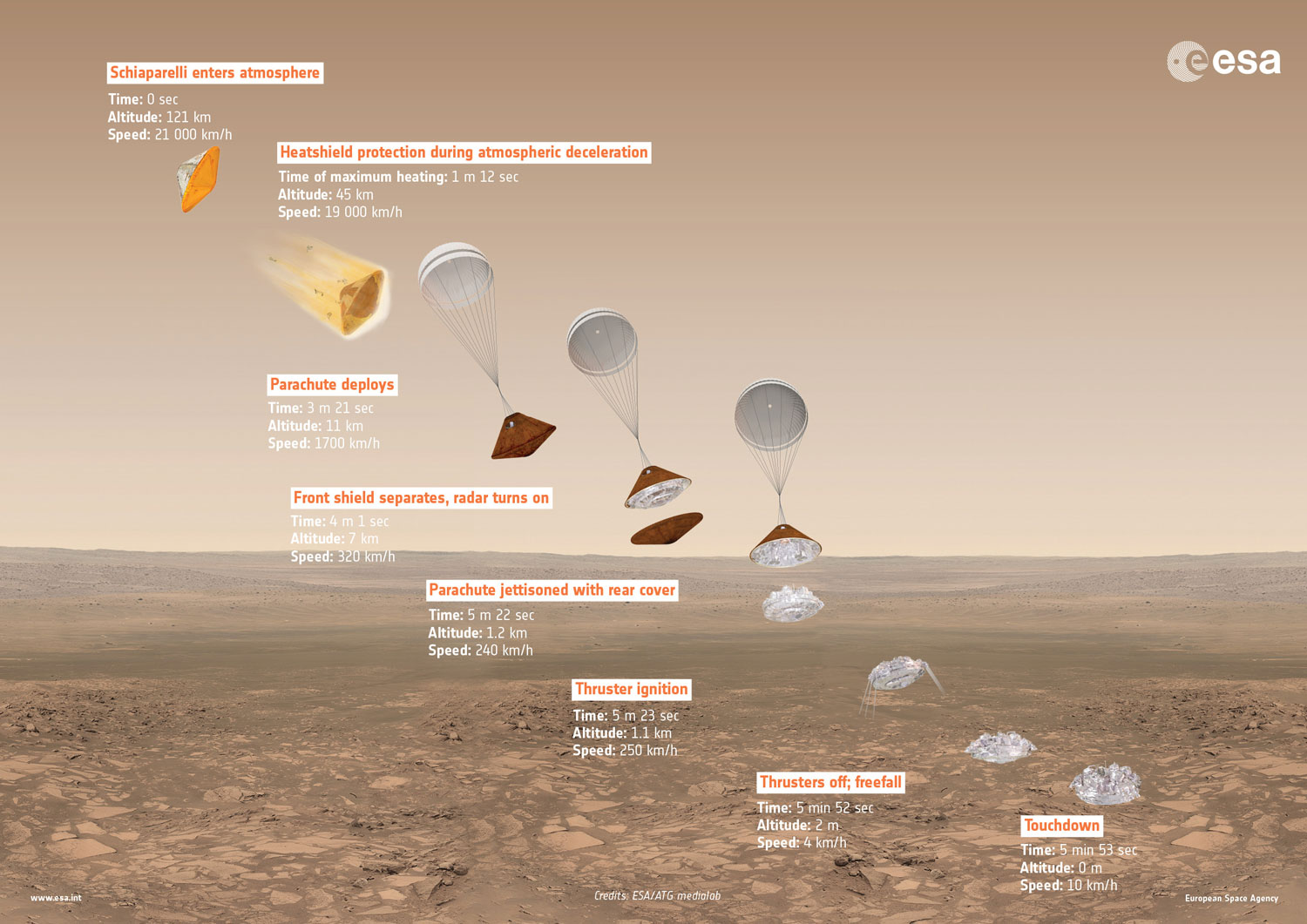
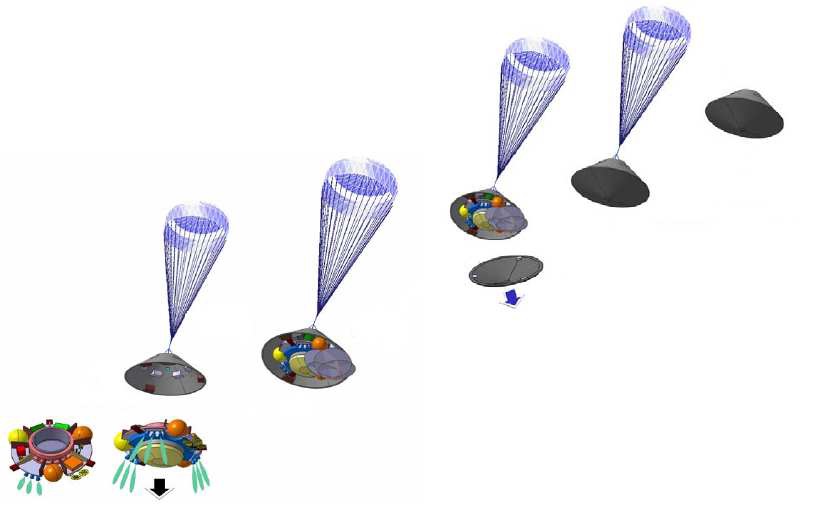
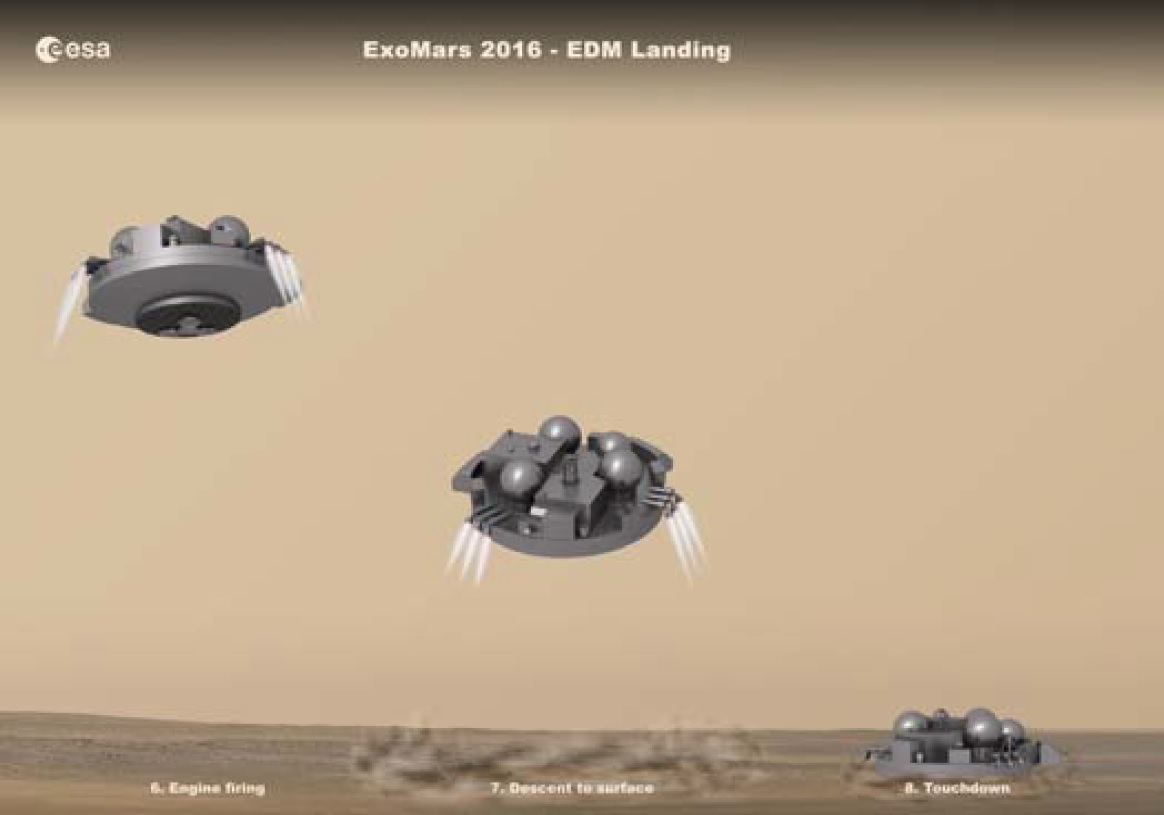
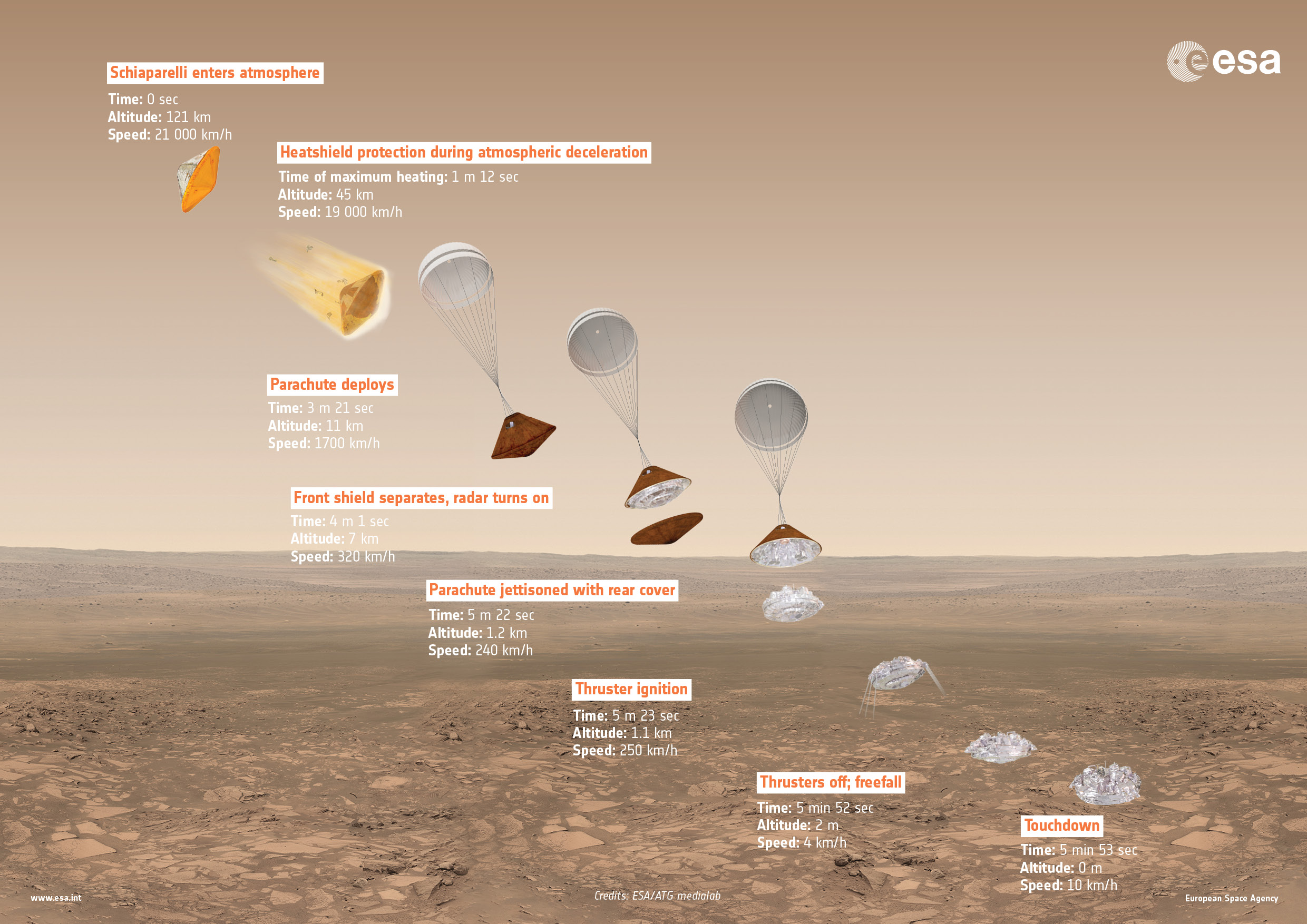
Nejprve přijde ke slovu tepelný štít, který zajistí, aby modul při vstupu do atmosféry neshořel. Právě tepelný štít se postará o nejvýraznější zpomalení a senzory budou přitom měřit teplotu a tlak, kterým bude konstrukce vystavena. Dalším krokem bude vystřelení padáku o průměru 12 metrů, který dále zpomalí sestavu předtím, než dojde k finální fázi – motorickému přistávání. S pomocí radarového výškoměru a inerciální měřící jednotky budou sestup kontrolovat zážehy malých trysek na kapalné palivo. Modul se dostane zhruba do výšky jednoho metru nad povrchem, kde vypne své motory a zbývající metr EDM absolvuje volným pádem. V návrhu se s tím počítá a v konstrukci najdeme „deformační zónu“, která absorbuje energii nárazu.
