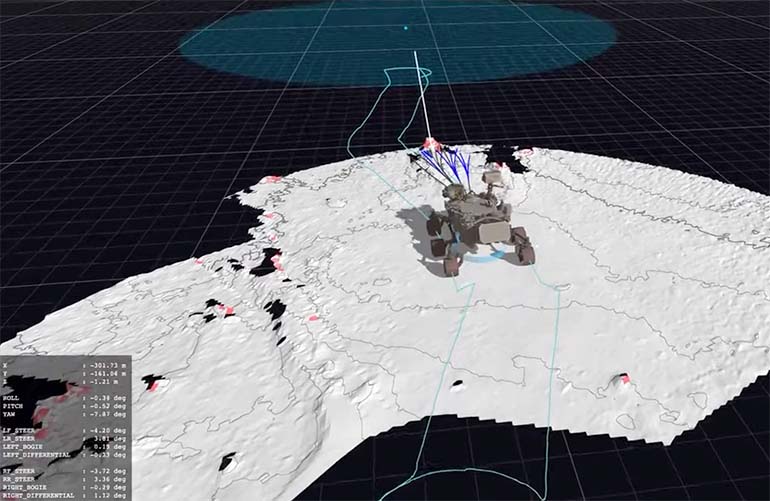
Zhruba jen třetinu času, který by potřebovaly ostatní americké marsovské rovery, trvalo vozítku Perseverance, než si našlo cestu zhruba půl kilometru širokým polem balvanů. Ačkoliv plánovači mise vybírají obecnou cestu vozítka, rover Perseverance zvládl sám identifikovat přesnější trajektorii průjezdu tímto polem, které dostalo přezdívku „Snowdrift Peak“. Využilo k tomu AutoNav, systém pro autonomní řízení, který pomáhá zkrátit dobu přejezdu mezi vědecky atraktivními lokalitami. Perseverance již má na svém kontě několik rychlostních rekordů mezi marsovskými rovery. Schopnosti systému AutoNav byly podrobněji představeny v článku, který v červenci vyšel v odborném časopise Science Robotics.
Tyler Del Sesto pracoval na softwaru pro AutoNav sedm let. Občas měl pocit, že překážky, které inženýři staví do cesty pozemskému dvojčeti roveru Perseverance, tedy vozítku OPTIMISM, během jeho testů na Jet Propulsion Laboratory, byly až nereálně náročné. Svůj názor však změnil, když rover Perseverance přijel k lokalitě Snowdrift Peak. „Šlo o mnohem hustěji zaplněné území, než cokoliv, s čím zatím Perseverance přišla do styku. Bylo to doslova zasypané těmito velkými kameny,“ popisuje