Tento článek začne trochu netradičně – malým pohledem do fungování redakce našeho blogu. Někdy se nové seriály rodí dlouhé týdny – promýšlí se, jak je nejlépe pojmout a z jakých zdrojů čerpat, jindy zase stačí dobrý námět a nápad na seriál vykvete prakticky sám. Právě druhý případ nastal u článku, který právě čtete. Oficiálně jde o první díl nepravidelného seriálu, který si klade za úkol přinášet trochu detailnější technické informace o nově vypuštěných kosmických sondách. Všechno to začalo tím, že portál spaceflight101.com vydal sérii čtyř článků, ve kterých důkladně rozebírá technické aspekty sondy TGO a pouzdra EDM, tedy dvou součástí mise ExoMars 2016. Při pohledu na tyto články jsme si řekli, že by byl hřích nepřeložit je do češtiny a neumožnit k nim našim čtenářům přístup.
Zrodil se tak nápad na založení seriálu. Nebudeme se v něm zaměřovat pouze na projekt ExoMars, ale i na jiné sondy, které budou zrovna startovat. Svým způsobem bychom za „nultý“ díl mohli považovat článek o přístrojovém vybavení satelitu Jason-3. Dnes tedy přichází první díl, ve kterém se podíváme na technické řešení evropské sondy TGO, kterou v pondělí vynesla raketa Proton-M k Marsu. V dalších dílech se můžete těšit na popis vědeckých přístrojů na této sondě, na technické řešení pouzdra EDM i na vědecké přístroje na něm.

Zdroj: spaceflight101.com
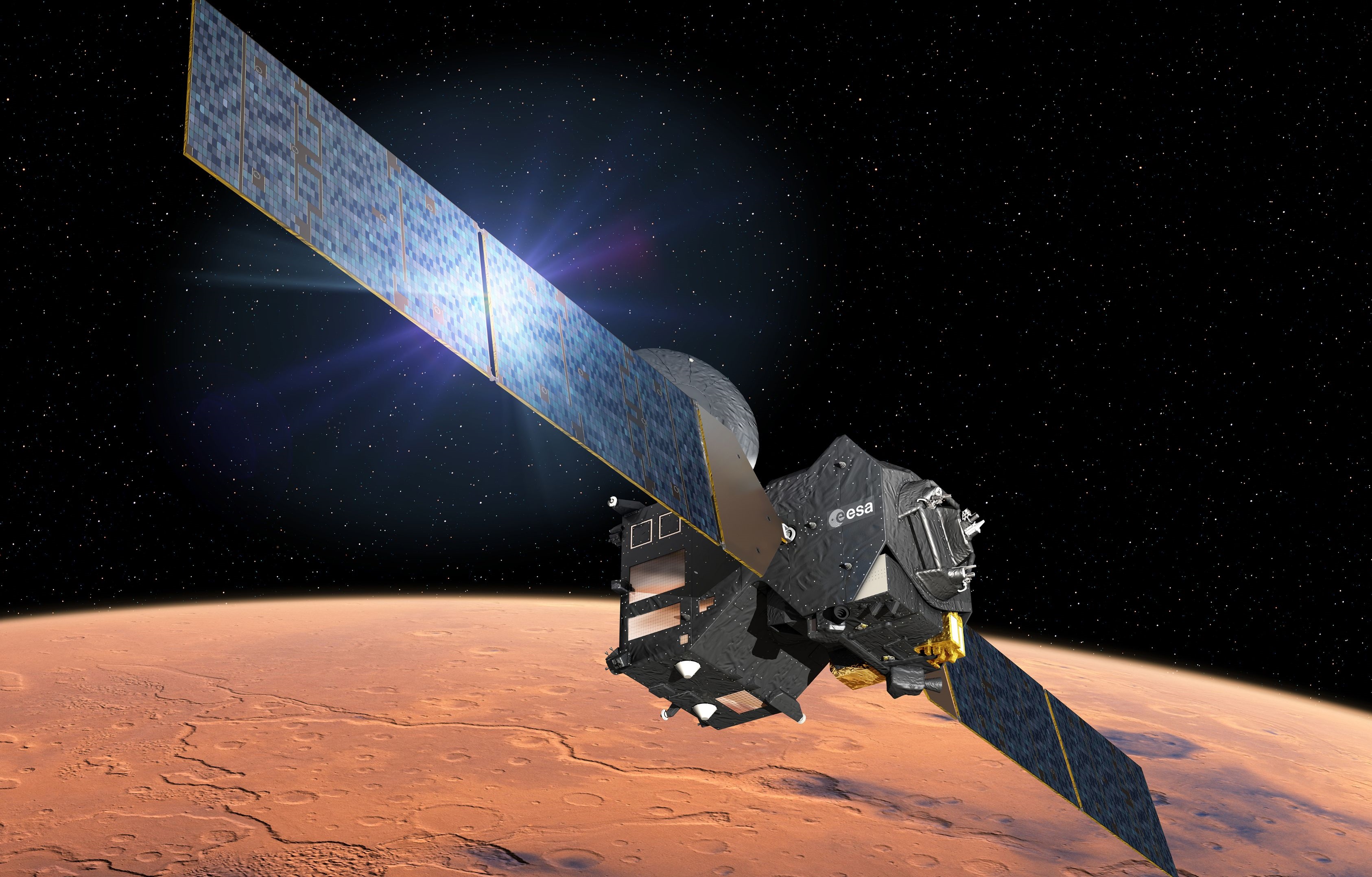
Jak již asi víte, TGO je zkratka z názvu Trace Gas Orbiter – úkolem sondy je po dobu několik let zkoumat z oběžné dráhy složení marsovské atmosféry s hlavním důrazem na přítomnost látek obsažených ve stopovém množství. Především jde o detekci metanu, u kterého se již zjistilo, že jeho