
V minulém díle jsme se věnovali návrhu záchranné lodi pro vesmírnou stanici, který se bohužel nakonec neuskutečnil. Samotný stroj byl výsledek kombinace domácího výzkumu a vývoje vztlakových těles s přihlédnutím k výsledkům objevené sovětské práce, tedy stroje BOR-4. Kombinací studií vznikl návrh, který i dnes promlouvá do budoucnosti v podobě stroje Dream Chaser. Nás však dnes bude zajímat úplně jiný stroj. Na první pohled by čtenář mohl usoudit, že už něco podobného viděl a měl by naprostou pravdu. Jedná se o další ze strojů, který se inspiroval vývojem vztlakových těles. V tomto případě se jedná o evoluci slavného a velmi úspěšného návrhu SV-5, jinak také X-24A. V tomto případě se opět jednalo o možnost využití stroje, jako záchranné kosmické lodi, ale s jednou novinkou, která se u předchozích pilotovaných strojů nepoužila.
X-38 „Vesmírný záchranář“

Zdroj: dvidshub.net
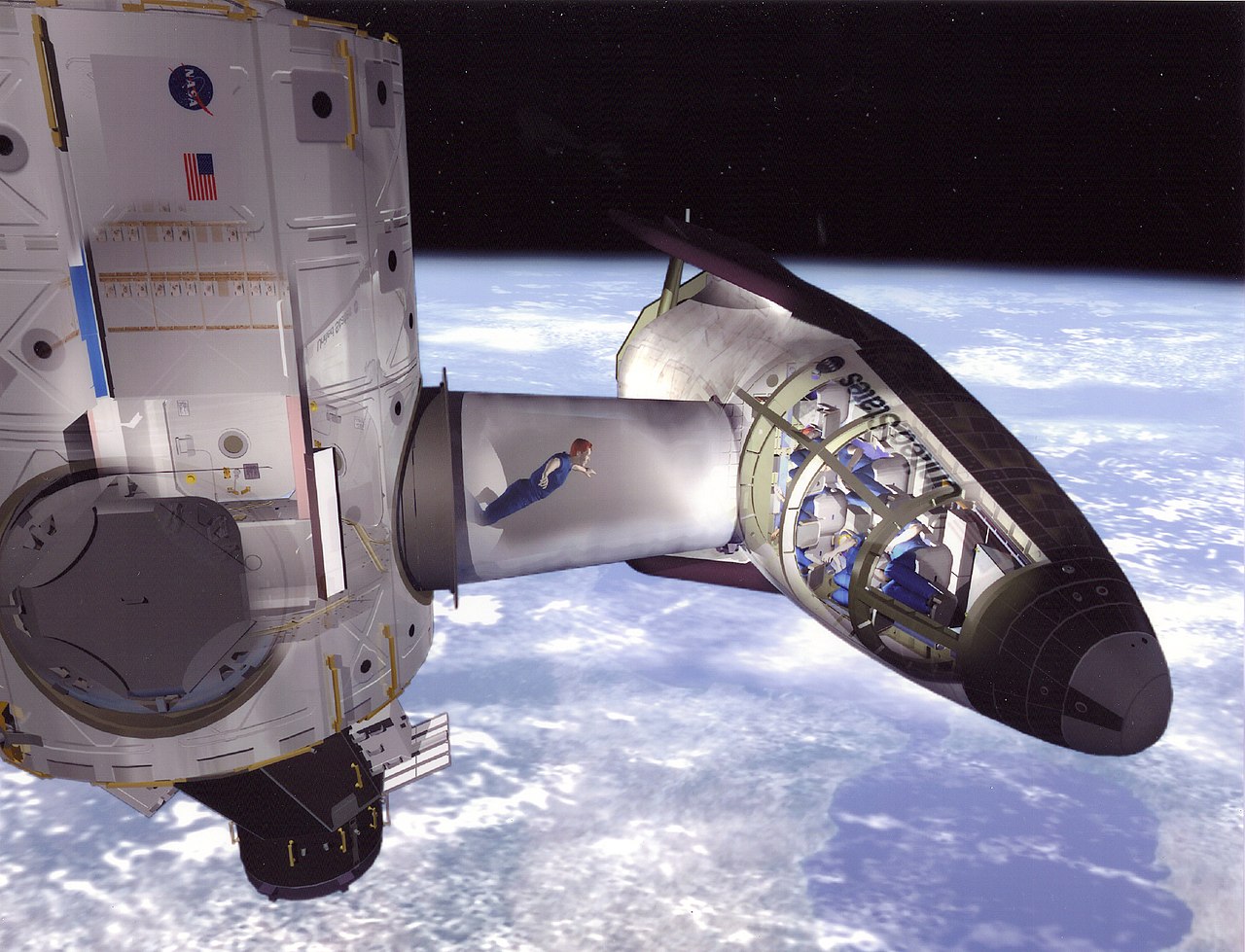
V 90. letech panovala jistá obava o dostupnosti ruské lodě Sojuz, která měla sloužit nejen k dopravě kosmonautů k Mezinárodní vesmírné stanici a zpět, ale i jako záchranné plavidlo v případě havarijní situace na palubě ISS. Už v době vývoje HL-20 bylo jako CERV (Crew Emergency Return Vehicle) plavidlo, pro nově vznikající stanici, označen ruský Sojuz. I přes další úvahy o využití HL-20 byl nakonec projekt ukončen, i díky použití dvou Sojuzů připojených ke stanici. Obavy z dostupnosti ruských plavidel vytvářela i turbulentní doba devadesátých let, kdy se ruská kosmonautika zmítala ve značných problémech, stejně jako celé Rusko a jeho