Del Sesto, zástupce vedoucího plánovače jízdy roveru Perseverance z JPL v jižní Kalifornii a dodává: „Nechtěli jsme to objíždět, protože by nám to trvalo týdny. Více času věnovaného jízdě znamená méně času na vědu, takže jsme to vzali přímo skrz.“
Zdroj: https://mars.nasa.gov/
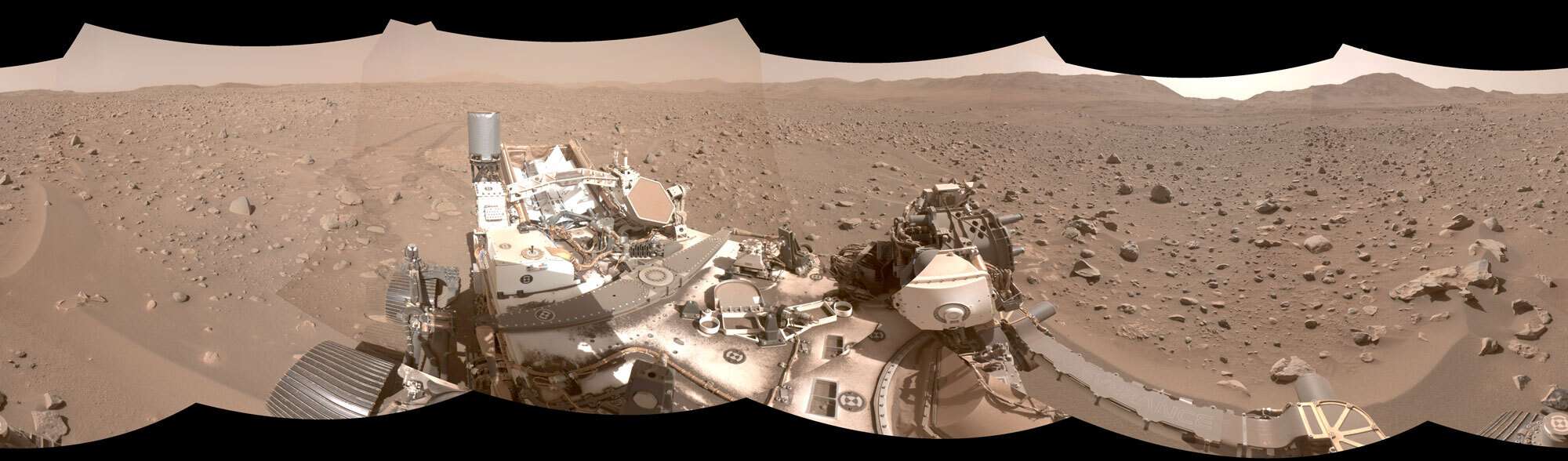
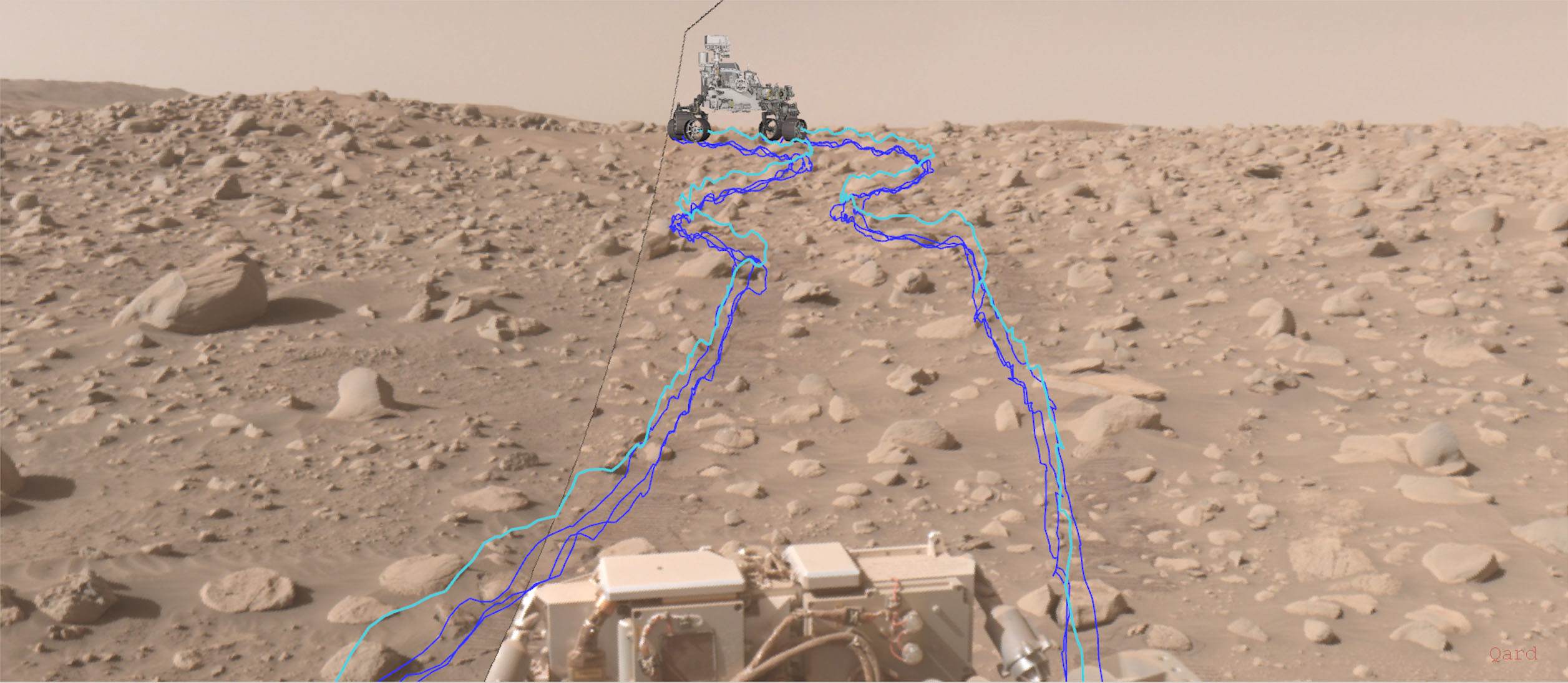
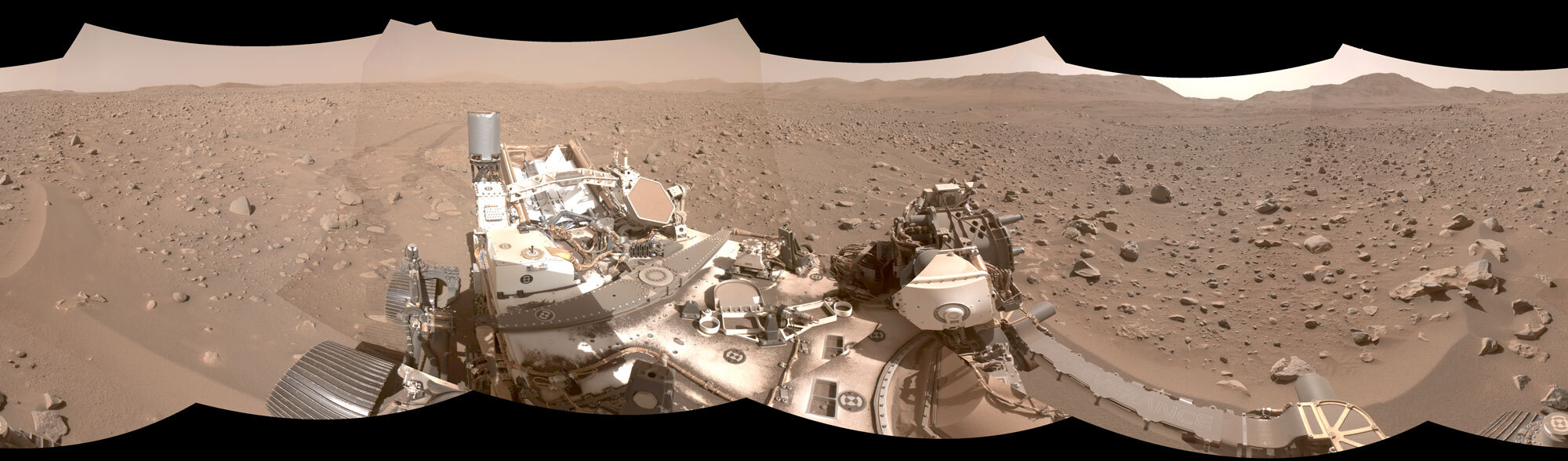
26. června rover Perseverance vjel na východní okraj Snowdrift Peak. Včetně dvou zastávek u balvanů, které chtěl vědecký tým prozkoumat, by jeho jízda téměř vzdušnou čarou napříč Snowdrift Peak měřila 520 metrů. Když 31. července rover opustil západní okraj pole balvanů, měl v této oblasti najeto 759 metrů. Většina z metrů navíc jde na vrub objíždění překážek, které nejsou vidět na snímcích z oběžné dráhy používaných pro plánování trasy. Právě v těchto případech musel zakročit systém AutoNav. „Pokud nebudeme započítávat soly (marsovské dny) věnované vědeckému výzkumu, pak průjezd přes Snowdrift Peak trval pouze šest solů autonomní jízdy. Je to pravděpodobně o 12 solů rychlejší, než by taková cesta trvala roveru Curiosity,“ vysvětluje Del Sesto a dodává: „Samozřejmě, všichni v týmu moc dobře vědí, že jsme se k takovým parametrům dostali jen díky tomu, že stojíme na ramenou obrů. Byly to právě rovery Sojourner, Spirit, Opportunity a Curiosity, které nám vyšlapaly cestu.“