koncentrace kolísají jak v čase, tak i prostoru – skoro jako kdyby byl tento plyn nějakými procesy produkován a následně téměř beze stopy mizí. Sondu TGO postavila firma Thales Alenia Space a na její palubě najdeme 4 vědecké přístroje, které si představíme v příštím článku. Dva jsou čistě evropské a další dva vznikly ve spolupráci s Ruskem.
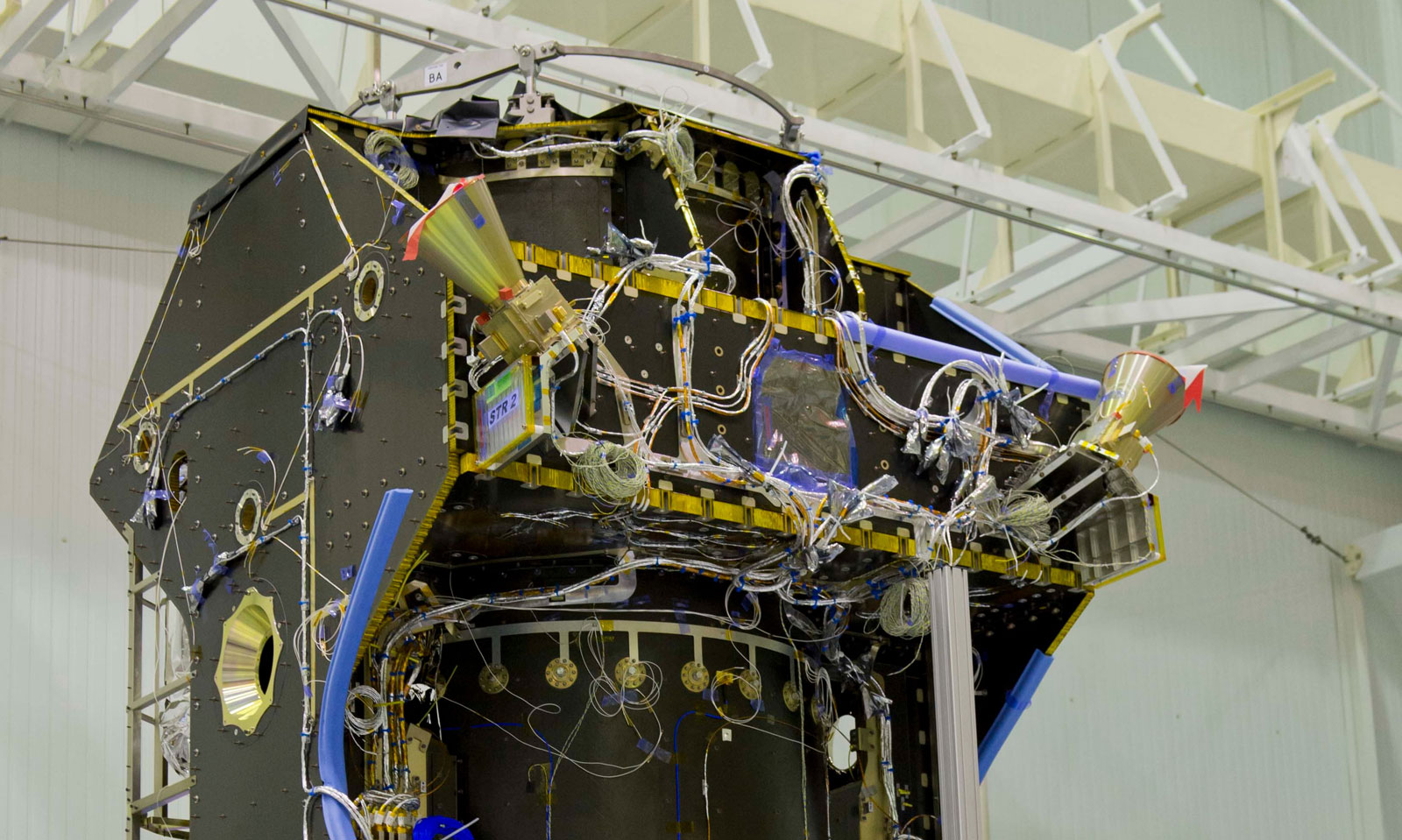
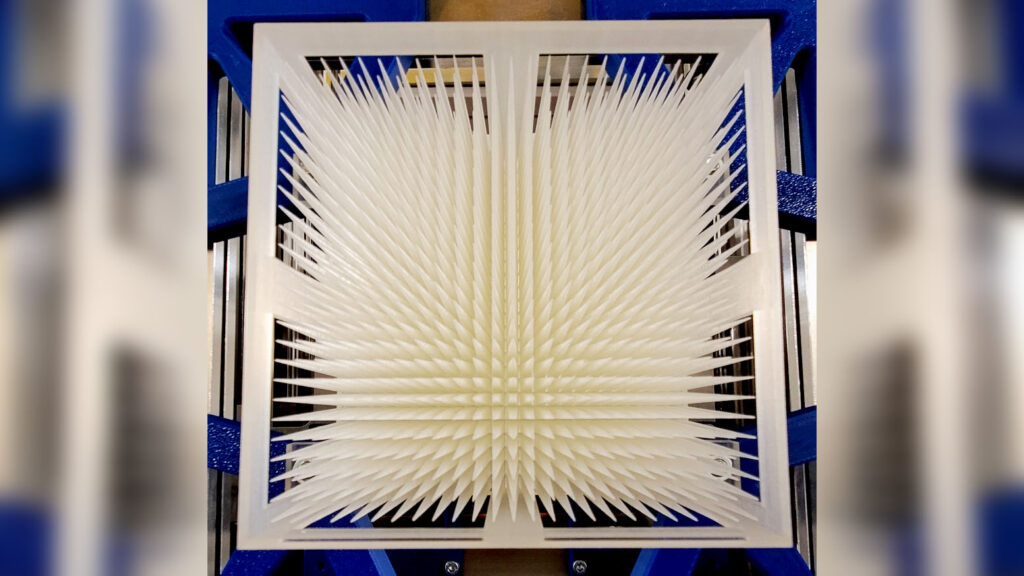
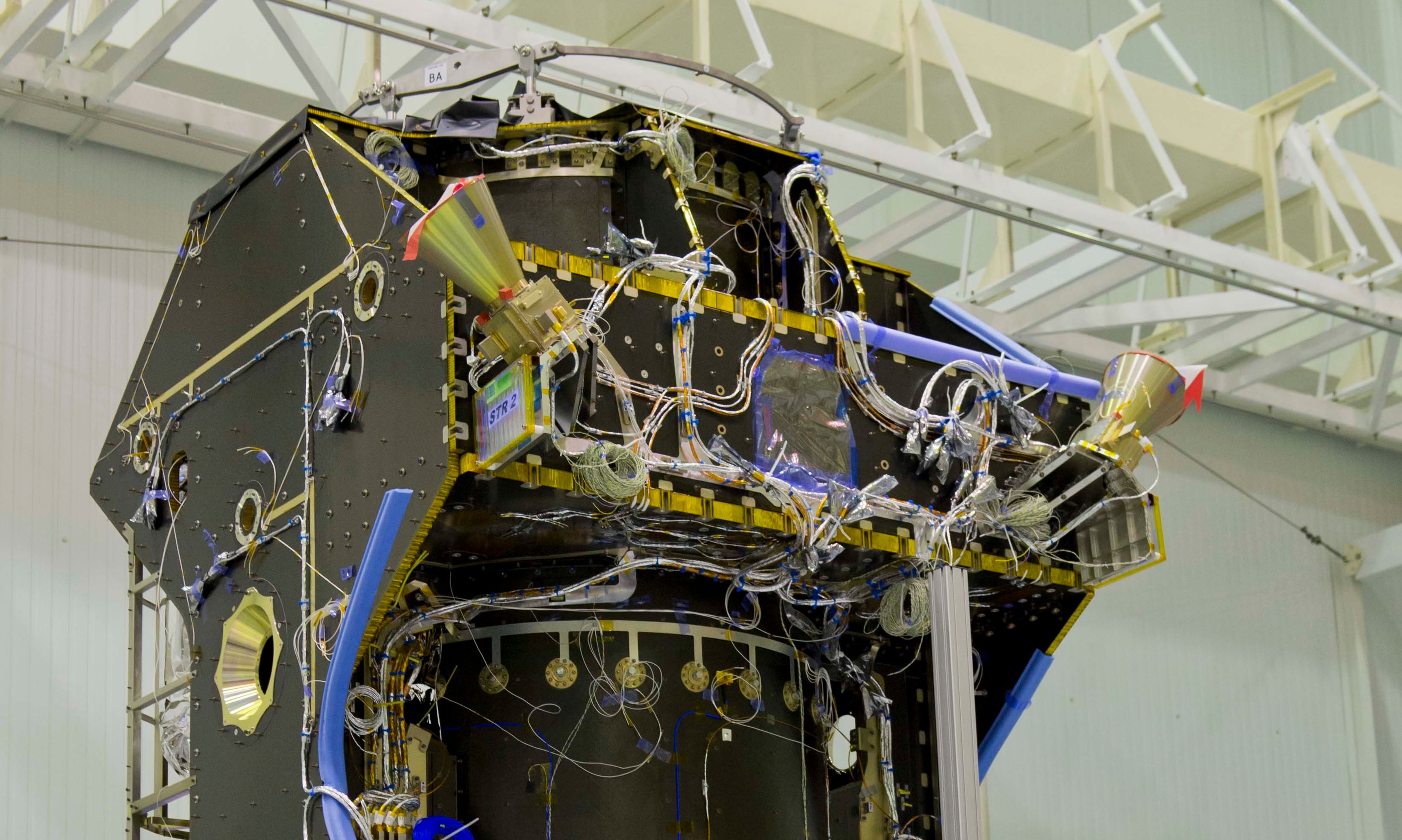
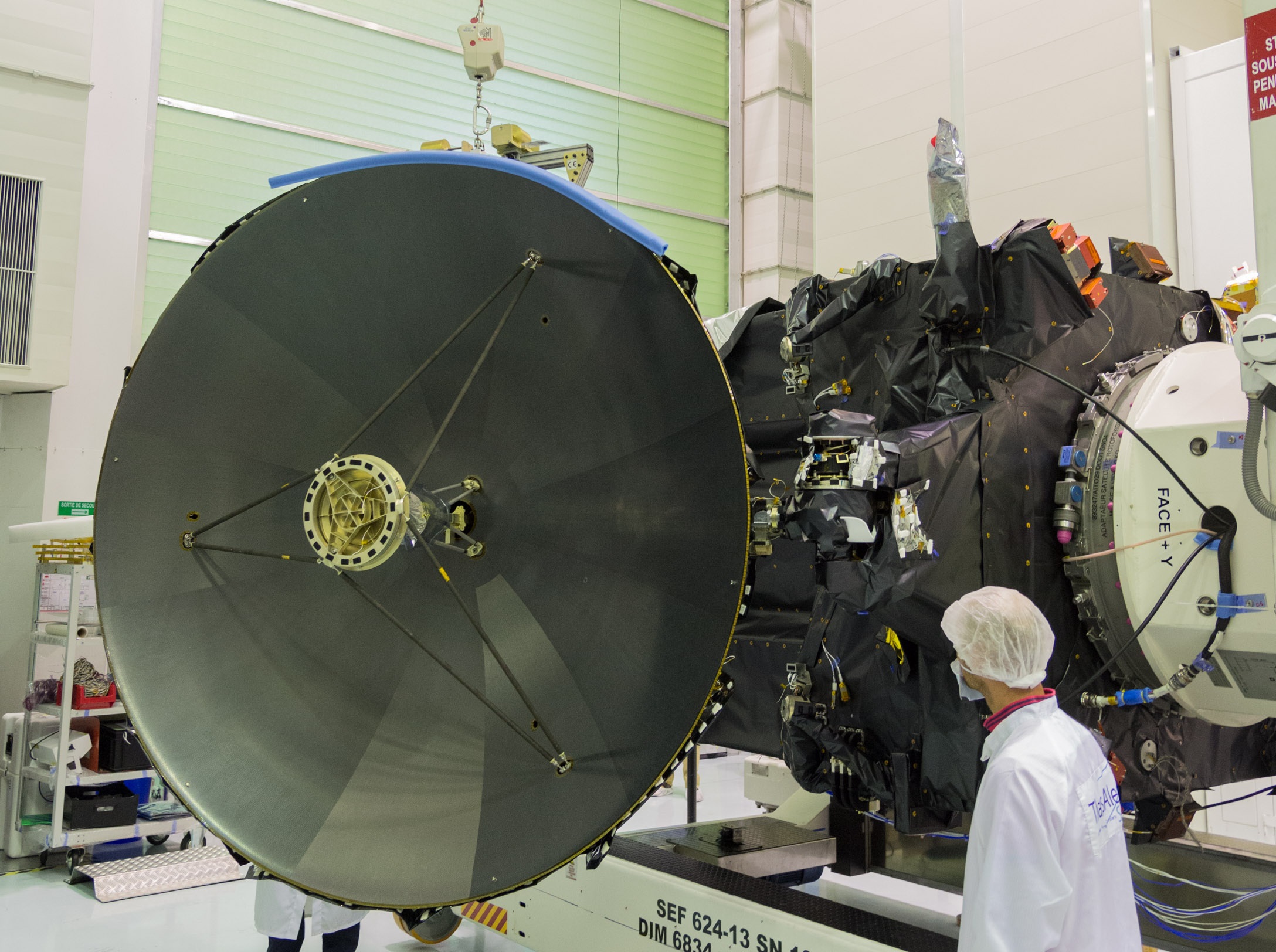
Samotná sonda má tvar kvádru, jehož interiér je vyztužen centrálním dutým válcem o průměru 119 centimetrů. Při startu měřila sonda 3,2 x 2 x 2 metry a vážila 4 332 kilogramů – z toho 112 kilogramů připadalo na vědecké přístroje a 600 kilogramů vážil přistávací modul Schiaparelli (EDM), který se od sondy oddělí tři dny před příletem k Marsu a který si představíme v příštích článcích.
Ale zpět k sondě TGO. Její středový válec tvoří páteř sondy a slouží k rozložení zátěže především při startu. Kromě toho se na tento dutý válec připojuje lander EDM, který je umístěný na horní straně sondy. Do středové roury jsou také uloženy nádrže sondy – je tak zajištěno, že i při jejich postupném vyprazdňování zůstane těžiště sondy na stejném místě.
Zdroj: spaceflight101.com
Elektrický systém
O dodávky elektřiny se stará dvojice solárních panelů, které po rozložení ve vesmíru dosahují rozpětí 17,5 metru. Každý solární panel se skládá ze dvou polí galium-arsenových článků o rozměrech 312 x 174 cm – po rozložení tak má každý panel délku 7,9 metru. Průměrně by měly panely dodávat 2 000 W do systému PCU (Power Conditioning Unit), který kontroluje dodávky energie i stav baterií.