ekonomika. Zajímavostí je, že předchozí projekt HL-20 nebyl realizován kvůli využití Sojuzů, ale nový projekt X-38 byl zahájen zase kvůli Sojuzům. Dalším důvodem byl i americký raketoplán, který mohl setrvat u stanice pouze po omezenou dobou a jeho využití, jako záchranného plavidla bylo nemyslitelné. Tím vznikla právě potřeba mít u stanice dlouhodobě připojený stroj, který by zastoupil Sojuz a raketoplán, v případě jejich nedostupnosti. Značným rozdílem oproti HL-20 byla celá koncepce stroje. S HL-20 se kromě využití jako záchranného pilotovaného prostředku uvažovalo i jako o vesmírném servisním plavidle či pro krátkodobé samostatné mise. X-38 měl jediný účel, a to CRV (Crew Return Vehicle) se třemi možnými scénáři použití.
- Návrat posádky v případě nedostupnosti raketoplánu, Sojuzu nebo zásobování
- Rychlá evakuace ze závažné, časově kritické nouzové situace
- Plná nebo částečná evakuace v případě zdravotního ohrožení
Zdroj: en.wikipedia.org
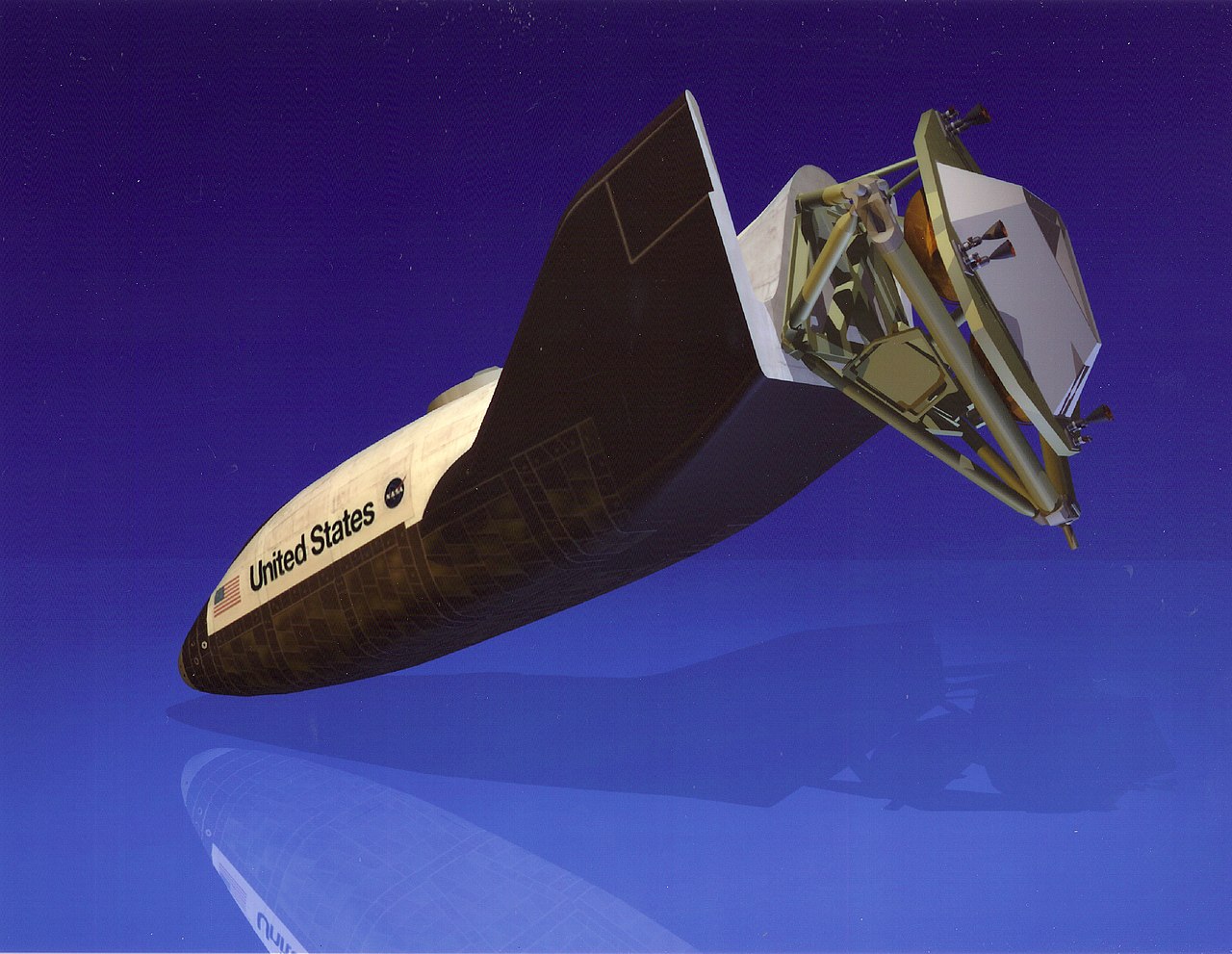
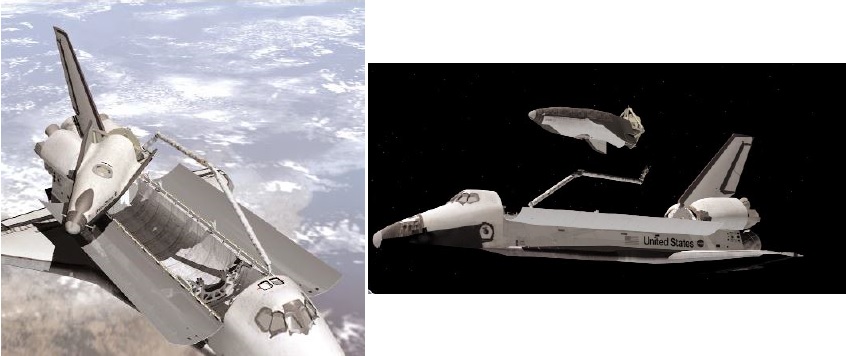
Celá myšlenka navazující na HL-20 vznikla v době, kdy byl administrátorem NASA Daniel Goldin, který se snažil aplikovat svůj koncept „Lépe, rychleji, levněji“, který byl posléze v rámci projektu kritizován. V rámci návrhu nového stroje došlo k uzavření dohody o spolupráci mezi NASA, ESA a DLR (Deutsches Zentrum für Luft – und Raumfahrt/ German Center for Air and Space-flight). Samotný stroj byl původně označen jako X-35, ale velmi brzy byl přeznačen na X-38 X-CRV (eXperimental – Crew Return Vehicle), protože označení X-35 bylo v té