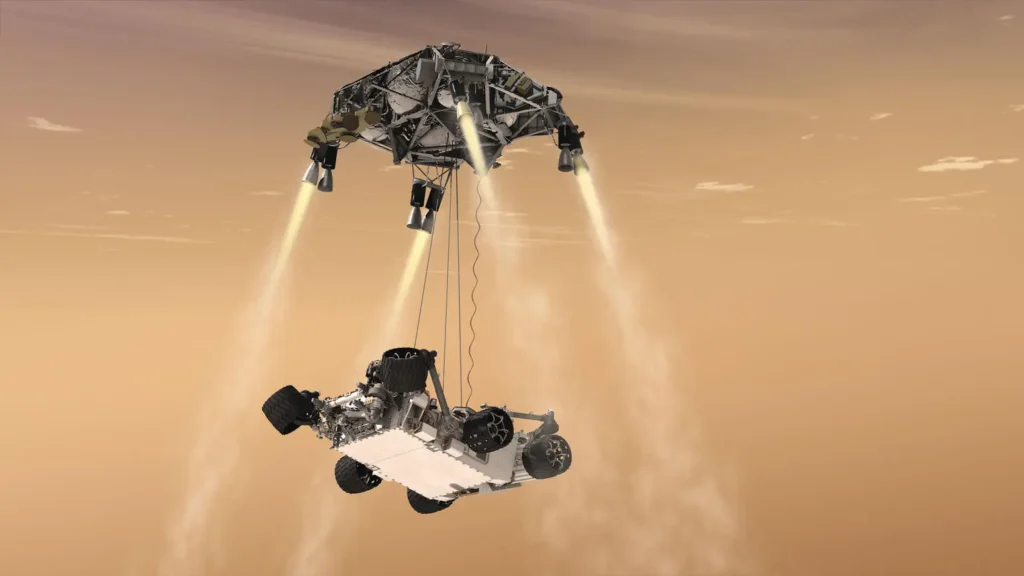
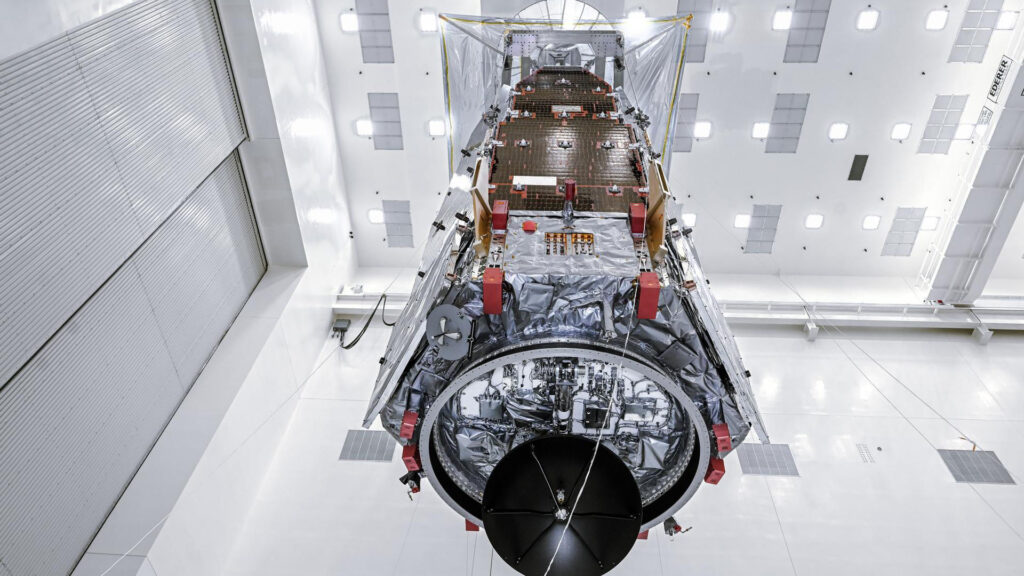
Před dvanácti lety se NASA podařilo posadit šestikolovou vědeckou laboratoř na povrch Marsu s využitím odvážné inovativní metody, která využívala motorické brždění i spouštění roveru na lanech. Vozítko Curiosity v těchto dnech slaví tucet let na rudé planetě a tento šestikolový vědecký aparát pokračuje ve velkých objevech, když postupně stoupá na horu Mount Sharp (Aeolis Mons). Už samotné přistání na Marsu je náročný úkol, ale mise roveru Curiosity šla ještě o několik kroků dál. 5. srpna 2012 byla poprvé v praxi využita nová a velmi odvážná metoda, která získala označení Sky Crane, tedy Nebeský jeřáb.

