Na odlehlém místě ve vesmíru poblíž jižního pólu Měsíce, leží pozůstatky modulu Čandraján-2. Memento vzletných ambicí indického lunárního programu a obtíží s jejich dosažením už jen pohřbívá měsíční prach. Série Čandraján (Chandrayaan) má za sebou řadu úspěchu, ale ne vždy šlo vše podle představ. Pamětihodné je zejména neúspěšné přistání modulu Vikram s vozítkem na palubě. Ve výšce 2,1 km nad povrchem Měsíce v jeho jižní oblasti došlo ke ztrátě spojení, které už se nepodařilo obnovit. Pozdější snímky NASA objevily nové krátery a tak je velmi pravděpodobné, že se lander na povrch dostal, ale větší, než plánovanou rychlostí. Výsledkem byla částečně ztracená mise. Proč pouze částečně? Součástí byla totiž též sonda, která úspěšně do dnešních dnů krouží okolo našeho souputníka, byť nemáme k dispozici moc dat, která sbírá. Téměř ihned po neúspěšném přistání agentura ISRO oznámila, že se o výsadek pokusí znovu v rámci mise Čandraján-3. Čas utekl doslova jako voda a první startovací okno se otevírá už 14. července a potrvá do 25. července. Co tedy bude úkolem třetí indické výpravy k šedému světu, který má stále svá tajemství? Zde je vše, co potřebujete vědět o zatím nejambicióznější lunární misi Indie.
Není žádným tajemstvím, že Čandraján-3 z velké části vychází z předešlé výpravy a je to vidět na první pohled. Navíc podobnost nezůstala jen u vizuální stránky, ale též názvy přistávacího modulu a lunárního vozítka byly převzaty. Z velké většiny bylo použito též stejné vědecké vybavení. Tato mise je však výsledkem nasbíraných zkušeností ze všech předešlých misí. Skládá se primárně z přistávacího modulu (lander) a vozítka (rover). Další částí je pohonný modul, ale o tom až později. Sestava bude vypuštěna raketou LVM-3 (dříve známá jako GSLV Mk-3) z kosmodromu Šríharikota. Jde o nejsilnější indický nosič, který je v současnosti výkladní skříní tamní raketové techniky. Začněme tedy tím, že si Čandraján-3 podrobně popíšeme.
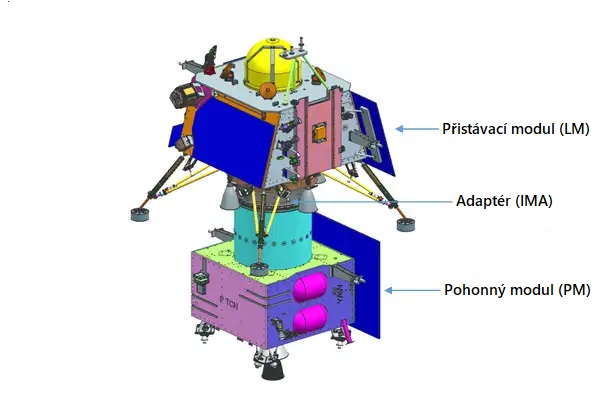
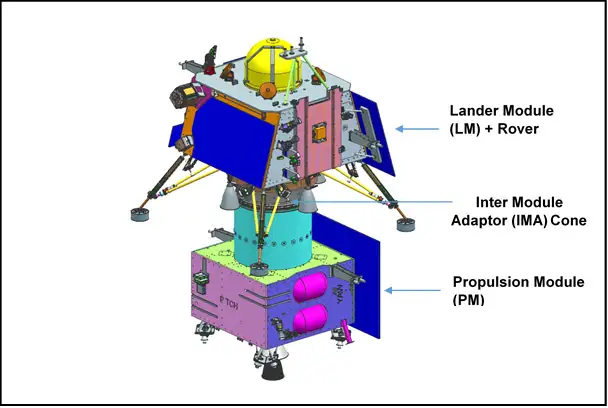
Celek se skládá ze třech hlavních částí. Nejvýraznější je samozřejmě přistávací modul, který má ve svých útrobách menší lunární vozítko. Sestavu pak doplňuje pohonný modul s jedním vědeckým přístrojem, u kterého začneme.
