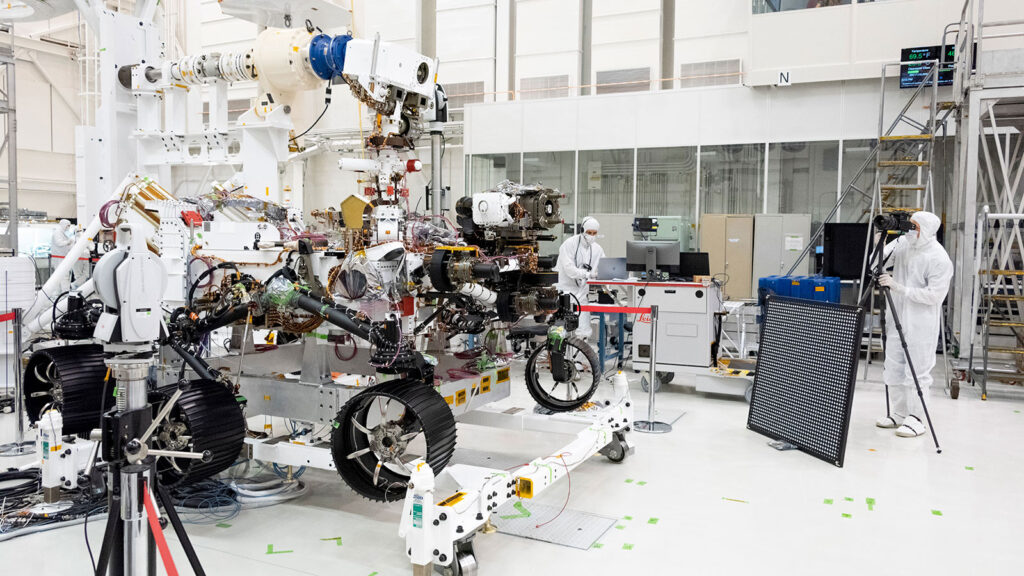
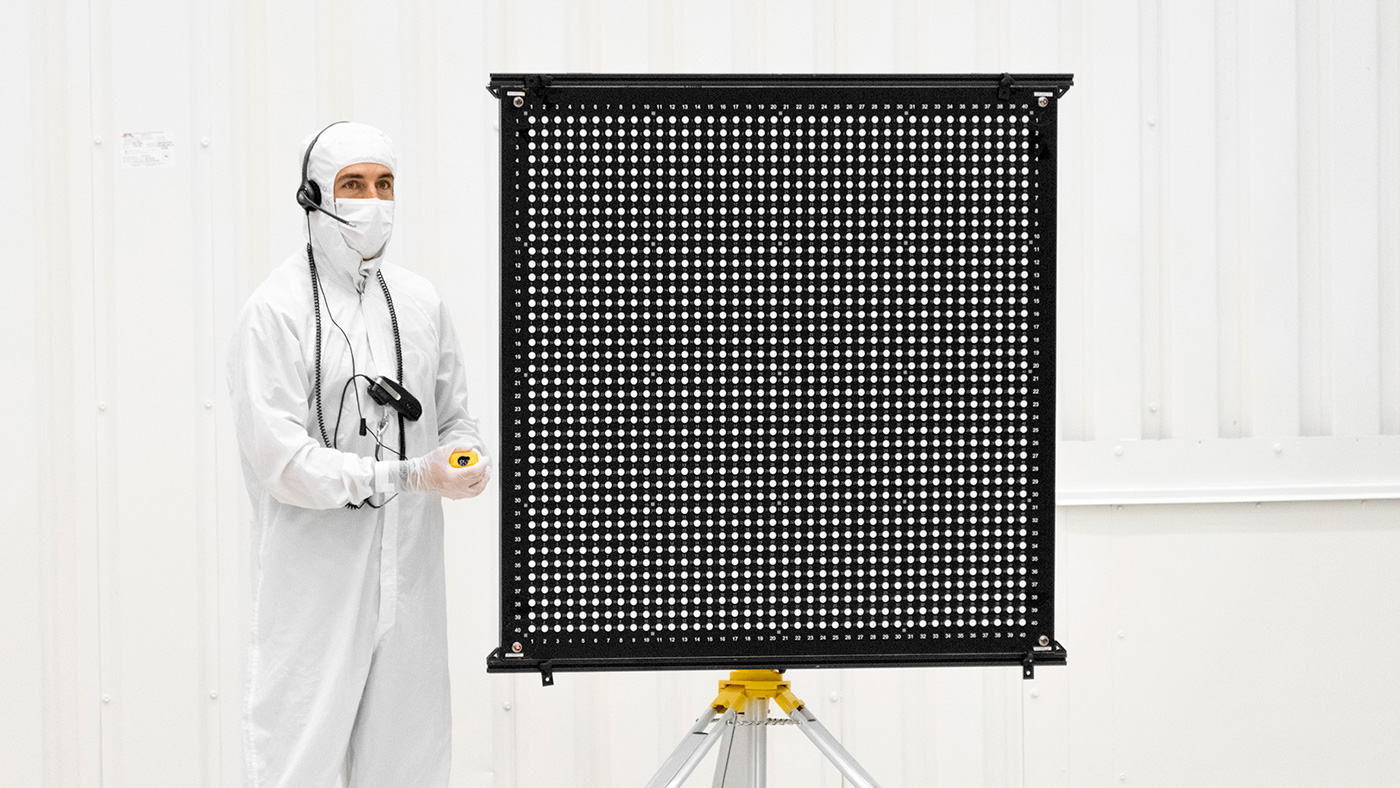
„Dokončili jsme kalibraci strojového vidění, tedy vpřed mířících kamer na vozíku,“ oznámil Justin Maki, hlavní inženýr zodpovědný za provoz snímkovacích zařízení na novém americkém vozítku Mars rover 2020 a dodává: „Tohle měření je nezbytné pro přesný stereo pohled, který je důležitou schopností tohoto roveru.“ K samotné kalibraci použili členové týmu speciální desku pokrytou polem teček. Tuto desku pak umístili do vzdálenosti 1 – 40 metrů od kamery a sledovali kvalitu pořízených snímků.