Zdroj: https://www.nasa.gov/
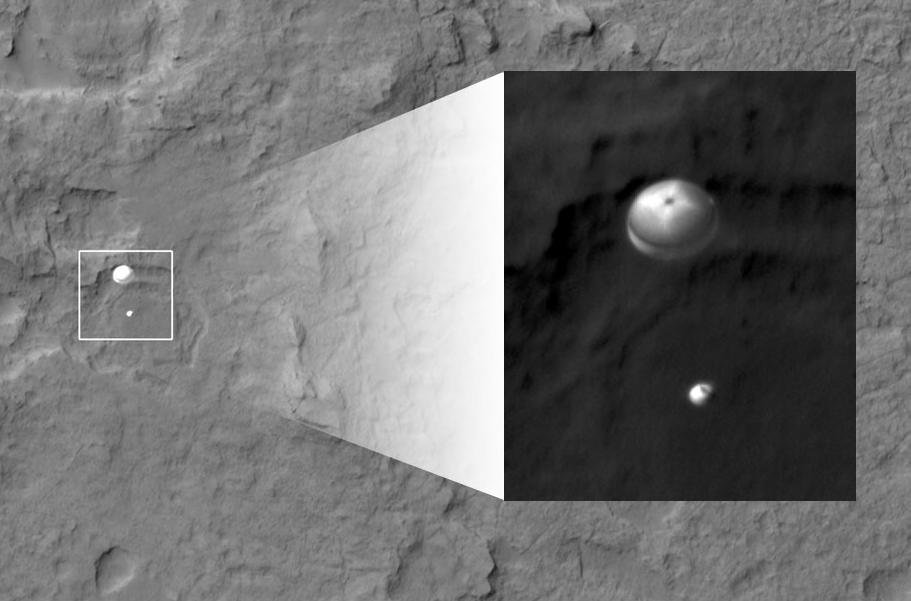
Přistávací aparát motoricky domanévroval s vozítkem do přistávací oblasti a poté spustil rover k povrchu na nylonových lanech. Po kontaktu kol s povrchem byla tato lana přeseknuta a přistávací zařízení odletělo pryč, aby mohlo v bezpečné vzdálenosti od roveru neřízeně dopadnout. Řídící tým samozřejmě nemohl nic z toho vidět na vlastní oči.
Experti seděli v řídícím středisku kalifornské Jet Propulsion Laboratory a čekali na sedm minut hrůzy, jak se přezdívá fázi přistání na Marsu. Když jejich čekání ukončil signál potvrzující, že rover úspěšně přistál, explodoval dav radostí.
Zdroj: https://www.nasa.gov/
Manévr označovaný jako Sky Crane se zrodil jako holá nezbytnost. Rover Curiosity byl totiž moc velký a těžký na to, aby mohl přistát jako jeho předchůdci – zabalený v kouli nafukovacích airbagů, která by poskakovala po povrchu Marsu. Nová metoda ale navíc umožnila také zvýšit přesnost přistání a zmenšit přistávací elipsu. V únoru 2021 vozítko Perseverance využilo vylepšenou verzi této metody, aby mohlo přistát ještě přesněji. Technici k již vyzkoušené technologii přidali navigaci podle relativního terénu. Vozítko o velikosti SUV tak mohlo bezpečně dosednout na dno dávného jezera poseté kameny a krátery.
