
Premiéra indického nosiče SSLV nevyšla zcela podle představ. Raketa 7. srpna v 5:48 SELČ úspěšně odstartovala. Cesta do vesmíru vypadala i minuty po startu velmi nadějně. Nicméně finální navedení nákladu na kruhovou oběžnou dráhu selhalo, jak později potvrdila kosmická agentura ISRO. Každý start je výzvou a nikdy to nebude zcela jednoduché a bez rizika. Je třeba si také uvědomit, že přesně k těmto účelům slouží zkušební starty, které mají ověřit všechny systémy nového nosiče. Získaná data se následně podrobně analyzují a raketa vylepšuje. A ani tentokrát tomu nebude jinak. Po provedení nápravy se ISRO vrátí k dalšímu pokusu v rámci zkušební mise SSLV-D2. Pokud se nic nezmění bude při něm vyneseno hned několik družic. Konkrétně půjde o čtyři snímkovací družice společnosti Blacksky Global o celkové váze 56 kg. Všechny prozatím dostupné informace o nehodě najdete v tomto článku.
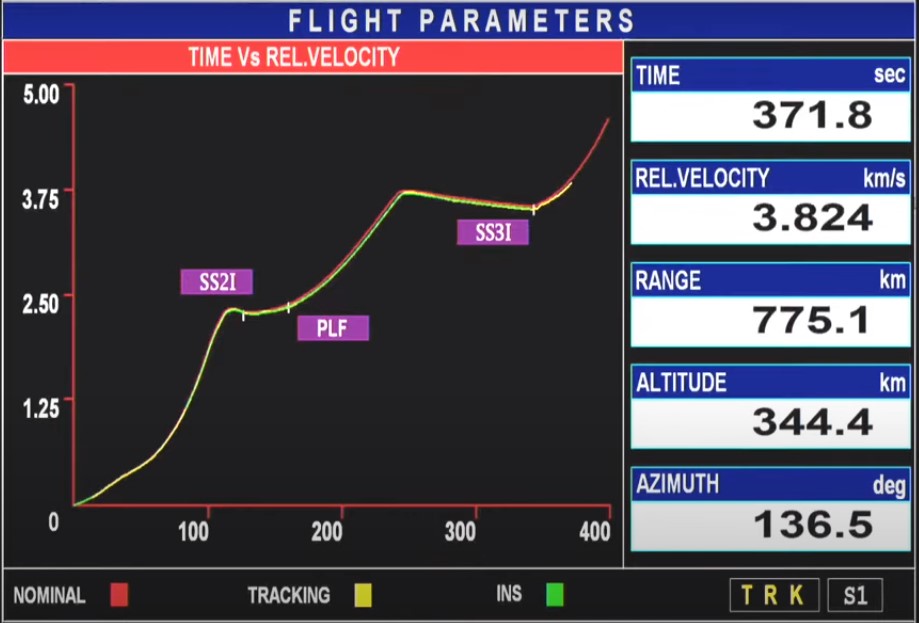
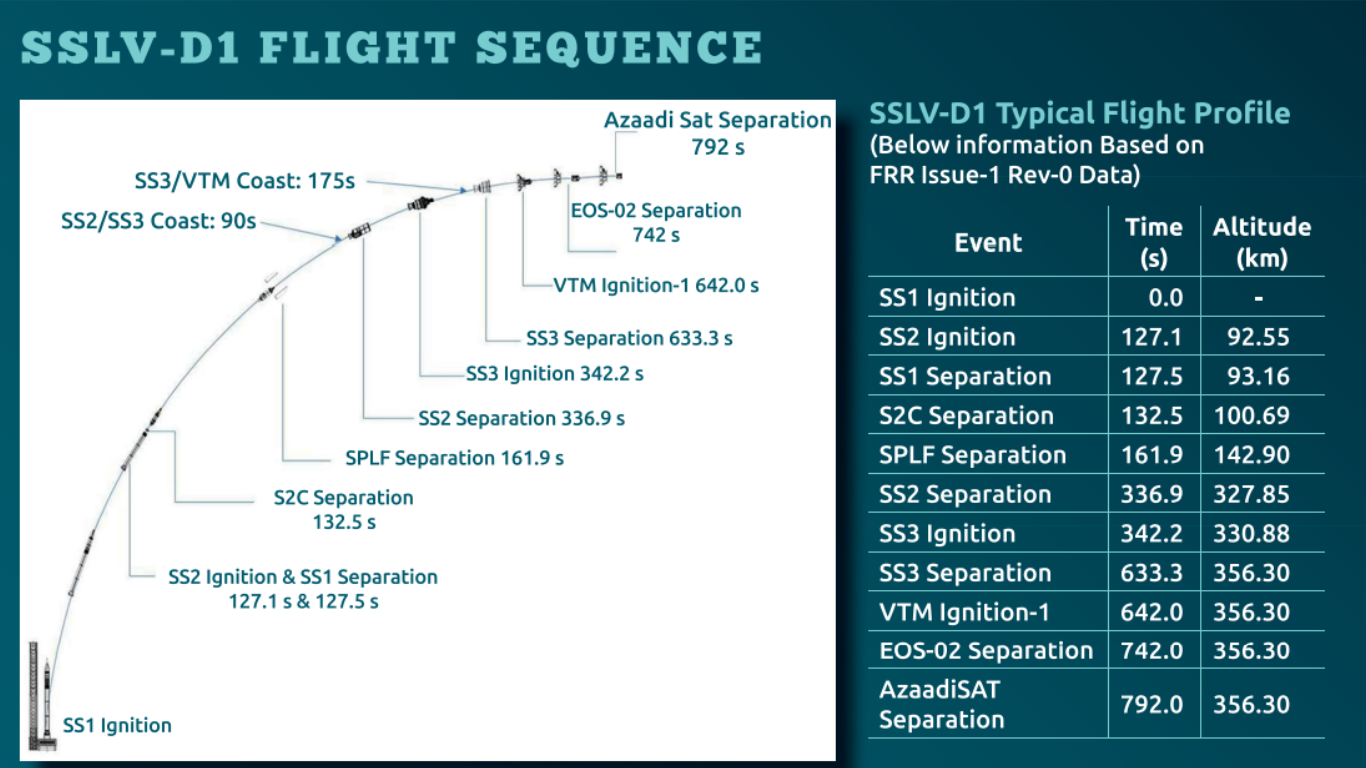
Kdo si v sobotu přivstal měl možnost sledovat první start rakety SSLV (Small Satellite Launch Vehicle) Živě a česky. Všechny potřebné informace o raketě i nákladu vyšly už v našem přenosovém článku zde. V prvních chvílích šlo vše podle plánu a ve středisku letů panovala