Ještě do nedávná se měkké přistání na povrchu Měsíce povedlo pouze čtyřem zemím – Rusku (Sovětský svaz), Spojeným státům, Číně a Indii. V pátek do tohoto prestižního klubu přibylo Japonsko a to díky sondě SLIM. Pokud tedy můžeme výsledek považovat za měkké přistání, protože se to nepovedlo tak, jak bylo v plánu. Landru se přezdívá měsíční sniper kvůli pokročilému systému navigace, který měl zaručit, že bude schopen přistát do vybrané oblasti s přesností 100 m. Může se to zdát hodně, ale oproti minulým misím by to bylo velké zlepšení, protože přistávací oblasti byly vždy kilometry velké. Nejasný přídomek je použit záměrně, protože stále nevíme zda se přesné dosednutí skutečně povedlo a otázek je víc. Víme s jistotou, že SLIM se na povrch Měsíce dostal, ale ne tak, jak by si asi mnozí přáli. Opět nám to připomíná, že přistát na Luně je velice náročný úkol a jak by náš šéfredaktor podotkl: „Jde skutečně o vyšší dívčí“.
Opakované odkládání
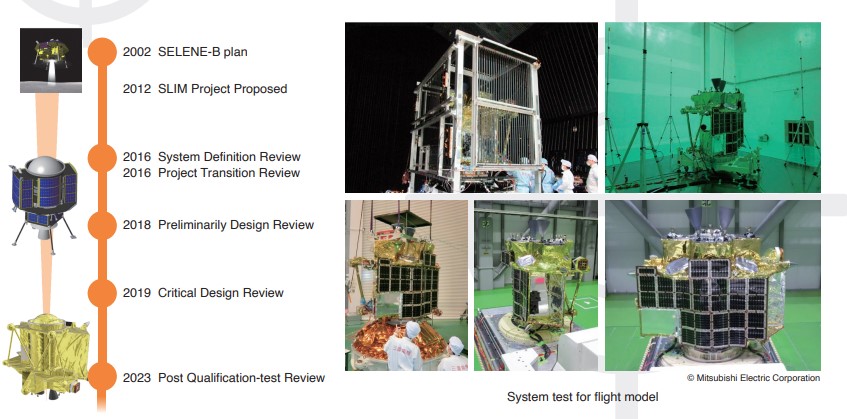
Japonská kosmická agentura JAXA je známá například tím, že věci dělá trošku jinak, než je běžné a často se nebojí do architektury svých sond implementovat zajímavé a ještě neodzkoušené technologie. Stačí si vzpomenout na dvojici sond Hajabusa. A také SLIM není úplně běžná sonda. Historie s ní spojená je poměrně dlouhá. První návrh, který později vešel ve známost jako Small Lunar Landing Experiment Satellite (SLIM), se objevil už v roce 2002. Tehdy ještě pod názvem SELENE-B. Ano, skutečně realizace některých misí může trvat takto dlouho. V červnu 2014 prošla sonda SLIM důležitým semifinálovým výběrem spolu s demonstrační misí DESTINY+ a v únoru 2015 byl nakonec vybrán právě lander SLIM. Pod záštitou JAXA tak tedy začal vznikat tento zajímavý projekt. O stavbu se postarala společnost Mitsubishi Electric (MELCO). Architektura sondy se měnila také několikrát a původní plán rychlé mise realizované do 3 let se nepovedlo ani zdaleka naplnit.

A také start byl opakovaně odkládán kvůli vnějším faktorům. Původně byl záměr odstartovat na raketě Epsilon v roce 2018. Krátce po stanovení termínu však bylo rozhodnuto, že se vynesení posouvá až na rok 2019. Tou dobou JAXA směřovala finance hlavně na projekt vesmírné observatoře XRISM, která měla prioritu. Japonsko totiž v roce 2016 přišlo o teleskop Hitomi (ASTRO-H) a právě XRISM je jeho nástupcem. Úspora peněz způsobila, že se start sondy SLIM přesunul na raketu H-IIA a sveze se právě společně s observatoří XRISM v roce 2021. Jenže potíže během vývoje teleskopu způsobily další dva odklady a to znamenalo i další čekání pro SLIM. Ten se dočkal až v září roku 2023 a důvodem bylo i selhání rakety H-3 během inauguračního letu. Konečné datum bylo také třikrát posunuto kvůli počasí v místě startu. Raketa H-IIA však nakonec oba automaty úspěšně vynesla a dlouho očekávaná výprava v japonském podání na Měsíc mohla začít. Cesta to však nebyla jednoduchá. JAXA zvolila delší přeletovou fázi kvůli co největší úspoře paliva a tak k usazení na oběžné dráze okolo Měsíce došlo až v první svátek vánoční 25. prosince 2023.