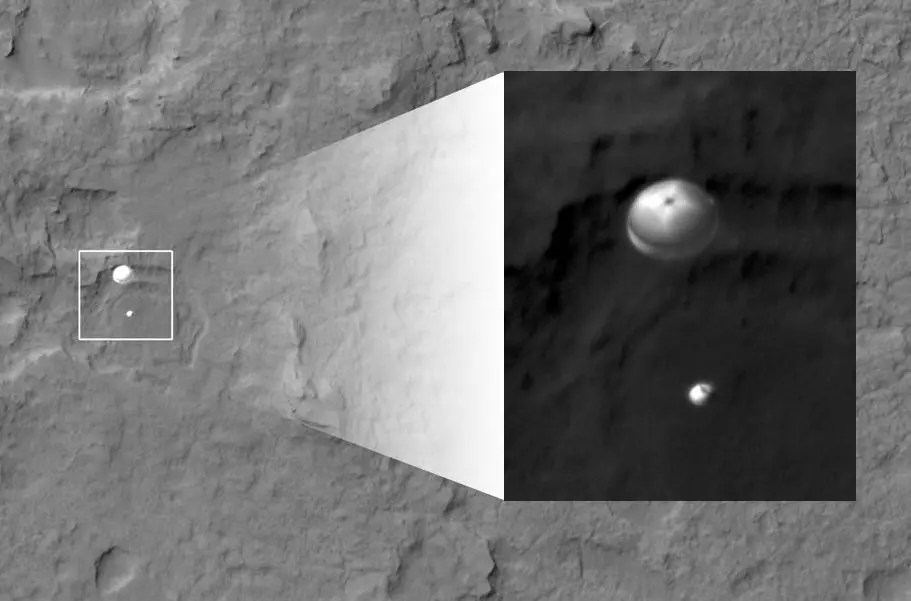
JPL se do amerických přistání na Marsu zapojuje už od roku 1976, když tamní experti ve spolupráci s kolegy z Langleyho výzkumného střediska v Hamptonu (stát Virginia) připravovali dva stacionární landery Viking, které na Marsu přistály s pomocí drahých raketových motorů s měnitelnou úrovní tahu. Pro přistání mise Mars Pathfinder v roce 1997 navrhla JPL něco jiného. Když se lander houpal pod svým padákem, nafouklo se kolem něj několik obřích airbagů.

Zdroj: https://science.nasa.gov/
Trojice brzdících motorů umístěných na polovině délky mezi airbagy a padákem pak svým zážehem zajistila, že sonda zabalená v hroznu nafukovacích airbagů zůstala viset asi 20 metrů nad povrchem, kde došlo k jejímu odhození. Celá sestava se samozřejmě několikrát odrazila (někdy až do výšky 15 metrů), než konečně zastavila.
Tato metoda fungovala tak dobře, že ji NASA uplatnila i v roce 2004 u přistání misí Spirit a Opportunity. Jenže v té době bylo jen pár lokalit na celém Marsu, kde si inženýři byli jistí, že přistávající sondu neohrozí terén obsahující útvary, které by mohly propíchnout airbagy a nebo poslat nafukovací kouli na neřízený sjezd ze svahu. „Dokázali jsme najít sotva tři místa na Marsu, která připadala z hlediska bezpečnosti v úvahu,“ vzpomíná Al Chen z JPL, který sehrál klíčovou roli při přistávacích sekvencích misí Curiosity a Perseverance. Postupně se také zcela jednoznačně ukázalo, že airbagy nebyly využitelné pro rover o velikosti a hmotnosti Curiosity. Pokud tedy NASA chtěla posílat větší sondy do vědecky zajímavějších lokalit, bylo potřeba najít nějakou lepší metodu.

