Sonda Lunar Reconnaissance Orbiter (LRO) měla být jakýmsi předvojem návratu Američanů na Měsíc. Jejím hlavním úkolem bylo vytvořit podrobnou mapu Měsíce, zjistit, zda na něm je voda a další suroviny, které by co nejvíce pomohly snížit množství nákladu pro budoucí lunární základnu, jenž by se musel vozit ze Země. Dalším úkolem bylo zkoumat radiaci na Měsíci, její množství a povahu ovlivněnou například i topografií terénu. To vše mělo sloužit k výběru míst pro přistání lidských posádek a zbudování stálé lunární základny.
Dnes už víme, že se návrat lidí na Měsíc odsouvá více do budoucnosti, neboť program Constellation byl zrušen a nový program se zaměřuje spíše na výpravy k ateroidům. To ovšem nebrání sondě LRO, aby dál zkoumala výskyt vody na našem nebeském souputníku a hlavně pořizovala spousty snímků, ze kterých se postupně tvoří velmi detailní mapa Měsíce. Tyto snímky mají dostatečné rozlišení k tomu, abychom na nich mohli rozpoznat artefakty amerických i sovětských návštěv Měsíce.
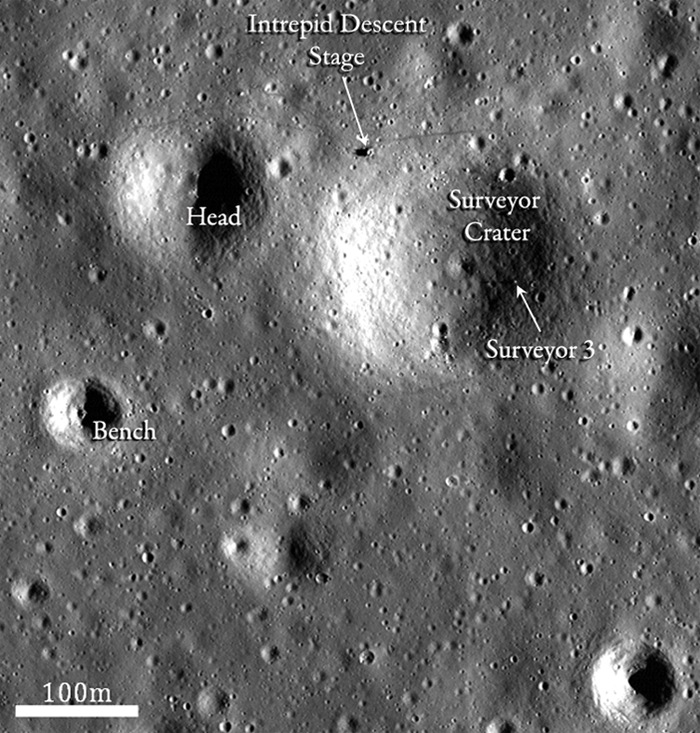
Zatím nejaktuálnější je snímek lunárního modulu Intrepid mise Apollo 12. Tady prokázal lunární modul, jak umí přesně přistát. Cílem totiž nebylo nic jiného než kráter v Oceánu bouří (Oceanus Procellarum), u kterého před ním přistál Surveyor 3 (kráter pak nesl jeho jméno). Od sondy dělilo Intrepid pouhých 155 metrů. Blíže už vlastně ani moc nemohl, protože by na Surveyoru mohly ulpět látky z jeho přistávacího motoru.
