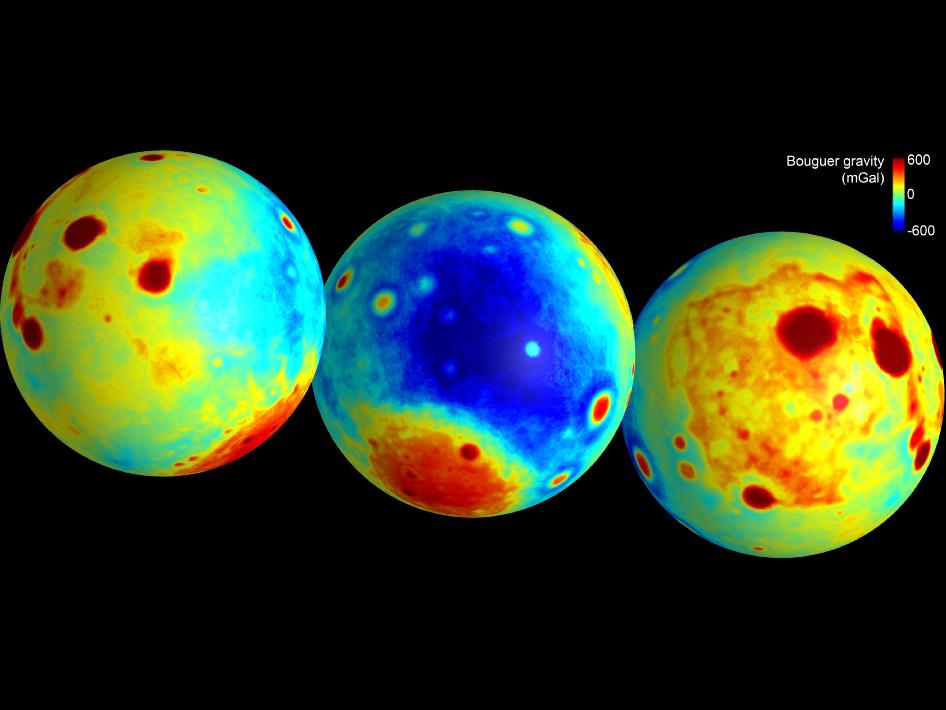
Úspěch, který zaznamenala v roce 2002 americko-německá dvojice družic GRACE (Gravity Recovery And Climate Experiment) na oběžné dráze Země v podobě velmi podrobné gravitační mapy naší rodné planety, inspiroval NASA k naplánování podobné mise. Tentokrát se měla týkat Měsíce. Vybavení k měření gravitačních anomálií bylo podobné koncepce jako na družicích GRACE s tím rozdílem, že u Měsíce nelze použít signál GPS, takže musí příjít na řadu jiný způsob, který si představíme v článku. Design si GRAIL vypůjčil z Experimental Small Satellite-11 (XSS-11) firmy Lockheed Martin a systém avioniky vycházel ze sondy Mars Reconnaissance Orbiter, která nám stále poskytuje cenná data z oběžné dráhy Marsu.
V květnu 2011 dorazily na floridský kosmodrom sondy GRAIL-A a GRAIL-B. Velikostí připomínaly větší automatickou pračku. Tomu odpovídala i hmotnost 201 kg. Po naplnění palivem se zvedla na 307 kg. Sondy byly téměř identické, lišily se jen v drobných detailech jako byla například poloha kamer a hvězdného trackeru. Důvodem byla nutnost otočení sond anténami k sobě, čili sondy navzájem připomínaly svůj obraz v zrcadle. O dodávky energie se staraly panely solárních článků. Každý o maximálním výkonu 700 W. Energii ukládaly li-ion baterie s kapacitou 30 Amperhodin. Té mělo být dostatek. Soustava byla mírně předimenzována neboť se počítalo s tím, že některé pole solárního panelu přestane pracovat. Solární panely záměrně neměly automatické natáčení ke Slunci, které by zlepšilo dodávku elektřiny. Pohyb panelu by mohl negativně ovlivnit měřené odchylky v dráze.
Jako pohon posloužil hydrazinový motor MR-106L s tahem 22N. Na drobné korekce stačily trysky se zahřátým plynem. Zajímavé je, že systém byl navržen jako single-string to znamená, že nebyl zdvojen. Inženýři to však u takto krátké mise vyhodnotili jako přijatelné riziko. O zpracování dat se staral procesor RAD-750, což je radiaci odolná verze procesoru IBM PowerPC 750, který dobře znají majitelé Macintosh G3. K dispozici byla 128 MB RAM a 512 MB volného prostoru na paměťové kartě. NASA používá RAD-750 pro meziplanetární sondy docela často. Z dalších uživatelů můžeme jmenovat teleskop Kepler, LRO, MRO nebo vozítko Curiosity.