Pohonná část
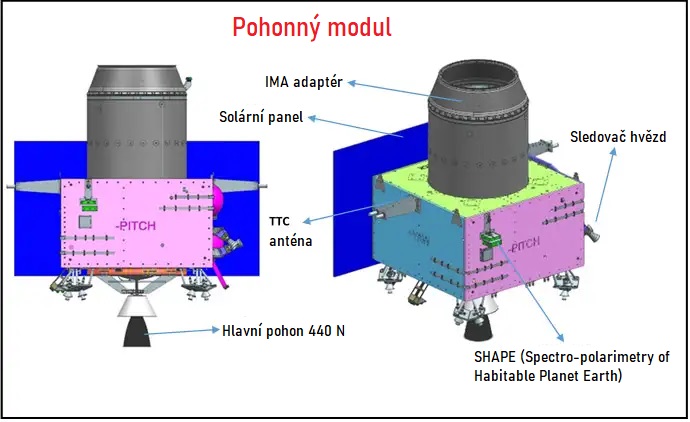
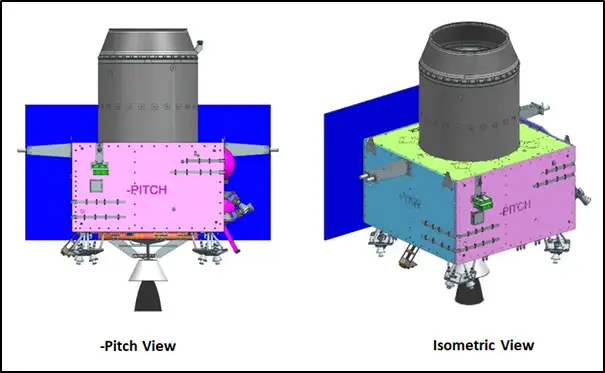
Plán počítá s tím, že pohonný modul dopraví a usadí sestavu na přibližně 100 km kruhovou dráhu okolo Měsíce, krom toho po celou cestu zajistí dodávku elektrické energie. Na těle má solární panely a pro svůj tvar je celkem snadno rozpoznatelný. Jde o krychli s válcem, na který je umístěn lander. Na opačné straně je pohonný systém, který se skládá z hlavního motoru s tahem ve vakuu 440 N na kapalné pohonné látky. Doplňují jej menší motory pro řízení orientace. Pohonný modul má na jedné straně rozkládací křídlo solárních panelů, které dodá elektrický výkon až 758 W a po celou dobu mise bude komunikovat s Indian Deep Space Network (IDSN). Pro manévry na oběžné dráze je ISRO domluveno též s agenturou ESA, která souhlasila s podporou prostřednictvím komunikační sítě ESTRACK. Profil letu je jednoduší než v minulosti a to jak z hlediska orbitálních manévrů na oběžné dráze Země, tak během přeletu na Měsíc.
Na tomto modulu bude pouze jeden přístroj, spektropolarimetrický zobrazovač (Spectro-polarimetry of Habitable Planet Earth, SHAPE) pro pozorování Země z oběžné dráhy Měsíce. Cílem je otestovat metodu pozorování obyvatelných exoplanet v odraženém světle, sledovat rozptylové procesy na kapkách v mracích, ledových krystalech atd. a přitom generovat charakteristickou polarizaci světla, která umožňuje vyvodit závěry o složení atmosféry planety. I s palivem váží modul 2148 kg.
Lander (Vikram)

Již během příprav na misi Čandraján-2 existovaly plány na vylepšení přistávacího modulu, ale nemohly být realizovány kvůli blížícímu se datu startu. Byly tedy aplikovány až na misi s pořadovým číslem 3. Především přistávací nohy modulu byly zesíleny tak, aby bezpečné přistání bylo možné i při vyšší rychlosti. Přistávací modul má také pouze čtyři motory o tahu 800 N s možností regulace tahu pomocí škrtící klapky. Na rozdíl od Chandraján-2, kde měl modul pět motorů také o tahu 800 N. Čtyři měly též řiditelný tah, ale pátý středový motor měl tah bez možnosti úpravy. Jako palivo poslouží monomethylhydrazin a směs 97% oxidu dusičitého a 3% oxidu dusnatého, také známého jako MON3, jako okysličovadlo. Kromě toho je zde osm motorů pro řízení orientace, každý s tahem 58 N.