zdroj:nasa.gov
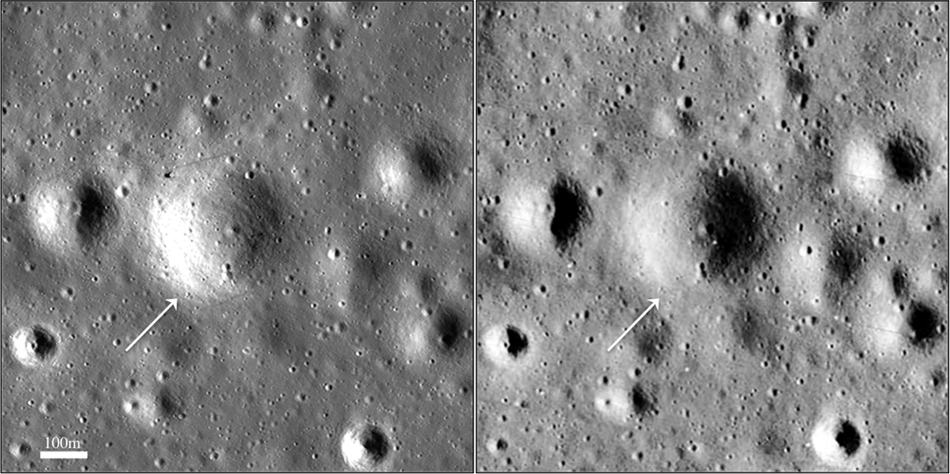
Že to nebyly plané obavy se můžete přesvědčit při porovnání aktuálního snímku s tím, který pořídila sonda Lunar Orbiter-3 v roce 1967, když pomáhala vybírat místo pro Surveyor 3 a Apollo 12. Snímek z LRO je mírně přisvětlen, aby se dal lépe porovnat s původním, takže některá místa jsou trochu přepálená. I tak si lze všimnout, že okraj kráteru blíže k lunárnímu modulu výrazně více odráží sluneční paprsky. To je způsobeno usazením částic z výfukových plynů motoru Intrepidu vypouštěných během sestupu. Přímo pod lunárním modulem byl ale povrch plyny narušen a zdrsněn, takže se jeví naopak tmavší.
zdroj:nasa.gov
Sondě Lunar Reconnaissance Orbiter se podařilo postupně vyfotografovat místa přistání všech misí Apollo. Pokud máte 3D brýle (red-cyan), můžete si je stereoskopicky prohlédnout v příslušném vláknu na fóru kosmoanutix.cz. Časosběrné fotografie, kde můžete najít stejná místa při různém úhlu dopadajících slunečních paprsků můžete vidět zde (Flip Book).
zdroj:spaceflightnow.com
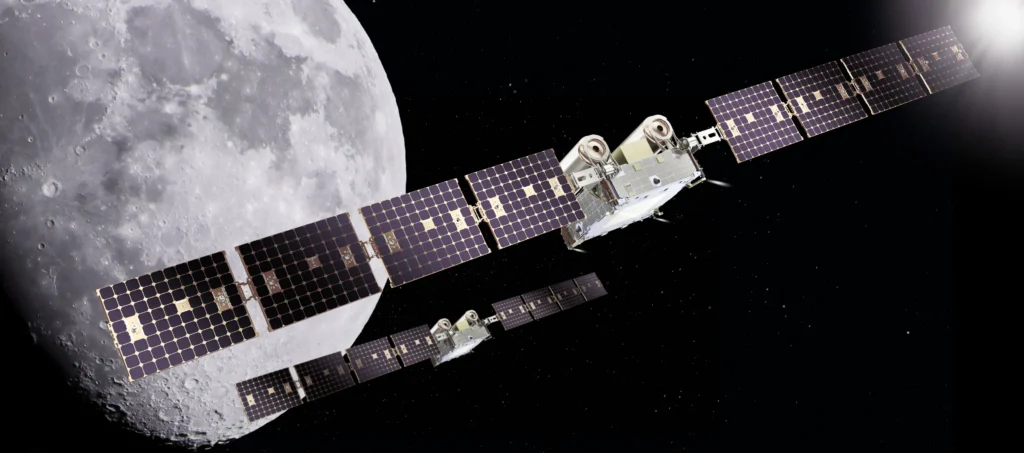
Mimo pilotovaných misí vyfotila LRO i sondu Ebb z nedávno dopadnuvší dvojice Ebb a Flow, které společně vytvořily gravitační mapu Měsíce. Jak již bylo napsáno v úvodu, kromě amerických strojů se LRO podařilo zachytit i ty sovětské. Cenným úlovkem se staly oba Lunochody. I když ten druhý byl správně rozpoznán až napodruhé (viz kosmonaut.cz z roku 2010).

