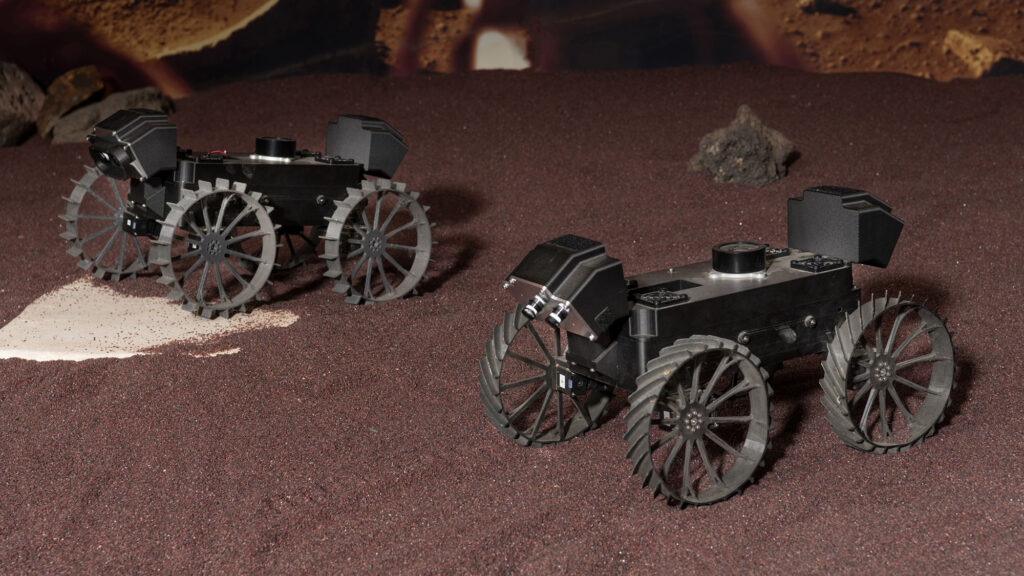
Vzpomínáte si ještě na téměř dva roky starý článek o testech vozítek CADRE (Cooperative Autonomous Distributed Robotic Exploration) na simulovaném lunárním regolitu? Článek končil tím, že by se jejich nástupci mohli do pěti let vydat na Měsíc v rámci programu CLPS. Téměř dva roky uplynuly a NASA nyní o projektu píše s jistotou jeho cesty na Měsíc. Tato tři malá vozítka (NASA jejich rozměry přirovnává k příručním zavazadlům) jsou výjimečná v tom, že budou spolupracovat bez přímého lidského zásahu. Mezi jejich úkoly bude patřit trojrozměrné mapování lunárního povrchu s využitím kamer a radaru, který penetruje povrch.

Zdroj: https://www.nasa.gov/
Spolupracující rovery CADRE jsou experimentem pro praktickou demonstraci inovativních technologií, které představují další krok, který agentura dělá vstříc vývoji robotických prostředků, které by jednou díky autonomnímu provozu mohly zvýšit efektivitu budoucích misí. Kromě toho se má také ověřit, zda by simultánní měření z několika pozic mohlo prokázat potenciál využití multirobotických misí pro nový vědecký výzkum či podporu astronautů.
Rovery z programu CADRE by podle současného harmonogramu měly na Měsíci přistát v roce 2024 v rámci programu komerční dopravy nákladu na povrch Měsíce CLPS. Na povrch v oblasti Reiner Gamma mají být tyto tři rovery spuštěny na lanech. Vozítka pak s pomocí svých čtyř kol najdou osvětlené místo, kde otevřou své fotovoltaické panely a začnou se nabíjet. Poté mají strávit celý lunární den (14 pozemských dní) prováděním experimentů navržených k prověření jejich schopností a možností. „Naším cílem je demonstrovat, že síť mobilních robotů může autonomně bez zásahu člověka spolupracovat na plnění úkolů,“ uvedl Subha Comandur, projektový manažer mise CADRE z kalifornské JPL a dodal: „Může to změnit způsob našeho budoucího průzkumu. Otázkou budoucích misí se stane: „Kolik roverů tam pošleme a co budou dělat společně?““
Pozemní týmy pošlou pokyny na základní stanici, která se bude nacházet na 4 metry vysokém landeru. Skupina malých vozítek si pak ze svých řad vybere „vedoucího“, který rozdistribuuje pracovní pokyny k dosažení společného cíle. Každé vozítko si pak samo určí, jak nejlépe a přitom bezpečně splnit přiřazený úkol. „Jedinou instrukcí bude třeba: „Jděte prozkoumat tuhle oblast“ a rovery si budou muset zjistit všechno další – kdy proběhne přesun, jakou cestu si zvolí, jak se budou vyhýbat místním překážkám,“ vysvětluje Jean-Pierre de la Croix, hlavní vědecký pracovník mise CADRE z JPL a dodává: „Jen jim řeknete, jaký je hlavní cíl a ony si už musí samy určit, jak jej splní.“