Konstrukce landeru

Zdroj: spaceflight101.com
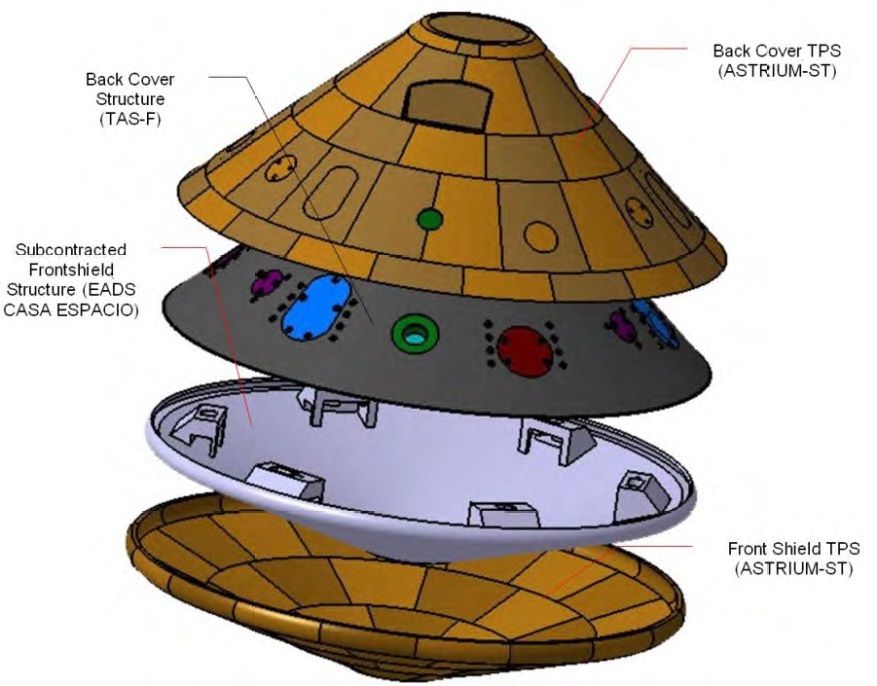
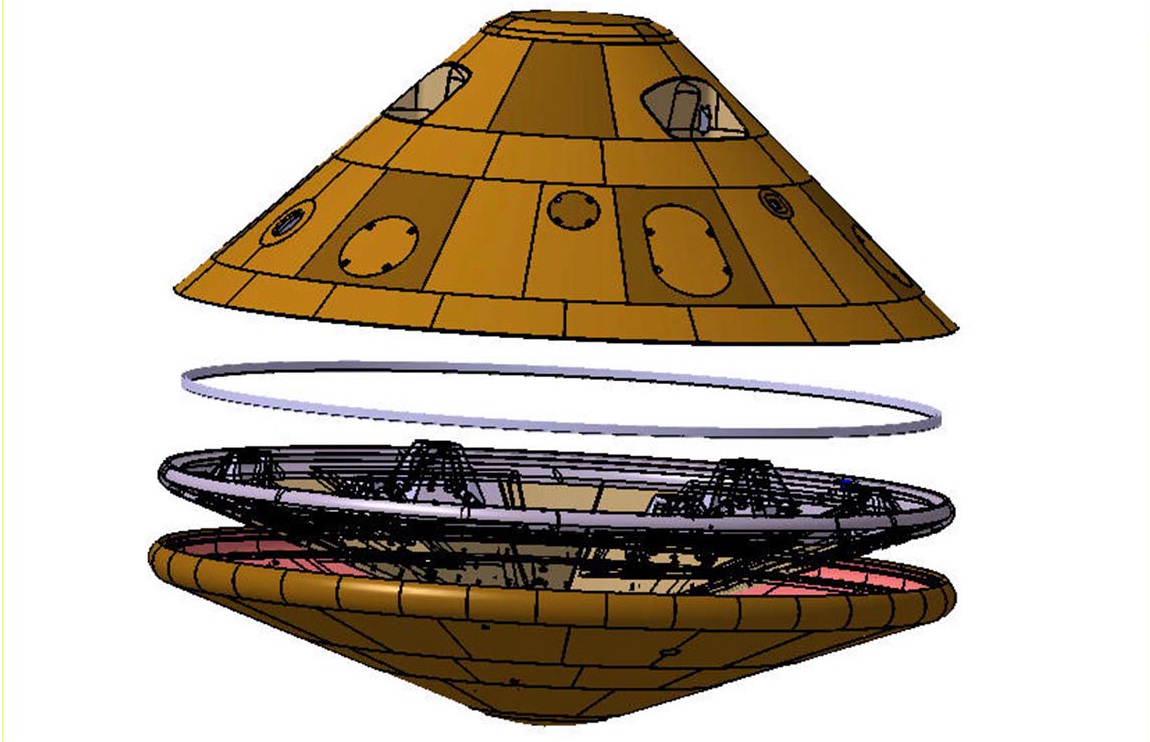
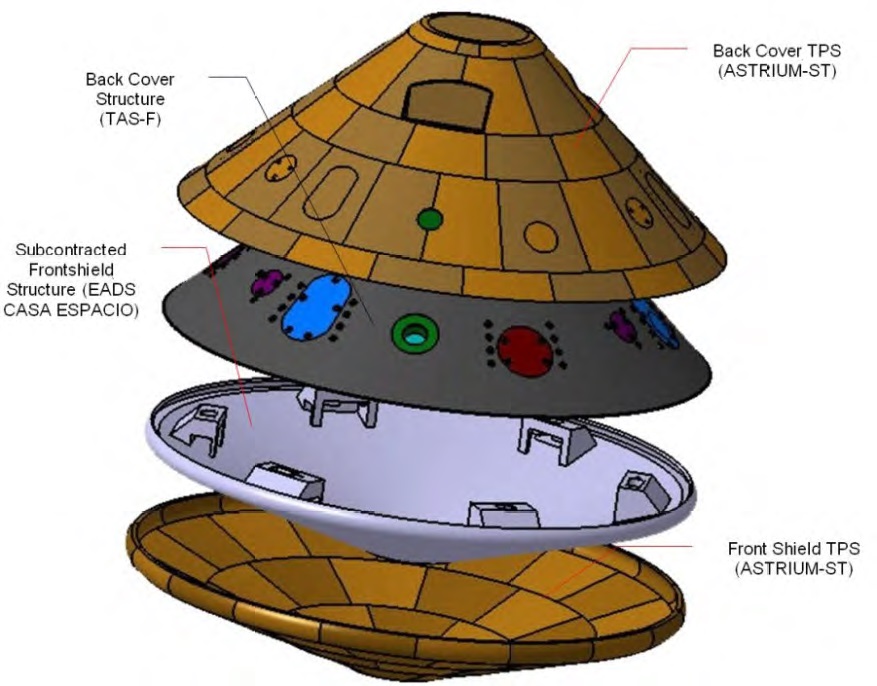
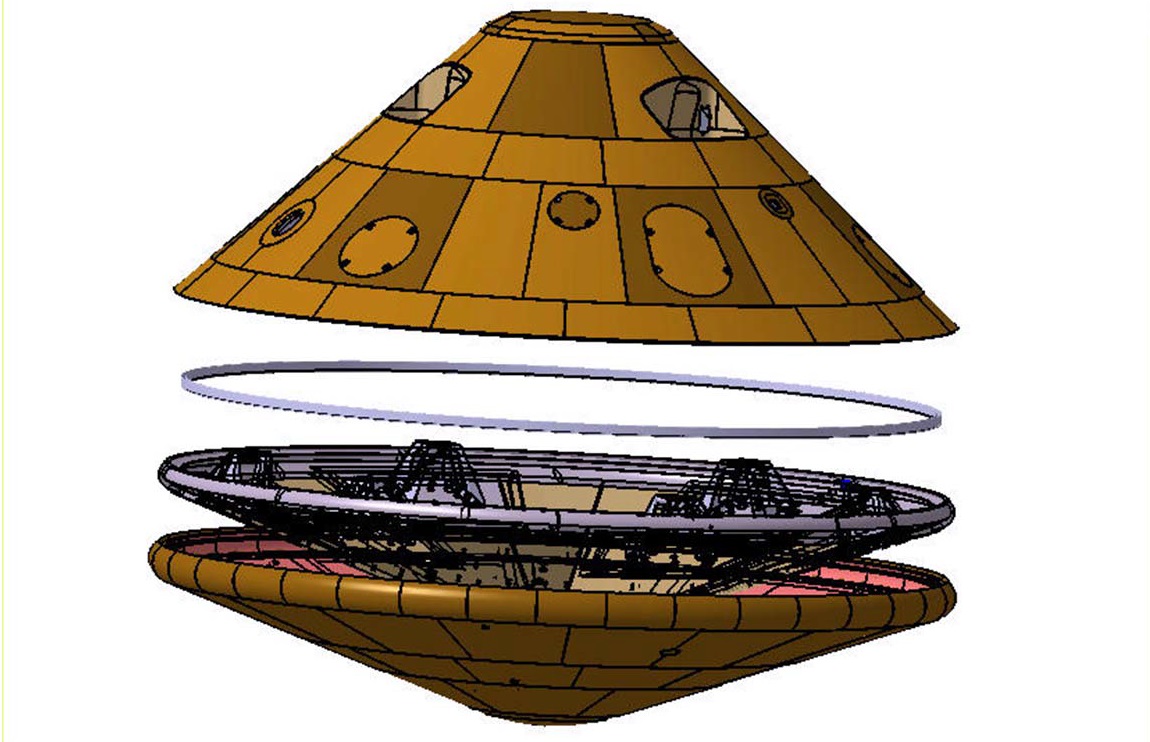
Samotný modul EDM je postaven na základě odkazu minulých plánů, které se rozvíjely v rámci různých fází programu ExoMars. Konstrukci modulu můžeme rozdělit do tří základních částí – povrchová platforma (Surface platform), zadní štít (Back shield) a přední štít (Front shield). Schiaparelli má průměr 2,4 metru a na výšku měří 1,8 metru. Celková hmotnost je 600 kilogramů a tvar můžeme definovat jako komolý kužel s úhlem předního štítu 70° a s úhlem 47° u štítu zadního.
