Príprave sondy Tianwen-1 na štart už bol síce venovaný článok (vtedy ešte mala meno HuoXing-1), ale v tomto sa zameriame na jej užitočné zaťaženie. Svoje meno dostala v súlade s novým systémom pomenovania čínskych sond určených na prieskum Slnečnej sústavy. Tianwen-1 je prvá z nich a súčasne je prvou, ktorá bude skúmať Mars. Navrhnutá je tak, že obsahuje orbiter, lander a rover a jej štart je naplánovaný na rok 2020. Sonda bude vykonávať globálny a komplexný prieskum červenej planéty z jej obežnej dráhy pomocou orbiteru a podrobný plošný prieskum v záujmových oblastiach pomocou roveru. Misia sa skladá sa z piatich častí – ide o pohonný systém; telemetriu; systém sledovania a velenia; pozemný segment a aplikačný systém. Oficiálne schválenie misie padlo v januári 2016, pričom sa počíta s vypustením sondy v štartovacom okne 23.7.2020 so záložným termínom 24. a 25. júla 2020.
Zdroj: https://pbs.twimg.com/
Sonda poletí v celku až k svojmu cieľu kde sa pomocou motorického manévru dostane na jeho obežnú dráhu. Následne sa oddelí pristávacia platforma s vozítkom. Okrem vlastného vedeckého programu bude orbitálna časť sondy slúžiť aj ako retranslačná stanica so Zemou. Po rozdelení orbiter vystúpi na vyššiu obežnú dráhu.
Zvyšok pokračuje vstupom do marťanskej atmosféry podľa vopred určeného postupu, ktorý zahŕňa viacnásobné spomalenie až nakoniec lander mäkko dosadne na povrch. Po bezpečnom pristátí rover zíde z pristávacej platformy a začne jeho vedecký výskum na povrchu. Na začiatku je prvoradou úlohou orbitra poskytnúť prenosové komunikačné spojenie s vozítkom pri vykonávaní jeho vedeckého prieskumu. Po uplynutí 90 solov (jeho predpokladaná životnosť) zmení orbitálna časť sondy obežnú dráhu na takú, z ktorej bude vykonávať vlastný vedecký prieskum. Následne sa prijaté vedecké dáta budú analyzovať a interpretovať ich výsledky.
Zdroj: https://pbs.twimg.com/
Vedecké ciele
Zdroj: https://pbs.twimg.com/
Táto misia bude najprv vykonávať globálny a všeobecný prieskum z obežnej dráhy. Následne sa prieskum zameria na detailné skúmanie vybraných oblastí s vysokou presnosťou a rozlíšením. Predmetom výskumu je nasledovné:
Štúdium morfológie a geologickej štruktúry a skúmanie príčin ich vývoja. Určenie topografie, pričom v záujmových oblastiach bude vykonaná s vysokou presnosťou. Na tieto úlohy je určená kamera so stredným rozlíšením a kamera s vysokým rozlíšením. Prvá z nich dokáže určiť detaily o rozmere 100 m, pričom druhá je určená na získanie detailov pristávacej oblasti (okrem iného) o veľkosti cca metra. Tieto dáta budú použité na analýzu procesu formovania geologických útvarov ako sú napr. riečne korytá, sopky, dôsledky pôsobenia veternej erózie, vplyv impaktov, chovanie polárnych čiapočiek a pod.
Ďalej je to výskum povrchovej pôdy a distribúcie vody a ľadu. Úlohou bude zistiť rôzne typy pôdy, jej zvetrávania a globálnej distribúcie materiálu. Má hľadať vodný ľad a určiť profil povrchových vrstiev. Na tento prieskum sú určené podpovrchové radary. Porovnanie dát z oboch vedeckých prístrojov umožní lepšie pochopiť rozloženie povrchových vrstiev a presnejšiu detekciu vodného ľadu. Použitie dvoch prístrojov umožní vytvoriť podpovrchový 3D model.
Aké zloženie majú povrchové materiály, nám pomôžu určiť tri vedecké prístroje. Ich úlohou je identifikovať typy hornín a minerálov na povrchu a ich zloženie. Ide o spektrometer, multispektrálnu kameru a krátkovlnný infračervený spektrometer. Pomocou týchto vedeckých prístrojov je možné skúmať prostredie, ktoré v minulosti interagovalo s vodou, t.j. budú sa hľadať uhličitanové minerály, chlorečnany, kremičitany, hydrogensírany a zvetrané minerály ako hematit. Výsledky tohto prieskumu poslúžia na štúdium vzťahu medzi vodou a týmito minerálmi v čase.