Zdroj: https://www.nasa.gov/
Jelikož známe pozici teček, je možné z analýzy snímků zjistit, jak fungují kamery. Při testech se potvrdilo, že výsledky odpovídají předem definovaným požadavkům z hlediska rozlišení a geometrické přesnosti. Vozítko je vybaveno hned několika kamerami a zkouškou zraku prošla velká část z nich. Konkrétně dvě kamery Navcam, čtyři kamery Hazcam, kamera SuperCam a dvě kamery Mastcam-Z.

Zdroj: https://www.nasa.gov
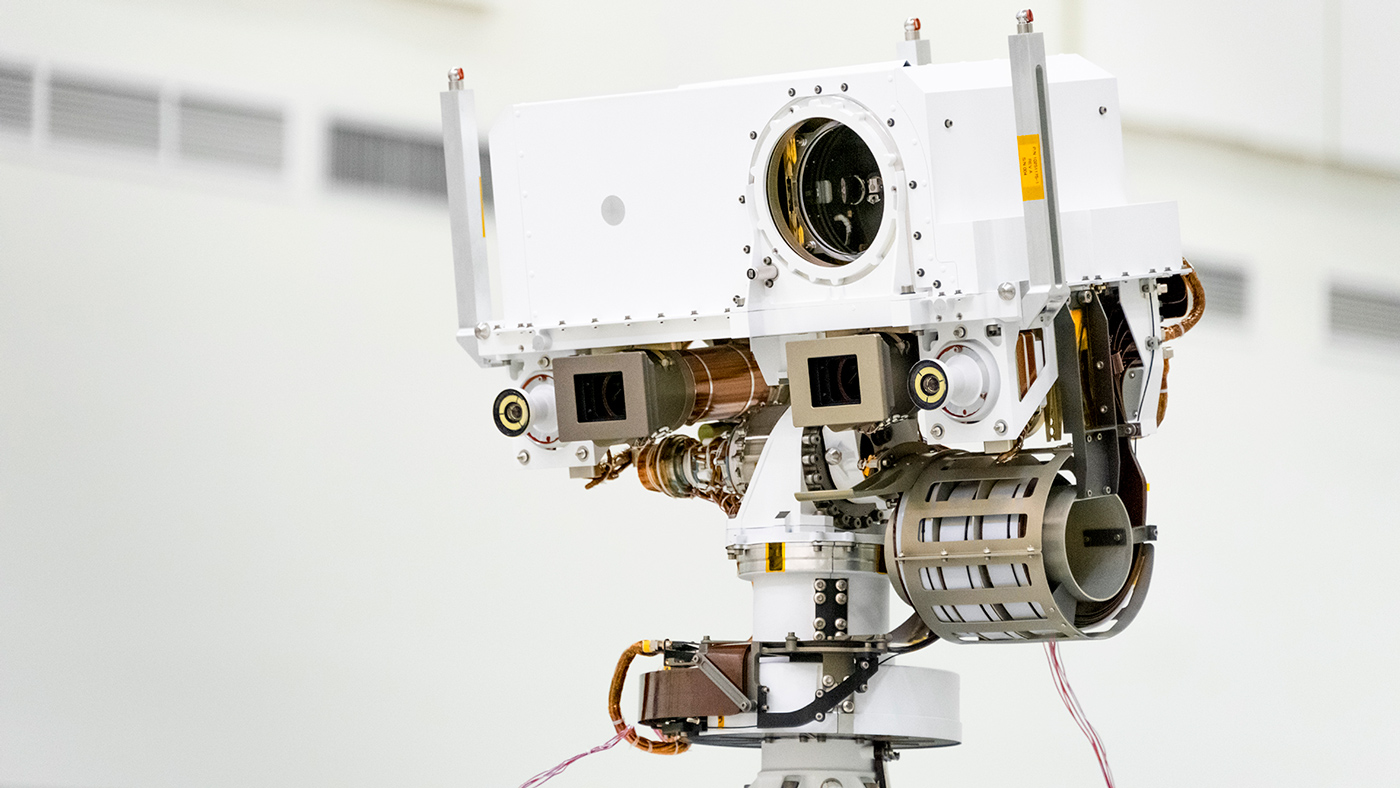
„Otestovali jsme všechny kamery v přední části těla vozítka, ale i ty, které se nachází na jeho stožáru,“ shrnul Maki a dodal: „Geometrické zarovnání všech snímků je velmi důležité pro řízení vozítka, plánování pohybu robotické paže nebo přesné zacílení palubního laseru.“ V nejbližších týdnech dojde k dalšímu kolu zrakových zkoušek – tentokrát čeká velmi podobný postup kamery v zadní části těla a na hlavici umístěné na konci robotické paže.
