
Trojice malých vozítek má prozkoumávat Měsíc a přitom vzájemně spolupracovat. Jejich start se nyní zase o kousek přiblížil. Inženýři z kalifornské Jet Propulsion Laboratory nedávno dokončili sestavování těchto samohybných robotů a poté je vystavili drsným zkouškám, které měly prokázat, že rovery přečkají nelehký start na raketě do kosmického prostoru, přelet k Měsíci i práci na jeho povrchu. V rámci technologické demonstrační mise CADRE (Cooperative Autonomous Distributed Robotic Exploration) budou na Měsíc vyslána vozítka o velikosti příručního kufříku, které budou čerpat energii z fotovoltaických článků. Rovery i další hardware budou připojeny na lander, který zamíří do oblasti Reiner Gamma. Po dobu přibližně 14 pozemských dní (jednoho lunárního dne) budou provádět experimenty zaměřené na autonomní průzkum, mapování a využití povrch penetrujícího radaru, díky kterému vědci nahlédnou pod povrch Měsíce.

Zdroj: https://d2pn8kiwq2w21t.cloudfront.net/
Cílem je ukázat, že skupina robotických průzkumníků může spolupracovat na provádění úkolů a sběru dat jako tým, aniž by bylo potřeba připravovat pro ně v řídícím středisku na Zemi doslovné pokyny.
Pokud projekt uspěje, mohly by budoucí mise obsahovat týmy robotů, které od místa přistání zamíří různými směry a budou provádět souběžná distribuovaná vědecká pozorování a potenciálně i s pomocí astronautů. Inženýři věnovali zkouškám roverů mnoho hodin, aby vychytali všechny mouchy, dokončili hardware, provedli jeho testování a připravili jej na integraci s landerem.
„Pracovali jsme ostošest, abychom tento technologický demonstrátor připravili na jeho lunární dobrodružství,“ říká Subha Comandur, manažerka projektu CADRE z JPL a dodala: „Byly to měsíce téměř nepřetržitého testování a někdy také re-testování, ale tvrdá práce týmu se vyplácí. Teď víme, že jsou tyto rovery připraveny ukázat, co tým kosmických robotů může společně dokázat.“ Zatímco seznam zkoušek je rozsáhlý, jeho nejdrsnější body obnášely simulaci extrémních podmínek, aby se ověřilo, že rovery dokáží přečkat nástrahy, které na ně čekají. Šlo třeba o jejich uzavření do termálně-vakuové komory, která simuluje absenci vzduchu v kosmu i extrémy vysokých a nízkých teplot. Hardware byl také připojen ke speciálním vibračním stolům, které s ním silně třásly, aby se prokázalo, že vozítka zvládnou cestu pozemskou atmosférou.