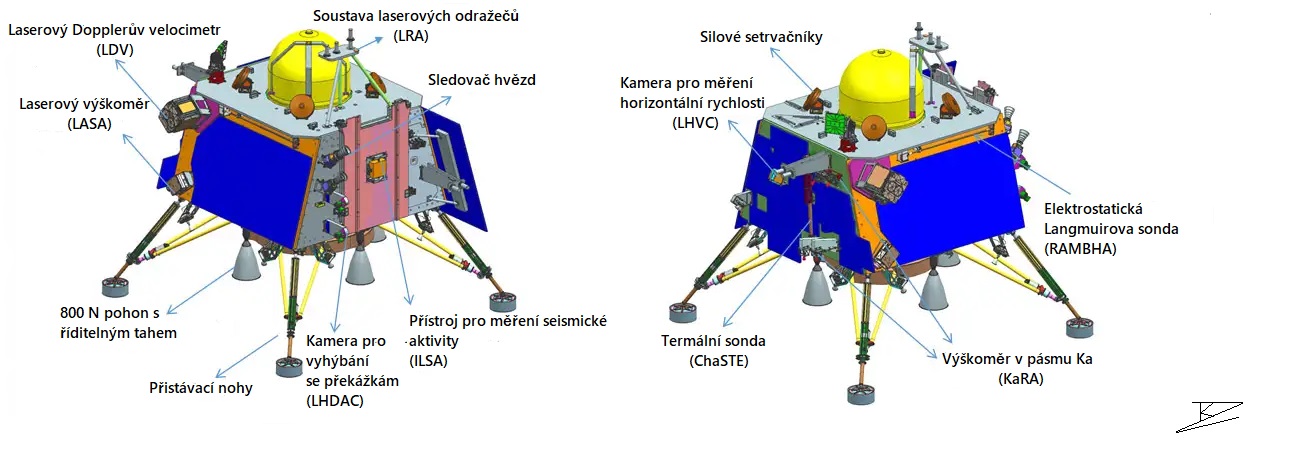
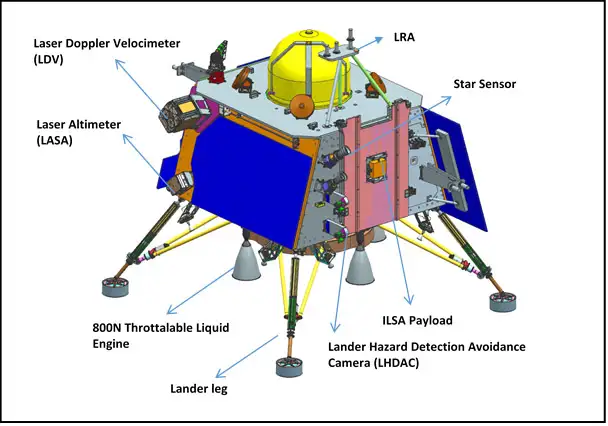
Přistávací modul, včetně roveru a pohonných hmot váží 1752 kg, rover sám váží 26 kg. Modul má několik redundantních přístrojů pro měření vzdálenosti od povrchu a pro vyhýbání se překážkám v závěrečné fázi klesání. Také software byl vylepšen ve srovnání s Chandrayaan-2. Jde o nejsložitější část celé sestavy a najdeme na něm toto vybavení:
- Akcelerometr v laserem měřené inerciální soustavě (LIRAP)
- Výškoměr v pásmu Ka (KaRA)
- Kamera pro identifikaci polohy přistávacího modulu (LPDC)
- Kamera pro vyhýbání se překážkám s ovládacím softwarem (LHDAC)
- Laserový výškoměr (LASA)
- Laserový Dopplerův velocimetr (LDV)
- Kamera pro měření horizontální rychlosti (LHVC)
- Senzor hvězd
- Sklonoměr (Inclinometr)
- Pozemní kontaktní senzory
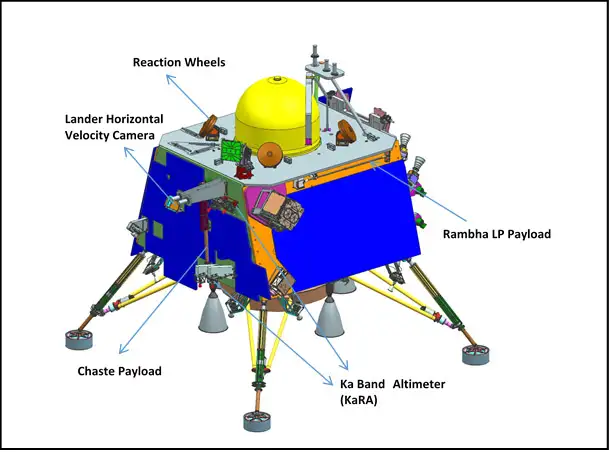
Pro řízení stability má přistávací modul čtyři silové setrvačníky (Reaction wheel). Nezaměnovat s gyroskopy, jde totiž o dvě rozdílné věci. Najdeme je v každém rohu na horní straně. Každý kus má moment hybnosti 10 Nms. Kromě toho je zde osm motorů pro řízení polohy, každý s tahem 58 N. Zesílené přistávací nohy jsou navrženy tak, aby absorbovaly vertikální zbytkovou rychlost až 2 m/s a horizontální rychlost až 0,5 m/s.
Přistávací modul má dva solární panely, z nichž každý se otáčí kolem jedné osy, které mohou být v mezích zarovnány se Sluncem díky své severojižní orientaci a poskytují elektrický výkon až 738 W. Přistávací modul funguje i jako rádiová retranslační stanice pro rover. Běžně bude komunikovat přímo s indickou komunikační sítí na Zemi. Pokud se ale vyskytnou problémy, další možností bude využít orbiter Chandrayaan-2, který může také sloužit jako přenosová družice pro přistávací modul. Rover je ovšem schopen komunikovat pouze s přistávacím modulem. Pohonná část nebude fungovat jako stanice pro přenos dat z povrchu, protože na to není vybavena. Veškerá komunikace probíhá přes pásmo X. Krom užitečného vybavení je lander vybaven také těmito čtyřmi vědeckými přístroji:
- Radio Anatomy of Moon Bound Hypersensitive ionosphere and Atmosphere (RAMBHA): Elektrostatická (Langmuirova) sonda. Rádiová anatomie hypersenzitivní ionosféry a atmosféry vázané na Měsíc pomocí přístroje Langmuir Probe (LP). Cílem je měření hustoty plazmatu (iontů a elektronů) v blízkosti povrchu a jeho změn v čase.
