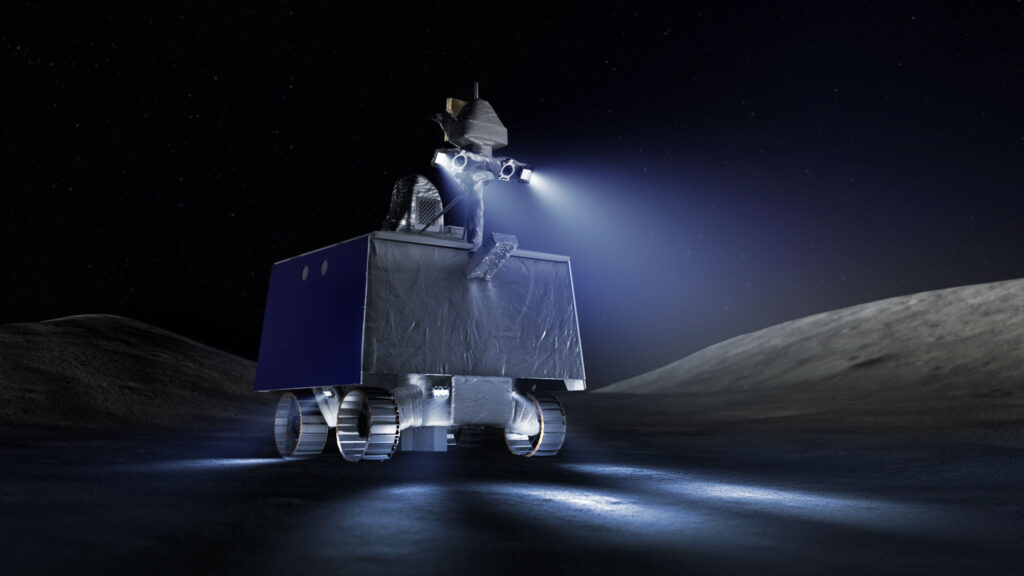
Americké lunární vozítko VIPER (Volatiles Investigating Polar Exploration Rover) nedávno úspěšně dokončilo další kolo zevrubných testů. Při nich se ověřovalo, zda (případně jak) si první americký robotický lunární rover poradí se sjezdem z landeru Griffin od firmy Astrobotic na lunární povrch. Fáze samotného sjezdu trvající několik hodin, patří mezi nejkritičtější a nejsložitější částí celé stodenní mise roveru VIPER. I tento složitý sjezd ale může být ještě zkomplikován, pokud budou sjezdové rampy vinou nerovného terénu sklopeny do prudkého úhlu, případně pokud se nakloní.
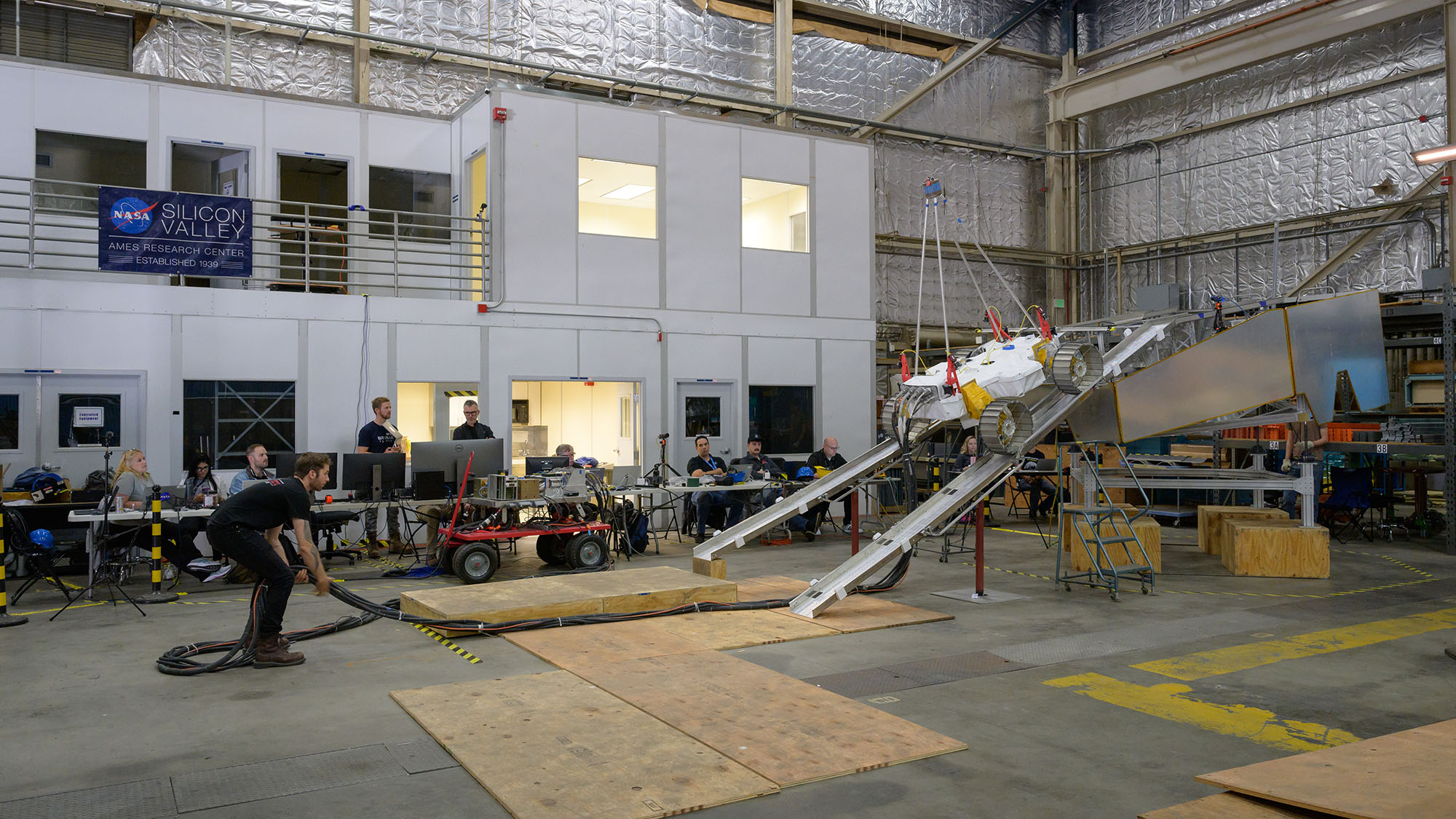
Nedávné testy provedené na Ames Research Center v kalifornském Silicon Valley využily neletové prototypy roveru VIPER i landeru Griffin. Jejich cílem bylo dostat systémy VIPERu na hranici jejich možností a ověřit, že si rover povede podle očekávání. Při sjezdu makety roveru označované jako MGRU3 (Moon Gravitation Representative Unit 3) z rampy v různých konfiguracích se inženýři mohli na vlastní oči přesvědčit, jak rover provede nominální i nezvyklé scénáře.