Zdroj: spaceflight101.com
Každý solární panel má vlastní systém Solar Array Drive Mechanism (SADM), který zodpovídá za otáčení panelu vůči Slunci, kdykoliv je to možné. Systém PCU obsluhuje devět oddělených a redundantních elektrických větví, což zajišťuje maximální flexibilitu a odolnost celého systému. PCU zásobuje energií přímo pohonný systém Propulsion Control and Drive Unit, oddělené vedení vede k hlavnímu řídícímu systému Spacecraft Management Unit a k systému pro udržování orientace Attitude Determination and Control System.

Zdroj: spaceflight101.com
Zbývající elektrické větve dodávají energii vědeckým přístrojům, systému Payload Data Handling Unit (PDHU), která zpracovává data, systému UHF Electra Radios, který má na starost komunikaci, systému tepelné kontroly Thermal Control System. Jedna z linek napájí také pyrotechnickou sestavu, která bude mít na starosti oddělení pouzdra EDM a ještě předtím bude zajišťovat nabíjení jeho baterií při přeletové fázi. Sonda TGO disponuje dvojicí nabíjecích lithium-iontových akumulátorů s celkovou kapacitou 5100 Wh, které budou zajišťovat dodávku energie při průletu nad noční stranou Marsu.
Tepelné hospodaření sondy spočívá v kombinaci aktivní systému tepelné kontroly a pasivních systémů. Pasivními systémy se rozumí pokrytí sondy izolační fólií a několika vrstvami ochranné látky, které mají udržet důležité systémy při optimální teplotě. Aktivní část se skládá ze série termistorů, které dodávají informace o aktuální teplotě v různých částech sondy do hlavní řídící jednotky Spacecraft Management Unit. Ta pak zapíná či vypíná palubní topidla, která udržují vhodné podmínky.
Pohonný systém
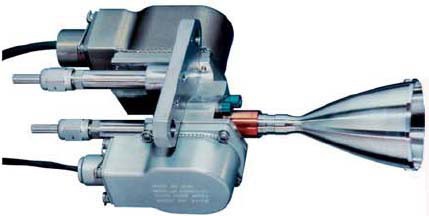
Sonda TGO disponuje hlavním pohonným systémem a systémem pro udržování orientace a stabilizaci. Hlavní systém je tvořen jedním motorem S-400-15, který se bude používat pro velké manévry (například vstup na oběžnou dráhu a podobně). Kromě toho na sondě najdeme dva svazky deseti malých trysek pro drobné manévrování, změny orientace a lehké úpravy oběžné dráhy.

Zdroj: spaceflight101.com
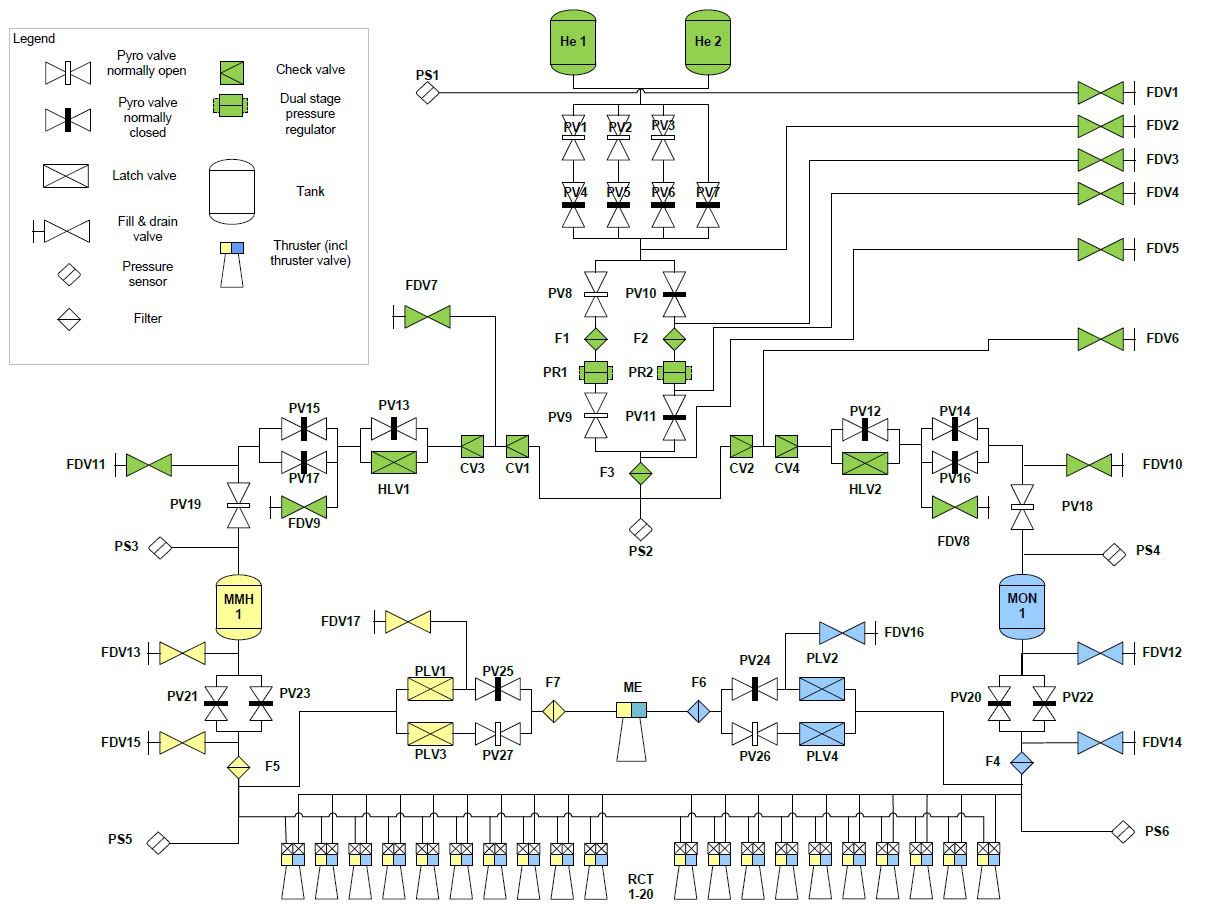
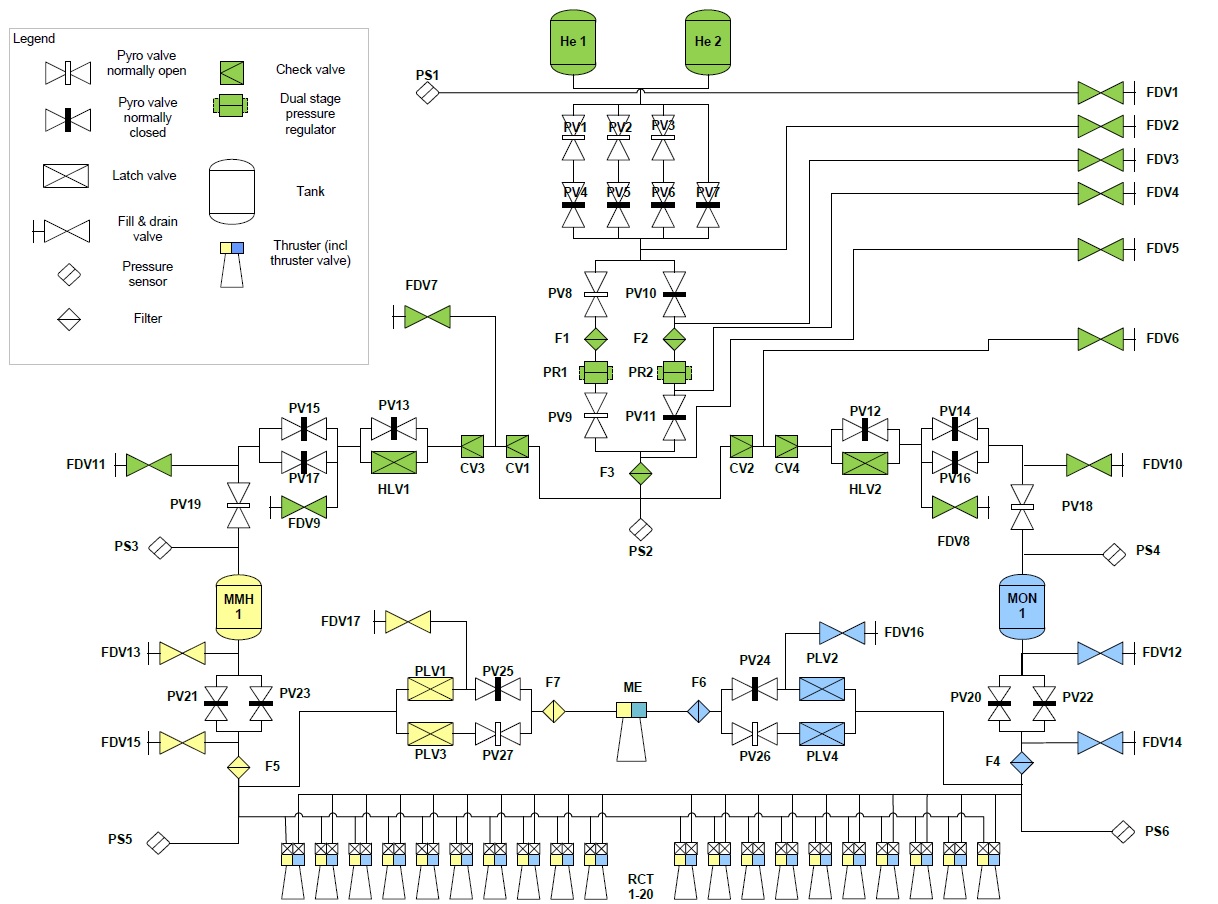
Všechny trysky spalují monometylhydrazin smíchaný s okysličovadlem v podobě oxidu dusičitého. Ty se skladují ve dvou válcovitých nádržích, které jsou uloženy nad sebou v již zmíněné centrální rouře sondy. Každá nádrž pojme 1207 litrů a když TGO startovala, měla na své palubě 1000 kilogramů paliva a 1500 kg okysličovadla. Vně centrálního válce najdeme dvě nádrže s heliem. Tento plyn je natlakován na 310 barů a slouží k tlakování nádrží.