Po všech možných testech byly oba GRAILY připojeny k nosné raketě Delta-II (podrobnosti o konfiguraci nosiče najdete zde) a odvezeny na startovací komplex 17B.
zdroj:nasa.gov
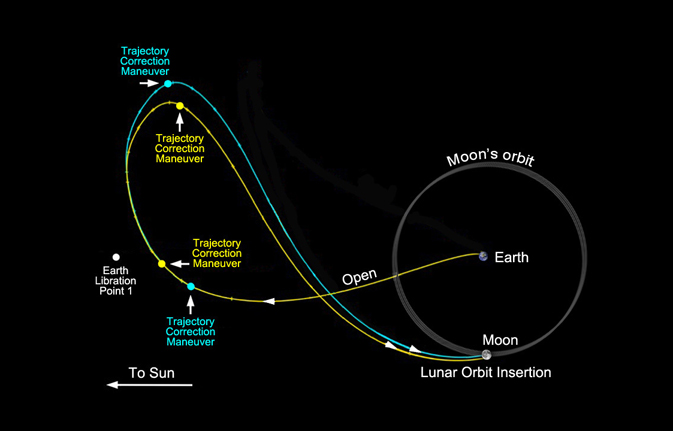
Po několika odkladech z důvodu špatného počasí se konečně 10.září 2011 raketa Delta-II zdvihla ze startovací rampy a zamířila s oběma sondami na oběžnou dráhu Země, kde se opakovanými zážehy druhého stupně vydaly sondy na cestu k Měsíci. První se odpoutal GRAIL-A. Pak se ještě jednou zažehl 2.stupeň Delty-II a došlo k odpojení GRAIL-B. Narozdíl od Apolla, které potřebovalo k dosažení Měsíce pouhé tři dny, letěly obě sondy přes librační bod1 Země-Slunce k Měsíci 3,5 měsíce po dráze dlouhé 4 milióny km s několika korekčními zážehy, které jsou naznačeny na obrázku. GRAIL-A tak dorazil k Měsíci na Silvestra 2011 ve 22:21 našeho času a GRAIL-B 1.ledna 2012 ve 23:05 SEČ. Okolo jižního měsíčního pólu se dostaly na polární eliptickou dráhu s dobou oběhu 11.5 hodiny. Postupnými zážehy v místě největšího přiblížení se jim podařilo dráhu upravit na téměř kruhovou s dobou oběhu 2 hodiny a výškou 55 km nad povrchem. To se povedlo do března 2012. Mezitím ale proběhla studentská soutěž o pojmenování obou sond. Takže k samotné vědecké misi už byly místo fádního označení GRAIL-A a GRAIL-B připraveny sondy Ebb (odliv) a Flow (příliv).

zdroj:nasa.gov
Použitá trajektorie příletu k Měsíci měla několik výhod. Předně umožnila navedení na oběžnou dráhu Měsíce velmi nízkou rychlostí a spotřebovalo se také méně paliva. Technici stačili během cesty provést všechny možné testy komponent na palubě. Tepelně se stačil během dlouhé cesty ustálit chod hlavního zařízení: ultra-stabilního oscilátoru. Ten musí všem ostatním zařízením na palubě poskytovat stálý referenční signál na přesně dané frekvenci. Toto zařízení de facto nahrazuje systém GPS, podle kterého se mohl synchronizovat u Země předchůdce GRAILu.
Princip měření gravitačních odchylek byl následující. Frekvence ultrastabilního oscilátoru byla převedena do frekvence v Ka-pásmu. Tuto frekvenci si sondy mezi sebou vysílaly a pomocí ní zjišťovaly změny vzájemné vzdálenosti a rychlosti. Spolu komunikovaly obousměrně v pásmu S. V tomtéž pásmu si také vyměňovaly data s pozemním střediskem přes síť Deep Space Network. To shromažďovalo hlavně informace o odchylkách referenční frekvence. Z dat se nechají získat údaje o gravitačních anomáliích a o rozložení podpovrchové hmoty.