- Chandra’s Surface Thermo physical Experiment (ChaSTE): Chandrův povrchový termofyzikální experiment. Cílem je provádět měření tepelných vlastností měsíčního povrchu v blízkosti polární oblasti.
- Instrument for Lunar Seismic Activity (ILSA): Přístroj pro měsíční seismickou aktivitu. Cílem je měřit seismicitu kolem místa přistání a vymezit strukturu měsíční kůry a pláště.
- LASER Retroreflector Array (LRA): Soustava laserových odražečů. Jedná se o pasivní experiment pro pochopení dynamiky měsíčního systému. Za tímto experimentem stojí NASA.
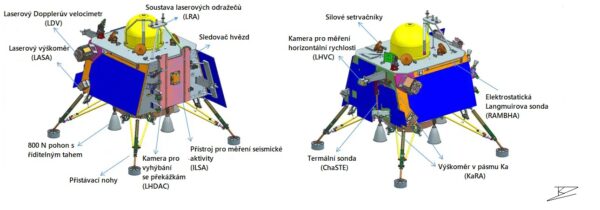
Popis částí přistávacího modulu. Obrázek: ISRO, úpravy Karel Zvoník
Lunární rover (Pragyan)
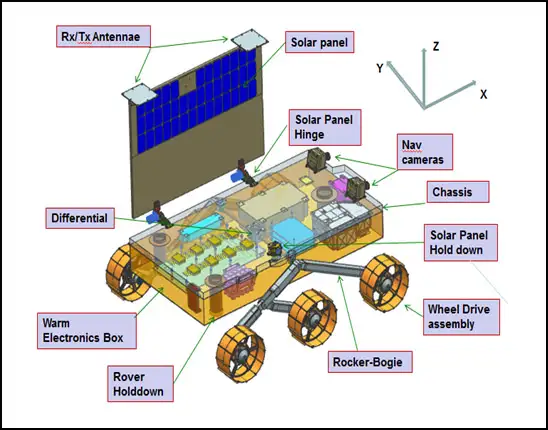
Vozítko o hmotnosti okolo 26 kg na Měsíc cestuje v komoře uvnitř přistávacího modulu. Komora je uzavřena dvoudílnými dveřmi, která se otevírají směrem dolů a po přistání slouží jako šikmá rampa, po níž vozítko vyjede na měsíční povrch. Uvnitř komory je rover přichycen a uvolněn bude až po přistání. Energii dodává vlastní rozevíratelný solární panel, na jehož vrcholu je též anténa. Vozítko má šest samostatně poháněných neřiditelných kol se stejnosměrnými elektromotory. Změn směru jízdy se dosahuje regulací rychlosti, podobně jako například u tanků a potažmo všech pásových vozidel. Stejný princip používá i kompaktní nakladač, známý spíše pod přezdívkou Bobcat. Podvozek je založen na principu dvounápravové jednotky, přičemž dlouhé rameno hlavního vyvažovacího nosníku je vpředu ve směru jízdy. To umožňuje kolům udržovat stálý kontakt se zemí i na nerovném povrchu. Stejný způsob zavěšení kol úspěšně používá NASA na svých vozítkách pro Mars. Tento druh zavěšení se nazývá Rocker-bogie. Očekávaná rychlost je asi 1 cm za sekundu. Pohyb je řízen na dálku příkazy z řídícího střediska. Tým zadá povely a odešle je na vozítko, které následně zadané příkazy provede. K navigaci terénem poslouží „oči“ roveru – dvojice navigačních kamer, ze kterých bude tým též dostávat informace o okolí vozítka. Pomocí kamer a dalšího vybavení bude tým schopen též vytvářet 3D mapu povrchu, která poslouží třeba k přesnému určení cesty po povrchu.
Rover obsahuje dva následující vědecké přístroje:
- LASER Induced Breakdown Spectroscope (LIBS): Laserem indukovaný rozkladný spektroskop pro kvalitativní a kvantitativní analýzu prvků přítomných na Měsíci. Dokáže odvodit chemické a mineralogické složení pro zvýšení našeho porozumění měsíčního povrchu
- Alpha Particle X-ray Spectrometer (APXS): Rentgenový spektrometr alfa částic pomůže určit elementární složení (hořčík, hliník, křemík, draslík, vápník, titan, železo) měsíční půdy a hornin kolem místa přistání na Měsíci.