Zdroj: spaceflight101.com
Celý tlakovací systém se skládá z několika pyrotechnických ventilů, filtrů, kontrolních ventilů, regulátorů tlaku, tlakových převodníků, které zajišťují, že se helium dostane do nádrží při správném tlaku. Přímo pod heliovými nádržemi je umístěn systém pyro ventilů se čtyřmi větvemi, přičemž tři z nich se mohou otevírat a zavírat aktivováním příslušných ventilů pro znovunatlakování pohonného systému.
Zdroj: spaceflight101.com
Toto znovunatlakování se tedy může provést třikrát za celou misi. Čtvrtý okruh se může použít pro nevratné natlakování systému. Tento systém se používá pro oddělení tlakování mezi zážehy hlavního motoru za účelem minimalizace času, kdy je systém pod velkým tlakem, což by mohlo vést k únikům.
Tlakovací médium poté projde přes filtry, dvouúrovňové regulátory tlaku v redundantním zapojení a následně je rozvod s heliem rozdělen do dvou segmentů – první vede do nádrže s monometylhydrazinem a druhý do nádrže s oxidem dusičitým. Každá z těchto spojnic disponuje dvojicí kontrolních ventilů, západkovým ventilem, pyrotechnickým bezpečnostním ventilem a převodníkem tlaku.
Palivo a okysličovadlo opouští nádrže a míří k trysce hlavního motoru, nebo k malým tryskám. Ty jsou napojeny na dva samostatné okruhy, ve kterých jsou hnací ventily kvůli izolaci a tlakové senzory, které kontrolují tlak v systému. Každá tryska systému Reaction Control Thrusters má záložní ventily pro přívod paliva, přičemž přívodní potrubí k hlavnímu motoru je vybaveno dvojicí západkových ventilů, izolačních ventilů a palivových filtrů.

Zdroj: spaceflight101.com
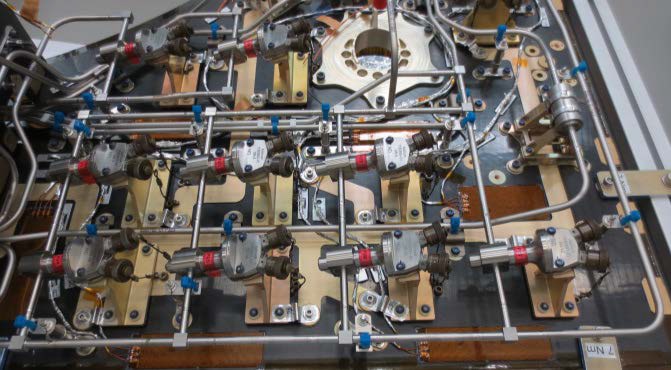
Jak jsme již napsali o několik řádků výše – sonda TGO disponuje dvěma svazky deseti trysek systému Reaction Control Thrusters. Každý z těchto svazků se skládá z trysek, které jsou orientované různými směry, což umožňuje celému systému pohybovat sondou ve třech osách. Trysky jsou podle své orientace sdruženy do sad. Sada A se skládá ze 4 trysek na straně -X-, které nejsou skloněné vůči ose a používají se pro manévry spojené se změnou rychlosti a pro rotaci kolem os Y a Z. Sada B disponuje 4+4 tryskami orientovanými v úhlu 70°, které zajistí rotaci sondy a otáčení kolem osy Z. Sada C se použije pro silovou kompenzaci a skládá se ze 2+2 trysek umístěných v opačných rozích na straně -X, přičemž jsou otočeny o 60° vůči +X.

Zdroj: spaceflight101.com
Trysky S-10-18 vznikly ve společnosti Airbus Defense and Space. Skládají se ze spalovací komory z platinové slitiny a z trysky, které zvládá teploty až 1500°C. Trysky mohou operovat v rozmezí tahu 6 – 12,5 N. Při nominálním tahu 10 N mají specifický impuls 291 sekund. Tlak přiváděného paliva je 10 – 23 barů (nejčastěji se počítá s 11 barů) a ve spalovací komoře dosahuje tlak 9 barů.
Motor za běžného stavu spotřebuje 3,5 gramu paliva / sekundu při směšovacím poměru 1,2 až 2,1 (optimálně se bude používat 1,65). Korekční trysky mají průměr hrdla 2,85 mm, zatímco hlavní motor má trysku s hrdlem o průměru 35 mm a expanzním poměrem 150. U korekčních trysek je plánovaná životnost 70 hodin hoření a měly by zvládnout milion operačních cyklů.
Hlavní motor S400-15 vyrobila také společnost Airbus Defense and Space se speciálním důrazem na dlouhé, ale samostatné zážehy, stejně tak se zohledňoval i vysoký celkový čas hoření. Hlavní motor tak poskytuje tah 424 N při specifickém impulsu 330 sekund.

Zdroj: spaceflight101.com
Systém udržování polohy a orientace
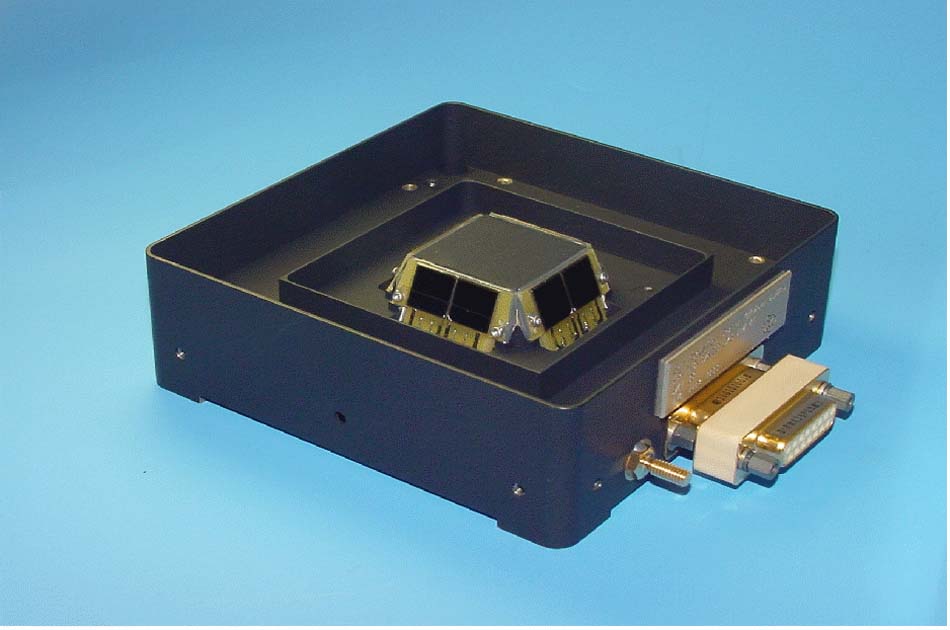
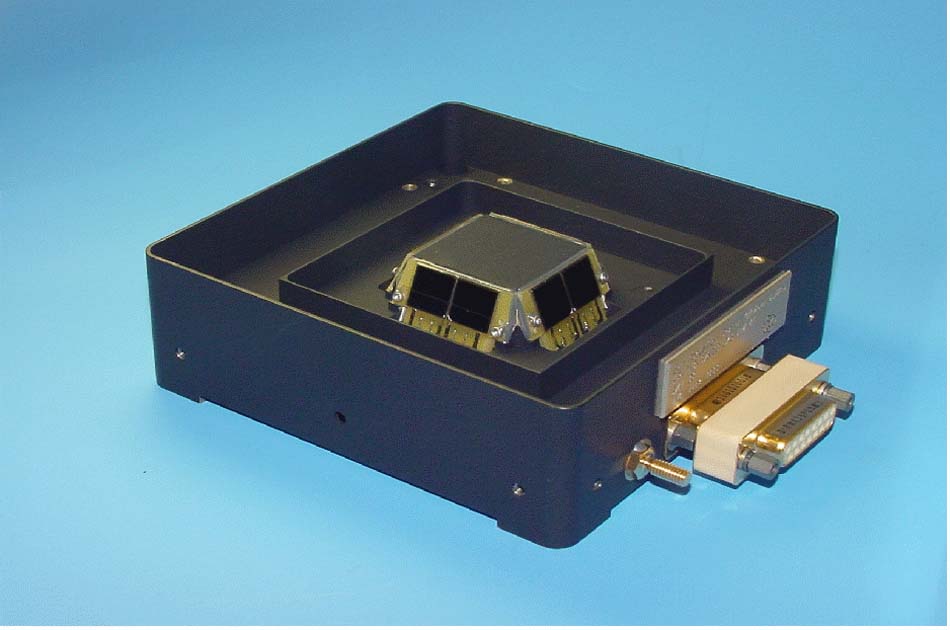
Tento systém se skládá z dvojice sledovačů hvězd, dvou slunečních senzorů, dvou inerciálních měřících jednotek pro určení orientace a čtyř gyroskopů plus systému trysek Reaction Control Thrusters, který jsme si popsali výše. Dva sledovače hvězd se širokým zorným polem se používají ke snímkování nebe a nasbíraná data analyzuje software, který pomocí speciálních algoritmů porovnává vyfocené rozložení hvězd s katalogem jejich pozic, díky čemuž může přesně určit orientaci sondy v prostoru. Sledovače hvězd jsou připojeny datovou sběrnicí 1553 k řídícímu systému sondy.
Zdroj: spaceflight101.com/
Sledovače mají zorné pole 20° x 20° a mohou sledovat až 15 hvězd. Software je schopen vypočítat na základě získaných dat orientaci za méně než deset sekund. Každý sledovač hvězd váží 2,6 kilogramu. Celý systém dosahuje ve dvou osách přesnosti 8,3 obloukové vteřiny a ve třetí ose je přesnost jen o trochu horší – 11 obloukových vteřin.
Dva sluneční senzory slouží sondě k přesnému určení polohy Slunce, aby věděla, kterým směrem má otočit své solární panely – třeba při přechodu do bezpečnostního režimu. Každý z těchto senzorů váží lehce přes 200 gramů a měří 12 x 13 x 3 centimetry. Šířka zorného pole je +/- 35° v ose x a +/- 65° v ose y. Senzory dosahují přesnosti s odchylkou +/- 2°, což je pro určení polohy Slunce dostačující. Aby nebyly senzory ohroženy slunečním zářením, disponují ochranným sklem a navíc jsou vybaveny detektory s vyšší odolností proti radiaci.