Kamery Navcam (navigation cameras) bychom našli na stožáru vozítka, tedy na jeho hlavě. Jejich úkolem bude pořizovat panoramatické trojrozměrné snímky, které pomohou naplánovat trasu pohybu roveru, ale i manipulaci s dvoumetrovou robotickou paží, která bude vrtat a odebírat vzorky. Kamery Navcam mohou spolupracovat s kamerami Hazcam (hazard-avoidance cameras), které jsou umístěny ve spodní části těla vozítka. Jejich úkolem je poskytovat doplňující pohledy na terén. Fungují jako strážci, kteří brání tomu, aby se rover ztratil, nebo narazil do nečekané překážky. Jejich snímky bude používat palubní software při autonomní jízdě po Marsu.
Zdroj: https://www.nasa.gov/
Společně s laserem a spektrometry poslouží snímač kamery Supercam k průzkumu marsovských kamenů a prachu. Vědci očekávají, že pomůže s hledáním organických látek, které by teoreticky mohly souviset s dávným životem na Marsu. Na konec jsme si nechali kamery Mastcam-Z, se kterými se asi budeme setkávat nejčastěji. Tyto dvě kamery disponují vysokým rozlišením a společně mají vytvořit multispektrální stereoskopický snímkovací přístroj, který rozšíří schopnosti roveru – ať už z hlediska jízdy nebo odběru jádrových vzorků. Jejich snímky pomohou vědcům podrobně prozkoumat veškeré drobné detaily na kamenech a sedimentech v kterékoliv části zorného pole, což opět pomůže lépe spojit dohromady mozaiku geologické historie Marsu.
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/sites/default/files/thumbnails/image/pia23314-16.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/pia23313-16.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/pia23315-16.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/pia23316-16.jpg



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Zároveň začali vkládat jaderný palivový článek. Je to stejný typ jako využívá Curiosity.
Ano, o tom jsme už také psali. Ale díky za připomenutí. 😉
To mi uniklo. Jinak více technicky zaměřený článek je k dispozici zde http://www.osel.cz/10670-nasa-zahajila-plneni-roveru-mars-2020-jadernym-palivem.html
Dufam, ze nebudem za hnidopicha, alebo puntickara 😀
Trosku to poopravim. Zacalo plnenie radioizotopoveho generatoru nie jeho vkladanie (instalacia) do rovru 2020. V clanku, ktoreho link vlozil pan Majer je v popise obrazku mala nepresnost. Nejednalo sa o instalaciu, ale o „suchy test“ generatoru pre Curiosity, kedy testovali „ci im sedia diery na skrutky“.
Generator naplneny plutoniom sa vklada z bezpecnostnchy dovodov az do skompletizovanej rakety, na ktorej je pripevneny kryt s nakladom.
https://mars.nasa.gov/msl/multimedia/images/?ImageID=3720
Mají tyto kamery kvalitnější snímání než ty na Curiosity?
Ano, prošly vylepšením. Největší změna je u Mastcam-Z, které dostaly možnost zoomování.
Nevím jak je to třeba s rozlišením, ale už to, že umí snímat ve 3D, je docela pokrok
Snímat ve 3D umí i Curiosity. Rover 2020 má mít především výrazně vylepšený systém rozpoznávání obrazu a navigace. Přece jen za tu dobu software v této oblasti výrazně pokročil. Pohyb roveru by měl být pro operátory méně náročný a ti se pak místo hledání cesty mezi šutry budou moci věnovat užitečnějším věcem.
Moc tomuto projektu fandím, takže díky za další článek.
Víme jaké jsou náklady na výrobu pouze roveru? Existuje nějaký finanční rozbor této mise – mám na mysli položkově.
Aspoň bychom měli představu kolik procent představují jednotlivé části.
To se asi rozdělit nedá. Ty položky jsou do sebe asi dost propojené a těžko by se od sebe oddělovaly.
Asi to bylo myšleno jako stavba roveru, vynesení, provoz X let, vyhodnocení nasbíraných dat… To už by mělo jít rozebrat
Bohužel jsem takové údaje nikde neviděl rozpoložkované.