Přínosy mise
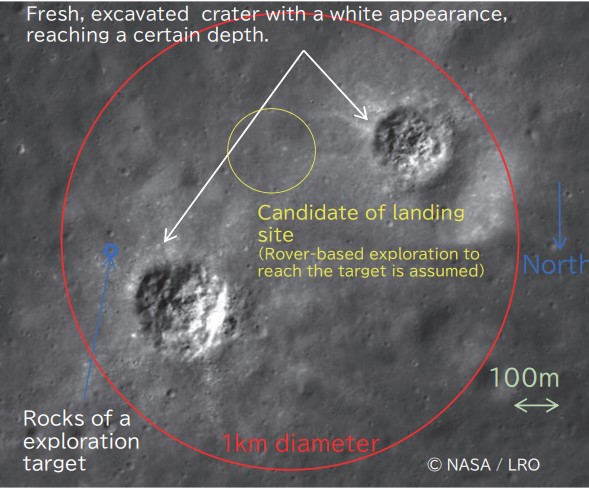
Stále se zvyšující rozlišení kamer na vesmírných sondách a v tomto případě myšleny hlavně ty měsíční, odhalují nevídané podrobnosti na povrchu a nejen to. Stále častěji jsme schopni odhalit zajímavé útvary a horniny, které doslova lákají k průzkumu. Našim omezením je však to, že doposud nejsme schopni přesného a bezpečného přistání na daném místě. Navíc průzkum vybraného místa nemusí vyžadovat jen přesné dosednutí, ale i výzvu v podobě nerovného a těžko přístupného terénu. Což představuje daleko větší riziko, než přistání na relativně rovinatém povrchu. To má význam nejen pro budoucí mise na Měsíc, ale i na ostatní místa Sluneční soustavy. Kam patří planety, jejich měsíce a samozřejmě asteroidy nebo komety. Například na obrázku vidíme fiktivní misi vyžadující přesné přistání. Je vidět místo zajmu, oblast přistání a nutný přesun vozítka terénem k cíli, což není bez rizika a navíc zdlouhavý přesun snižuje životnost daného zařízení. Něčeho takového, ale zatím nejsme schopni. Naše automaty přistávají s přesností nikoliv desítek, či stovek metrů, ale jednotek, či spíše desítek kilometrů! Pro budoucí mise spojené s budováním měsíční infrastruktury, je pak přesné přistání tzv. pinpoint landig doslova nezbytností. Stačí si představit zásobovací misi, která přistane kilometry od základny. Obtížný přesun k základně může být náročnou výzvou riskující životy celé posádky.
V Japonsku se přesnou navigací a přistáním zabývají již delší dobu. Například obě sondy Hajabusa byly navrženy na velmi přesný dotyk s povrchem, kvůli odběru vzorků z planetek. To si vyžádalo autonomní optickou navigaci a úspěch obou misí byl krokem k dalšímu zlepšení. JAXA ve spolupráci s institutem Space and Astronautical Science (ISAS) navrhla a postavila navigační systém schopný přesného přistání. A to byl i hlavní úkol mise SLIM. Ověřit přesné přistání s přesností na 100 metrů. Zde jsou dva hlavní přínosy mise v bodech.
Cíl A: Demonstrace vysoce přesné technologie přistání na Měsíci
◦ Přesnost cíleného přistání s přesností 100 m. Ve srovnání s několika kilometry až desítkami kilometrů u běžných lunárních přistání přistávacích modulů.
◦ Klíčová technologie zahrnuje optickou navigaci a systém autonomního navádění a řízení.
Cíl B: Realizace lehkého systému lunárních a planetárních sond, který umožní častější průzkumné mise na Měsíc a planety
◦ Malý, lehký a vysoce výkonný chemický pohonný systém
◦ Snížení hmotnosti základních prvků konstrukce většiny kosmických lodí, jako jsou počítače a napájecí systémy.