zdroj:nasa.gov
Ptáte se, čím sonda LRO získává tyto snímky? Odpověď se skrývá za zkratkou LROC (Lunar Reconnaissance Orbiter Camera). Avšak nejedná se o jednu kameru nýbrž o tři. Jedna širokoúhlá Wide Angle Camera (WAC), která poskytuje náhled celé oblasti v rozlišení 100 metrů na pixel při 60 km širokém pásu a dvě úzkoúhlé kamery s rozlišením 0,5 m na pixel, přičemž každá zabírá pás o šířce 5 km.
LRO začínala s rozlišením přibližně 1 metr na pixel a teprve jak výška její oběžné dráhy klesala, tak se rozlišení zvyšovalo. Metr na pixel vypadá na první pohled skvěle, ale stejné rozlišení měla už sonda Lunar Orbiter-5 v roce 1967, i když kolísala kvalita zpracování a přenosu obrazu. Soustava kamer LROC je modifikovaná verze přístroje ConTeXt Camera (CTX) na marsovké družici Mars Reconnaissance Orbiter (MRO). Tam ale slouží pouze jako náhledová kamera s rozlišením 8 m/pixel. Je to dáno také podstatně větší výškou, ve které MRO operuje: 250-316 km

zdroj:techno-science.net
nad povrchem, kdežto LRO jen 50 km nad povrchem, navíc mu nebrání ve výhledu žádná atmosféra.
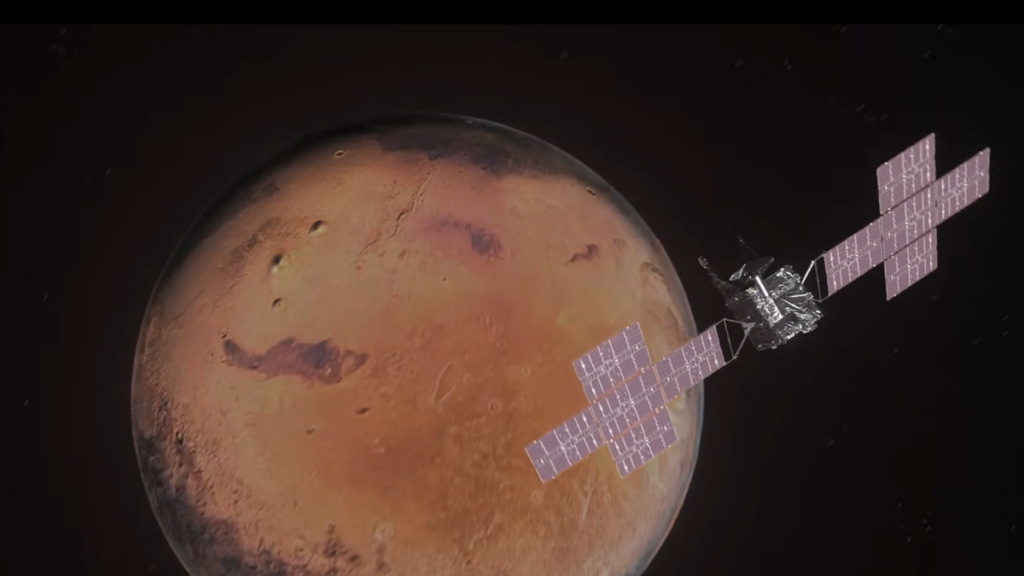
Pro skutečně detailní snímky má MRO ve svém portfoliu kameru HiRISE (High Resolution Imaging Science Experiment) s rozlišením 30-60cm na pixel. Na další fotografii plně předvedla své možnosti, když zachytila rover Opportunity na okraji kráteru Victoria (uprostřed obrázku).
Všimněte si stínu otočného stěžně PMA (Pancam Mast Assembly), který má na výšku 83 cm. Pokud by kamerou HiRISE disponovala sonda LRO pouhých 50 km od měsíčního povrchu, rozlišili bychom i onu legendární první lidskou stopu Neila Armstronga. Problémem by zřejmě pak bylo ukládání obrovského množství dat, které by sonda odeslala na Zemi. Už takto její data zabírají prostor několika stovek Terabytů.