Během přeletu k Marsu budou baterie EDM udržovány stále v plně nabitém stavu, jelikož (jak už bylo uvedeno) bude modul spojen elektrickými spojkami se sondou TGO. Stejně tak budou datové linky zajišťovat přenos údajů ze systémů na palubě modulu do mateřské sondy, která se postará o jejich zpracování a odeslání. Oddělovací mechanismus je tříbodový rotační a má modul uvést do pomalé rotace s 2,5 otáčkami / minutu.

Zdroj: spaceflight101.com
Tato rotace zajistí stabilizaci EDM během třídenního přeletu k atmosféře rudé planety. Modely počítají s tím, že se bude EDM od TGO vzdalovat rychlostí 30 centimetrů / sekundu. Téměř ihned po oddělení od sondy TGO budou palubní přístroje uvedeny do stavu hibernace, která má minimalizovat množství použité energie. Tato hibernace skončí hodinu před vstupem do atmosféry, aby měl modul dostatek času srovnat svou polohu podle senzoru, který sleduje Slunce.
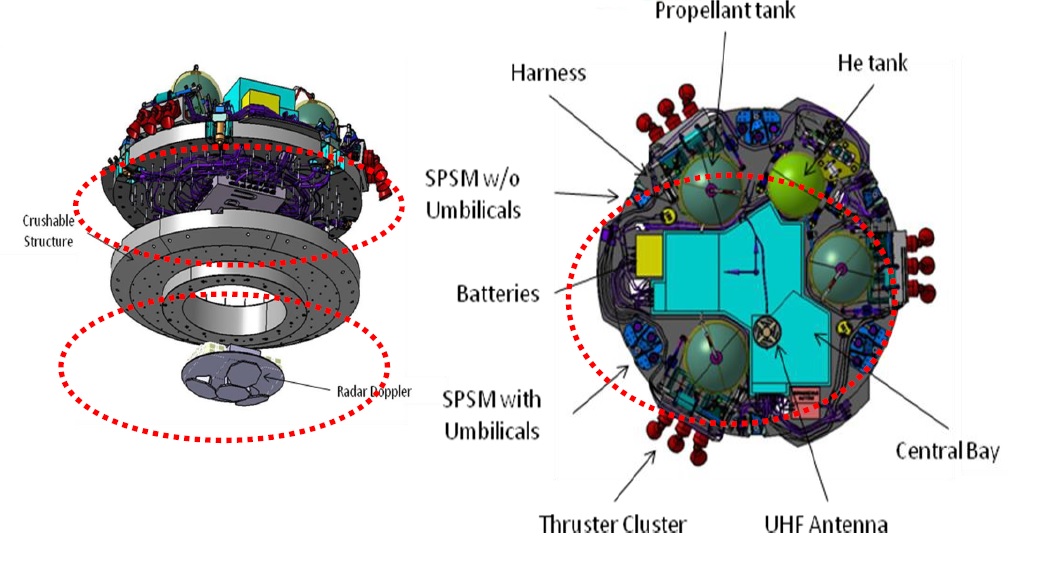
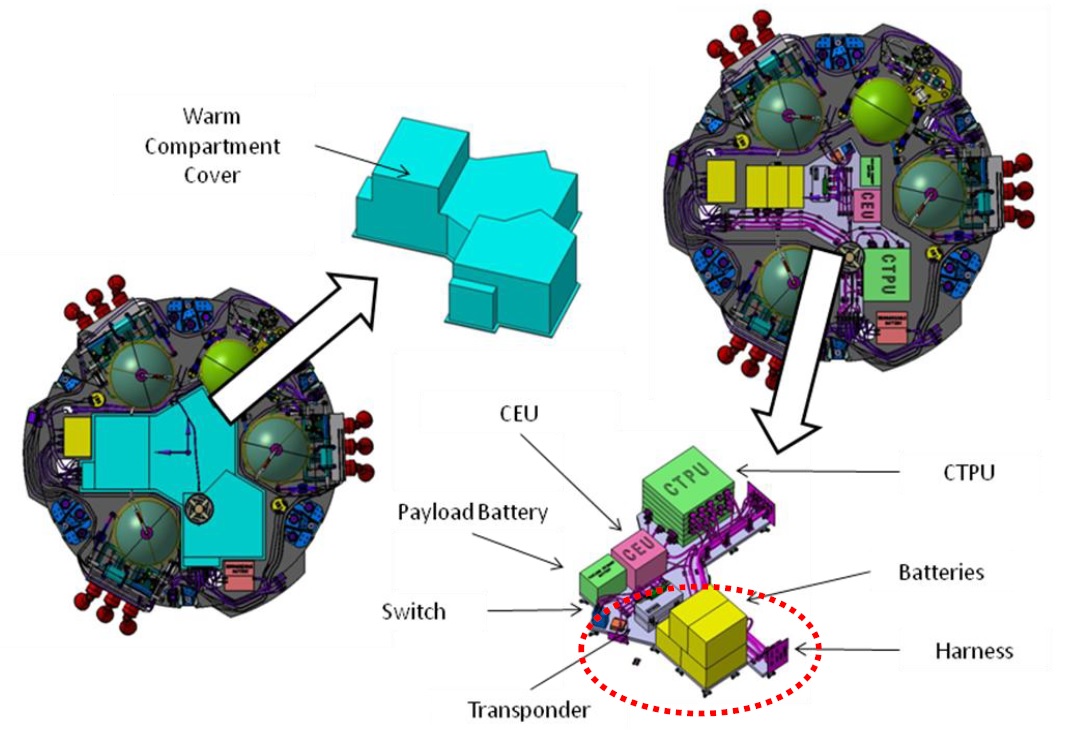
Samotná kostra EDM je vytvořena sendvičovou metodou, kdy je hliníkový nosník zpevněn polymerovou vrstvou z uhlíkových vláken. Samotná povrchová platforma váží 300 kilogramů a na její spodní části nalezneme deformovatelnou strukturu, která zajistí měkké dosednutí. Zatímco přístroje a systémy, které jsou potřebné pouze pro sestupnou a přistávací fázi, jsou volně vystavené okolnímu prostředí, EDM disponuje i teplým oddělením, kde jsou uloženy přístroje, které mají fungovat i po přistání a potřebují zachovat provozní teplotu. Na povrchové platformě najdeme pohonný systém, centrální energetickou jednotku (Central Terminal Power Unit), baterie a tři kilogramy povrchového vybavení.
Zdroj: spaceflight101.com
Zdroj: spaceflight101.com
Deformační zóna na spodní části modulu má za úkol pohltit energii nárazu při dopadu modulu. Očekává se, že dojde k dopadu při rychlosti 4 m/s a deformační zóna zajistí, že na palubní přístroje nebude působit velké přetížení. Při výběru konstrukce se zvažovalo více možností. Pasivní deformační zóna nakonec vyhrála kvůli své snadné konstrukci – airbagy by se musely nafukovat a při této operaci se může něco pokazit, což platí i pro použití nebeského jeřábu, který dopravil na povrch Marsu vozítko Curiosity.
Deformační zóna má i další výhody oproti přistáním na airbagu. Pokud by na EDM byl rover, mohl by sjet přímo na povrch Marsu aniž by potřeboval rozkládat nějaké sjezdové rampy a podobně.