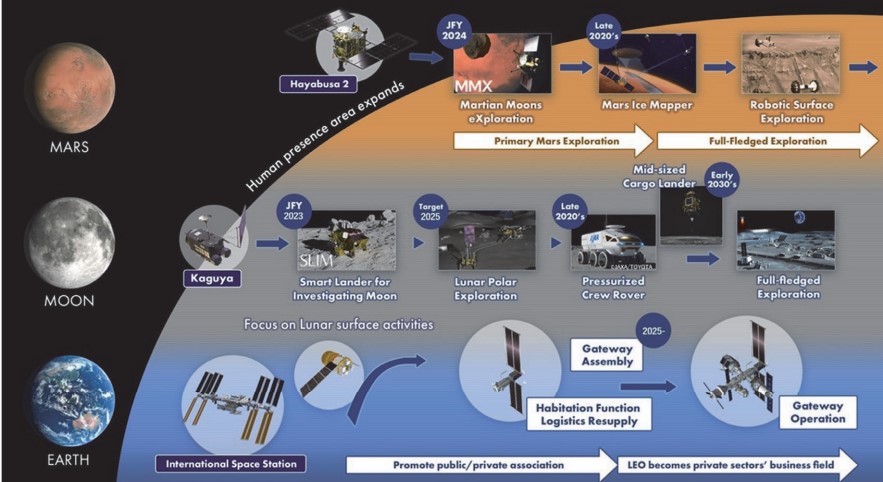
V první řadě je tedy třeba si uvědomit, že šlo o technologický demonstrátor a teprve výsledky z této výpravy budou implementovány do plnohodnotných misí, jako je chystaná Martian Moons eXploration (MMX), která se pokusí o odběr vzorků z Phobosu, většího ze dvou měsíců Marsu. A nebo polární mise LUPEX (Lunar Polar Exploration Mission), na které JAXA spolupracuje s indickou agenturou ISRO a také do budoucích polárních misí na Měsíc, ale těžit z výsledků budou samozřejmě i další mezinárodní projekty spojené s Měsícem.
Měsíční sniper
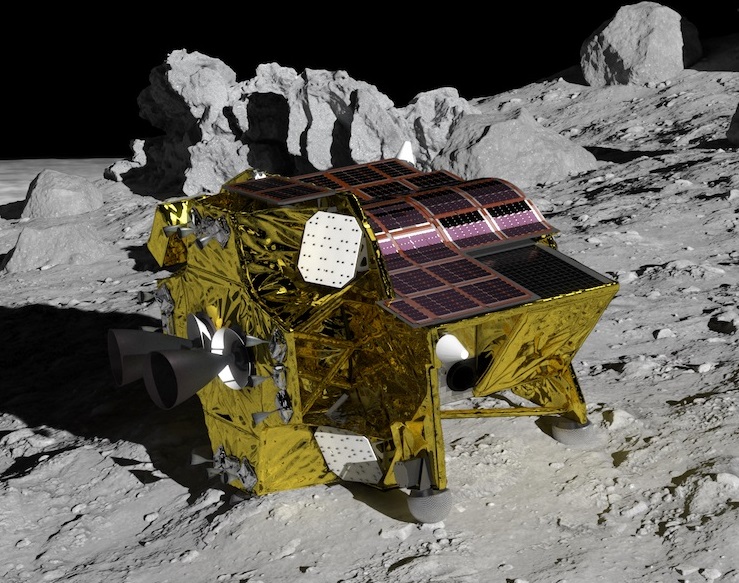
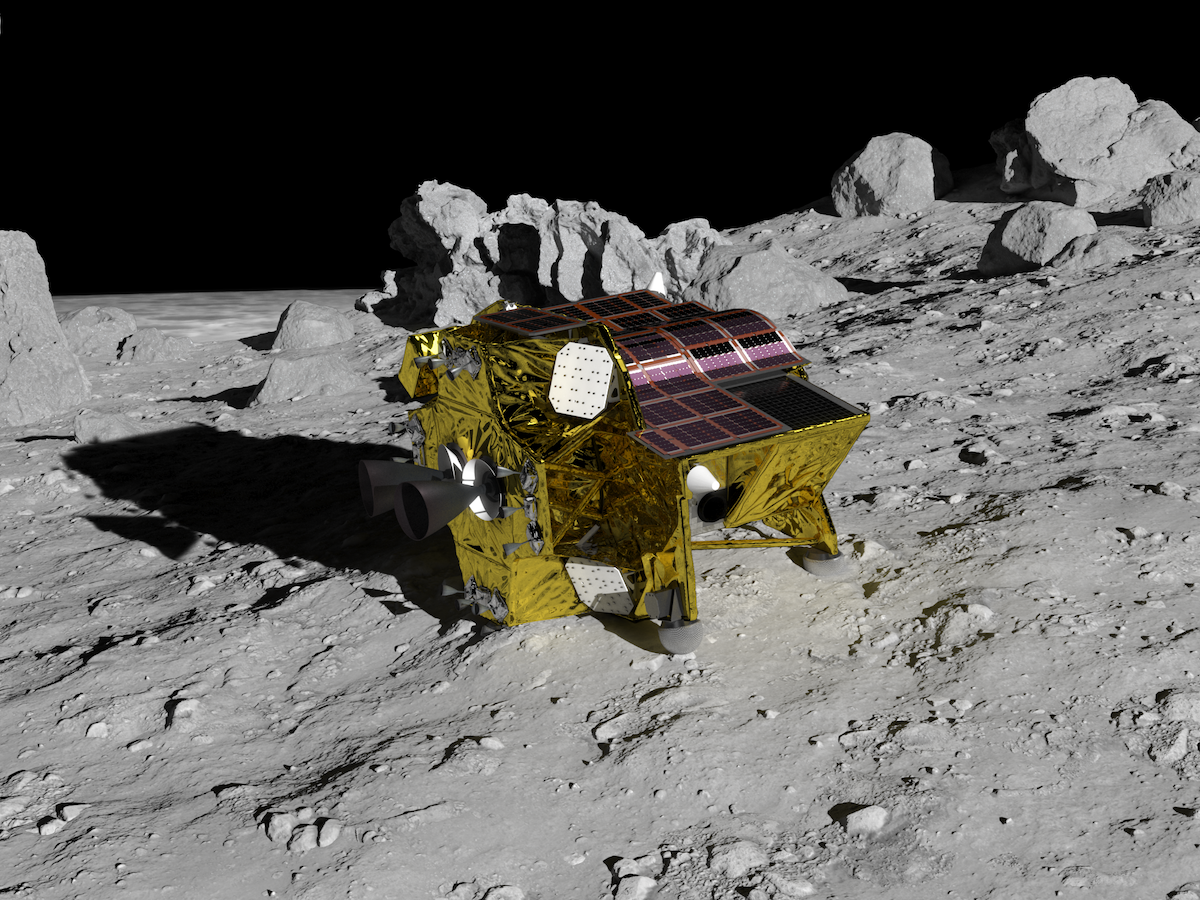
S dvou hlavních cílů vyplývá, že samotná sonda, nebo chcete-li lander, byl navržen jinak, než jsme u podobných misí zvyklí. Mnohé napoví již samotné rozměry a váha, tak tady jsou: 2,4 m x 1,7 m x 2, 7 m. Hmotnost prázdné sondy byla jen 200 kg a startovní hmotnost činila 700 až 730 kg. Vzhledem se SLIM podobá spíše družici než landeru. Základem celé konstrukce je nádrž na palivo a okysličovadlo, která přispěla k celkovému snížení hmotnosti. Na těle dále najdeme dvojici hlavních motorů o tahu 500 N a sérii 12 manévrovacích trysek v konfiguraci po třech do kříže o tahu 20 N. Přistávací radar, navigační kamery, anténu, přistávací vzpěry s tlumiči nárazu a tenké solární panely na horní části.

SLIM je dále vybaven spektrální kamerou MCB, která měla začít fungovat po přistání a koutovým odražečem (LRA) od NASA. Spolu se sondou se na Měsíc svezla ještě dvojce zajímavých až kuriózních vozítek s názvem LEV-1 a LEV-2 (Lunar Excursion Vehicle). Sofistikovanější jednička má solární články a byla schopna přímé komunikace se Zemí. Její pohyb připomíná skok žáby a to doslova. Menší LEV-2 je v podstatě rozkládací míček o hmotnosti 250 g a průměru (ve složeném stavu) 8 cm. Tento zajímavý robot byl inspirován dětskými hračkami a má ho na svědomí Tomy Company, Sony Group Corporation a Doshisha University.