Základní parametry:
- Rozměry: 0,9 × 0,75 × 0,85 m
- Výkon: 50 W
- Rychlost pohybu: 1 cm/s
- Plánovaná délka mise: ≤14 dní (jeden lunární den)
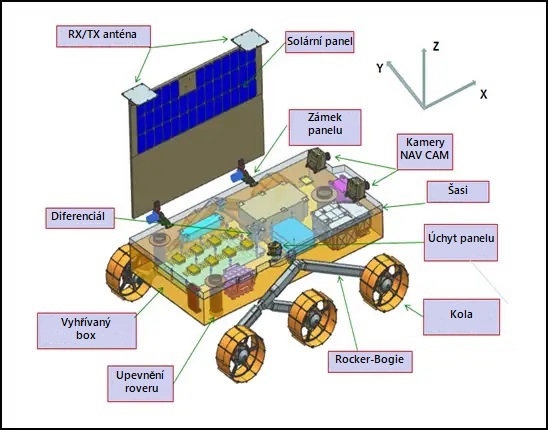
Popis vozítka. Obrázek: ISRO, úprava Karel Zvoník
Specifikace mise
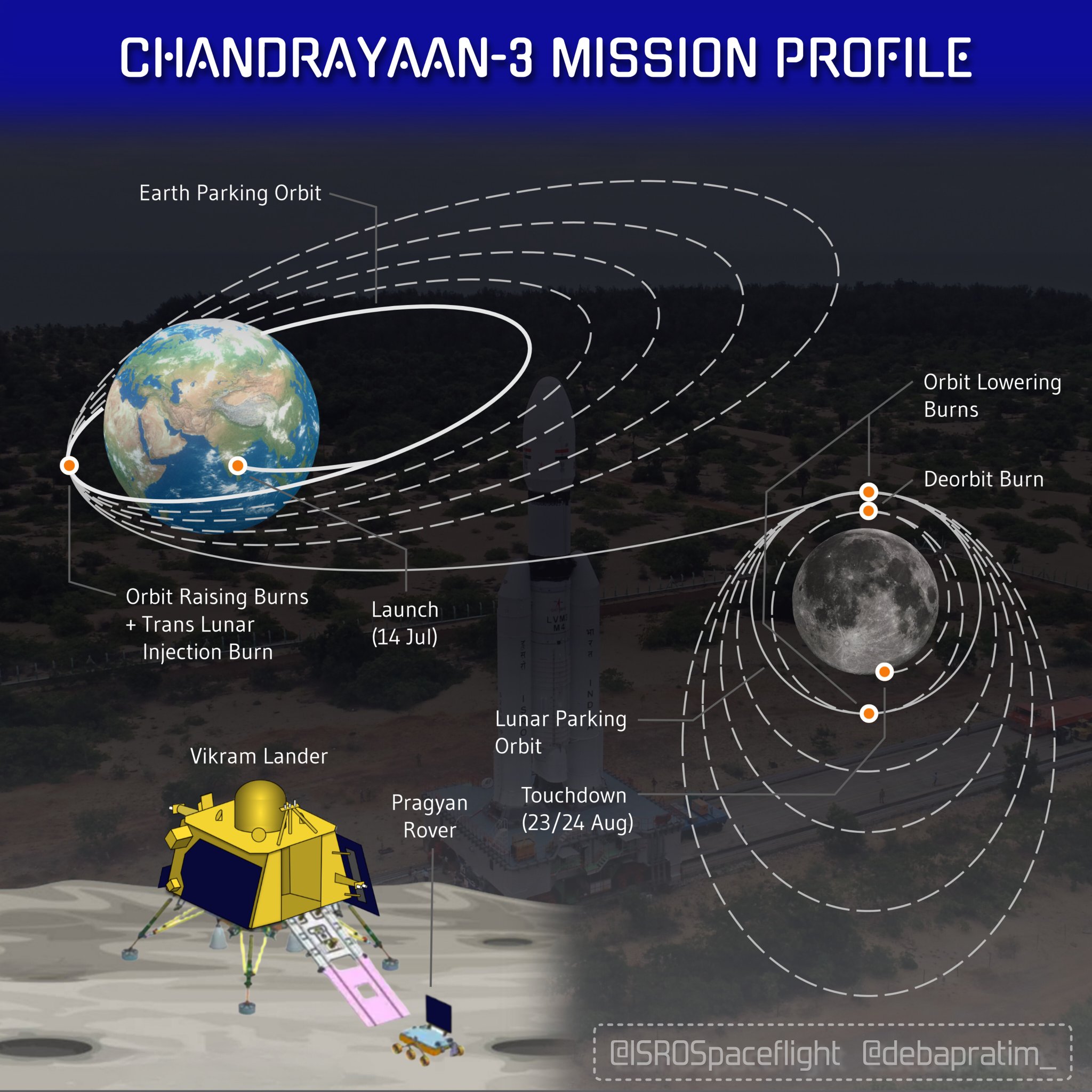
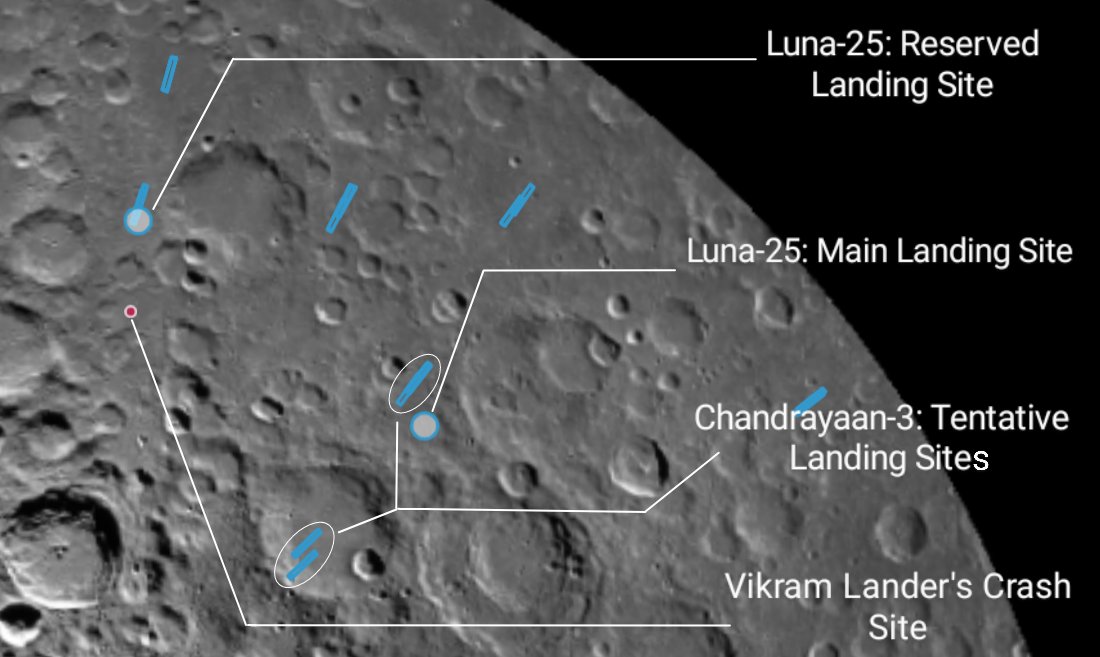
Startovní okno se otevírá 14. července a potrvá do 25. července. Datum startu je stanoveno na 14. července 11:05 našeho času. Z rampy číslo dva sestavu vynese raketa LVM-3 na eliptickou parkovací dráhu Země (EPO) o rozměrech 170 x 36500 km. Poté bude provedeno několik plánovaných zážehů, které přesunou Čandraján-3 k Měsíci. Přeletová fáze bude trvat zhruba měsíc. K přistání by mělo dojít 23 nebo 24. srpna. Místo plánovaného přistání se nepatrně liší od předešlého a to hlavně kvůli tomu, že orbiter na dráze kolem Měsíce z mise Čandraján-2 podrobně snímal místo zamýšleného přistání a ze získaných dat pak byla vybrána o něco vhodnější oblast. Cílem je samozřejmě oblast u jižního pólu Měsíce. Konkrétně 32,348126° východní selenografické délky 69,367621° jižní selenografické šířky mezi krátery Manzinus C a Simpelius N. Oblast leží přibližně 625 km od jižního pólu!
Vybrané datum znamená jediné. Pokud ruská Luna-25 skutečně odstartuje 11. srpna, pak nás možná čeká dvojice přistání ve stejný den a souboj o to, kdo přistane v oblasti poblíž Jižního pólu jako první. Oba automaty od sebe bude dělit na povrchu asi jen 120 km. To však není vše. V srpnu je plánován též japonský start s modulem SLIM (Smart Lander for Investigating Moon). Takže je rozhodně na co se těšit.
Plánovaná životnost roveru i modulu je jeden lunární den, tedy asi 14 dní. Vozítko i přistávací platforma mohou přejít do módu hibernace a proto není vyloučené ani prodloužení mise, pokud vybavení přežije dlouhou měsíční noc. Celková hmotnost při startu činí 3900 kg. Pro zajímavost uvedu, že výsledky z této mise se také odrazí na plánované indicko-japonské misi na Měsíc LUPEX (Lunar Polar Exploration Mission), jejímž cílem má být taktéž jižní pól. S realizací se počítá v roce 2025 a svými přístroji přispějí také agentury ESA a NASA.