Tepelný štít
Zdroj: spaceflight101.com/
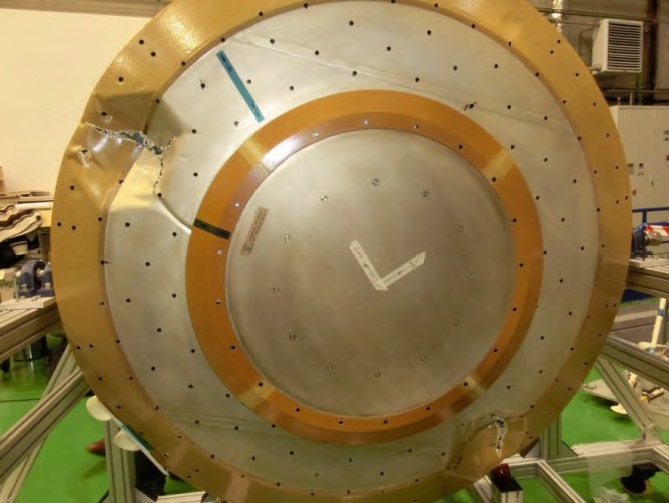
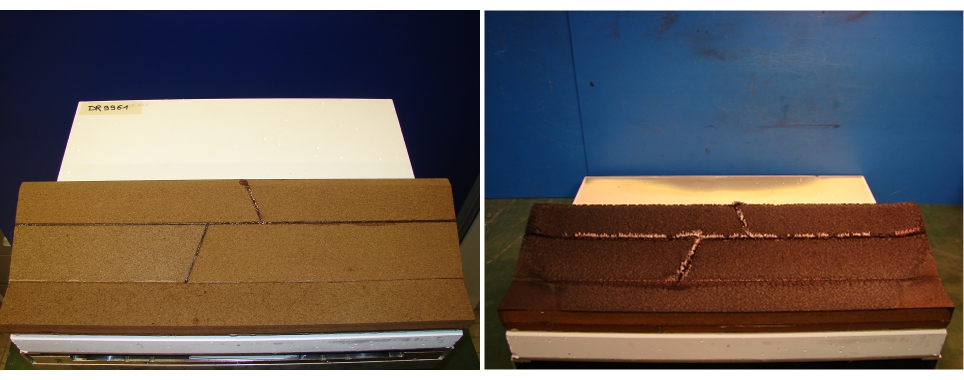
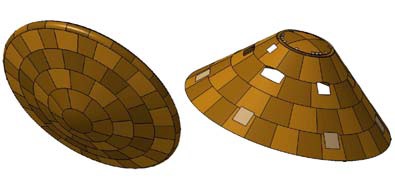
Tepelný štít na EDM je rozdělen na dvě části – kompozitní struktura předního štítu (composite Frontshield Structure) a systém tepelné ochrany předního štítu (Front Shield Thermal Protection System), který je umístěný na vlastní struktuře. Systém tepelné ochrany (Thermal Protection System) využívá materiál Norcoat-Lige jako tepelný štít. Jedná se o materiál, který pochází už z dob projektů ARD, Beagle-2, nebo Netlander. Celý přední štít (Front Shield) váží 80 kilogramů.
Struktura předního štítu sestává z hliníkových komponentů ve tvaru včelích pláství, přičemž hliník je pokryt uhlíkovým polymerem, který konstrukci zesiluje, ale přitom ji udržuje lehkou a schopnou nést materiál tepelné ochrany. Samotný systém tepelné ochrany (Thermal Protection System) se skládá z 90 dlaždic sedmi různých tvarů a tlouštěk. Každá z nich se skládá z materiálu Norcoat-Lige a je s ostatními spojena pomocí silikonového lepidla.

Zdroj: spaceflight101.com/
Norcoat je elastomer skládající se z drceného korku a fenolové pryskyřice, která funguje jako ablator, tedy materiál, který se při zahřátí odpařuje a tím odnáší teplo pryč od štítu. Tloušťka vrstvy je od 8 do 18 milimetrů podle toho, jak je která část tepelného štítu namáhána. I když je přední část štítu rozžhavena na 1750°C, vnitřní teplota stále nepřekročí 170°C, přičemž při použití dalších izolačních vrstev se dostaneme na velmi slušných 50°C.

Zdroj: spaceflight101.com/
Princip ablativního tepelného štítu je jednoduchý – spočívá ve vytvoření vrstvy, která odděluje samotkou konstrukci štítu od extrémně horké , šokově stlačené vrstvy plynů v atmosféře. Tato vrstva se vytvoří tím, že materiál tepelného štítu pomalu odhořívá a vytvoří přitom plynné sloučeniny. Ty odlétávají pryč od štítu a udržují tak horkou vrstvu stlačené atmosféry v dostatečné vzdálenosti od štítu samotného.
Procesy, které v tepelném štítu probíhají, se nedají stručně charakterizovat – jedná se o soubor jevů od zuhelnatění, přes tavení, sublimaci až po pyrolýzu. Právě tyto jevy vytváří plynné složky, které vytváří vrstvu blokující přístup horkého plasmatu ke štítu. O snížení přenosu tepla pomocí záření se starají uhlíkové sloučeniny, které v hraniční vrstvě vytváří plyny, které jsou opticky průhledné. V tepelném štítu najdeme pět povrchových senzorů, které budou zaznamenávat úbytek ablativní vrstvy, sedm termozástrček, čtyři tlakové senzory a sedm termistorů. Úkolem těchto senzorů je sbírat data o prostředí v okolí štítu i o tom, jak dobře celý systém funguje.
Zadní štít (Back shield)
Zdroj: spaceflight101.com
Zadní štít pouzdra EDM se skládá ze dvou hlavních částí. Prvním z nich je konstrukce tvořená opět „včelími plástvemi“ z hliníku potaženého uhlíkovým polymerem a druhou částí je systém tepelné ochrany, který (stejně jako v případně předního štítu) používá systém Norcoat-Lige. Tato sestava váží okolo 20 kilogramů, přičemž systém tepelné ochrany tvoří 93 dlaždic různých tvarů, které jsou opět spojeny silikonovým lepidlem. I v těchto dlaždicích najdeme snímací senzory – konkrétně tři termozástrčky a tři termistory. Očekává se, že maximální teplota, které bude zadní štít vystaven bude okolo 710°C.
V zadním štítu najdeme také UHF anténu pro přenos telemetrie při průchodu atmosférou, ale také sluneční senzor. Ten je nutný pro správnou orientaci pouzdra před jeho vstupem do atmosféry.
Padák
Zdroj: spaceflight101.com/
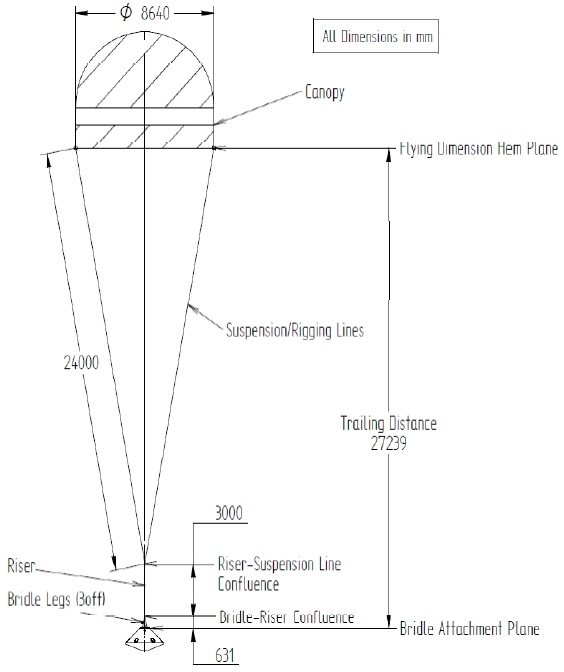
Pouzdro Schiaparelli využije jediného padáku (typ Disk Gap Band), který má stejný design jako ten, který dopravil pouzdro Huygens na povrch saturnova měsíce Titan. Systém padáku se skládá ze tří částí – padáku samotného, zařízení pro jeho vystřelení a krycí vrstva. Padák s průměrem 12 metrů bude vystřelen pomocí pyrotechnické roznětky, která vyhodí rychlostí 30 m/s sbalený padák ven. O rozbalení se pak postará padák sám tím, jak je složený a jak má uložené šňůry.
Vrchních část pyrotechnické slože, která zajistí vystřelení padáku, je hliníková krytka, která zajistí tepelnou ochranu při průchodu atmosférou. Po aktivaci roznětky dojde ke zničení nýtů, které drží záslepku na místě. Hliníková krytka bude hned vzápětí vystřelena ven společně s padákem. Samotná krytka disponuje vlastním padákem o průměru 1,6 metru, aby bylo vyloučeno, že přijde do kontaktu s celou sestavou.
Hlavní padák zvládne pracovat při rychlostech až Mach 2,1 a vrchlík se otevře 27,2 metru nad pouzdrem. Tato délka byla zvolena kvůli správné aerodynamice cleé sestavy a minimalizaci turbulencí. Nosný popruh mezi vrchlíkem a nosnými lany měří na délku 3 metry a poutací šňůry jsou dlouhé 24 metrů.
Zdroj: spaceflight101.com/
Řízení, navigace a kontrola
Lander EDM používá kombinaci různých senzorů, které poskytují informace nutné ke kompletnímu průchodu atmosférou. Primární řídící senzory jsou akcelerometry, inerciální měřící jednotka (Inertial Measurement Unit – IMU) a radarový výškoměr, který přijde ke slovu v poslední fázi sestupu. Dvojice slunečních senzorů se používá pro sběr dat,která využije řídící jednotka k tomu, aby si uvědomila svou polohu, což je nutný krok před vstupem do atmosféry.

Zdroj: spaceflight101.com
Na palubě EDM najdeme z redundantních důvodů dvojici měřících jednotek. LN-200 je měřící jednotka používající gyro technologii založenou na optických vláknech. V útrobách LN-200 najdeme tři gyroskopy založené na optických vláknech a tři akcelerometry obsahující křemíkový mikro elektro-mechanický systém, který zajišťuje měření zrychlení a náklonu s velkou přesností. Digitální výstup z jednotek IMU obsahuje údaje o rychlosti a náklonu, přičemž data putují po lince RS-485 do navigačního systému GNS.
Jednotka LN-200 má průměr 8,9 centimetru, je vysoká 8,5 centimetru a váží 750 gramů. Dokáže pracovat v širokém spektru teplot a je odolná vůči kosmickému záření. Kromě dat z jednotek IMU má řídící systém k dispozici i dodatečné údaje ze šesti akcelerometrů. Řídící systém rozhoduje o vhodném okamžiku pro vystřelení padáku – rozhodující jsou pro něj údaje k zrychlení celé sestavy. Pomocí algoritmu čeká na podmínky, kdy bude zajištěno, že se padák bezpečně otevře a nebude poškozen dynamickým namáháním v atmosféře.