Uvnitř sondy se pak nacházel modul s lithiovými bateriemi LICM. Jednotka IPCU, která se starala o více věcí najednou a nebylo třeba více komponentů, jak je běžné. Na starost měla řízení dobíjení a vybíjení, zdroj elektrické energie, řízení ohřevu a regulaci sluneční energie. Dále ovládání ventilů pro orientační motory a to vše v kompaktním provedení. Samozřejmostí je palubní počítač (SMU) a transpondér pro pásmo S (STRX) a další senzory. Tolik v krátkosti k samotnému popisu landru SLIM. Pojďme se teď ale zaměřit na to, co jistě zajímá řadu z vás – samotný průběh přistání a jeho výsledek, který je ale bohužel stále ještě nejistý.
Průběh přistání
SLIM před svým sestupem upravil svou kruhovou oběžnou dráhu a v době zahájení klesání měla parametry 15 x 600 km. Poté dostal hlavní slovo systém navigace a řízení klesání. SLIM mířil do vybrané oblasti kráteru Shioli v Moři nektarů. Modul ale nezačal sestupovat z nejnižšího bodu oběžné dráhy. Před tím ještě malinko navýšil dráhu na 25 km nad povrch, aby se mohl vyrovnat. Sestupový systém bych přirovnal k technologii rozpoznávání obličeje. SLIM pořizoval snímky a na nich algoritmy hledaly povrchové útvary, jako jsou balvany, větší kameny, krátery a jejich pozici porovnával s mapou, kterou měl uloženou v paměti. Mapa vznikla ze snímků ve velkém rozlišení ze sond Kaguja a LRO. Z toho dokázal počítač velice dobře a přesně odhadnout kde v prostoru se lander nachází a dokázal tak řídit manévry, respektive řízení sestupu na konkrétní místo. A to vše prakticky v reálném čase, což je právě díky novým algoritmům. Jednoduše řečeno, nikdo nic podobného před misí SLIM zatím nezkusil. Navigační systém pak ještě doplnily radar a výškoměr.
JAXA v přenosu nabídla opravdu detailní telemetrická data, která se hodila zejména v poslední části sestupu. Přibližně 15 km nad povrchem lander vypl všechny své motory a započalo snímkování terénu a vyhodnocování dat. Ve výšce okolo 11-10 km došlo k opětovnému zážehu kvůli snížení rychlosti. Od výšky 7 km již lander klesal zcela ve vertikální poloze. Přibližně 500 m nad povrchem SLIM přestal na chvilku klesat a po určitou dobu se vznášel a analyzoval terén v přistávací oblasti.
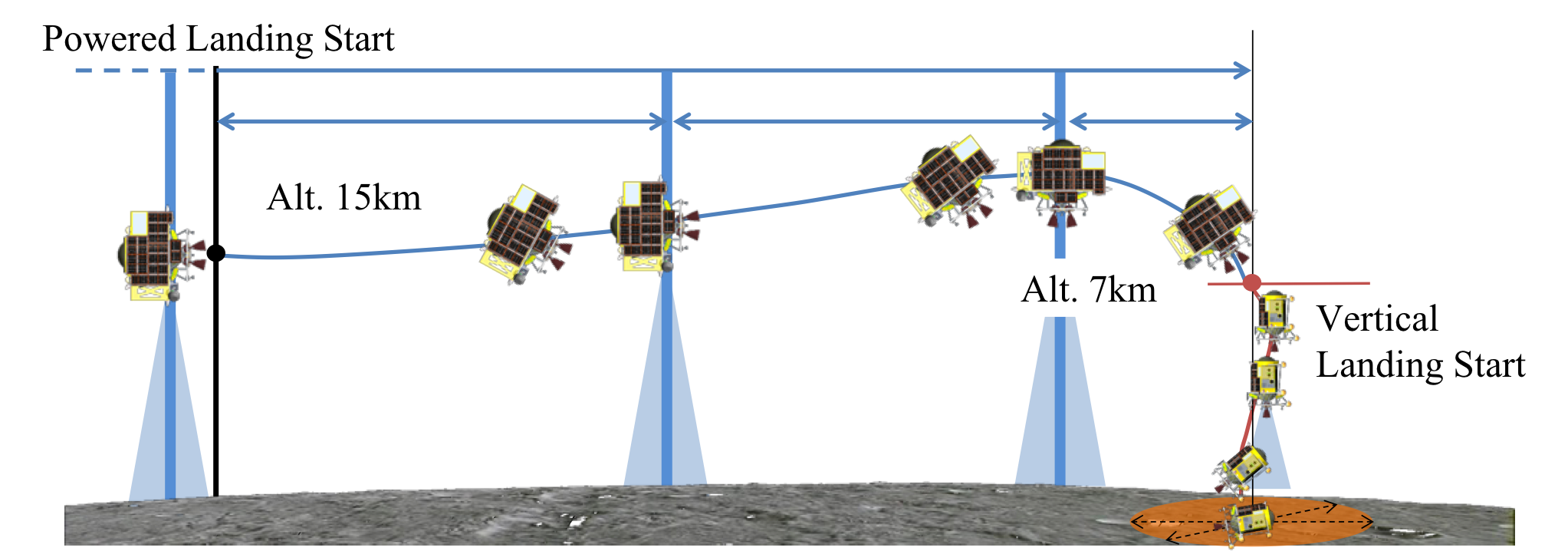
To stejné pak lander opakoval ve výšce 50 m nad povrchem. Poslední dva metry před dosednutím se od sondy oddělila dvojice robotů LEV a SLIM měl krátce na to provést dvoufázové přistání. Vzhledem k tomu, že se místo přistání nachází v blízkosti kráteru, má vybraná oblast sklon zhruba 15 stupňů. Tým vybral takto strmý terén záměrně, aby odzkoušel složitější přistání než je běžné. V plánu bylo před dosednutím vypnout motory, překlopit sondu a dotknout se povrchu nejdříve jen spodní částí s tlumiči nárazu a pak dosednout i na přední plochy. Opět záměrně píšu měla, protože právě v této fázi se zřejmě něco pokazilo.