Zdroj: spaceflight101.com
Kromě výše popsaných optických senzorů najdeme na sondě TGO také dvě inerciální měřící jednotky. Ty kromě jiného měří třeba pohyby sondy ve všech osách, nebo akceleraci při zážezích motorů. Každá IMU (Inertial Measurement Unit) sestává ze tříosého laserového gyro-prstence a tříosého akcelerometru. Základní princip můžeme popsat takto – laserové paprsky mířící proti sobě mají různé frekvence, přičemž rozdíl závisí na rychlosti rotace.
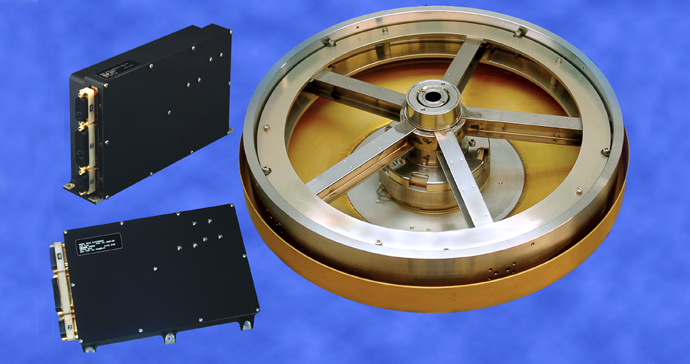
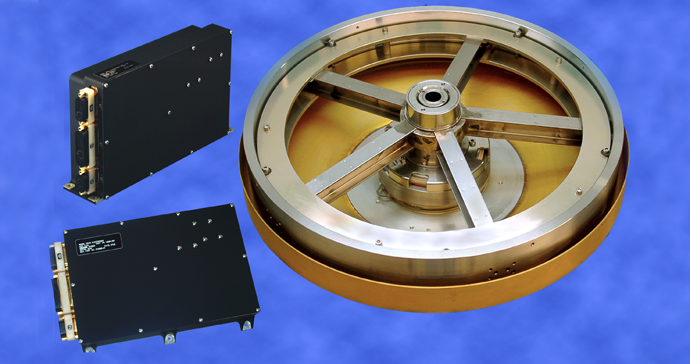
Udržování orientace okolo tří os má na starosti sada čtyř gyroskopů Reaction Wheel Assembly. V nich se roztáčí setrvačník pomocí elektromotorů na stejnosměrný proud. Při zrychlení rotace se tělo sondy otočí v ose, kterou gyroskop ovládá na opačnou stranu. jelikož se setrvačníky musí čas od času zastavit, sonda potřebuje i výše popsané trysky pro udržování orientace.
Zdroj: spaceflight101.com
Použité gyroskopy disponují momentem hybnosti 23 Nms při 7500 otáčkách za minutu. Setrvačníky mají průměr 35 centimetrů a jsou silné 12 centimetrů, přičemž jejich váha je cca. 5 kilogramů. Elektromotory, které je roztáčí jsou přímo napojeny na řídící počítač sondy, konkrétně na jeho systém Propulsion Control and Drive Unit (PCDU). V ní se setkávají informace jak z výše popsaných systémů, které udržují orientaci, tak i z hlavního řídícího systému SMU (Spacecraft Management Unit). Na základě aktuálních podmínek pak vydává rozhodnutí o provedení některých stabilizačních opatření.

Zdroj: spaceflight101.com
Stejně tak rozhoduje i o aktivaci různých předpřipravených programů udržování orientace, které si nyní popíšeme.
- Sun Acquisition Mode (SAM): Tento režim využívá pouze data ze slunečních senzorů a inerciálních měřících jednotek. Na jejich základě vypočítává polohu vůči Slunci a používá systém kontrolních trysek pro nasměřování vůči naší hvězdě. Tento režim se použil okamžitě po oddělení sondy od horního stupně a také se použije ve chvíli, kdy sonda přejde do bezpečnostního režimu (doufejme, že to nebude potřeba). Při aktivaci režimu SAM je možné aktivovat stabilizaci sondy okolo osy Z. Při přeletech ve stínu mohou řízení převzít gyroskopy.
- Nominal Mode using Propulsion (NOMP): V tomto režimu sonda využívá sledovačů hvězd, inerciálních měřících jednotek a kontrolních trysek pro udržování stabilizace ve třech osách. Program umožňuje udržovat danou orientaci – například při dočasné ztrátě dat ze sledovačů hvězd. Tento režim se použije i při orientaci sondy vůči Zemi při náběhu z bezpečnostního režimu a také ve chvílích, kdy je nutná velmi důkladná kontrola – třeba při oddělování EDM.
- Nominal Mode using Reaction Wheels (NOMR): Tento režim poskytuje jemné ovládání polohy ve třech osách s pomocí palubních gyroskopů. NOMR se bude používat při vědecké fázi a také při některých fázích brzdění o atmosféru. I při tomto režimu je možné autonomně odpojit ovládání gyroskopů.
- Orbit Control Mode (OCM): Teto režim je plánován pro manévry, které využívají hlavní motor, nebo korekční trysky. Při tomto nastavení mají hlavní slovo akcelerometry, protože je potřeba důkladně kontrolovat změnu rychlosti. Kromě toho se používají i gyroskopy a sledovače hvězd pro určování orientace a pro změny polohy jsou připraveny korekční trysky. Zastavení zážehu může být předem nastaveno buďto na přesný čas, nebo na údaje z akcelerometrů.
- Aerobraking Mode (EBM): Režim používaný ve chvílích, kdy bude sonda provádět aerobraking, tedy brzdění o atmosféru za účelem změny oběžné dráhy. V tomto případě budou hlavní roli hrát údaje z inerciálních měřících jednotek a pro korekce se použijí malé trysky.
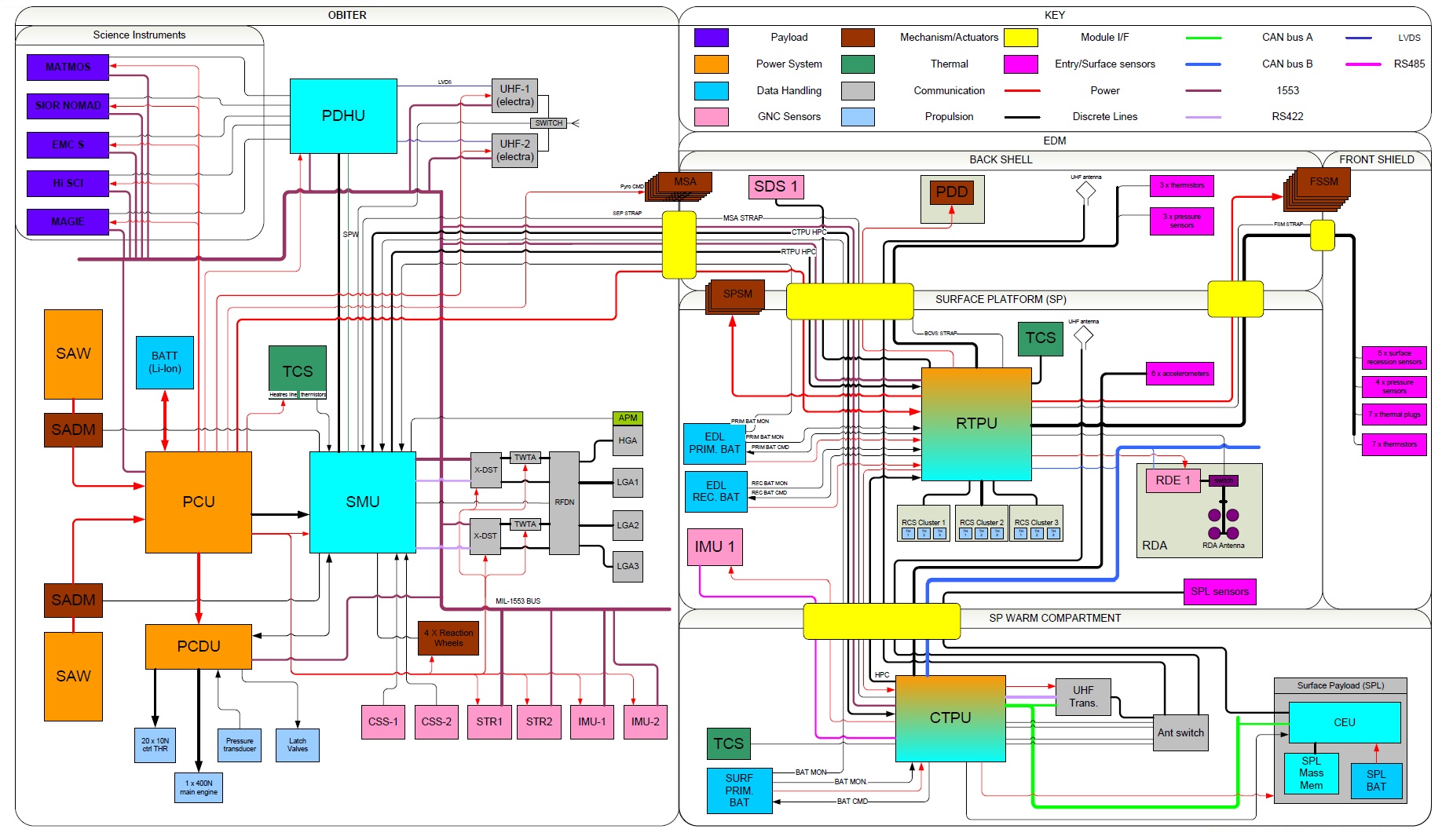
Systém řízení a nakládání s daty

Zdroj: spaceflight101.com
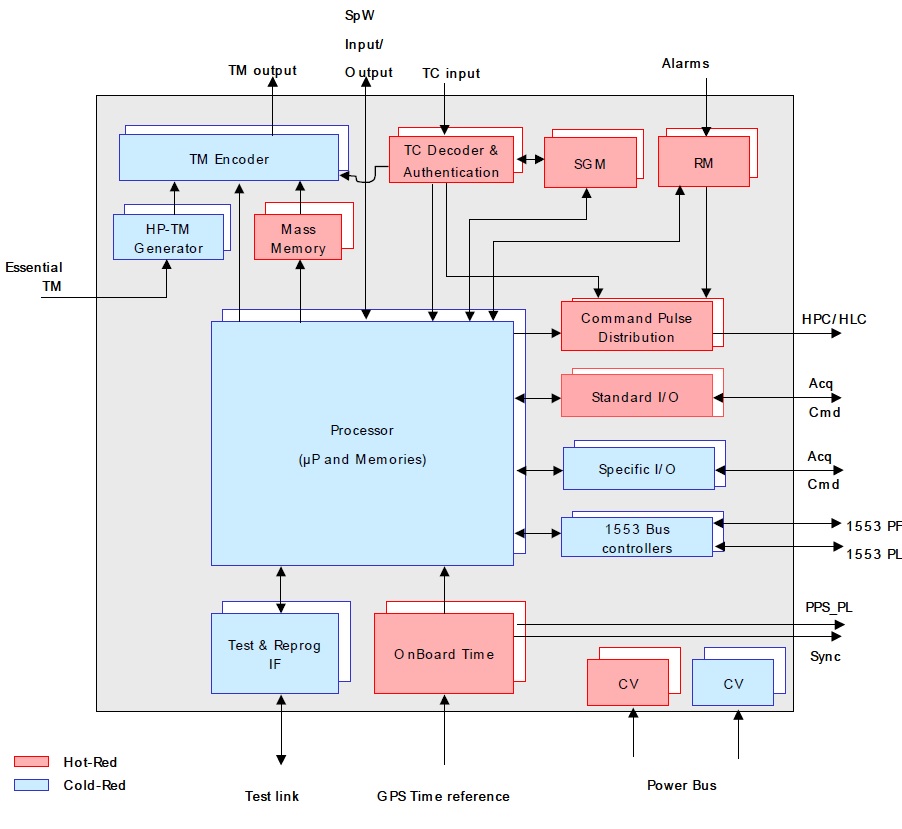
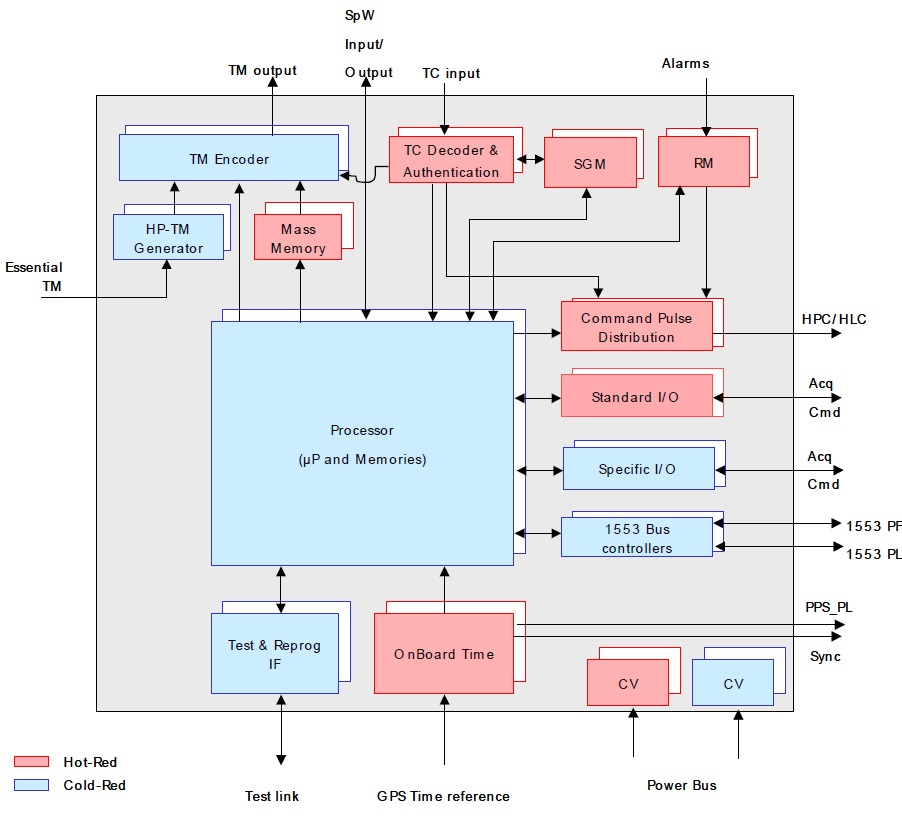