Vedcov zaujíma aj atmosféra, jej klíma a faktory, ktoré ju ovplyvňujú. Rovnaký predmet záujmu predstavuje aj ionosféra. Ich výskum bude pozostávať z monitorovania vesmírneho počasia a zjednodušene povedané z meteorologickej stanice na povrchu. Pôjde o meranie teploty, tlaku, rýchlosti a smeru vetra a sezónnych zmien počas ročných období. Budú sa skúmať aj profily ionosféry. Na starosti to budú mať meteorologické prístroje a prístroje určené na zber a analýzu častíc. Meteorologická stanica dokáže merať teplotu a tlak vzduchu, rýchlosť vetra a jeho smer. Čo sa týka oblasti nad atmosférou, jeden prístroj bude zameraný na zistenie toku iontov, ich hustotu, teplotu ako aj typy samotných neutrálnych častíc ako sú vodík, hélium, kyslík a iné. Druhý je zameraný podobne, len sa to týka elektricky nabitých častíc ako sú napríklad elektróny, protóny, alfa častice. Pomocou nich sa určia vlastnosti ionosféry a medziplanetárneho prostredia.
Posledná oblasť bude zameraná na globálne ako aj lokálne polia Marsu a jeho vnútorné usporiadanie. V hľadáčiku bude magnetické a gravitačné pole, respektíve ich nepravidelnosti, z čoho sa dá vyvodiť rôzne rozloženie hmôt. V súčinnosti s inými prístrojmi je možné odvodiť vývoj planéty v čase. Použijú sa dva magnetometre, ktoré spolu dokážu určiť vodivosť a elektrické toky ionosféry ako aj rozloženie magnetických polí v mieste pristátia.
Pozorovacie úlohy a užitočné zaťaženie

Zdroj: https://i.imgur.com/
Vedecké prístroje na orbitálnej časti sondy pozostávajú z kamery so stredným rozlíšením (Medium-resolution Camera), kamery s vysokým rozlíšením (High-resolution Camera), podpovrchového radaru (Mars Subsurface Exploration Radar), spektrometra zameraného na analýzu minerálov (Mars Mineralogy Spektrometer), magnetometra (Mars Magnetometer), analyzátora iontov a neutrálnych častíc (Mars Ion and Neutral Particle Analyzer) a analyzátora energetických častíc (Mars Energetic Particle Analyzer).
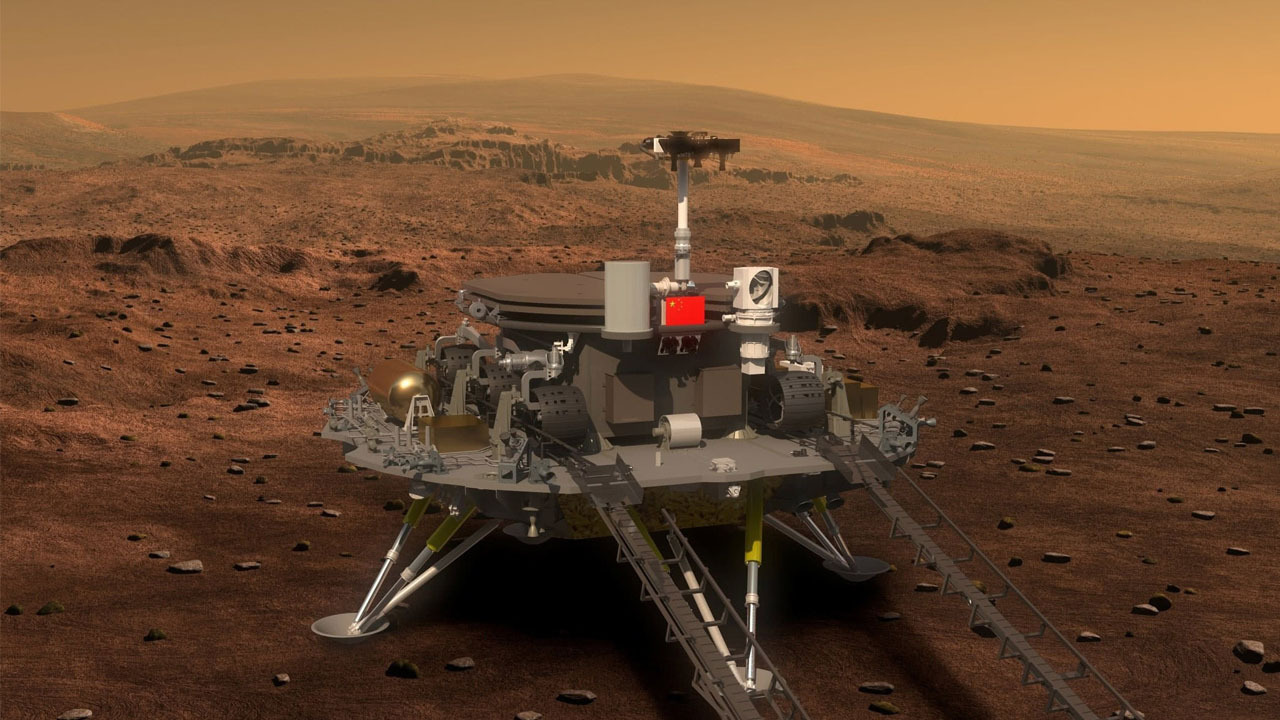
Na vozítku je inštalovaná širokospektrálna kamera (Multispectral Camera), podpovrchový radar (Subsurface Detection Radar), sada prístrojov určených na chemickú analýzu v mieste pristátia (Mars Surface Composition Detection Package), magnetometer na určenie lokálneho magnetického poľa (Mars Magnetic Field Observation Station) a taktiež sada prístrojov na meranie poveternostných podmienok (Mars Climate Station). Na orbitri aj roveri sú riadace počítače redunantné.