JAXA na tiskové konferenci sice sdělila, že se povedlo na povrchu Měsíce přistát, ale solární panely nebyly schopné vyrábět solární energii a zároveň bylo vyloučeno i jejich poškození. Tudíž se předpokládá, že lander sice dosedl, ale s největší pravděpodobností jinak, jak naznačují i poslední telemetrická data. Další možností je například překlopení na bok nebo neplánované dosednutí do stínu a nebo sklouznutí po svahu. Jsou to ovšem jen mé spekulace.
Zde je simulace vytvořená na základě telemetrických dat a ukazuje, co se velmi pravděpodobně stalo s landrem SLIM. Mohl se dotknout povrchu dříve a to způsobilo nemožnost posledního manévru. Autor: @itoht2 #SLIM pic.twitter.com/xkrRCmnLDY
— Karlos (@karlosmeybe) January 20, 2024
Týmu se však podařilo s landrem navázat spojení a komunikovat se Zemí a proto výsledek považují za úspěch s tím, že minimálně stanovené cíle mise byly už splněny. Před misí byly stanoveny body, které jsou v následující tabulce:
| Úroveň úspěchu přistání | Kritéria |
|---|---|
| Minimální úspěch | Přistání na Měsíci modulu SLIM vcelku. |
| Plný úspěch | Musí být dosaženo vysoké přesnosti přistání s přesností 100 m. (Data se analyzují) |
| Extra úspěch | Po odeslání technických údajů o vysoce přesném přistání budou aktivity na měsíčním povrchu pokračovat po určitou dobu až do západu slunce a na měsíčním povrchu bude proveden průzkum. |
Přesný stav však zůstává nejasný a nevíme ani s jakou přesností do oblasti SLIM dosedl. S jistotou víme jen, že solární panely nejsou orientovány směrem ke Slunci, a proto nevytvářejí dostatek energie. Přistávací modul tedy fungoval na vnitřní baterii, která byla toho dne zcela vybitá. Operátoři mise doufají, že se jim modul podaří probudit po několika dnech, kdy by sluneční světlo mělo dopadat na solární panely, ale šance nejsou velké. Některé otázky tedy zůstávají, ale tým přislíbil, že po vyhodnocení základních dat v průběhu příštího týdne zveřejní informace a první výsledky, kterých se podařilo dosáhnout. Dobrou zprávou je, že robot LEV-1 komunikoval z povrchu a je možné, že se dočkáme i nějakých fotografií. Vše ostatní by v tuto chvíli byla jen pouhá spekulace. Je tedy třeba ještě počkat na další informace a pokud se objeví, tak o nich budeme určitě naše čtenáře informovat. Ať tak či onak. Mise SLIM nás přibližuje do éry kosmických přistání tam, kde chceme, oproti přistáním kde bychom chtěli.