Celý systém nazývaný Command and Data Handling System se dělí do dvou základních směrů. První z nich se stará o zpracování dat, která souvisí s obecným provozem sondy TGO, druhý je pak speciálně zaměřený na datové výstupy z palubního vybavení, tedy vědeckých přístrojů. Pomyslným mozkem celé sondy je systém SMU (Spacecraft Management Unit), do kterého se sbíhají všechna datová rozhraní z různých palubních subsystémů. SMU zodpovídá za vydávání pokynů k vykonávání všech úkolů, které sonda provádí – samozřejmě v návaznosti na úkoly zaslané ze Země. SMU má na starosti, aby všechny úkoly a manévry proběhly ve správný čas, aby všechny systémy pracovaly správně a aby se data dostala na zemi – a to jak data vědecká, tak i provozní o stavu sondy, tedy telemetrie. SMU je redundantní počítač, který se skládá z několika sektorů, z nichž každý má na starosti určitou oblast. Redundance je zajištěna tím, že každý sektor je zdvojený.
Zdroj: spaceflight101.com
Celý systém SMU se skládá z centrálního procesoru a několika karet, které se starají o vstupy / výstupy dat. Dále tu najdeme řídící jednotky datových sběrnic 1553, palubní časovače, zkušební datové linky, řídící jednotky elektrických sběrnic, systémy detekce chyb, telemetrické enkodéry, pokynové enkodéry a dekodéry, paměťové moduly a mnoho dalších komponentů.
SMU zodpovídá za obdržení pokynů ze Země, jejich dekódování a zpracování, dále generování údajů pro přenosy telemetrie, kódování a modulace signálu, synchronizace časovačů, správa datových úložišť, nebo monitorování a kontrola palubního vybavení. Systém SMU navíc posílá pokyny systémům SADM (naklánění solárních panelů), PCU (kontrola množství energie), PDHU (zpracování dat), nebo pohonnému a kontrolnímu systému. SMU má na starosti i správu časové osy cleé mise – stručně řečeno provádí pokyny s přesně daným časem, což vyžaduje přesnou synchronizaci všech systémů se Zemí.
Systém SMU ovládá palubní systémy ve všech fázích letu – od startu, přes přeletovou fázi v meziplanetárním prostoru, vstup na oběžnou dráhu, aerobraking a hlavní vědecké operace. Každá z těchto fází vyžaduje trochu od SMU trochu jiné systémy řízení. S tím souvisí i ochrana systému, který při obdržení pokynu vždy automaticky zkontroluje, zda jede o platný pokyn, který přísluší k aktuální fázi mise.

Zdroj: spaceflight101.com
Na palubě sondy TGO funguje autonomní systém detekce chyb, který dokáže objevit problém, izolovat poškozenou oblast a přepnout na záložní systém. Pokud tedy dojde k nějakému náhlému výpadku, systém se postará o přepnutí na zálohu, takže všechny systému budou pokračovat v práci bez přerušení. V počítači SMU běží programy, které kontrolují řízení a navigaci sondy, nebo se starají o tepelné hospodaření. I tyto programy dokáží přepínat mezi různými verzemi pro různé fáze mise. Tohle bude důležité třeba po oddělení EDM, kdy se výrazně změní hmotnostní charakteristiky celé sondy.
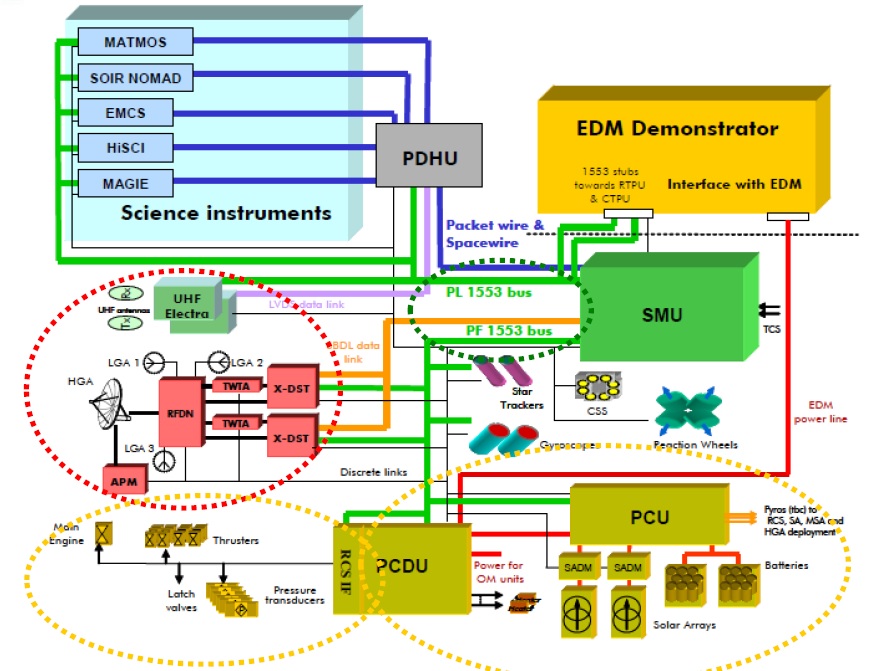
Systém pro práci s daty PDHU (Payload Data Handling Unit) je propojen s pěti přístroji na sondě a dvěma rádii Electra UHF (viz dále) přes sběrnice 1553 pro přenos pokynů a sběr telemetrických dat. Kromě toho se používá vysokorychlostní sběrnice SpaceWire pro přenos vědeckých dat. Pro spojení PDHU a Electra UHF se používá také LVDS, samotná PDHU komunikuje s hlavním systémem SMU přes sběrnice 1553, SpaceWire a další linky.
Hlavním úkolem PDHU je sběr dat z palubních vědeckých přístrojů a přes Electra UHF i z modulu EDM a jednou třeba i z roveru. Kromě toho v něm najdeme úložiště o kapacitě 128-Gbit. PDHU také bude ukládat data obdržená ze Země určená pro budoucí vozítko – opět přes Electra UHF rádio. Je samozřejmé, že se zde uloží i balíčky, které pošle lander EDM i budoucí rover, včetně dat ze samotných přístrojů na sondě předtím, než se odešlou na Zemi.