Zdroj: https://mars.nasa.gov/
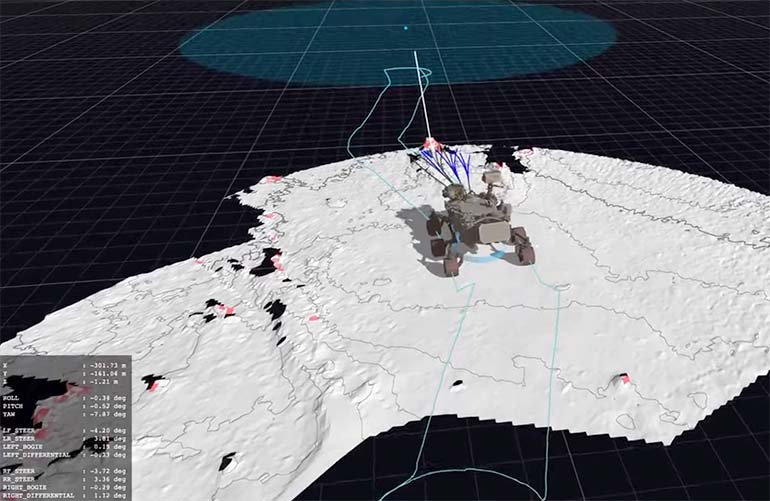
Některé formy „křemíkového navigátora“ byly používány již u prvního marsovského vozítka, které se v roce 1997 potřebovalo vyhnout kamenům. V té době potřeboval rover Sojourner o velikosti mikrovlnné trouby zastavit po každých 13 ujetých centimetrech, aby jeho počítačový mozek zhodnotil nové prostředí a mohl pokračovat dál. Další marsovská vozítka – Spirit a Opportunity o velikosti golfového vozíku (na Marsu přistála v roce 2004) – už dokázala ujet vzdálenost až půl metru, než také musela zastavit a promyslet další „kroky“. Rover Curiosity, který přistál na Marsu v roce 2012, nedávno dostal softwarovou aktualizaci, která mu má pomoci zlepšit rozhodování při jízdě. Ovšem Perseverance má v rukávu několik trumfů. Díky častěji snímkujícím kamerám může rover rychleji fotit své okolí a díky dodatečnému počítači, který výhradně slouží ke zpracování snímků, zvládá rover zpracovávat plán své cesty v reálném čase. Odpadá tak nutnost zastavit, aby si vozítko udělalo pauzu na rozmyšlenou.
