
Hned na začátek článku si vysvětleme slovo telerobotika. Wikipedia nám k tomuto heslu říká, že jde o oblast robotiky, která se zabývá řízením poloautomatických a automatických strojů na dálku. Už dnes tyto stroje pomáhají například pyrotechnikům, nebo lékařům. Do budoucna se jedná o velmi progresivní směr, který může hrát důležitou roli i při průzkumu cizích planet. I o tom se v dnešním článku zmíníme. V pondělí 7. září se dánský kosmonaut Andreas Mogensen, v současné době pobývající na Mezinárodní vesmírné stanici, pustil do telerobotických zkoušek. Na tom by nebylo nic tak neobvyklého, pokud by operátora a ovládaný stroj nedělila vzdálenost v řádu tisíců kilometrů.
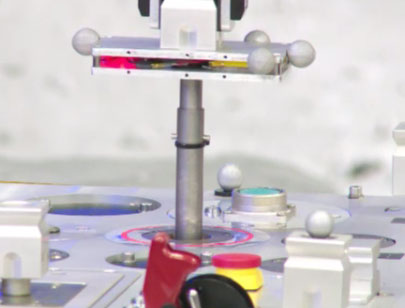
Telerobotické zkoušky se skládaly ze dvou různých testů. V prvním z nich (a divácky atraktivnějším) přišel ke slovu čtyřkolový rover Centaur umístěný v technologickém centru Evropské kosmické agentury v nizozemském ESTECu. Mogensen na oběžné dráze mohl ovládat nejen jeho kola, ale také paži, ve které robot svíral malý kovový váleček. Úkol byl na první pohled jednoduchý – dojet s roverem k maketě družice a zasunout váleček do požadovaného otvoru.
Zdroj: https://scontent-fra3-1.xx.fbcdn.net
Co už ale kosmonaut nevěděl bylo to, že průměr otvoru byl jen o 0,15 milimetru větší, než samotný kolík. Pozemní operátoři to Mogensenovi neusnadnili použitím hladkých materiálů – třeba polyetylenu a kovu. Kdepak – otvor i kolík byly kovové, takže bylo potřeba pracovat velmi citlivě. Aby toho nebylo málo, všechno komplikovalo i zpoždění signálu.
Ten totiž musel z Mezinárodní vesmírné stanice letět na geostacionární dráhu, kde jej zachytily americké družice systému TDRSS a poslaly na pozemní stanici v USA. Odsud pak signál putoval do Evropy a robot v ESTECu vykonal požadovaný úkon. Opačným směrem pak neustále proudila obrazová data, podle kterých se kosmonaut na oběžné dráze řídil.
Andreas Mogensen napoprvé splnil úkol po cca. 45 minutách. Využíval přitom i laserového zaměřování a centrování zasunovaného kolíku. Po krátké pauze se konalo druhé kolo se stejným úkolem a tentokrát už to trvalo jen okolo 15 minut. Při druhém pokusu bylo vidět, že už se astronaut tolik nebojí a že už mu ovládání roveru přešlo více do krve.
Druhý úkol byl důležitý spíše pro vědce, než pro diváky. Mogensen se při něm chopil páky, kterou přitáhl k sobě – souběžně s ní se pohnula páka i v ESTECu, která se opírala o zařízení kladoucí volitelný odpor. Astronaut měl za úkol dvakrát zatáhnout za páku a pak zvolit, při kterém zatažení cítil větší odpor. Těchto sérii bylo naplánováno 120. Šlo o tři sady po 40 sériích, přičemž v každé byl rozdíl odporů jiný – od 30% do 5%.

Zdroj: https://scontent-fra3-1.xx.fbcdn.net
Cílem pokusu je určit, jak přesná je zpětná vazba, jak je tato schopnost ovlivněna stavem beztíže i to, kde astronaut ještě cítí rozdíl a kde už jen tipuje. Šlo o oboustranně slepý experiment, takže ani astronaut, ani pozemní operátoři nevěděli, která odpověď je správná. Data se následně vyhodnotí a určí se, kde si byl astronaut jistý (více než 75% správných odpovědí) a kde už víceméně tipoval. Sami operátoři přiznávali, že rozdíl 5% odporu už téměř není možné poznat.