Špecifikácie jednotlivých prístrojov na orbitánej časti sondy:
- Kamera so stredným rozlíšením (MrC) je určená na globálne zmapovanie povrchu a jeho topografie. Je farebná (R, G, B) a bude pracovať vo viditeľnej oblasti spektra. Rozlíšenie je 100 m/pixel z výšky 400 km. Záber je široký 400 km a veľkosť snímacieho čipu je 4096×3072 pixelov.
- Kamera s vysokým rozlíšením (HrC) bude vykonávať podrobný prieskum záujmových oblastí, oblastí kde budú pozorované dynamické zmeny ako sú napríklad duny, ľadovce, lavíny. Bude snímať vyschnuté riečne korytá, respektíve oblasti so sedimentárnymi horninami, kde by sa mohla nachádzať voda. Pomocou nej sa budú študovať detaily povrchu krajiny ako sú impakty, sopky, kaňony a iné zvláštne morfologické prvky. Jej rozlíšenie je dostatočné na rozpoznanie charakteristiky terénu a tým pádom na určenie procesov akými vznikol. Monochromatické rozlíšenie z výšky 265 km je 2,5 m/pixel a farebné 10 m/pixel. Šírka pokrytia je 9 km.
- Podpovrchový radar (MSER) získa údaje ako o povrchu tak aj o podpovrchových vrstvách. Je schopný detegovať vodný ľad a jeho distribúciu. Bude pracovať v dvoch frekvenčných pásmach – 10 až 20 MHz a 30 až 50 Mhz. Detekčná hĺbka pri horninovom podloží je min. 100 m, v prípade vodného ľadu je to okolo 100 m, pričom rozlíšenie je 1 m. Citlivosť príjimača je ≤-87 dBm.
- Spektrometer zameraný na detekciu minerálov (MMS). Ako sám názov napovedá, tento prístroj je určený na analýzu minerálov a ich distribúcie po povrchu. To pomôže pochopeniu geologických dejov. Bude pracovať vo viditeľnej až blízkej infračervenej oblasti spektra 0,45 µm – 1,55 µm alebo len v infračervenej oblasti spektra 1,0 µm – 3,4 µm. Spektrálne rozlíšenie je v prvom prípade 10 nm a v druhom 12 nm.
- Magnetometer (MM) deteguje magnetické pole a v spolupráci s druhým magnetometrom (MMFOS) umiestnenom na povrchu bude schopný skúmať ionosféru a jej parametre ako je napríklad vodivosť a interakciu so slnečným vetrom. Jeho rozsah je ±2000 nT a presnosť 0,1 nT.