Pro kontrolu vysílaly obě sondy frekvenci v pásmu X, která byla přesným násobkem referenční frekvence. Na Zemi ji přijímal Dopplerův radar, který by dokázal odhalit případnou odchylku. Toto měření se provádělo samozřejmě pouze v případě, že Země byla vidět.
zdroj:nasa.gov
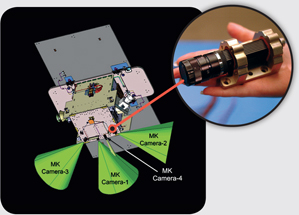
Součástí mise GRAIL byl i studentský projekt MoonKAM, volně navazující na dodnes aktivní program EarthKAM, provozovaný z paluby raketoplánu a nyní i z ISS. Patronkou projektu byla první americká astronautka Sally Ride. Na každé sondě se nacházely 4 kamery velikosti lidské dlaně. 1-3 měly 6 mm objektiv. Kamera 1 směřovala dolů, kamery 2 a 3 do stran pod úhlem 60 °. Kamera č.4 byla vybavena objektivem 50 mm pro větší detaily. Směřovala dolů k povrchu Měsíce. Všechny byly schopné pořizovat statické snímky nebo video rychlostí 30 snímků za sekundu. K ukládání a zpracování snímků před odesláním sloužila společná řídící jednotka.
Co se bude fotit respektive natáčet si určovali sami studenti. Ti sledovali aktuální trajektorii sond a zadávali si požadavky na snímání zajímavých oblastí Měsíce. S přehledem vyhrávala místa na odvrácené straně našeho souputníka. Poměrně časté byly pokusy o vyfotografování „východu Země“. Scenérii, kterou tak nádherně zachytila posádka Apolla 8, když se zapisovala do učebnic historie prvním obletem Měsíce člověkem.
zdroj:nasa.gov
Měření gravitace respektive odchylek v trajektoriích obou sond začalo v březnu 2012 a trvalo 89 dní. Ebb a Flow stačily za tu dobu přeletět nad každým místem Měsíce 3x. Jelikož sondám zbylo dost paliva a navíc se ukázalo, že kondice baterií je lepší než se papírově předpokládalo, bylo rozhodnuto o prodloužení mise a snížení oběžné dráhy, které mělo zajistit ještě přesnější výsledky. Nejprve byly sondy převedeny až do srpna 2012 do udržovacího stavu, ve kterém si musely poradit i se zatměním Měsíce (4.červen). V srpnu byla výška jejich oběžné dráhy snížena na 23 km a postupně se dostala až na pouhých 8 km nad povrchem. To už se pomalu blížil prosinec a s ním konec mise.
Řídící středisko spolu s vědci rozhodlo, že obě sondy ukončí svou existenci řízeným nárazem do Měsíce. Těsně před zánikem ale pomohou budoucím misím finálním experimentem, jenž zpřesní odhady zbývajícího paliva v nádržích kosmických strojů. Ebb a Flow před samotným dopadem zapnuly naposled své motory a nechaly je pracovat do vypotřebování všeho paliva z nádrží. Ebb vydržela s palivem 4 minuty a 3 sekundy, Flow dokonce ještě o minutu déle.
Samotný dopad nastal v samém konci 17.prosince 2012. Cílem byla oblast v okolí severního pólu blízko kráteru Goldschmidt. Ebb dopadla ve 23:28:51 SEČ a Flow o 27 sekund později. Oblast dopadu byla pojmenována po astronautce Sally Ride (viz. MoonKAM), která se bohužel konce mise nedočkala. Zemřela 23.července 2012. Žádné snímky ani video z dopadu k dispozici nejsou. Oblast sice byla na přivrácené straně, ale panovala tam v tu chvíli lunární noc. Takže řídící středisko mohlo obdržet maximálně telemetrické údaje a referenční signál.
Video s předpokládaným dopadem sond.
Zdroje informací:
http://forum.kosmonautix.cz
http://www.nasa.gov/
http://www.nasa.gov/
http://www.nasa.gov/
http://www.spaceflight101.com/
http://en.wikipedia.org/
Zdroje obrázků:
http://en.wikipedia.org/wiki/File:GRAIL_-_GRAIL-logo-sm.png
http://www.nasa.gov/images/content/613150main_Lehman-3-673.jpg
https://moonkam.ucsd.edu/images/about-camera_diagram_1.jpg
http://www.spaceflight101.com/uploads/6/4/0/6/6406961/7354314.jpg?518
http://www.nasa.gov/centers/jpl/images/content/711817main_pia16578-43.jpg




super článok
Díky