Když jsme vloni navštívili den otevřených dveří v ESTECu, nahlédli jsme i do haly Telerobotics & Haptics Lab, kde se tento týden testovalo ovládání z ISS. Viděli jsme mnoho zařízení – od prototypů Centauru až po samotné telerobotické vychytávky. Každý si třeba mohl vyzkoušet na první pohled jednoduchou hračku. Stačilo otáčet jedním kolečkem a druhé, umístěné zhruba 20 centimetrů vedle něj se otáčelo stejně. Pokud se k páčce, která byla na tomto druhém kolečku přidala kostka molitanu, cítili jste při otáčení prvním kolečkem, jak to pruží.
Na tom by nebylo nic tak neobvyklého, pokud by byla kolečka spojená nějakým řemínkem,řetězem, nebo sestavou ozubených kol. Operátor, který seděl za stolem ale vždy jednou za čas zmáčknul Enter a najednou jste mohli kolečkem točit, jak jste chtěli a druhé se ani nepohnulo. V tu chvíli nám došlo, že celý přenos včetně zpětné odezvy odporu probíhal po celou dobu pouze elektronickou cestou a pak nehraje vzdálenost roli.
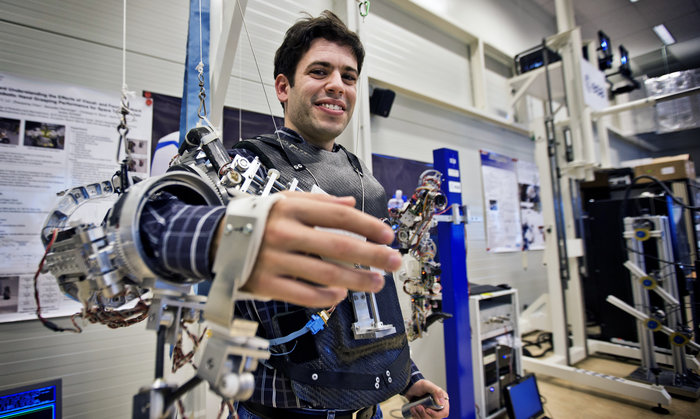
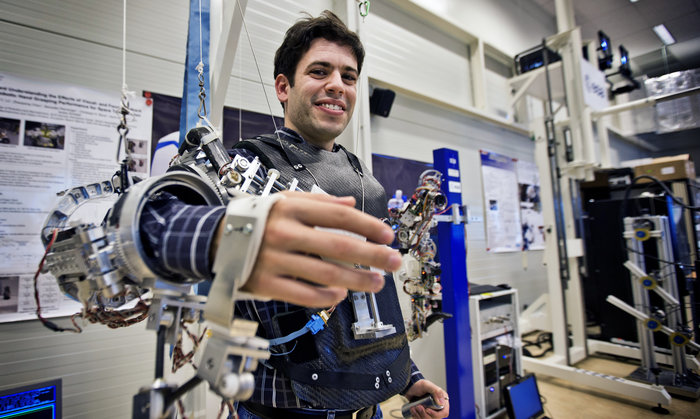
Mogensen na palubě ISS pracoval jen se základními ovládacími prvky, ale vloni v ESTECu jsme byli svědky pokročilých technologií, které si cestu do vesmíru teprve najdou – šlo třeba o exoskelety, které si operátor nasadil na ramena, navlékl do nich paži a všechny jeho pohyby se přenášely na robotické rameno na druhém konci místnosti.
Zdroj: http://www.esa.int/
O teoretických možnostech využití těchto technologií ani nemusíme příliš mluvit a každý si je dokáže představit sám – namátkou můžeme zmínit třeba ovládání roveru na povrchu Marsu z jeho oběžné dráhy. Spojily by se tak výhody pilotované a nepilotované kosmonautiky. Lidé by nemuseli komplikovaně přistávat na Marsu, řešit kontaminaci planety a tak dále a na druhé straně by odpadl problém s pomalou prací vozítek. Díky minimálnímu zpoždění by bylo možné rovery pohodlně a hlavně rychle ovládat. Nechme se překvapit, jaká další překvapení nám ještě telerobotika přinese.