Zdroj: spaceflight101.com
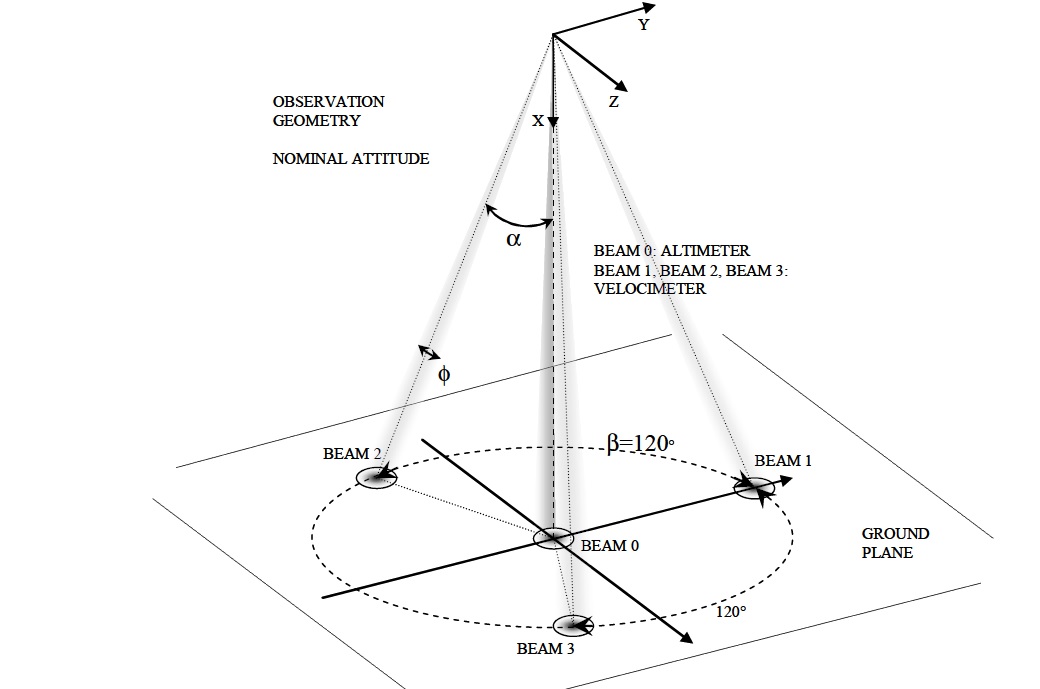
Radarový výškoměr je v podstatě radar pracující v pásmu Ka. Vysílá nemodulované pulsy směrem k povrchu a zachytává „ozvěny“ odražené od povrchu. Časový rozdíl mezi vysláním signálu a jeho přijetím je po započtení Dopplerova jevu využit ke stanovení výšky sestavy nad povrchem. Výškoměr obsahuje čtveřici antén, které jsou propojené, aby mohlo přijímání a vysílání signálů probíhat téměř nepřetržitě. Zatímco jedna anténa míří přímo pod modul a měří odrazy od terénu za účelem zjištění vzdálenosti, zbylé tři mají za úkol měřit rychlost sestupu. Jejich signály nemíří přímo pod modul, ale jsou lehce nakloněné, což je pro měření rychlosti vhodnější.
Zdroj: spaceflight101.com
Signály z antén jsou převedeny přes převodník z analogové formy na digitální, načež jsou zpracovány pomocí programovatelného hradlového pole Field Programmable Gate Array a zpracovávacího modulu LEON-FT. Ten z dat vyseparuje informace nutné pro řízení stroje a pošle je do řídícího systému. Celý radar váží 12 kilogramů a při své krátké službě vyžaduje 35W elektrické energie.
Zdroj: spaceflight101.com
Najdeme jej na spodní straně destrukční zóny a již teď je jisté, že tento přístroj nepřežije náraz na povrch Marsu. Jeho služba skončí ve chvíli, kdy EDM vypne své motory – pak už nebude potřeba. Řídící systém modulu pracuje s výškovou odchylkou maximálně 70 centimetrů a rychlostní vertikální odchylkou maximálně 0,5 m/s a rychlostní horizontální odchylkou maximálně 1,05 m/s. Co se týče úhlové orientace, tam se pracuje s odchylkou maximálně 5 stupňů. Při průchodu atmosférou bude EDM spoléhat pouze na své vnitřní senzory, protože radar bude v té době nepoužitelný – ke slovu se dostane až po odhození tepelného štítu.

Zdroj: spaceflight101.com
Pohonný systém
Zdroj: spaceflight101.com
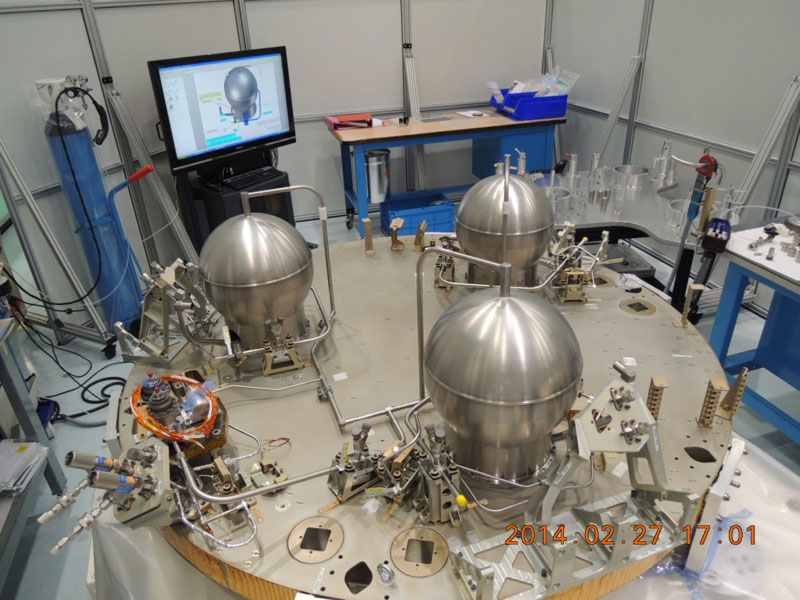
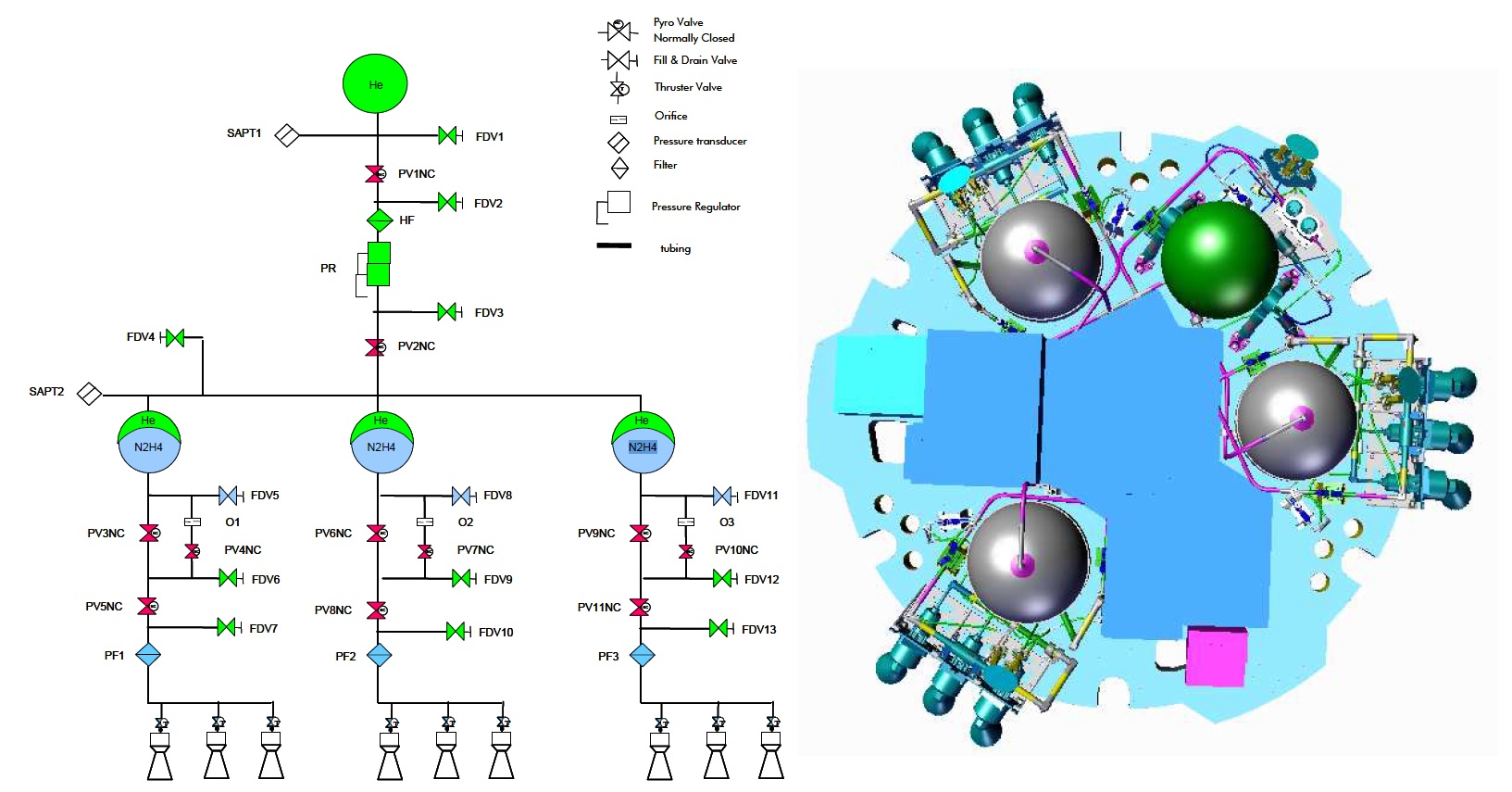
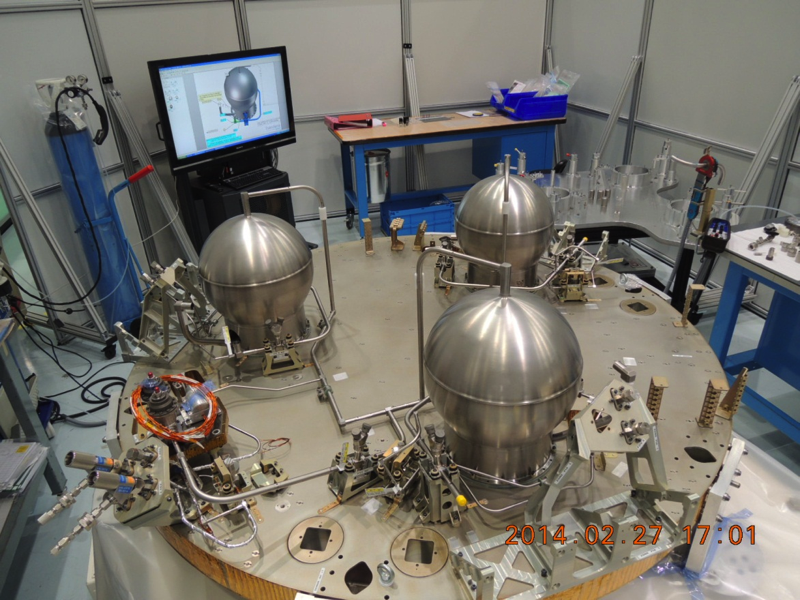
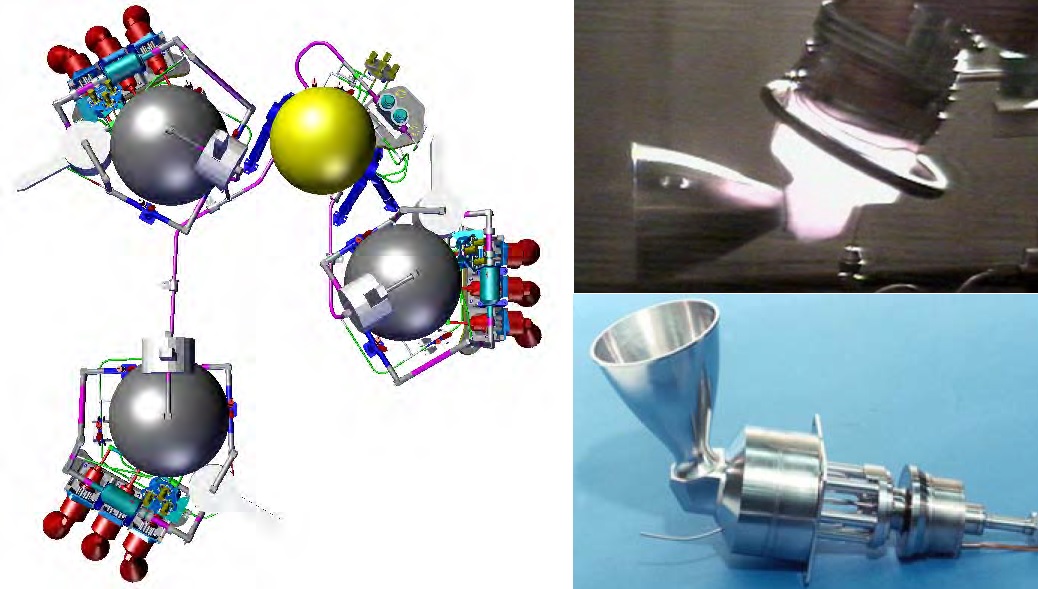
Pohonná jednotka bude aktivována ve chvíli, kdy se povrchová platforma oddělí od zadního štítu s padákem. Přistávací zážeh provede devět trysek, které použijí jako palivo hydrazin. K zážehu dojde ve výšce 1200 metrů nad povrchem a hoření má trvat zhruba 30 sekund. Pohonný systém se skládá z běžného tlakovacího systému a tří oddělených pohonných okruhů, přičemž každý z nich má vlastní palivovou nádrž a sestavu trysek. Za nádrží s heliem najdeme tlakový senzor a ventil, který umožňuje, aby se do nádrže dostalo helium s vysokým tlakem.