dobrá nálada. Byly vidět úsměvy a znát radost. Jenže platí neříkej hop, dokud nepřeskočíš. První stupeň svou práci odvedl dobře, stejně jako druhý a třetí. Zajímavostí je, že raketa k překonání sto kilometru potřebovala zhruba 130 sekund! Po zažehnutí 3 stupně v 371 sekundě, jsme měli možnost vidět v grafice drobné odchýlení, ale po chvilce se vše vrátilo do normálu a i s kontrolního střediska zaznělo, že 3 stupeň pracuje normálně. Po jeho dohoření přišla na řadu přeletová část. Zde již v 479 sekundě od startu bylo patrné na grafu jasné odchýlení, které navíc stále narůstalo. Z režie zaznělo, že by měl začít pracovat poslední stupeň a upravit nepatrně rychlost, náklon a sklon. Stupeň VTM měl tedy upravit dráhu na správné parametry. Plánovaná dráha byla kruhová ve výšce 356 km. V 490 sekundě letu však již bylo jasné, že není vše jak má být. Grafika jasně ukazovala nestandardní pozici, ale i „vlnky“ zřejmě z toho jak se raketa snažila nepřesnost kompenzovat. To by znamenalo, že 4 stupeň se možná zažehl dřív, než bylo původně v plánu a odchylka byla zřejmě větší, než bylo v silách malého korekčního modulu. Možná tedy 3 stupeň nemusel pracovat úplně správně, ale podle prohlášení ISRO tomu tak není a je to jen má spekulace.