Zdroj: https://science.nasa.gov/
Na začátku nového tisíciletí si inženýři začali pohrávat s myšlenkou „chytrého“ přistávacího systému. Najednou totiž začaly být dostupné nové druhy radarů, které poskytovaly data o rychlosti v reálném čase. Tato informace přitom může významně pomoci sondě řídit její sestup. Bylo také možné využít nové typy motorů k nasměrování sestupu směrem ke specifické oblasti a nebo dokonce provést větší korekce pro vyhnutí se nebezpečné překážce. V tu chvíli se začala formovat základní myšlenka metody Sky Crane. Rob Manning, spolupracovník JPL, začal v únoru 2000 pracoval na prvotním konceptu a dodnes si pamatuje na reakce, které dostal od lidí, kterým projekt ukázal. Viděli tak, že rover je v těchto návrzích umístěn pod plošinou s motory namísto nad ní. „Lidé z toho byli zmatení,“ vzpomíná a dodává: „Předpokládali, že pohonný systém bude vždy pod vámi, jako to vidíte ve starých sci-fi filmech s raketou přistávající na nějaké planetě.“
Manning a jeho kolegové chtěli vzdálenost mezi povrchem Marsu a pohonným systémem zvětšit na maximální možnou úroveň. Kromě zvíření prachu a kamenů mohou přistávací motory vyfoukat pod roverem díru, ze které by také vozítko nemuselo vyjet. A zatímco předešlé mise využívaly lander, z jehož výklopných ramp sjel rover napovrch, umístění přistávacích raketových motorů nad rover znamenalo, že se kola při přistání rovnou dotknou povrchu. V podstatě tak budou fungovat jako přistávací podvozek. Ušetří se tak hmotnost navíc, která by byla zapotřebí pro přistávací plošinu.

Zdroj: https://www.nasa.gov/
Jenže inženýři si na začátku nebyli jistí, jak spustit velký rover na lanech, aby se toto břemeno nezačalo neřízeně houpat. Odborníci se proto podívali, jak tento problém řeší obří pozemské nákladní vrtulníky, kterým se mimochodem také přezdívá nebeské jeřáby (sky cranes). Záhy poznali, že přistávací systém musí být schopen zaznamenat počínající kývání a řídit jej. „Všechny tyto nové technologie vám dávají šanci dostat se na správné místo na povrchu,“ popisuje Chan. A co je nejlepší? Tento koncept by mohl být využit i pro ještě větší kosmické lodě – nejen na Marsu, ale i jinde ve Sluneční soustavě. „Kdybyste v budoucnu chtěli službu doručování užitečného nákladu, mohli byste tuto architekturu snadno použít ke spuštění na povrch Měsíce nebo jinam, aniž byste se pohonným systémem dotkli povrchu,“ završil Manning.
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/wp-content/uploads/2016/07/pia14839.jpg
https://www.nasa.gov/wp-content/uploads/2024/08/2-ksc-2011-7087large.jpg
https://www.nasa.gov/wp-content/uploads/2024/08/e1a-pia15978-hirise-captures-curiosity-already-in-pj.jpg?w=911
https://science.nasa.gov/wp-content/uploads/2024/08/5277460495-c6d046d5a9-o.jpg
https://science.nasa.gov/wp-content/uploads/2024/03/44523_PIA23466.jpg
https://www.nasa.gov/wp-content/uploads/2024/08/e3a-jubilant-reaction-shot-with-al-chen-already-in-pj.jpg?w=2000




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
5. srpna 20125 byla poprvé v praxi využita nová a velmi odvážná metoda
Tak si na tu metodu pockame este priblizne 18 tisic rokov. No ja sa asi toho uspechu uz nedozijem…
Dušan Majer.
S tebou mne bavi svet… :}
Děkuji za upozornění, překlep opraven.
Pouzi tlacitko na hlasenie chyb, nepresnosti a pripomienok.