době obsazeno letectvem. X-38 měl být stroj, který bude pracovat v bezpilotním režimu, tedy v plně automatickém režimu, kdy posádka nastoupí na palubu a X-38 provede návrat na Zemi v plně automatickém režimu, bez možnosti zásahu své posádky. V tomto případě se tedy z posádky stávají pouze pasivní pasažéři. Důvodem tohoto uspořádaní byl předpoklad, že část posádky nebude třeba ani schopna ovládat svůj záchranný člun. Samotná konstrukce měla být složena ze samotného vztlakového tělesa, dokovacího zařízení a Deorbit Propulsion Stage, tedy modulem v zadní části stroje, který se postará o navedení zpět do atmosféry. Jednou z možností bylo i využití raketoplánu, kdy konstrukce X-38 byla uzpůsobena tak, aby mohl být uložen v nákladovém prostoru. Samotná úprava spočívala v úpravě vertikálních stabilizátorů, konkrétně jejich sklápěním do vnitřní strany. Další možností startu bylo využití některé z raket. Vzhledem k účasti ESA se, tak jednalo především o raketu Ariane 5. Hlavním rozdílem oproti běžným vztlakovým strojům, které přistávaly na zemi za použití klasického podvozku, zde bylo použito padákového systému. Konkrétně se jednalo o parafoil/padákové křídlo, navržené společností Pioneer Aerospace, vypouštěné zcela automaticky za pomoci systému GPS. Samotný padák patřil ve své kategorii k největším na světě s celkovou plochou okolo 700 m². Jak již bylo uvedeno, vnitřní konstrukce kluzáku nedovolovala umístění pohonného a OMS systému (Orbital Maneuvering System), kvůli zachování vnitřního prostoru pro posádku. Všechny tyto potřebné systémy byly přesunuty do