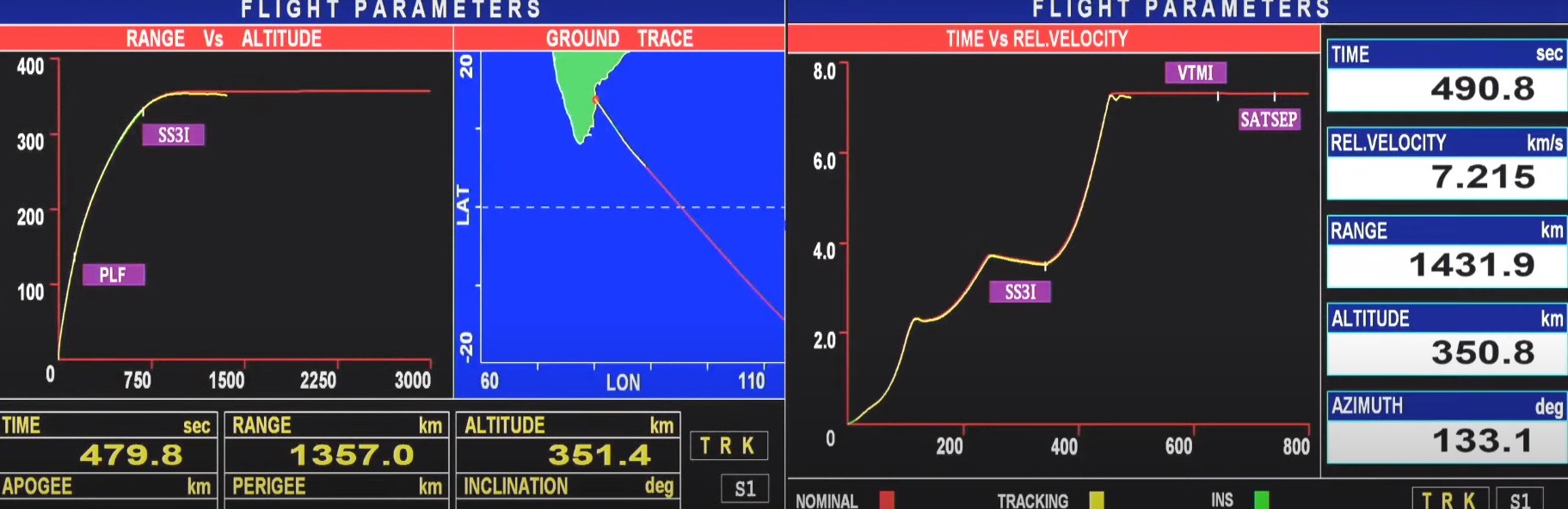
Původně v plánu bylo zažehnout VTM až v 642 sekundě letu, a měl hořet asi 20 sekund, ale s přenosu vyplývá, že k tomu došlo dříve a zážeh trval pouze 0,1 sekundy. Pokud vůbec. Indii se všeobecně při premiérových letech příliš nedaří a smůla pokračuje. Zde je první oficiální stanovisko krátce po letu ve kterém stojí, že všechny stupně pracovaly podle plánu, i když to nebyla pravda.
SSLV-D1/EOS-02 Mission: Maiden flight of SSLV is completed. All stages performed as expected. Data loss is observed during the terminal stage. It is being analysed. Will be updated soon.
— ISRO (@isro) August 7, 2022
Další informace poté přišly v průběhu dne, kdy jsme se dozvěděli, že příčinou byl vadný senzor. Anomálii se nepodařilo zjistit včas, aby bylo možné přejít na záchrannou akci. Čtvrtý stupeň na ní neuměl zřejmě zareagovat správně. Konečná dráha byla tedy eliptická. Namísto kruhové. Konečné parametry byly 365 x 76 km. Nejnižší bod jasně ukazuje, že družice se na takové oběžné dráze nejsou schopny udržet, a později bohužel zanikly v atmosféře a nešlo je použít. Z dvojce tweetu ISRO by mohlo ovšem i vyplývat, že je možné, že senzor špatně vyhodnotil parametry a rozhodl se provést záchranou akci, i přesto, že nebyla třeba. Což by mohly být i ony vlnky v parametrech. To je ovšem opět jen spekulace. Tak, nebo tak agentura se prý na chybu zaměří a do příštího startu provede nápravu. Dále podle prohlášení ředitele ISRO Shri S. Somanatha všechny ostatní systémy rakety pracovaly velmi dobře. Elektronika i ostatní hardware se osvědčil stejně jako nový separační i zážehový systém. Selhání odpoledne potvrdil také Michal Václavík z České kosmické kanceláře.