„Naše vozítko je perfektním příkladem starého rčení, že víc hlav víc ví (v originále „dva mozky jsou lepší než jeden“ – pozn. překl.),“ říká hlavní autorka zmíněného odborného článku, která je hlavní inženýrkou robotických operací na JPL a dodává: „Perseverance je první rover, který má dva spolupracující počítačové mozky, což mu umožňuje dělat rozhodnutí za jízdy.“ Tyto autonomní schopnosti umožnily roveru Perseverance stanovit i nové rekordy v oboru jízdy po Marsu. Jmenovat můžeme třeba rekordní vzdálenost ujetou za jediný den (347,7 metrů), nebo nejdelší jízdu bez lidského zásahu (699,9 metrů). Tyto rekordy však byly dosaženy v době, kdy rover projížděl relativně rovinatým terénem dna kráteru Jezero, kde v cestě nepřekážely velké balvany a nebo další krátery. Právě proto nedávná navigace skrz balvany posetou oblast Snowdrift Peak udělala dojem i na inženýry, kteří plánují cesty roverů.
Teď když je pole balvanů v pomyslném zpětném zrcátku Perseverance, čeká na rover další nelehká výzva související s jízdou. Rover zahájil 7. září svou čtvrtou vědeckou kampaň, když přejel Mandu Wall, zvlněný hřbet oddělující dvě geologické oblasti nacházející se podél vnitřního západního okraje kráteru Jezero. Měření z oběžné dráhy Marsu ukazují, že tato oblast je vyplněna uhličitany, které by mohly poskytnout neocenitelné údaje o historii obyvatelného prostředí na Marsu. Teoreticky se tu mohly také zachovat známky dávného mikrobiálního života. Samozřejmě jen za předpokladu, že v této oblasti nějaký existoval.
Zdroj: https://www.therobotreport.com/
„Doba, kdy se vědecký tým roveru mohl dívat na útvary rýsující se na marsovském horizontu a uložit si je pro budoucí úvahy, je pryč,“ říká Ken Farley, vědec zapojený do projektu Perseverance z Caltechu v Pasadeně a dodává: „Musíme být ve střehu, protože autonomní schopnosti Perseverance mohou způsobit, že něco, co vidíme jeden sol v dálce, bude při dalším solu přímo před námi – nebo dokonce za námi.“ S novými možnostmi kosmického průzkumu přichází i nové výzvy – rozlámaný kamenný podklad, velké svahy, či písečné duny, ale i malé impaktní krátery. Tak vypadá blízká budoucnost roveru Perseverance. „Tento nový terén zcela určitě nás i AutoNav několikrát překvapí svými překážkami,“ říká Mark Maimone, zástupce vedoucího týmu robotických činností roveru Perseverance a dodává: „Ale tak už to vědecky atraktivních lokalitách bývá. My jsme připraveni.“
Přeloženo z:
https://mars.nasa.gov/
Zdroje obrázků:
https://mars.nasa.gov/layout/mars2020/images/PIA23764-RoverNamePlateonMars-web.jpg
https://mars.nasa.gov/system/news_items/main_images/9482_PIA26072-web.jpg
https://mars.nasa.gov/system/internal_resources/details/original/1698_PIA26071-web.jpeg
https://www.therobotreport.com/…/nasa-perseverance-autonav-featured-web.jpg






{kind=link}
{kind=link}
{kind=link}
{kind=link}