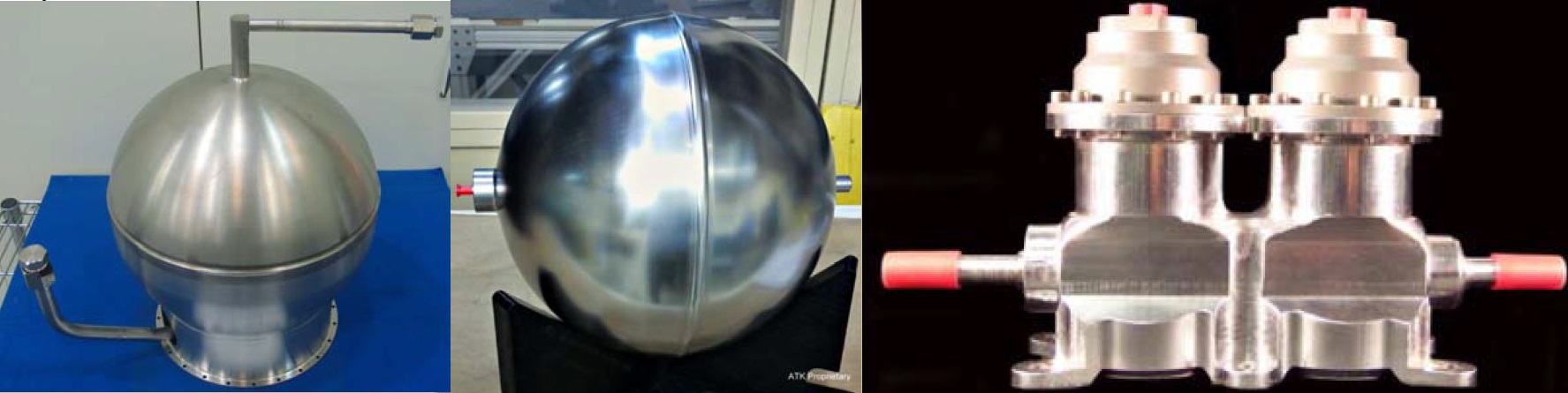
Potrubí s tlakovým heliem obsahuje pyrotechnický izolační ventil, dvoustupňový regulátor tlaku a další pyrotechnický ventil, který se otevře krátce před zážehem, aby došlo k natlakování systému. Vedení tlakovacího helia se dále větví do tří okruhů, z nichž každý ústí do jedné kulové nádrže s hydrazinem. Každá nádrž obsahuje 15,4 kilogramu této kapaliny.

Zdroj: spaceflight101.com
Z každé nádrže je hydrazinem zásobován jeden svazek tři trysek se dvěma pyrotechnickými ventily a filtrem, který se nachází mezi nádrží a tryskami samotnými. Každá tryska má přitom vlastní izolační ventil. Centrální tryska každého svazku míří přímo dolů, zatímco krajní trysky jsou lehce otočeny směrem ven. Cílem je omezit situaci, kdy zplodiny naráží do terénu a zároveň toto řešení umožňuje ovládat průběh sestupu.
Zdroj: spaceflight101.com

Zdroj: spaceflight101.com
Na pouzdru Schiaparelli najdeme trysky CHT 400 vyrobené firmou Airbus Defense and Space, které jsou schopny maximálního tahu 440 Newtonů. Trysky využívají katalytického rozkladu hydrazinu na zahřáté kovové mřížce. Touto rozkladnou reakcí vznikají plyny, které jsou následně prohnány tryskou ven. Trysky pracují v pulsním režimu, s frekvencí až 5 pulsů / sekundu, přičemž každá tryska pracuje nezávisle na ostatních.
Časy, kdy budou jednotlivé trysky otevírány a zavírány určí řídící jednotka, která vyhodnotí data z akcelerometrů a radaru. Každá tryska by měla za sekundu spotřebovat 700 gramů hydrazinu. S celkovým tahem 3600 N by měl 300 kilový modul zpomalit z 250 na 7 km/h. Operační provoz palivového systému začne ještě před vstupem do atmosféry, kdy se odpálí pyrotechnické ventily, takže hydrazin se vydá z nádrží palivovým systémem k tryskám. Teprve až poté, co dojde k aktivaci dalších pyrotechnických ventilů a natlakování celého systému, bude pohonný systém připraven.
Zdroj: spaceflight101.com
Elektrický systém
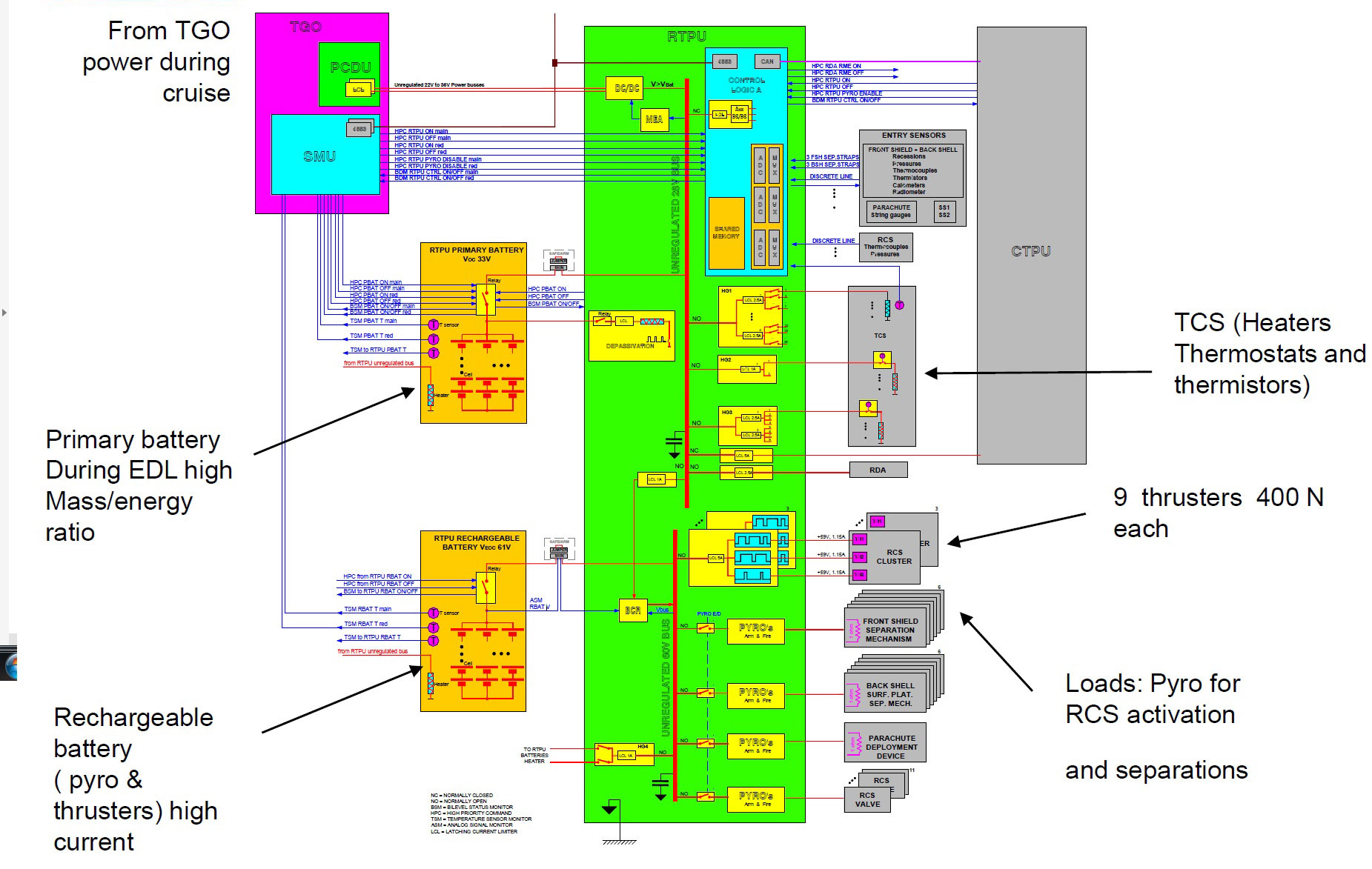
Pouzdro EDM po oddělení od sondy TGO čerpá veškerou svou energii ze čtyř typů palubních baterií. Primární jsou nenabíjecí baterie EDL (Entry, Descent & Landing) pro hlavní fázi, tedy průchod atmosférou a přistání. Dále tu najdeme elektrické akumulátory také pro fázi EDL, které budou čerpat energii ze sondy TGO. Tyto dva typy najdeme na vnější části povrchové platformy a nebudou mít žádnou tepelnou ochranu. Zbývající dva typy (Surface Operations Primary Battery a Surface Payload Battery) jsou určeny k napájení palubních systémů po přistání a najdeme je v teplém oddělení modulu.