(1/2) Dnešní start indické nosné rakety SSLV se nakonec opravdu nezdařil. Náklad byl dopraven na dráhu s výškou apogea 365 km, perigea 76 km (namísto taktéž 365 km) a zanikl tak v atmosféře Země. Důvodem byla včas neidentifikovaná závada jednoho ze senzorů. pic.twitter.com/RkMhzmCDKz
— Michal Vaclavik (@Kosmo_Michal) August 7, 2022
SSLV tedy prokázala, že bude schopna náklady vynášet, ale přesto bude třeba ještě pár věcí dopilovat a do příště napravit. Věřím, že další let bude úspěšnější a podaří se tento nosič zařadit do flotily ISRO, kde bude úspěšně sloužit řadu dalších let. Díky této raketě totiž řada institucí v zemi dostane šanci dostat svou družici za rozumné náklady na oběžnou dráhu. Tím se celé řadě lidí otevřou nové možnosti. Zároveň by raketa mohla přilákat i zahraniční zájemce, ale to bude muset prokázat, že je skutečně bezpečná a schopna dostat družice na požadovanou dráhu.
Zdroje informací:
https://www.youtube.com/watch
https://kosmonautix.cz/2022/08/zive-a-cesky
https://twitter.com/Kosmo_Michal
https://www.isro.gov.in/launcher
https://twitter.com/isro
Zdroje obrázků:
https://www.isro.gov.in/sites/default
https://www.youtube.com/watch





{kind=link}
{kind=link}
Tak škoda. Animace samozřejmě vypovídají jen o předpokladech ze vstupnich měřených parametrů. Modelování toho zvlnění na konci je nejasné. Jistým parametrem je čas, dalším zrychlení.
Rychlost a výšku Indové jen počítají nebo opravdu naměří?
Ty jsou totiž vzájemně důležité.
Vlnka na konci je tak velká, že spíš napovídá o pořádném kopanci čtvrtého motoru ve zlomku sekundy (zničení motoru) – vyhrazuji si právo na fantazii.
K těm příštím družicím na SSLV-D2… Znamená to, že EOS-02 a AzaadiSAT budou zapomenuty?
Problém je, že na 4 stupni není motor jeden, ale hned 12. Zda se zažehávají všechny najednou netuším. Nezbývá než věřit, že šlo jen o senzor.
Ta vlnka rychlosti je směrem dolů. Znamenalo by to poměrně silný brzdný zážeh. Pokud jsou hodnoty reálné, musel by zážeh případně výbuch motorů proběhnout v pozici proti směru letu. To se teoreticky stát může, pokud stroj začne rotovat a senzory nejsou schopny to zachytit či dokonce tu rotaci samy vyvolají posíláním nesprávných hodnot. Pak se může probrat jiný senzor (respektive rutina řídícího systému), kterému se nelíbí vektor zrychlení vůči směru letu a motory odstaví úplně.
V bodu odpojení EOS-02, který byl zaznamenaný kamerou 18, nebyla patrná žádná rotace.
Ještě k družicím. Informace o nákladu pro druhou misi nosiče byly známy ještě před startem. Zda dostanou novou šanci znovu není známo. V druhém případě si myslím, že je téměř jisté, že vznikne na podobné bázi další cubesat.
Díky moc za prehledný článek. Škoda, že to nevyšlo podla plánu, ale snád to nabudúce vyjde.
Není zač. Rado se stalo.
Dobrý den, ještě jedna otázka na Vás, pane Zvoníku…
Jakým způsobem tato raketa (složená ze stupňů na tuhé palivo) udržuje správný směr letu v pauzách mezi zhasnutím a zapálením dalšího stupně?
Spoléhá se na setrvačnost pohybu i nasměrování trupu, nebo se dělají dodatečné korekce …jak, čím?
Děkuji za dodatečné informace.
Pokud je mi známo, tak se o orientaci stará během letu právě 4 stupeň VTM. A vektorování tahu.