Zdroj: https://www.nasa.gov/
Rovery budou čelit celé řadě zkoušek, které proběhnou za bedlivého dohledu monitorovací kamery na zmíněné základnové stanici na vrcholu landeru. První zkouškou bude jízda ve formaci a udržení kursu s využitím ultraširokopásmových rádiových komunikačních aparatur k udržení vzájemné pozice roverů, zatímco jejich senzory budou zajišťovat vyhýbání se překážkám. V rámci druhého experimentu si každý rover vybere cestu podle vlastních preferencí, aby bylo možné prozkoumat vyznačenou oblast o ploše přibližně 400 metrů čtverečních, ze které má vzniknout topografická 3D mapa, k čemuž poslouží stereokamery. Projekt má také zjistit, jak si tým poradí se situací, když jeden z roverů přestane z nějakého důvodu pracovat. Případný úspěch pak naznačí, že multirobotické mise jsou dobrým způsobem pro průzkum nebezpečných, ale vědecky hodnotných lokalit.
Samotný projekt CADRE sice není zaměřen na provádění vědeckého průzkumu, ale i přesto vozítka dostanou multistatické radary penetrující povrch. Při jízdě ve formaci bude každý rover přijímat signály vyslané ostatními vozítky, díky čemuž bude možné vytvořit trojrozměrnou mapu podpovrchových struktur až do hloubky 10 metrů pod povrchem. Skoro se tomu až nechce věřit, ale tato malá vozítka budou díky této spolupráci sbírat vědecky kompletnější data, než dosavadní špičkové radary penetrující povrch – třeba RIMFAX na roveru Perseverance. „Uvidíme, jak bude více robotů spolupracovat, jak budou provádět vícenásobná měření ve stejnou chvíli na různých místech a jak zvládnou sbírat data, kterých by jediné vozítko nemohlo dosáhnout,“ zmínil Comandur a dodal: „Může to být projekt, který změní pravidla, kterými se řídí provádění vědeckého výzkumu.“

Zdroj: https://www.nasa.gov/
Ale tým kolem projektu CADRE nebude jen testovat autonomii a schopnost týmové spolupráce. Rovery musí také přečkat drsné teplotní podmínky u měsíčního rovníku, což je výzva především pro takto malá vozítka. Na spalujícím slunečním svitu mohou rovery čelit během poledne teplotám až 114 °C. Rovery postavené z kombinace běžně dostupných a na zakázku vyrobených dílů musí být dostatečně odolné, aby přečkaly teploty lunárního dne, ale stále byly kompaktní a lehké. Současně musí disponovat výpočetním výkonem, který umožní chod softwaru pro kooperativní autonomii vyvinutý v JPL.
Vyvážit tyto požadavky přitom není jednoduché. Rovery a základnová stanice budou jakožto své mozky používat malý čip, který patří do kategorie těch z chytrých mobilních telefonů. Konkrétně půjde o novou generaci varianty, kterou využívá marsovský vrtulník Ingenuity. Jenže při jeho výpočetní aktivitě vzniká teplo. Aby se rovery neupekly, přišel jejich tým s kreativním řešením – třicetiminutovými cykly aktivity a „spánku“. Každou půlhodinu se rovery vypnou, aby mohly s pomocí radiátorů zchladnout a dobít své akumulátory. Jakmile dojde k jejich souběžnému probuzení, nasdílí si mezi sebou informace o svém stavu s pomocí rádiové sítě (něco na způsob Wi-Fi sítě). Poté dojde opět ke zvolení vedoucího – tím se stane rover, který je na nadcházející úkol v nejlepším stavu. A poté už vozítka vyrazí vstříc dalšímu kolu lunárního průzkumu.
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/…/e1a-pia25666-cadre-merc-pair-edited-web2.jpg
https://www.nasa.gov/…/e1b-pia25665_cadre-dm-with-sand-engineer-edited-web.jpg
https://www.nasa.gov/…/e2-pia24668-cadre-dm-with-optimism-cropped-web2.jpg
http://www.nasa.gov/sites/default/files/thumbnails/image/cadre_thumbnail_2.jpg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
Je skvělé, že tento projekt pokračuje. Už Ingenuity ukazuje, že ve spolupráci je síla. A to na nic předem nebyla pořádně připravovaná, protože to měl být jen technologický demonstrátor. Jsem strašně zvědavý, co se povede těmto vozítkům: budou od začátku chystané na své vědecké úkoly a bude jich výrazně více než jeden (jako je Ingenuity). Mohli bychom se dočkat hodně zajímavých výsledků a hlavně i ve vyšším tempu, myslím.
Je skvělé, že tento projekt pokračuje. Už Ingenuity ukazuje, že ve spolupráci je síla. A to na nic předem nebyla pořádně připravovaná, protože to měl být jen technologický demonstrátor. Jsem strašně zvědavý, co se povede těmto vozítkům: budou od začátku chystané na své vědecké úkoly a bude jich výrazně více než jeden (jako je Ingenuity). Mohli bychom se dočkat hodně zajímavých výsledků a hlavně i ve vyšším tempu, myslím.