(Ne)známý Měsíc
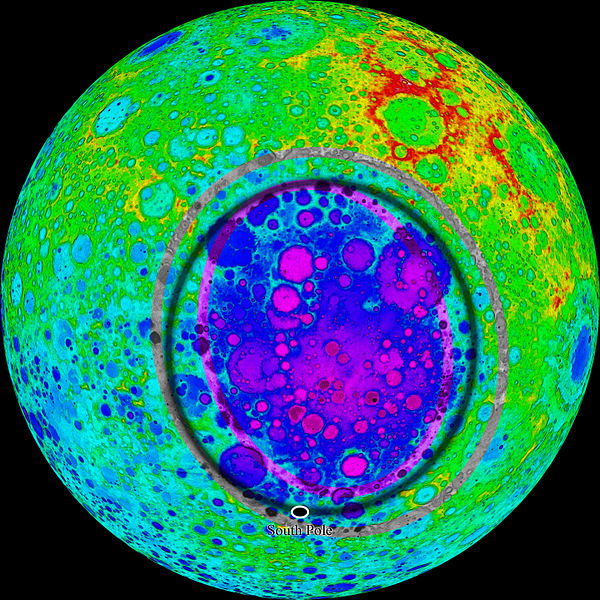
Proč je ale v posledních letech takový zájem právě o měsíční jižní pól. Většina z Vás asi ví, že zde byly nalezeny stopy vody (led) na dně kráterů a potencionálně se jedná o vhodné místo pro založení lidské kolonie někdy v budoucnu. Je to právě kvůli zásobám ledu, který by mohl sehrát klíčovou roli. Led se však nachází i na severním pólu a výzkum ukazuje, že jeho množství je dokonce srovnatelné. Rozdíl tedy není tak velký, jak se v minulosti předpokládalo. Méně známý fakt je ten, že tato oblast je zajímavá též z geologického hlediska. Jižní pól totiž leží na okraji impaktní pánve South Pole-Aitken, což je v podstatě obrovský kráter. Vědci se domnívají, že na jeho okraji nebo jeho blízkosti by mohl být dostupný materiál z hlubších míst kůry a svrchního pláště Měsíce.
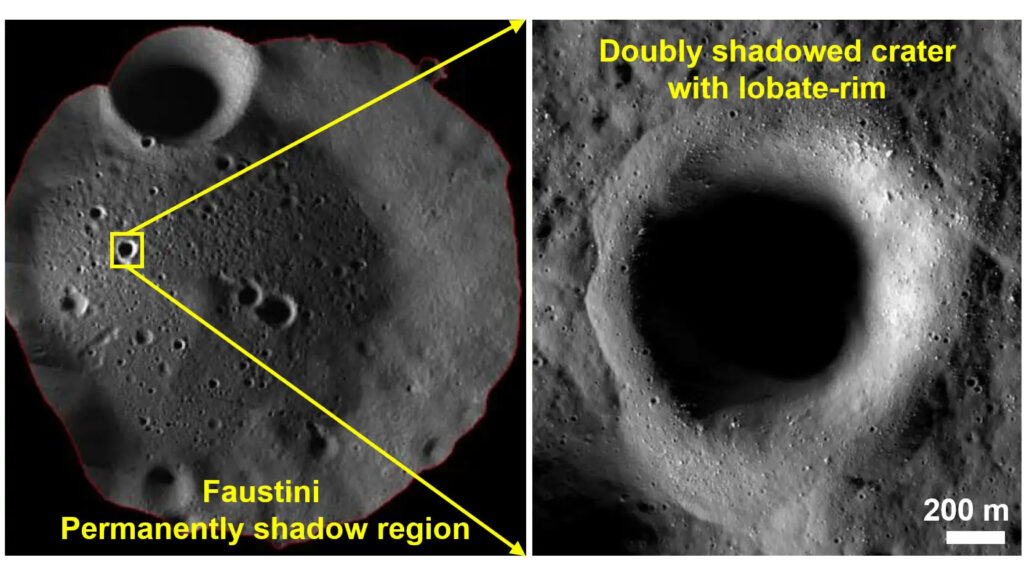
Důvod, proč je vlastně jižní oblast tak oblíbená pro průzkum, leží v minulosti. Panuje totiž mylná představa o existenci hor, které jsou vždy osvětlené Sluncem a tato myšlenka napomohla popularizovat mylně představu, že jižní pól je místem věčného světla. Dalším důvodem je, že jižní oblast byla hůře a méně zmapována než severní. A to dokonce i v dobách éry misí Apollo. Region dostal přezdívku Luna incognita (latinsky Neznámý Měsíc). Prakticky až sonda Clementine odhalila mnoho nových informací této oblasti. Dnes už víme, že jižní pól má větší plochu v trvalém stínu kde panují nižší teploty, takže se předpokládá, že má více vodního ledu. Rozdíl v trvale zastíněné ploše mezi oběma póly ale není tak velký, jak se původně myslelo. Skutečný poměr je asi 1,25:1. Dalším významným skokem byla mise NASA LCROSS, která měla být původně určená k hledání ledu v obou regionech. Tedy v jižní i severní části. Nakonec se však sonda zaměřila pouze na jižní oblast a spektrometr potvrdil přítomnost vody, což mělo za následek soustředění dalších mísí v této oblasti. Na konci 90. let se tak stal jižní region Měsíce preferovanou oblastí pro průzkum díky kombinaci faktorů včetně skutečnosti, že byl v minulosti hůře zmapován. Dodnes však neexistuje jediný přesvědčivý důkaz, že by byl skutečně lepší destinací než severní pól.