Zdroj: spaceflight101.com
Elektrické akumulátory se skládají ze tří paralelních větví elektrických článků a pracují s 61 volty. Naopak primární baterie pro EDL mají také tři paralelní větve, ale pracují se 33 volty. Neregulovaná větev se 60 volty se použije pro různé pyrotechnické operace – vystřelení padáku, oddělení předního štítu, oddělení zadního štítu, aktivace pyrotechnických ventilů v pohonném systému a také ovládá ventily trysek. Primární baterie s 33 volty zásobuje senzory, kontrolní systémy, paměť, systém tepelné kontroly a podobně.
Výkon baterií pro práci na povrchu záleží na jejich teplotě. Aby vydržely pracovat co nejdéle, jsou vybaveny teplotními senzory a ohřívači. Jak již bylo v článku uvedeno – krátce po oddělení od sondy TGO přejde Schiaparelli do hibernace, která má šetřit energii. Při ní bude spotřeba celé sestavy pouze 7 W – aktivní bude pouze počítač a ohřívače baterií. O probuzení z hibernace se postará trojnásobně zálohovaný časovač.
Operace na povrchu budou důkladně plánovány s ohledem na limitované množství energie. Cílem je vytěžit i přes tyto limity z vědeckých přístrojů maximální množství vědeckých dat a odeslat je na Zemi. Po čtyřech dnech se totiž baterie pravděpodobně vyčerpají a lander se navždy odmlčí.
Zdroj: spaceflight101.com
Zpracování dat a komunikace
Zdroj: spaceflight101.com
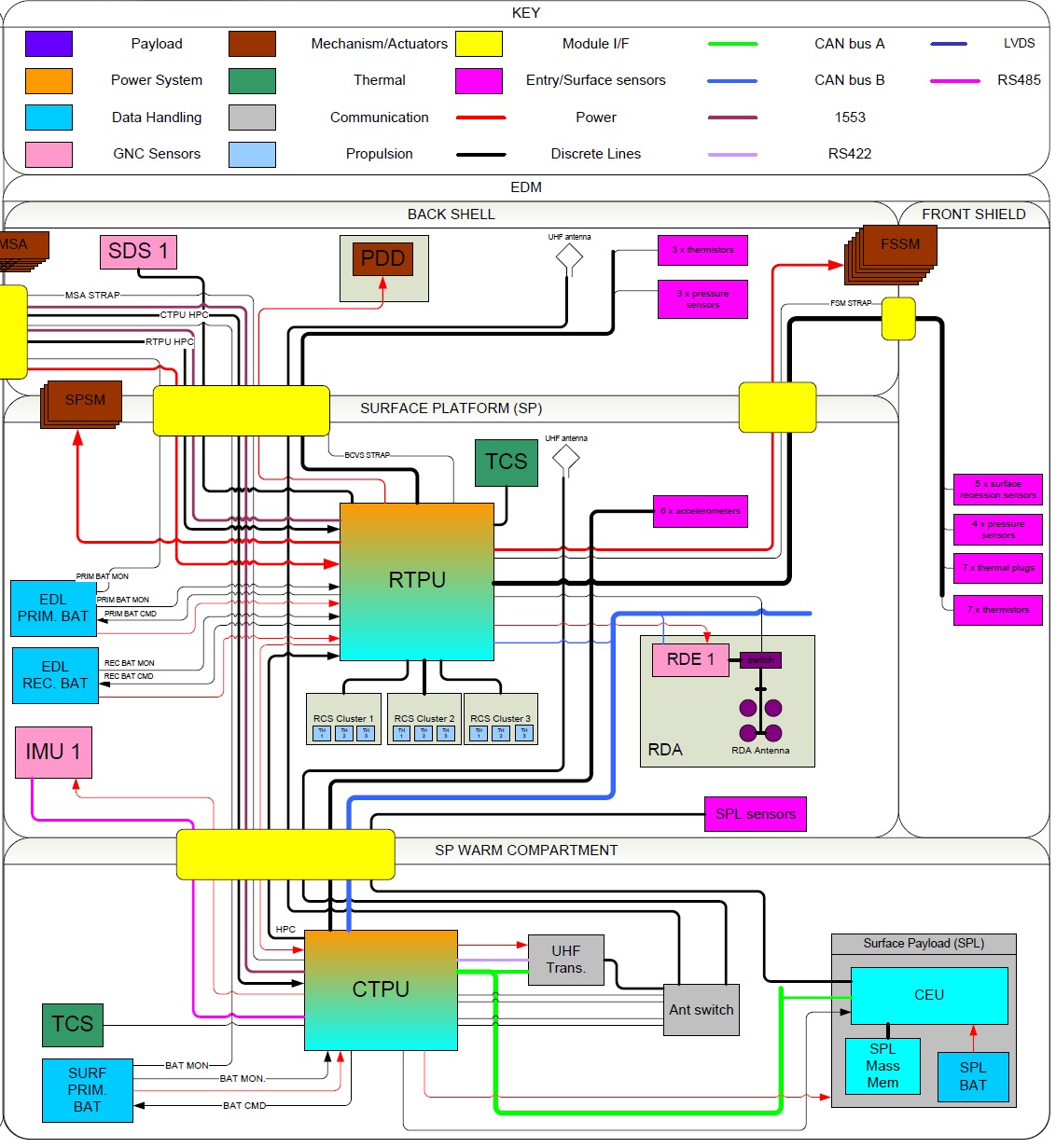
Uvnitř teplého oddělení modulu EDM najdeme také centrální počítač – Central Terminal & Power Unit (CTPU) – který zodpovídá za ovládání všech systémů landeru při povrchových operacích a hospodaří s energií z baterií. Kromě jiného přijímá z vědeckých přístrojů výsledky jejich měření, ale také přes něj proudí údaje o stavu jednotlivých systémů. Počítač tyto informace ukládá a stará se i o jejich odeslání přes UHF pásmo.
Druhá řídící jednotka nese název Remote Terminal & Power Unit (RTPU) a našli bychom ji na spodní straně povrchové platformy. Tato jednotka zodpovídá za operace v průběhu průchodu atmosférou až do přistání. Jejím úkolem je zpracovávat data z řídících senzorů, rozhoduje o vykonání různých operací včetně vystřelení padáku, kontroluje chod trysek a hospodaří s energií v EDL bateriích. Tato řídící jednotka navíc komunikuje se sondou TGO dokud jsou obě části spojené – stará se o zásobování energií a dodává informace o stavu palubních přístrojů do sondy TGO.
Zdroj: spaceflight101.com
Jelikož je jednotka RTPU umístěna na spodní straně landeru, neočekává se, že by přežila náraz při přistání. Proto její programové vybavení končí pokynem pro vypnutí motorů.
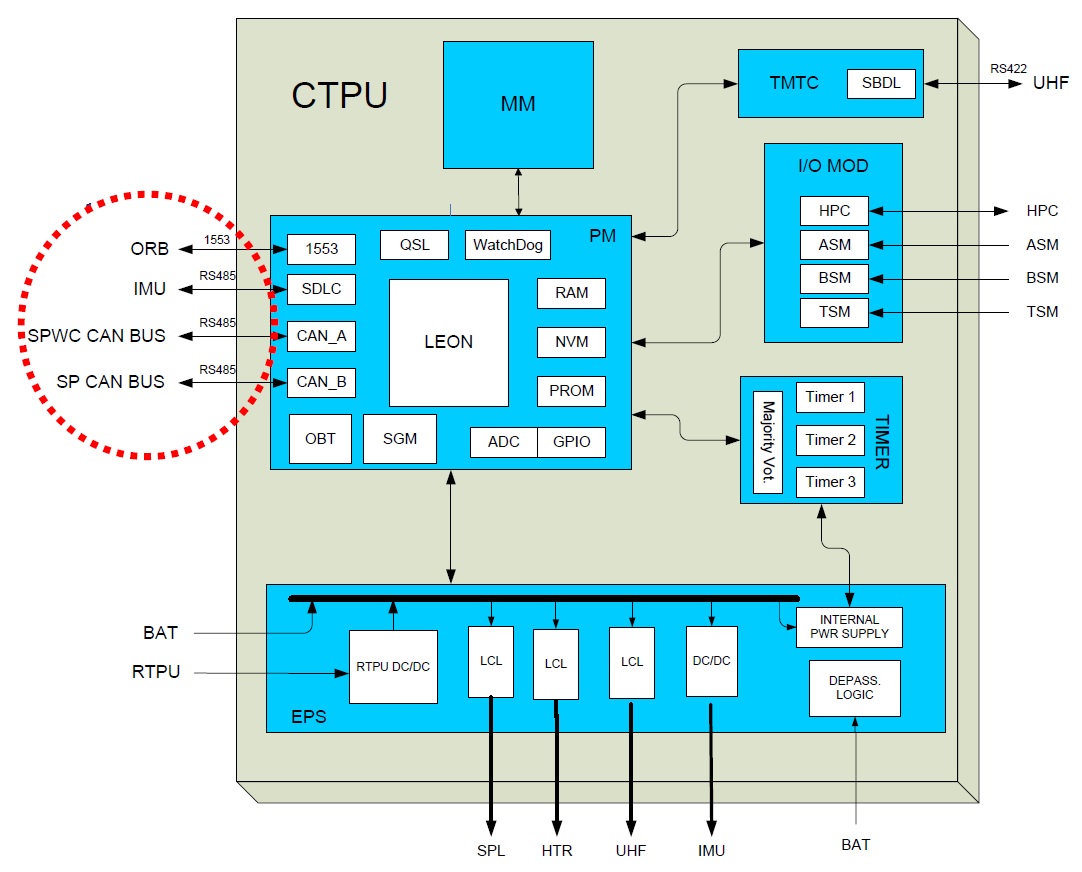
Jednotka CTPU je postavena na základě procesoru LEON, kolem kterého jsou umístěny další prvky tohoto výpočetního srdce landeru – řeč je o pamětech RAM a PROM, palubním časovači, elektrických konvertorech a zařízeních pro příjem/výdej dat. Externí paměť je určena k ukládání vědeckých dat i údajů o stavu palubních přístrojů, dokud není možné tyto údaje odeslat na sondu TGO. Jsou tu také tři externí časovače, které jsou spojené do jednoho systému s hlasovacím systémem. Pokud jeden ze tří časovačů postihne chyba, zbylé dva fungující jej „přehlasují“.