- Analyzátor iontov a neutrálnych častíc (MINPA) je určený na zistenie vlastností plazmy a jej interakcie so slnečným vetrom. Tieto poznatky pomôžu k pochopeniu erózie marsovskej atmosféry. Je schopný zachytávať nízkoenergetické ionty s energiami 5 eV až 25 keV, jeho zorné pole je 90°x360° a uhlové rozlíšenie je 11,2°x22,5°. V prípade nízkoenergetických neutrálnych častíc sú to energie 50 eV až 3 keV, zorné pole je 15°x160° a uhlové rozlíšenie je 10°x25°.
- Analyzátor energetických častíc (MEPA) je zameraný na častice s vyššou energiou a preskúma charakter a zmeny energetického spektra. Spolu s druhými podobne zameranými prístrojmi bude vytvárať celkový obraz o fungovaní atmosféry, a o vplyve slnečných erupcií na ňu. Z neho získame údaje o množstve a spôsobe úniku molekúl rôznych plynov. Energetický rozsah pri elektrónoch je 0,1 až 12 MeV. V prípade protónu je rozsah 2 až 100 MeV, respektíve u α-častice 25 až 300 MeV. Detektor má vo všetkých prípadoch 16 kanálov. Je schopný zachytiť prvky od vodíka až po železo alebo ich ionty.

Zdroj: https://pbs.twimg.com/
Špecifikácie jednotlivých prístrojov na roveri:
- Multispektrálna kamera (MC) bude získavať farebné fotky pristávacej oblasti, respektíve okolia roveru. Bude schopná robiť snímky v ôsmych vlnových dĺžkach – 480, 525, 650, 700, 800, 900, 950 a 1000 nm. Jej optika je nastavená na robenie záberov od 1,5 m až do nekonečna. Veľkosť snímacieho čipu je 2048×2048 pixelov.
- Radar (SDR) je schopný skúmať podpovrchové vrstvy pôdy, určiť ich štruktúru a detegovať v nej ľad. Radar môže pracovať v dvoch módoch. V prvom pracuje s frekvenciou 55 MHz, ktorá mu umožní preskúmať horninové podložie min. do hĺbky 10 m a v prípade ľadu až do min. hĺbky 100 m s rozlíšením v ráde metrov. Druhý mód pracuje s frekvenciou 1300 MHz. Pomocou tejto frekvencie „dosiahne“ do hĺbky min. 3 m v horninovom podloží a do hĺbky min. 10 m v prostredí ľadu. Rozlíšenie je v tomto prípade rádovo centimetre. Je to prvýkrát, keď je radar na detekciu vodného ľadu umiestnený na roveri.
- Zariadenie na zistenie zloženia povrchových vrstiev (MSCDP) je navrhnuté na analýzu a detekciu chemických prvkov. Vlastne sa jedná o infračervený spektrometer pracujúci v krátkej vlnovej dĺžke v rozsahu 850 až 2400 nm. Je schopný zistiť kremík, kyslík, železo, horčík, vápnik, sodík, kyslík, vodík, uhlík, mangán, titán, síru a ďalšie prvky. Má dosah maximálne 10 m ale optimom je vzdialenosť od 2 do 5 m. Jeho rozlíšenie je 0,2 mm/2 m. Zorné pole je 1 mrad a spektrálne rozlíšenie je 12 nm.
- Magnetometer (MMFOS) na roveri bude mať podobné určenie ako ten, ktorý je umiestnený na orbitri, t.j. bude zisťovať magnetické pole v mieste pristátia a v spolupráci s druhým magnetometrom (MM) bude sledovať chovanie nabitých častíc a ich vlastností. Podľa materiálu v mieste pristátia je schopný detegovať aj vnútornú štruktúru daného miesta na základe anomálii magnetického poľa. Jeho rozsah je ±2000 nT, rozlíšenie 0,01 nT a tepelná stabilita 0,01 nT/1°C.
- Meteorologická stanica (MCS) uskutoční detekciu in situ atmosférických parametrov ako je teplota, tlak, rýchlosť a smer vetra a súčasne bude monitorovať ich zvukové prejavy. Rozsah merania teploty je od -120 °C do +50 °C, pričom presnosť je 0,1 °C. Tlak možné merať od 1 Pa do 1500 Pa s presnosťou 0,1 Pa. V prípade rýchlosti vetra je to od 0 m/s do 70 m/s s presnosťou 0,1 m/s. Smer vetra je možné merať od 0° do 360° s presnosťou 5°. Zvukový frekvenčný rozsah je od 20 Hz do 20 kHz, citlivosť mikrofónu je 50 mV/Pa a dynamický rozsah je 90 dB.