Zdroje informací:
http://www.esa-telerobotics.net/
http://www.esa.int/
https://www.facebook.com/
Zdroje obrázků:
https://pbs.twimg.com/media/CNvX3qqUwAAMgMO.jpg
https://scontent-fra3-1.xx.fbcdn.net/…2f4ff5fe074baba75c8227f2204c8210&oe=56774B7B
https://scontent-fra3-1.xx.fbcdn.net/…10153045739040667_6973276964356685504_o.jpg
http://www.esa.int/…/exoskeleton/14562684-1-eng-GB/Exoskeleton_node_full_image_2.jpg




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ako vzdy, vdaka za zaujimave informacie. ESA rulez! 🙂
Ano, je krásné sledovat drobné pokroky vpřed v podání evropské agentury.
Těší nás, že se Vám článek líbil. 😉
Tak to je velmi zajímavé. Evropa jede ! 🙂
Mogensen sice na ISS pobývá jen pár dní, ale program má opravdu nabitý. 🙂
1) Má tento projekt název? (Centaur podle vozítka ?)
2) Jak dlouhé je zpoždění mezi pohybem páky a následnou reakcí vozítka? Při vzdálenosti Země Mars už přeci jen nějaké bude…
Při této příležitosti bych rád připomenul, že Dánsko má 5,6 Mil obyvatel 🙂 .
Projekt nemá žádný konkrétní název, pokud máte zájem o bližší informace, zkuste hledat heslo „telerobotics & haptics lab“, případně laboratory. To je totiž název divize, která má tyto projekty na starost.
Zpoždění bylo v řádu několika sekund. Podle operátorů to ale byla nějaká softwarová chyba – v reálu mělo být zpoždění menší. Ona se také tahle technologie nechystá pro ovládání robotů na Marsu ze Země, ale třeba z oběžné dráhy Marsu. 😉
Ad 2) V ideálním případě by se vozítko pohlo za 4 minuty a 20 sekund a za stejnou dobu by se vrátila zpráva zpátky, že se tak opravdu stalo (tedy 8:40). V nejhorším případě putuje signál od Země k Marsu a zpět přes 40 minut (a v úplně krajním tam překáží Slunce a neprojde nic). Z toho je vidět, že to pro takto dalekou komunikaci je k ničemu. Maximálně by se to dalo použít na Měsící s nějakou vyšší verzí Lunochodu. Tam by byla zpětná vazba dlouhá necelé 3 sekundy.
Přímé ovládání roveru na Marsu operátorem ze Země je vyloučeno. Probíhá to asi tak, že se pomocí pohledu palubní kamery naprogramuje cesta předem a podle tohoto programu rover koná. Má samozřejmě jistou samostatnost pro případ náhlého problému, ale v tom případě si musí pomoci sám. Na Zemi se o tom dovíme teprve po dvaceti minutách. V té chvíli již může být rover zavalen náhlým sesuvem nebo sežrán obřím písečným červem Šaj-hulůdem (což je zatím jediná známá forma života na Marsu).
Takze sa mozeme tesit na dalsie clanky tykajuce sa ESA projektov? 🙂
Pokud bude o čem informovat, pak o tom budeme rádi psát. 😉
Ad průzkum Marsu: Pro tyto účely by byla ideální základna na Phobosu nebo Deimosu jako předstupeň základny na Marsu. Hmota měsíce by poskytla stínění proti radiaci a byl by mnohem jednodušší návrat než z povrchu planety. Neuvažuje se do budoucna o nějakém takovém projektu?
Občas se nějaké takové návrhy objeví, ale nedá se říct, ež by to byl nějaký stabilní trend, který by byl dále rozpracováván. Spíše jsou to taková mediální plácnutí do vody ve stylu „Bylo by hezké, kdyby …“.
NASA vo svojich dlhodobych planoch pilotovanu misiu na Mars alebo jeho blizke okolie nema. Ak sa nieco objavi, su to studie, alebo vykriky do tmy. Zial 🙁
Cina sa v pilotovanej kozmonautika viac menej venuje obeznej drahe (ich verzia ISS) a Mesiacu (sondy+navrat vzoriek a v horizonte 20 rokov aj pristanie).
Jediny vazny zaujemca s dlhodobymi planmi s vyslatim cloveka na Mars je SpaceX.
„Co už ale kosmonaut nevěděl bylo to, že průměr otvoru byl jen o 0,15 milimetru větší, než samotný kolík.“
A teď kolik by se toho astronaut naučil, kdyby montoval Lesní Kolový Traktor :-D.