Hlavní cíle mise Čandraján-3 jsou následující:
- Demonstrovat bezpečné a měkké přistání na měsíčním povrchu.
- Demonstrovat jízdu vozítka po měsíčním povrchu.
- Provést všechny vlastní vědecké experimenty přítomné na palubě landru, vozítka a pohonného modulu.
Čandraján-3 je přitom nízkorozpočtová mise. Náklady spojené se sondou byly vyčísleny na 85 mil. dolarů a raketa pak přidá dalších zhruba 60 milionů. Přistání na Měsíci představuje pro Indii jednu z priorit. Mise Čandraján-1 objevila na jižním pólu vodu a výzkum měl být rozšířen následujícím výsadkem, který však dopadl neúspěšně. Proto vznikl nástupce s číslem tři, aby se pokusil o to, co se v předešlém případě nepovedlo. Díky selháním dalších států v nedávné minulosti má však Indie stále šanci přistát v oblasti jižního pólu jako první. To by také znamenalo, že by se stala teprve čtvrtou zemí, po SSSR, USA a Číně, které se povedl výsadek na Měsíci. Úkol to však není jednoduchý, protože jak známo, vesmír chyby neodpouští a čím složitější mise, tím větší riziko selhání.
Zdroje informací:
https://www.isro.gov
https://en.wikipedia.org
https://www.isro.gov.in
https://nssdc.gsfc.nasa.gov
https://kosmonautix.cz
Zdroje obrázků:
https://akm-img-a-in.tosshub.com
https://www.isro.gov.in
https://www.isro.gov.in/medi.jpg
https://pbs.twimg.com
https://www.isro.gov.in
https://www.isro.gov.in
https://www.isro.gov.in
https://pbs.twimg.com
https://pbs.twimg.com
https://upload.wikimedia.org




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Výborný počtení k ranní kávě,děkuji!Teď už jen zbývá držet palce,ať se to Indii podaří!
Děkuji za milá slova. Ty zase dělají radost k ranní kávě mně.
Zdravím. Díky za článek, dost se na tuto misi těším. Koukám, že lunární vozítko má název Pragyan, je tam snad nějaká souvislost s naším hlavním městem? Asi ne, co? V sanskrtu to znamená Intuice. Škoda, nejdřív jsem si myslel, že to znamená Pražan 🙂
Ještě poznámka k termínu mise. V odstavci Specifikace mise je chybně uveden měsíc startovního okna jako červen. Ostatní chyby, ze kterých mě ráno rozbolely oči, jsou už naštěstí opravené 😉
Nice and informative article Love and Respect from India
I am surprised that we have readers even beyond our borders. Thanks for the kind words.
Díky za překlad textu i grafiky. Škoda, že se ISRO zřejmě rozhodla nerozlišovat oficiálně Vikram a Pragyan 1 a 2. Jasně, máme Chandrayaan 2 a 3, nicméně lander a rover jsou samostatné kusy. Ten hrozící společný termín přistání Luny 25 a Vikramu 2 trochu připomíná závod mezi Lunou 15 a Apollem 11, kdo doveze první šutry z Měsíce. Naštěstí se Luna 15 rozflákala o povrch, takže to vyšlo na tu lepší část světa 🙂
Výborný počtení k ranní kávě,děkuji!Teď už jen zbývá držet palce,ať se to Indii podaří!
Děkuji za milá slova. Ty zase dělají radost k ranní kávě mně.
Zdravím. Díky za článek, dost se na tuto misi těším. Koukám, že lunární vozítko má název Pragyan, je tam snad nějaká souvislost s naším hlavním městem? Asi ne, co? V sanskrtu to znamená Intuice. Škoda, nejdřív jsem si myslel, že to znamená Pražan 🙂
Ještě poznámka k termínu mise. V odstavci Specifikace mise je chybně uveden měsíc startovního okna jako červen. Ostatní chyby, ze kterých mě ráno rozbolely oči, jsou už naštěstí opravené 😉
Nice and informative article Love and Respect from India
I am surprised that we have readers even beyond our borders. Thanks for the kind words.
Díky za překlad textu i grafiky. Škoda, že se ISRO zřejmě rozhodla nerozlišovat oficiálně Vikram a Pragyan 1 a 2. Jasně, máme Chandrayaan 2 a 3, nicméně lander a rover jsou samostatné kusy. Ten hrozící společný termín přistání Luny 25 a Vikramu 2 trochu připomíná závod mezi Lunou 15 a Apollem 11, kdo doveze první šutry z Měsíce. Naštěstí se Luna 15 rozflákala o povrch, takže to vyšlo na tu lepší část světa 🙂