EDIT: 22. ledna 14:00
Podařilo se stáhnout většinu dat, včetně fotografií. Při úrovni nabití baterie 12 % byla baterie odpojena (jak bylo plánováno), aby se předešlo možnému restartu pro operaci obnovení kvůli nadměrnému vybití. SLIM se proto vypnul. Podle telemetrických údajů jsou solární články SLIM otočeny na západ. Takže pokud sluneční světlo začne svítit na měsíční povrch od západu, existuje možnost výroby energie a tým se připravujeme na zotavení. SLIM může fungovat pouze s napájením ze solárních článků. Až do vypnutí napájení po přistání se úspěšně přenášela technická a obrazová data získaná při sestupu při přistání a na měsíčním povrchu. V současné době tým provádí podrobnou analýzu a získáno bylo poměrně dost dat. Na konec týdne se připravují informace o konečném stavu a výsledku přistání. LEV-1 už též nevysílá, ale podařilo se spojení se Zemí a na další informace se čeká. Jak dopadl LEV-2 není známo. Tyto informace zapracuji také do článku jako aktualizaci.
Zdroje informací:
https://global.jaxa.jp.pdf
https://global.jaxa.jp/activity/pr/jaxas/no088/03.html
https://en.wikipedia.org/wiki/Smart_Lander_for_Investigating_Moon
https://global.jaxa.jp/countdown/slim_special_site.html
Zdroje obrázků:
https://s3-ap-northeast-1.amazonaws.com
SLIM-mediakit-EN_2310.pdf Str. 8
SLIM-mediakit-EN_2310.pdf Str. 20
https://jda.jaxa.jp
SLIM-mediakit-EN_2310.pdf Str. 4
https://s3-ap-northeast-1.amazonaws.com
https://jda.jaxa.jp




{kind=link}
{kind=link}
Podarilo sa sonde aspon poslat fotogtafie z pristania? Pristanie bolo asi snimkovane.
Zatím nevíme. Data se vyhodnocují a JAXA slíbila, že další informace poskytne v příštím týdnu.
Pokud jsem to správně vyhodnotil, přistáli v 16:20. DSN kolem 18 hodiny udávala spojení se SLIM a LEV-1. DSN poté kolem 20 hodiny ztratila signál SLIMu, tedy baterie se vybily. Jestli za tři dny nejsou Japonci schopní říct, v jaké poloze přistáli a jaké jsou vyhlídky na oživení mise, taky to něco říká – buď mají problém se zpracováním dat (můžou být vadná), nebo zatím nechtějí nic říct, protože fiasko. Ještě je malá naděje, že čekají na Slunce, jestli sondu oživí, a zatím mlčí (japonské mentalita), tomu ale moc nevěřím.
Měsíc prostě je příliš těžký pro ambiciózní firmy (a státy) s velkými plány a nevyzkoušenými řešeními. Jediný, kdo uspěl, je Čína a Indie dělající jeden malý krok za druhým s neustálým poučením z nezdarů.
Spojení bylo navázáno a baterie zcela vybita. Tým se soustředil na získání co nejvíce dat a doufá, že se po změně úhlu slunečního záření podaří ještě obnovit spojení, ale šance je malá.
Skvělý článek. A tu bakterii považuji za takovou třešničku na dortu.
No vidíte to. Raději si to opravím, aby nedošlo k mýlce. Děkuji.
Sám za sebe považuji samotné přistání za úspěšné. I když trochu podle vzoru Luna 23. Oba LEVy to vyšperkovaly a jsem moc zvědav na detaily komunikace jedničky se Zemí a jestli nám poskytla nějaké info o dvojce, zda se rozložila, rozjela a tak. Jo a fotky SLIMu by byly super. Z oběžné dráhy hádám brzy dorazí, ale od LEVů by mohly být také užitečné.
Ale poslední souvětí článku by možná chtělo upravit.