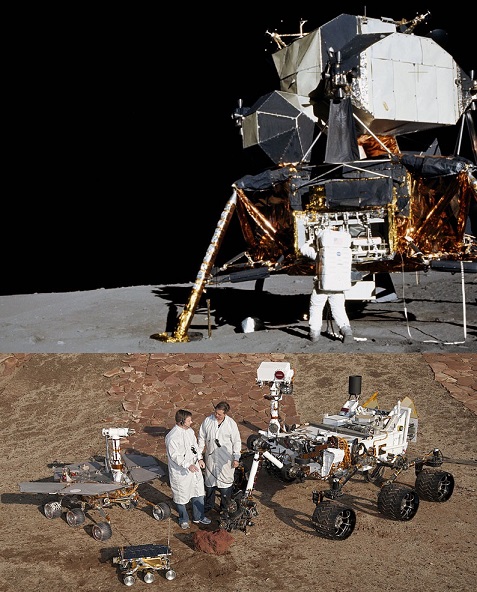
Pro představu si prohlédněte porovnání lunárního modulu a marsovských roverů k lidské postavě.
zdroj:nasa.gov
A nakonec ještě parádní kousek MRO, kdy se mu podařilo zachytit na snímku pouzdro MSL, snášející se na největším padáku, který byl kdy použit pro přistání na cizí planetě.
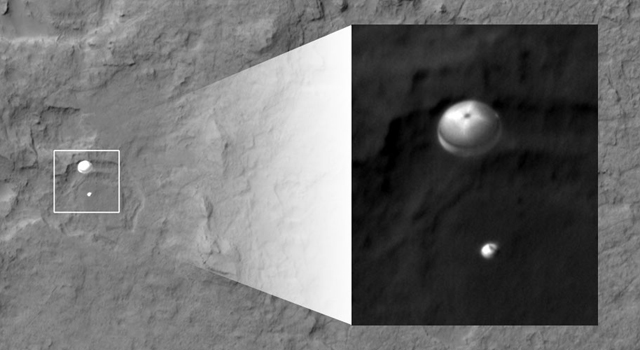
zdroj:nasa.gov
Zdroje informací:
http://www.nasa.gov/content/lunar-reconnaissance-orbiter-looks-at-apollo-12-surveyor-3-landing-sites/#.Ud5lTjcXE4B
http://lroc.sese.asu.edu/news/index.php?/archives/654-Surveyor-Crater,-Before-and-After.html
http://forum.kosmonautix.cz/viewtopic.php?f=30&t=14&start=10
http://www.kosmonaut.cz/2010/04_2010.html
http://lroc.sese.asu.edu/EPO/LROC/lroc.php?pg=what
http://cs.wikipedia.org/wiki/Lunar_Orbiter_3
http://lroc.sese.asu.edu/news/?archives/260-New-Impact-Crater-on-the-Moon!.html
http://en.wikipedia.org/wiki/Mars_Reconnaissance_Orbiter#Launch_and_orbital_insertion
http://mek.kosmo.cz/sondy/usa/mars/mer/index.htm
Zdroje obrázků:
http://lro.gsfc.nasa.gov/images/gallery/hi-res/LRO-Print3-with-bg-sm.jpg
http://www.nasa.gov/sites/default/files/m177785917_labeled_thumb_0.png?itok=RbW3KNkQ
http://www.nasa.gov/sites/default/files/lroc_lo3_fi_thumb_arrows.png?itok=M4UAUQm_
http://www.spaceflightnow.com/news/n1303/20grail/grailA20130319_400.gif
http://techno-science.net/illustration/Espace/Mars/mars-MRO-Opportunity-1-gp.jpg
http://marsrovers.jpl.nasa.gov/spotlight/spirit/images/AS11-40-5928_040602123519.jpg
http://modemworld.files.wordpress.com/2012/08/msl-1.jpg
http://www.jpl.nasa.gov/images/msl/20120806/PIA15978-640.jpg
http://lroc.sese.asu.edu/EPO/IMG/lroc2.jpg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pěkný článek jako vždy 🙂
díky