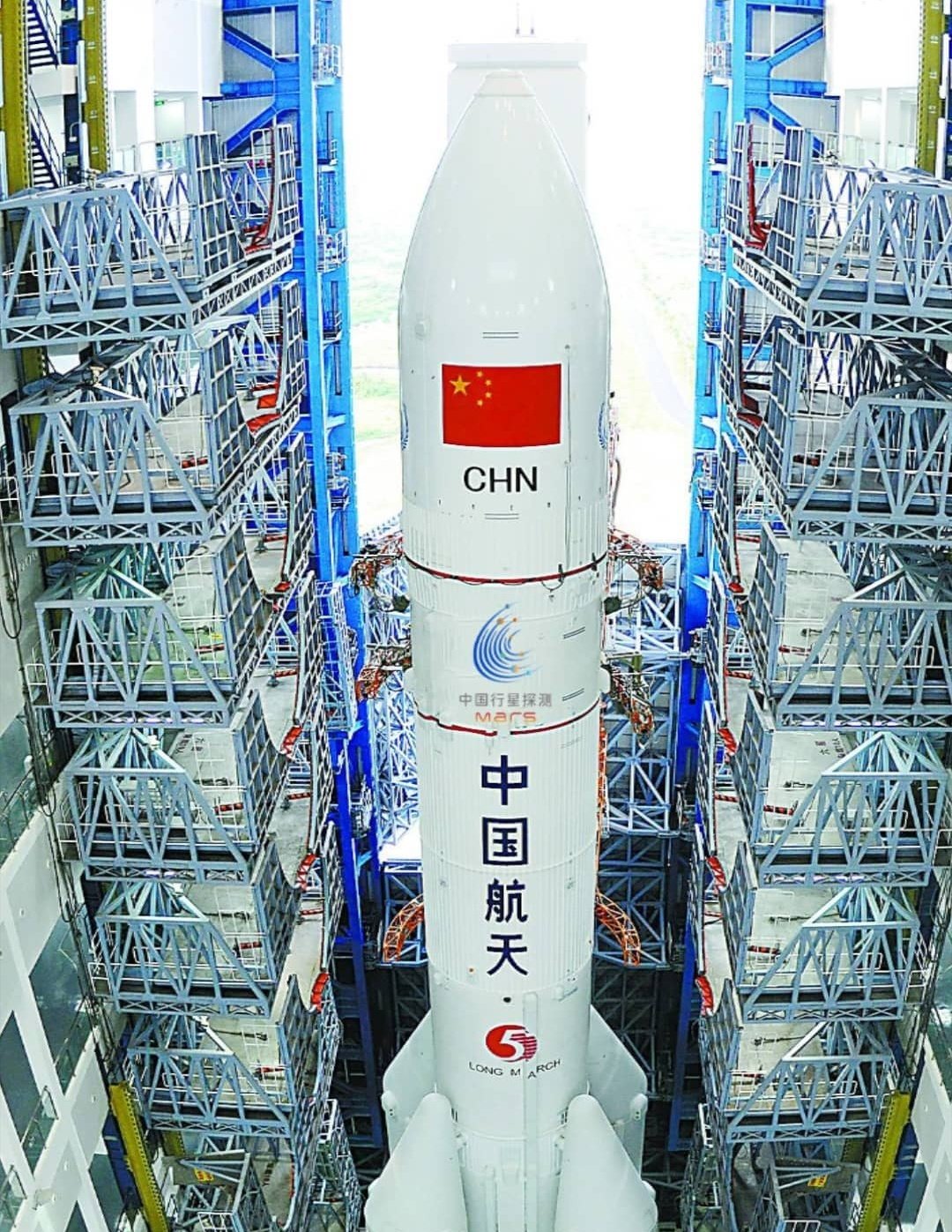
Toto sú vedecké úlohy prvej čínskej sondy Tianwen-1 k Marsu a z toho vyplývajúce návrhy vedeckých prístrojov. Na príprave misie sa podieľali aj kozmické agentúry ESA, CNES (Francúzsko) a FFG (Rakúsko). Sonda má byť vynesená pomocou v súčasnosti najsilnejšej čínskej rakety CZ-5 (4). Neostáva nám nič iné ako sa tešiť na jej výsledky.