Komunikace je zajištěna pouze v pásmu UHF pomocí antén umístěných v teplém oddělení landeru a také v zadním štítu. Anténa v zadním štítu se použije pro odesílání dat v reálném čase při průchodu atmosférou – jde o bezpečnostní pojistku pro případ, že by se přistání nepodařilo. Pokud by k tomuto scénáři došlo, nebyla by všechna data ztracena. Údaje se budou ukládat do palubní paměti TGO pro případ, že se modul z povrchu už neozve.
UHF systém se skládá z elektrické jednotky, UHF přijímače a vysílače a UHF antény. První komunikace se sondou TGO nastane při průchodu atmosférou a během provozu na povrchu jsou naplánována dvě komunikační okna – každé s délkou okolo 13 minut. Během těchto komunikačních oken, kdy bude mít EDM výhled na sondu TGO by se mělo podařit přenést 100 Mbit inženýrských a telemetrických dat o stavu palubních přístrojů a 50 Mbit vědeckých údajů nasbíraných na povrchu. Nabízí se také možnost posílat data přes americké sondy, které budou přelétat nad místem přistání.
Třetí díl našeho seriálu pohled pod kůži končí a doufáme, že se Vám líbil stejně, jako díly minulé. Stejně jako v předchozích případech, i tentokrát bych rád upozornil, že jsem se při překladu originálního článku z portálu spaceflight101 mohl nedopatřením dopustit omylu, nepřesného, či matoucího překladu. Pokud k tomu došlo, pak se samozřejmě za chybu omlouvám a po upozornění ji samozřejmě v článku opravím. V příštím díle našeho seriálu se podíváme, jak už bylo slibováno, na vědecké vybavení modulu EDM.
Zdroje informací:
http://spaceflight101.com/exomars/schiaparelli-edm/
Zdroje obrázků:
https://scontent-fra3-1.xx.fbcdn.net/…7529556990988652418_o.jpg
https://upload.wikimedia.org/wikipedia/commons/0/04/Giovanni_Schiaparelli_1890s.jpg
https://scontent-fra3-1.xx.fbcdn.net/…4971660054796568164_o.jpg
http://spaceflight101.com/…/ExoMars_2016_Schiaparelli_descent_sequence.jpg
http://spaceflight101.com/…/ExoMars2016_20160212_LC_AIT_79_1280.jpg
http://spaceflight101.com/…/EDM_module_installed_at_the_top_of_the_TGO-3.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM3.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM2.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM5.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/TPS2.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM4.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM6.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM7.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM8.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM9.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM10.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM13.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM11.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM12.jpg
http://spaceflight101.com/…/ExoMars_Schiaperelli_Flight_Landing_Platform.png
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM17.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM14.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM15.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM16.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM18.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM19.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM21.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/EDM20.jpg




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Skvele, jen jednu drobnost – FPGA neni zadna brana, ale pole. Programovatelne hradlove pole. Jde o strukturu „Gate Array“, hradlove pole, to je cesky terminus technikus – hradlo (gate). Zakladni jednotka digitalni logiky, neco jako tranzistor pro elektroniku. Kazdy bezny cip obsahuju tisice a miliony hradel, ruzne spojenych, ale programovatelna pole obsahuji tato hradla v nespojenem stavu, a prave zpusob jejich vzajemneho propojeni je variabilni na zaklade sw nastaveni. Cili kus hardware, ktery funguje ruzne, podle nahraneho „programu“, ktery nastavi jak se ma co s cim propojit.
Díky, opraveno!
Ufff… Je tam malý překlep: „Neoficiální název SchAIparelli je odvozen…“ a díky za něj, bo jsem si při scrollování k diskuzi uvědomil, že asi nebude vhodné toho macka číst celého v práci 🙂 Nechávám si na čekání na Falcona, podle obrázků se mám na co těšit
Díky, opraveno. 😉
Další drobností je, že „Inertial Measurement Unit“ není „vnitřní“, ale inerciální navigační jednotka (jak dobře vyplývá z dalšího textu). Stejně jako např v ponorkách, kde není možné spolehnout se na navigaci pomocí kompasu, GPS, hvězd,… se využívá měření změny natočení setrvačníků doplněných akcelerometry pro výpočet aktualní polohy.
Jinak jak je to s rozměry toho padáku? V textu je průměr 12m, na výkresu vedle 8,64m (na centimetr přesně!!). Chápu, že v tahu se průměr vrchlíku padáku mění. Jaký rozměr ale má smysl měřit? Předpokládám, že není ušitý tak, aby šel rozložit na zem jako prostěradlo a pak měřit jeho průměr. Snad by mělo smysl udávat interval průměru v různých fázích přistání v závislosti na rychlosti a hustoty atmosféry.
IMU jsem opravil, díky za upozornění.
Ohledně rozměrů padáku jsem taky trochu zmatený a nevím, kde je pravda.
Pokusil jsem se tu pravdu najít, nebylo to, pravda, úplně jednoduché :-). Jak to tedy chápu já:
Obrázek s průměrem 8,64 m je nominální rozevření padáku, tedy rozevření, které nastane pro určitou modelovou situaci s pevně danou rychlostí a hustotou atmosféry. Údaj „padák s průměrem 12 m“ vychází z toho, že jeden dílek (srpek, „trojúhelník“, nevím jak to mám přesně přeložit, v angličtině se používá slovo gore) padáku má délku cca 6 m (předpokládám ale, že způsob sešití dílů k sobě neumožňuje rozevření padáku až na 12 m).
Vyzházím z téhle práce, str. 19:
http://www.gmpasta.it/doc/master_thesis.pdf
Ahá! Tak to by mne nenapadlo. Moc díky za vysvětlení!
Opět (již potřetí) výborná práce na misi TGO + EDM. Pro mě asi nejzajímavější. Přece jen – družice je zkrátka družice, ale landery jsou výjimečné 🙂
Díky za pochvalu. 🙂
Diky! neuveritelne obsahle-Tohle je mozne se docist jen u vas !
Děkujeme mnohokrát za pochvalu. Stejné informace jsou i v článku na webu spaceflight101, který jsme při tvorbě tohoto článku překládali. Ale je fakt, že tam jsou v angličtině.
Paráda, paráda a zasa paráda!
Súhlasím s B.B. – povedal by som že takéto informácie sú vzácnosť. A opäť vďaka autorovi článku za skvelú prácu.
Len by som sa chcel spýtať – prečo je nevhodné aby splodiny z trysiek narážali do terénu?
Díky moc za pochvalu, opravdu mne to těší!
Spaliny, které se odráží od povrchu mohou např. narazit na spodní stranu modulu a tím jej rozkývat nebo jinak rozhodit.
Spoustě technických pojmů rozumíme, ale česky by měly být jinak:
– nabíjecí baterie -> elektrický akumulátor (tedy nejen „akumulátor“, neboť ten může být třeba i pneumatický nebo hydraulický)
– běžný pojem „baterie“ je v podstatě soubor (elektrických článků, ale třeba i děl), přesněji by se tedy tento výraz užívat s další specifikací, tedy třeba elektrická baterie… tady bych to ale nijak nehrotil, neboť to se používá hodně často i dlouho
– pojem „vlákno“ se v dané souvislosti nepoužívá, je to paralelní spojení tří elektrických baterií/akumulátorů, případně je vhodnější použít pojem „větev“ (tedy tři paralelní větve elektrických článků)
– pojem „primární baterie“ je chápán jako hlavní baterie (podobně jako sekundární baterie = pomocná/záložní baterie), ale tady to má být baterie tvořená primárními články (tedy ty co se nenabíjí; tady patrně na bázi LiSOCl2)
FPGA (Field Programable Gate Array, programovatelné hradlové pole) s rychlými A/D převodníky komplexních složek (I a Q) vstupního signálu tvoří digitální detektor/demodulátor
Díky za doplnění, pokusím se některé pasáže přeformulovat.
Jen drobnost v předposledním odstavci: „Během těchto komunikačních oken, kdy bude mít EDL výhled na sondu TGO……“ Určitě má být EDM. EDL se také vyskytuje, takže by to mohlo někoho zmást 🙂
To je pravda, díky za upozornění, opravím to.
Zase vynikající článek, tenhle seriál je neuvěřitelný. Díky všem za upřesňující a rozvíjející diskuzi a obrovské díky Kosmonautixu a Dušanovi Majerovi.
Díky moc, těší nás, že se Vám naše články líbí. 😉
Je zajímavé, že v ne příliš starších zmínkách o EDM (možná i jen rok zpět?) se vyskytuje životnost na povrchu podle baterií osm dní nebo týden. Aktuálně jsme na čtyřech dnech. Má to nějaký speciální důvod nebo jde jen o pojistku na překročení životnosti? 🙂
Tipoval bych to na bezpečnostní rezervu kdyby se náhodou něco nepodařilo.
Už se ví, jak přesně bude přistávat plošina s roverem? Jde mi o tu poslední fázi před kontaktem. Jestli to bude podle vzoru EDM (tedy deformační zóna) nebo měkčeji.
Osobně bych předpokládal, že dojde k měkčímu typu dosednutí, ale detaily jsem zatím nikde neviděl.