Komunikace

Zdroj: spaceflight101.com
Sonda TGO kombinuje vysokorychlostní komunikační systém s všesměrovou, nízkoziskovou komunikací, která bude udržovat obousměrné spojení se Zemí, přenos vědeckých i technických údajů na Zemi a pokynů i úkolů směrem opačným. Sonda disponuje vysokoziskovou parabolickou anténou o průměru 2,2 metru, která pracuje v pásmu X. Pro jistotu je zde i záložní systém transpondérů, přepínačů a 65 wattových zesilovačů. Tři nízkoziskové antény jsou napojeny na stejné systémy v pásmu X a mají zachycovat málo častá vysílání. Podle plánu by měla sonda TGO posílat v reálném čase telemetrické údaje hlavně během kritických fází mise. Za běžného provozu se budou data ukládat do palubní paměti a k jejich odeslání dojde v předem naplánovaných komunikačních oknech.
Electra UHF
Dvojice rádií Electra UHF pochází od NASA a slouží jako komunikační terminál na oběžné dráze. Stručně řečeno zajišťují přenos dat mezi Zemí a americkými (zatím) i evropskými (v budoucnu) rovery na povrchu Marsu. Systém Electra se používal už na minulých misích u Marsu a v průběhu let se stal standardem pro přenos dat z vozítek na povrchu planety.

Zdroj: spaceflight101.com
Celý terminál Electra se skládá z dvouvláknového UHF transceiveru, duálního vláknového ultrastabilního oscilátoru pro přesnou navigaci a určení místa na povrchu a nízkoziskové UHF antény, která bude mířit k Marsu. Srdce tohoto systému se nazývá EUT (Electra UHF Transceiver). Je to plně překonfigurovatelný transceiver, který pracuje v rozmezí 390 – 450 MHz. EUT se skládá ze čtyř platforem, které tvoří základ modulárního designu – každá platforma má jiné úkoly.
- Filtrovací a přepínací jednotka
- Přijímač /modulátor
- Baseband procesor (zpracovává signál a umožňuje komunikaci v reálném čase.)
- Zesilovač
Oscilátory poskytnou stabilní frekvenční referenci pro EUT a SDST (Small Deep Space Transponder), tedy malé transpondéry pro použití v hlubokém vesmíru. Kromě toho poskytuje stabilní časovou referenci, která se může použít při synchronizaci palubních systémů, což je nutný krok před prováděním úkolů, které mají přesně daný časový harmonogram. Samotná anténa je odvozena z minulých letových modelů a její typ se označuje jako quadrafillar helix.
Electra měří 17 x 22 x 14 centimetrů, váží 4,9 kilogramu a je uložena v hořčíkové skříni potažené zlatem. Tepelná kontrola se provádí pomocí odnímání tepla na spodní platformě celé jednotky. Jakmile sonda vletí do oblasti, ze které je výhled na rover na povrchu, jednoty Electra na obou strojích naváží komunikační spojení. Podle očekávané geometrie konkrétního přeletu monitoruje Electra na orbiteru sílu signálu a zajišťuje přenos dat s různými charakteristikami signálu podle toho, jak daleko se obě tělesa nachází. Samotná přenosová rychlost mezi TGO a povrchem Marsu kolísá od nejhoršího 1kb/s až po 2 048 kb/s při optimálních podmínkách.

Zdroj: spaceflight101.com
Údaje, které Electra zachytí se uloží do palubní paměti a pošlou se na zemi pomocí výše popsané antény v pásmu X. Tento sytém umožňuje vozítkům na povrchu Marsu přenášet velké objemy dat včetně těch vědeckých, ať už jde o fotky, nebo telemetrii, které by nebylo možné poslat přes jejich vlastní komunikační jednotky pro přímé spojení se Zemí. Ty by totiž dosáhly pouze zlomkové rychlosti ve srovnání s přenosem na sondu na oběžné dráze. Jelikož bude sonda TGO obíhat na nízké oběžné dráze, bude se jednat o ideální prostředek pro sběr dat z roverů. Malá vzdálenost totiž vyhovuje použitému pásmu UHF.
První díl našeho seriálu Pohled pod kůži končí a doufám, že se Vám líbil. Považuji za důležité upozornit, že při překladu anglického originálu jsem narazil na několik odborných pasáží, se kterými jsem si příliš nevěděl rady a překlad tak vznikal za pomoci vyhledávání různých odborných termínů na internetu. Nedopatřením jsem se tak mohl dopustit špatného, nebo nepřesného překladu některých pasáží. Pokud k tomu došlo, pak se omlouvám a samozřejmě ocením zpětnou vazbu od čtenářů, kteří jsou v technických oborech zběhlejší – případné chyby v překladu pochopitelně po jejich upozornění opravím.
Zdroje informací:
http://spaceflight101.com/
Zdroje obrázků:
http://spaceflight101.com/…/sites/79/2016/03/ExoMars_Trace_Gas_Orbiter-1.jpg
http://spaceflight101.com/…/sites/79/2016/03/20140204_OHB_ExoMars_Doku_109_f840-1.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/TGO-FBD.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/Trace_Gas_Orbiter.jpg
http://spaceflight101.com/…TGO_core_module_integration_TAS_Nov2014_6_1000.jpg
http://spaceflight101.com/…/sites/79/2016/03/20140204_OHB_ExoMars_Doku_109_f840-2.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/TGO-Prop.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/TGO-PyroIsol.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/TGO-RCT.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/TGO-RCTcluster.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/TGO-ME.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/STT.jpg
http://spaceflight101.com/…/sites/79/2016/03/CSS-objectives2_hres.jpg
http://spaceflight101.com/…/sites/79/2016/03/space-wheel-RDR_690x364.jpg
http://spaceflight101.com/…/Trace_Gas_Orbiter_with_Schiaparelli_white_background.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/SMU-12.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/SMU-1.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/Avionics.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/HGA.jpg
http://spaceflight101.com/…/sites/79/2016/03/TGO_Electra_radios.jpg
http://spaceflight101.com/exomars/wp-content/uploads/sites/79/2016/03/7140541_orig.jpg




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Díky za skvělý a podrobný článek.
Chybí mi ale (zatím) informace o jednom velmi zajímavém aspektu mise, a to je, pokud se tedy nepletu, roční brždění sondy, potřebné pro přechod na nízkou kruhovou oběžnou dráhu.
Docela zajímavé bylo i urychlení sondy několika oblety Země, vždy se zážehem Briz-M v perigeu, ale roční brždění je poměrně atypický jev. Chápu to u sondy s iontovým motorem, který má minimální tah. Zde jde ale o aerobraking sondy bez štítu, a to je věc, která by stála za podrobnější popis. Jak sonda orientuje solární panely přitomto manévru atd. Zajímalo by mne, kolik paliva se tímto manévrem dá ušetřit, když konstruktéři obětovali jako protihodnotu rok života sondy.
Brzdící proces mj. vyžaduje hodně přesnou navigaci, aby každý další průlet horními vrstvami atmosféry byl bezpečný. Každý další oblet se liší, a je třeba znovu přesně korigovat dráhu, a to nemluvím o tom, že se do cesty občas pletou ještě dva měsíce. Vidím to tak, že si řídící středisko „posichrovalo dostatek práce na rok 2017“.
Moc zajímavý je popis jednotlivých režimů sondy, ale bylo by dobré uvést třeba i to, co sonda umí či neumí dělat najednou. Mám na mysli třeba to, že pro orientaci vysokoziskové antény na Zemi se asi točí celou sondou, a nejde tedy současně použít hlavní motor. Kromě práce motoru je asi spojení se Zemí omezené i při jiných situacích. A zajímalo by mne například, jak dlouho trvá otočit sondu z jedné polohy do jiné apod.
A abych nezapomněl, tak ty gyroskopy asi nebudou mít 7500 ot/s, to je trochu moc, půjde spíš o 7500 ot/min.
V první řadě díky za upozornění na otáčky – opraveno.
Ohledně zbytku – začnu trochu zeširoka. Při čtení Vašeho dotazu jsme si vzpomněl na několik let starou diskusi se svým nadřízeným, který mi jako začínajícímu redaktorovi říkal, že správná reportáž má být udělaná tak, aby po jejím zhlédnutí neměl divák žádné doplňující dotazy. Oponoval jsem mu, že diváky / čtenáře může doplňující otázka napadnout vždy bez ohledu na délku reportáže. Dnes jsem si na ten rozhovor vzpomněl. 🙂
Do článku toho víc nacpat nešlo. Už teď je jeho rozsah na hranici. Víc už by se četlo špatně. Článek se proto nezaměřuje na vlastní provoz sondy, ale „jen“ na popis jejích systémů – i tak to vydalo na téměř 3500 slov. Do budoucna se této misi budeme určitě ještě věnovat a zcela jistě vyjde i článek, který rozebere Vámi zmiňované úpravy oběžné dráhy.
Otázky, které si kladete jsou jistě zajímavé, leč hodně detailní, takže se omlouvám, ale odpověď na ně neznám.
Myslim, ze tento portal je hodne odlisny a doplnujuce otazky, ktore trebars zodpovie niekto iny v diskusii su priamo ziaduce 🙂
Výtečné, více takových článků! 😉 Těším se na podrobný rozbor třeba Space Shuttle 😉
Díky za pochvalu, momentálně s takovými články počítáme spíše u aktuálně vypouštěných strojů.
Úžasně obsáhlý článek, děkuji! Člověk si tak udělá mnohem lepší představu, jak je taková sonda složitá a proč je tak drahá.
K překladu bych měl poznámku hlavně k nadužívanému slovu „linka“. V češtině se používá především pro datová spojení někdy pro vysokonapěťová vedení, ale ne pro nízkonapěťové nebo pneumatické rozvody. Asi by bylo lepší použít vedení, větev nebo okruh. Jinak by se asi pár dalších drobností a překlepů našlo, ale vzhledem k objemu a hustotě článku je to dobrá práce.
Díky za postřeh, opravím to.
Parádní dávka informací. Pro jedno ráno snad až moc. Slova o „rozpitvání“ nebyla přehnaná 🙂 Díky za to. Ono je možná na jednu stranu i dobře, že podobně významných a hlavně nesériových misí je do roka jen pár a je tak možnost se na každou pořádně soustředit. Těším se na EDM.