Zdroj: https://d2pn8kiwq2w21t.cloudfront.net/
„Tomuto podrobujeme naše rovery: „třesení“, aby se simuloval samotný start rakety, a „pečení“, aby se simulovaly extrémní teploty ve vesmíru. Je to velmi nervy drásající, když to vidíte osobně,“ přiznává Guy Zohar z JPL, manažer letových systémů této mise a dodal: „V našem projektu využíváme řadu pečlivě vybraných komerčních součástek. Očekáváme, že budou fungovat, ale jsme vždy trochu znepokojeni, když nás čekají testy. Naštěstí všechny zkoušky nakonec dopadly dobře.“ Inženýři provedli environmentální testy na třech prvcích hardwaru, které budou připojeny k landeru. Jedná se o základovou stanici, se kterou budou vozítka komunikovat, dále o kameru, která má sledovat činnost roverů a vypouštěcí systém, který na lankách spustí vozítka k povrchu s využitím motorizovaného navijáku.
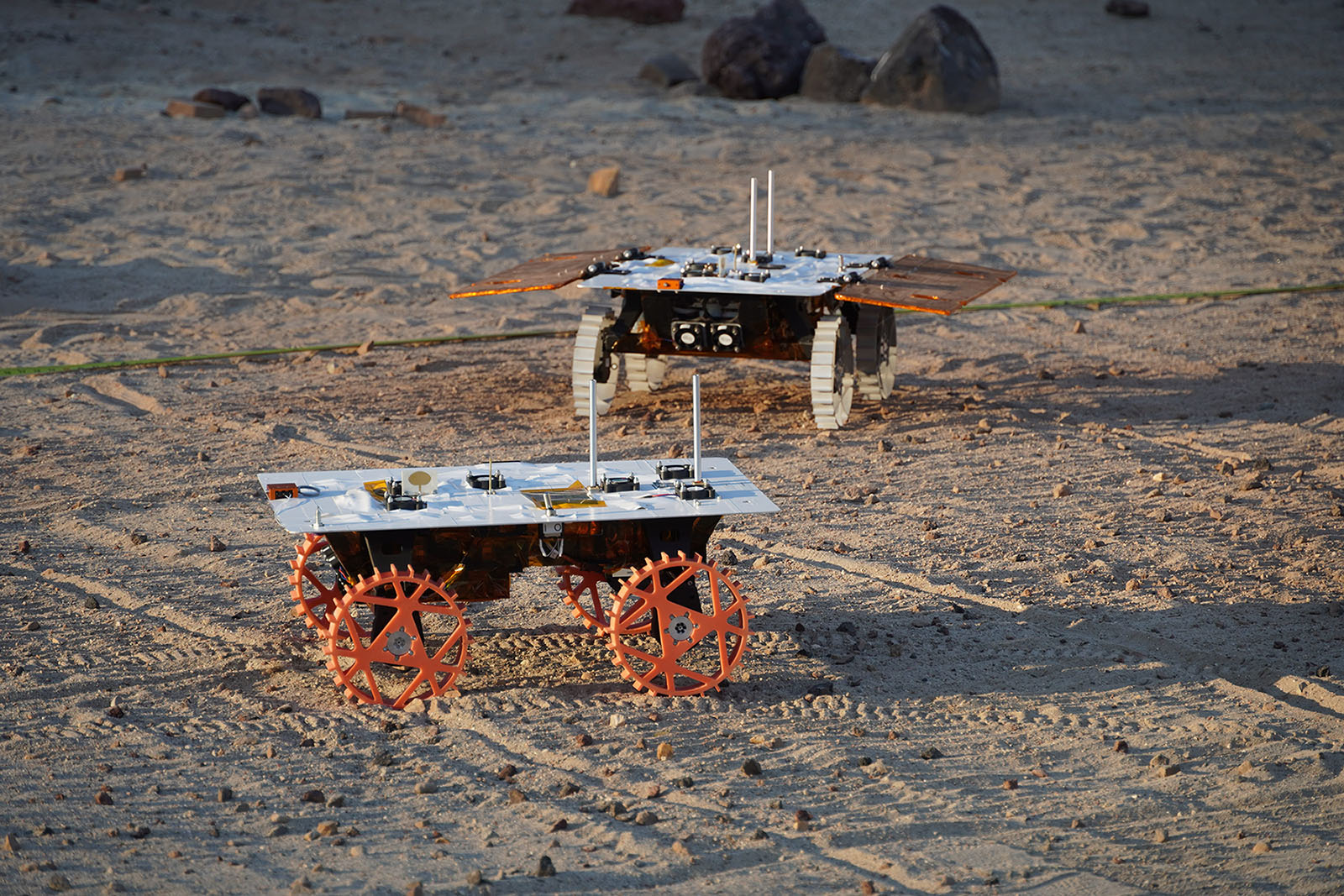
Mezitím inženýři pracující na softwaru autonomní kooperace strávili několik dní na tzv. Mars Yardu, což je místo v JPL s kameny a pískem, kde byly testovány plnorozměrové testovací verze roverů označované jako vývojové modely. Jejich palubní počítače byly vybaveny letovou verzí softwaru s autonomními funkcemi a tak mohly rovery ukázat, že jsou schopny splnit klíčové úkoly projektu. Když vozítka narazila na nečekanou překážku, upravila své skupinové plány tím, že si mezi sebou nasdílela aktualizované mapy a přeplánovala koordinační trasy. A když jednomu roveru začala docházet energie v akumulátoru, dal si zbytek týmu pauzu, aby později mohli všichni společně pokračovat.
Zdroj: https://d2pn8kiwq2w21t.cloudfront.net/
V rámci zkoušek proběhlo i několik nočních jízd při osvětlení výkonnými lampami, takže se rovery seznámily s extrémními kontrasty stínů a osvětlených ploch, což připomíná situaci, které budou čelit za lunárního dne. Po těchto zkouškách experti provedli podobné zkoušky jízdy se skutečnými letovými kusy, které se vydají k Měsíci. Tyto jízdy však probíhaly v čisté místnosti na JPL. Zdejší hladká podlaha roverům trochu klouzala a rovery se dostaly mimo formaci. Málo platné, na měsíci na ně čekají jiné podmínky. I tento test však byl užitečný, protože se ukázalo, že v takovém nečekaném případě vozítka zastaví, upraví svůj směr a poté pokračují po plánované dráze.
„Schopnost poradit si s nečekanými překážkami je v autonomii velmi důležitá. Klíčové je, že roboti reagují na věci, které se vymykají plánu, a pak znovu plánují a jsou stále úspěšní,“ říká Jean-Pierre de la Croix z JPL, hlavní řešitel mise CADRE a vedoucí programu autonomie a dodává: „Míříme do jedinečného prostředí Měsíce a tam nás určitě potkají nějaké nečekané překážky. Udělali jsme to nejlepší, abychom je na to připravili při společných testech hardwaru a softwaru v různých situacích.“ Dalším krokem bude přesun vozítek do sídla firmy Intuitive Machines, kde proběhne jejich instalace na lander Nova-C. Ten poté odstartuje na raketě Falcon 9 z Kennedyho střediska na Floridě.
Přeloženo z:
https://www.jpl.nasa.gov/
Zdroje obrázků:
https://d2pn8kiwq2w21t.cloudfront.net/…CADRE_B18_autonomous_drive.JPG
https://d2pn8kiwq2w21t.cloudfront.net/…CADRE-rovers-complete-team.jpg
https://d2pn8kiwq2w21t.cloudfront.net/…CADRE_EMC_testing.JPG
https://d2pn8kiwq2w21t.cloudfront.net/…CADRE_Mars_Yard_tests.JPG





{kind=link}
{kind=link}
{kind=link}
{kind=link}
Dodal bych, že tahle trojice roverů poletí až na IM-3, takže ještě jedna Nova-C bude mít mezi tím možnost vychytat mouchy, aby bylo asi v prvním čtvrtletí 2025 dosaženo skutečně vzpřímeného přistání, které už bude nutné.
Díky za info. 😉