Na rozdíl od velkých souprav, které na Zemi převáží auta z místa na místo, je geometrie sjezdových ramp landeru navržena tak, aby se přizpůsobila tomu, jaký bude povrch v okamžiku, kdy modul dorazí na své místo přistání na vrcholu ploché měsíční hory Mons Mouton poblíž jižního pólu Měsíce. V závislosti na terénu v okolí může být úhel sjezdových ramp i velmi prudký, což představuje značné riziko, jelikož rover může ztratit trakci a sklouznout se. Jedna z ramp může mít jiný sklon než druhá, což od řídícího týmu vyžaduje aktivní kompenzace těchto složitých podmínek.
Zdroj: https://www.nasa.gov/
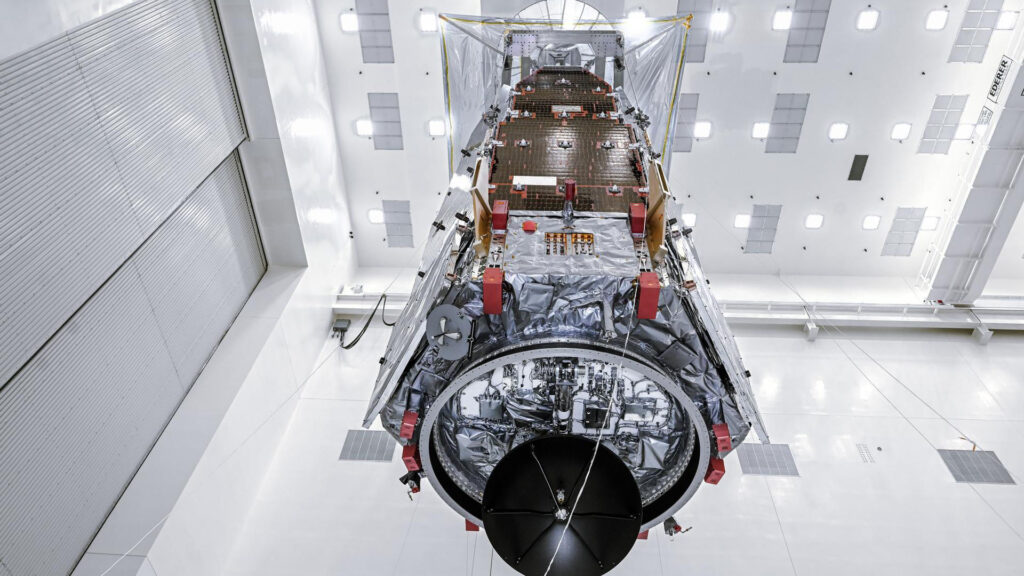
„V průběhu zkoušek jsme otestovali všechny hraniční scénáře sjezdu roveru VIPER na Měsíc,“ popisuje Jasper Wolfe, který stál v čele týmu zodpovědného za zkoušky sjezdu na Ames Research Center a dodává: „Součástí zkoušek byly i nejhorší možné (a poměrně nepravděpodobné) scénáře využívající děsivě prudké rampy, případně scénáře svádějící k převalení kvůli velmi nerovnoměrnému sklonu sjezdových ramp, ale testovali jsme také kombinaci obou scénářů.“ Jak je vidět na fotce, kterou NASA zveřejnila, testy se zaměřovaly na fyzické rozhraní mezi roverem a landerem. Součástí ověřovacích testů byly kontroly softwaru – především toho, který se stará o sjezd roveru, ale i toho, který řeší změny fyzických součástí vozítka i rampy přistávacího modulu. Tým pečlivě kontroloval, zda má MGRU3 dostatečný volný prostor a zda správně využívá ramp při sjíždění shora dolů.
„S pomocí MGRU3 jsme prověřili všechny testované scénáře, abychom se ujistili, že to VIPER na Měsíci zvládne,“ uvedl Wolfe. Dokončení testů znamená zvýšení pravděpodobnosti, že VIPER bude schopen úspěšně opustit lander dokonce i když Griffin přistane na ne úplně ideálním místě, což je pro další přípravu letu velmi důležité. „S VIPERem dosáhneme mnoha prvenství,“ doplňuje Wolfe a uzavírá: „Je opravdu úžasné dosáhnout tohoto milníku.“
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/…/image/viper_cdr_hero_08_1920x1080_v06.png
https://www.nasa.gov/sites/default/files/thumbnails/image/acd23-0066-049.jpg




{kind=link}
{kind=link}