Díky za pochvalu. V dalším díle budou vědecké přístroje na TGO, pak přijde konstrukce EDM a pak přístroje na EDM.
Dal bych přednost kratšímu článku s jedním přístrojem / systémem po delší čas. Sonda letí k Marsu půl roku, mohl být jeden článek týdně a ExoMars by byl stále na očích.
Zase až tak dlouhý seriál z toho děla nechceme. Ale díky za tip.
Super článek, nemám slov.
Díky za pochvalu. 🙂
Čistě pro statistické účely dumám, zda sondu TGO + EDM lze považovat za společnou misi ESA a Ruska. Rusko se sice také podílí přístrojově, ale mezinárodní účast lze nalézt u více sond a přesto se uvádí obvykle jen NASA, ESA atd., tedy ten, kdo vytvořil sondu jako takovou. Druhá část programu bude jasná spolupráce (plošina + rover), ale tady bych to viděl na samotnou ESA.
Chápu, jak to myslíte, ale je potřeba nezapomínat, že Rusko v tomto případě zajistilo kromě přístrojů i nosnou raketu.
Rusko poskytlo nosné rakety i pro Gaiu a oba Expressy, na Venus se i drobně podílelo přístrojově a přitom jsou všechny brány jen jako mise ESA. Ale dejme tomu, že tady máme raketu, důležitý přístroj a hlavně program ExoMars jako celek je společná akce. Tak a je v tom pořádek 🙂
Gaia startovala na Sojuzu z Kourou, takže je to spíše evropská raketa. Uznávám, je v tom trochu nepořádek, ale zase nemíchejme jablka s hruškami. 🙂
A jo. Díky za upozornění. Příliš jsem se upnul na ten Sojuz a unikla mi „drobná“ nuance.
Uzasny clanek. Mel bych jen dva dotazy k pohonemu systemu:
1. Tlakovani do trysek zajistuje jen helium a neni zde zadne turbocerpadlo? A obecne, pokud mam turbocerpadlo (predevsim v nosne rakete) proc musim jeste tlakovat heliem (kor kdyz napriklad F9 odpousti tlak kvuli vyparovani kysliku).
2. Pokud tlakuji heliem jak je zajisteno ze se mi helium nepromisi s palivem a u vyvodu nevznikne heliova bublina, nebo dokonce aerosol paliva a helia (coz by urcite ovlivnilo smesovaci pomery v trysce). U pracujiciho nosice to chapu, zrychleni drzi palivo u spodnich ventilu a myslim ze jsem nekde cetl (mozna u saturnu – ale to neodprisahnu) ze druhy stupen pro dalsi zazehy mel male jednorazove trysky aby pred znovuzazehnutim se dal nosic do byt maleho pohybu a palivo se tim padem posunulo k spodnim ventilum.
Díky za pochvalu a nyní k dotazům:
1) na drtivé většině sond se k tlakování pohonného systému nepoužívá žádné turbočerpadlo, ale pouze tlakovací helium. Přirovnání k Falconu není moc dobré, protože Falcon používá kapalný kyslík s mnohem nižší teplotou, který se tak snáze odpařuje a musí proto odpouštět přebytky tlaku. navíc sondy nemají takové palivové nároky jako rakety, které potřebují nahnat do spalovací komory co nejvíce paliva za krátký čas.
2) U většiny sond (předpokládám, že i u TGO) je vlastní palivo v nádrži od tlakovacího hélia odděleno pružnou membránou. helium tak na tuto stěnu tlačí a tím vypuzuje palivo / okysličovadlo výstupem ven.
Jen doplním, že ty malé motorky pro „setřesení paliva“ byly u 2. a 3. stupně Saturnu skutečně používány, jejich označení zní „ullage rockets“ nebo „ullage motors“.
A mám dojem, že se občas snad používají ještě dnes.
Nádrž se tlakuje i v případě, že samotný motor zásobuje turbocerpadlo. Čerpadlu by dělal problémy rychlý pokles tlaku v nádrži, obsah by se při snížení tlaku pod nějakou hranici začal vařit a mohla by se zhroutit i samotná nádrž konstruována na přetlak.
Super! Super! A ešte raz super!
Presne takýto typ článkov sa mi páči. Je v ňom obsiahnutých veľa faktov a informácii. Pre mňa je to prečítanie na viackrát a aj samostatné študovanie(hlavne internet). A dĺžka článku mi vôbec nevadila.
Dugi, na to aký to bol náročný preklad, si sa ho zhostil výborne.
Chcem sa spýtať – hmotnosť sondy 4332 kg je s palivom alebo bez paliva? A ten nosný skelet v podobe valca sa používa aj pri iných sondách? Alebo sa spýtam inak – na nosnú konštrukciu sa používa aj niečo iné ako valec?
Díky moc za pochvalu, těší mne, že se článek líbí. Jak jsem psal v závěru – některá místa překladu byla hodně náročná a bál jsem se, abych neudělal chybu.
Ta váha je i s palivem – je to kompletní hmotnost při startu.
Válec je spíše výjimka, družice mají většinou nosný samotný skelet kvádru těla.
Prave naopak, u sond z poslednich dvou desetileti je velmi casto hlavni nadrz paliva umistena v tezisti a obepina ji valcova nosna struktura, ne kterou jsou napojeny dalsi prvky nosne konstrukce, viz napriklad Maven: http://marsmobile.jpl.nasa.gov/images/Core-Structure-Tank-br2.jpg
Já bral sondy a družice obecně – tedy i telekomunikační, kde se tato metoda (pokud vím) moc nepoužívá. Ale máš pravdu, že jsem měl svou pozornost zaměřit spíše na meziplanetární sondy, kde je to tak, jak píšeš.
Plati to obecne pro vsechny mnohatunove satelity, vcetne tech komunikacnich na GEO, kde je hlavni hmotnostni polozkou palivo, viz napr:
APSTAR-9 https://www.nasaspaceflight.com/2015/10/apstar-9-chinas-long-march-3b/
Díky za info.
Schémata,popisy a hromada googlení…co víc si přát? Články kde se vněnujete planetologii a částečně i sondám mě osobně také baví číst. Ale tohle a ještě například kosmický šatník nebo kosmická strojovna to jsou moji favoritové. Nevím jak těžké je zhánět takové technické údaje o starších strojích, ale určitě bych o tom popřemýšlel. No ať budete psát o čemkoliv jsem moc rád, že tu je a bude takový seriál. Protože technická stránka kosmonautiky to je něco úchvatného, a vlastně i jak jsem o ni získal zájem. A těším se na článek o vědeckých přístrojích.
PS: Proč není článek „Raketové počítání snadno a rychle“ v seriálu Pro začátečníky. Píšu to jenom, že jsem asi 5 min. hledal než mi došlo, že tam není. 😀
To mám opravdu vlekou radost, že se Vám článek líbil. Přiznám se, že překlad nebyl úplně snadný a proto mne úspěch u čtenářů těší dvojnásob.
Díky za informaci, článek Raketové počítání snadno a rychle jsem doplnil do výčtu seriálu. 😉
Moc hezký článek, přesně takovéto články mám nejraději. Mám ale ještě dotaz nepsalo se tam více o procesoru, jak je silný a zda byl použit jen program na řízení všeho, nebo zda šlo o nějaký druh operačního systému?
Hezký den,
díky za pochvalu, ale bohužel tyto informace ve zdrojovém článku chybí, jinak bych je sem přeložil také.
Super článek.
Tady je obecný popis platformy :
http://www.ruag.com/fileadmin/ruag/Divisions/Space/Products/Digital_Electronics_for_Satellites___Launchers/Data_Handling_Systems/PDF/Command_Data_Handling.pdf
Díky za pochvalu i za odkaz!
„nízkonapěťová diferenciální signální linka“ je hádám obyčejné LVDS, aneb tohle se nepřekládá, kdo to zná, tomu to dojde z označení LVDS snáz, kdo neví o co jde, tomu to nepomůže. Ale některé věci se mi nepodařilo identifikovat, typicky „duálního vláknového ultrastabilního oscilátoru pro přesnou navigaci“, trochu mi to připomíná „dělový spojovač 25 špendlíků“, ale tady opravdu nemám nápad co by to mohlo být. Jinak předpokládám, že ty electry jsou nějaké sdr, dávalo by to smysl, ale ten popis částí je celkem zavádějící. Tam je vůbec hodně otázek, například jak kompenzují dopler, to už na těchto pásmech nebude nic jednoduchého a tak široké, aby se na to šlo vyprdnout, to nebude. Ono vůbec u toho označení „dvouvláknový uhf trx“ docela tápu co to je. Není od toho někde popis?
Komunikace k zemi je také nejasná. Předně, X pásmo je široký pojem, záleží na tom, zda o X pásmu mluví vojáci, civilové, letectvo, nebo nasa, takže mám raději kmitočet, nicméně předpokládám, že to bude kolem 7GHz, ale jistotu nemám. 60W na konci opravdu není moc, když uvážím, že průměrný geostacionár je na tom minimálně o 6dB líp.
Díky za poznámky – v prvním případě se v originále opravdu vyskytuje Low Voltage Differential Signaling line. Nevěděl jsem, že jde o terminus techicus, který se nepřekládá – opraveno.
Na zbytek otázek Vás odkážu na zdrojový článek, ze kterého jsem překládal – http://spaceflight101.com/exomars/trace-gas-orbiter/
Pro vsechny prakticke pohledy lze v tomto kontextu „dual-string“ chapat jako dvojity, zdvojeny atd. Proste ten trx je tam dvakrat, stejne jako casova zakladna.
Doppler IMHO kompenzuji naprosto trivialne, protoze se jedna o zcela sw radio, takze proste posunou vlastni nosnou podle potreby.
Ja bych mel spis na Dusana jinej spek:
„Každá nádrž pojme 1207 litrů a když TGO startovala, měla na své palubě 1000 kilogramů paliva a 1500 kg okysličovadla.
?? 🙂
Vazne je to vhodny zpusob popisu?
… btw prumerny geostacionar je 36.000 km vysoko, TGO ma orbitu ve stovkach km, takze to mame… 36x vyssi efektivni vykon nez prumerny geostacionar, a to neresim atmosferu.
(preklep – 16x)
Zase to nepřehánějte. Nebo vám někdo spočítá chybějící diakritická znaménka. I ta patří k textu od inteligentního člověka.
Lide jsou ruzni, nekdo nepouziva diakritiku, nekdo mozek…