Na tiskovce padlo, že přenos obrázků neměl prioritu, ale je možné, že v následujících týdnech nějakou fotografii zveřejní, pokud se jí podařilo získat.
To je jasné, když se bojuje o život, jsou priority jinde. Co LEV 1? Teoreticky by mohl fungovat dlouho. Tedy pokud ten jeho panýlek stačí kromě sběru energie i na nějaké to zahřívání elektroniky. Doufám, že JAXA postupně pustí více info i o něm a LEVu 2, protože o dvojce víme snad jen to, že byla úspěšně odhozena. Nevybavuji si, že by bylo oznámeno, že se přes jedničku spojil se Zemí.
Tak shrnu tu poslední dostupné informace. Podařilo se stáhnout většinu dat, včetně fotografií. Při úrovni nabití baterie 12 % byla baterie odpojena (jak bylo plánováno), aby se předešlo možnému restartu pro operaci obnovení kvůli nadměrnému vybití. SLIM se proto vypnul. Podle telemetrických údajů jsou solární články SLIM otočeny na západ. Takže pokud sluneční světlo začne svítit na měsíční povrch od západu, existuje možnost výroby energie a my se připravujeme na zotavení. SLIM může fungovat pouze s napájením ze solárních článků. Až do vypnutí napájení po přistání se úspěšně přenášela technická a obrazová data získaná při sestupu při přistání a na měsíčním povrchu. V současné době tým provádí podrobnou analýzu a získáno bylo poměrně dost dat. Na konec týdne se připravují informace o konečném stavu a výsledku přistání. LEV-1 už též nevysílá, ale podařilo se spojení se Zemí a na další informace se čeká. Jak dopadl LEV-2 není známo. Tyto informace zapracuji také do článku jako aktualizaci.
Velice děkuji za shrnutí všech dostupných informací.
Rádo se stalo. Já děkuji za přečtení a reakci.
Díky moc za takové shrnutí, a ještě navíc s aktualizovanými informacemi. Skvělé, že jste se tomu takhle pověnoval, protože takováto mise je opravdu zajímavá a informace se jinde shánějí obtížně a po střípcích.
Není zač. Jsem rád, že takové informace čtenáři oceňují.
Je šance najít SLIM na snímcích LRO při jeho velikosti?
Přiznám se, že netuším, ale na palubě je koutovy odražeč NASA, který LRO je schopná zaměřit laserem. Jak to nedávno předvedla u modulu Čandraján-3. Záleží ale v jaké poloze sonda SLIM je.
Osobně si myslím, že ho najde. LRO našla všechno kromě Luny 9 a 13, ty právě jsou malé a navíc možná kdysi byl problém s lokalizací. Ale našla i Surveyory a to žádná monstra nejsou.
Díky za skvělý souhrnný článek. Je fajn připomenout i historii mise, když jsem četl o „Selene“, tak mi v mozku cinklo, že jsem o tom kdysi dávno už někde něco četl, ale po těch letech by mě třeba nenapadlo, že to má přímou souvislost se současnou misí SLIM. Takže je opravdu fajn, když to někdo sleduje dlouhodobě a dokáže popsat souvislosti.
Zájem čtenářů mě velice těší. Osobně rád tvořím takto zaměřené články. Já děkuji za zpětnou reakci.
Zdravím!! Moc děkuji autorovi za článek! Japoncům jsem přál aby se to povedlo, myslím že jsou hodně šikovní nato že toho moc nemají….. těším se na další aktuální zprávy z této mise. Dle mě je to úspěch.
Ještě jednou díky!
Děkuji za pochvalu. Japonci jdou na spoustu věcí trochu jinak než je běžné. Jsou to hračičkové, bych tak řekl. Jen je škoda malého rozpočtu na kosmonautiku.
Mame tu update aj s fotkou!
https://www.livemint.com/science/japan-slim-moon-mission-update-jaxa-releases-1st-image-says-landing-was-around-55-metres-from-target-11706166245572.html
Jen jedna připomínka. Přistát na Měsíci se podařilo Sovětskému Svazu. Rusku se to ještě nepodařilo.
Každopádně nás čeká napínavý víkend, to by se totiž mohlo podařit spojení se SLIMem. Stojí sice na hlavě, ale to by nemuselo vadit.
Ano, proto je to i v textu uvedeno.