Zdroje informácii:
https://spectrum.ieee.org/
https://www.planetary.org/
https://spacenews.com/
https://www.chinadaily.com.cn/
https://space.skyrocket.de/
http://forum.kosmonautix.cz/
Zdroje obrázkov:
https://planetary.s3.amazonaws.com/20200419_huoxing-1-hero-video-static.jpg
https://pbs.twimg.com/media/Ec6Xua0XoAE0vxv?format=jpg&name=large
https://pbs.twimg.com/media/Ec6acuTWkAAuNs8?format=jpg&name=large
https://pbs.twimg.com/media/Ec36xn-U4AAsmIK?format=jpg&name=large
https://i.imgur.com/7xXWTN5.jpg
https://pbs.twimg.com/media/EdGD503U0AE_zCa?format=jpg&name=large




{kind=link}
{kind=link}
Na misi se podílí také Evropa, konkrétně přispěla ESA, CNES a FFG.
Ďakujem za doplnenie!
Presne tak. Jasné to bolo pri uverejnení prvých fotiek aerodynamického krytu. 🙂
Ale nevedel som dohľadať podrobnosti. Informáciu doplním do článku.
ESA se podílí na pozemním komunikačním zajištění, FFG na SCI/NAV kamerách roveru a CNES dodala spektrometr LIBS pro rover.
Ešte raz ďakujem za doplňujúce informácie. 🙂
Pěkný a hutný článek. Vědecký program sondy je opravdu úctyhodný. Takže samá chvála.
Teď ještě chybí „maličkost“, že. Držím tedy palce, aby vše vyšlo.
On bude napinavy i samotny start, CZ-5 je relativne novy nosic a zatim ma 75% uspesnost(ze 4 startu byly 3 uspesne).
Frekvence startu by se mela zvysit s vystavbou cinske modularni stanice.
Přesně tak.
Som rád, že sa páčil.
V článku není uvedeno jak se na výzkumu podílí LANDER. Měl by mít alespoň kamery. Také není uvedeno jak dlouho po přistání bude v provozu a zda bude mít po přistání dlouhodobé spojení se Zemí nebo orbiterem. Pokud jeho jediným úkolem je dopravit na povrch rover, sám nebude nijak vědecky angažován a po vypuštění roveru se odmlčí neměl by být plnohodnotným landerem, pod tímto pojmem si představuji statickou výzkumnou sondu s vlastním výzkumným programem a nějakou minimální životností.
Z výzkumného hlediska, které je hlavním cílem všech misí a jejich částí, by se čínská mise, pokud se výše nemýlím, měla oficiálně skládat „pouze“ z orbiteru a roveru.
Po bezpečnom pristátí rover zíde z pristávacej platformy a začne jeho vedecký výskum na povrchu. Na začiatku je prvoradou úlohou orbitra poskytnúť prenosové komunikačné spojenie s vozítkom pri vykonávaní jeho vedeckého prieskumu. Po uplynutí 90 solov (jeho predpokladaná životnosť) zmení orbitálna časť sondy obežnú dráhu na takú, z ktorej bude vykonávať vlastný vedecký prieskum.
Tde je článek o té kameře na landeru http://www.ecns.cn/news/sci-tech/2020-07-23/detail-ifzynuei9788594.shtml
Ďakujem za odkaz. 🙂
Tak prvý dôležitý krok je za nami. Tak nech sa darí aj naďalej.
Kamera na Landeru o je ono. Co by dali Rusové za jediný snímek z povrchu.
Dík, v článku je to dobře podáno, Lander bude na povrchu pracovat, jak se zdá sice jen kamerou, což ovšem stačí, a podporovat Rover.
Takže misi lze chápat jako : družice + lander + rover.
Na landri sa bude nachádzať aj laserový diaľkomer a mikrovlnný radar.
V článku nie sú vami požadované informácie uvedené preto, lebo som ich nemal k dispozícii.
To isté sa týka aj vybavenia, resp. nevybavenia landera. Ale to sa dozvieme časom. Treba byť len trpezlivý…
Čo sa týka pomenovania „lander“, ide o vec definície.
Po bezpečnom pristátí rover zíde z pristávacej platformy a začne jeho vedecký výskum na povrchu. Na začiatku je prvoradou úlohou orbitra poskytnúť prenosové komunikačné spojenie s vozítkom pri vykonávaní jeho vedeckého prieskumu. Po uplynutí 90 solov (jeho predpokladaná životnosť) zmení orbitálna časť sondy obežnú dráhu na takú, z ktorej bude vykonávať vlastný vedecký prieskum.
Tak už letí.