externího modulu uchyceného v zadní části stroje. Stupeň DPS (Deorbit Propulsion Stage) obsahoval osm raketových motorů o tahu 100 lbf (0,44 kN) spalujících hydrazin. Doba činnosti byla deset minut. Dalších osm trysek pak využíval manévrovací systém OMS. Celý modul byl po navedení na sestupovou dráhu odhozen. Další změnou oproti všem vesmírným lodím byla absence průzorů pro výhled ven. Bylo to z důvodu zjednodušení konstrukce a zvýšení bezpečnosti, protože každé „okénko“ v konstrukci navyšuje značně hmotnost a zvyšuje složitost celého řešení. Namísto toho měl být využit systém virtuálního zobrazení v reálném čase.
Zdroj: en.wikipedia.org
Při pohledu do historie celého projektu zjistíme, že první počátky budoucího X-38 začaly už v roce 1991, kdy NASA středisko v Ames zahájilo program Spacecraft Autoland Project. Hlavním cílem projektu bylo určení proveditelnosti autonomního návratu kosmické lodě s využitím parafoilu/padákového křídla s přesným přistáním v závěrečné části letu. Na celém programu spolupracovalo středisko i s Johnson Space Centre a USAF. Zde se na scéně objevuje i Dale Reed, otec vztlakových těles. Dale Reed se dostal k programu svým způsobem náhodou. Během výroční mezinárodní parašutistické konference se potkal se svým přítelem Johnem Kikerem, který byl v dobách programů Gemini a Apollo zodpovědný za vývoj padáků pro tyto kosmické lodě. Právě během tohoto setkání byl Reed seznámen s Robem Meyersonem, který vedl vývoj padáků v JSC. To byl právě ten moment, kdy se Dale Reed dozvěděl o plánovaném X-38. Po vyslechnutí celé myšlenky se pro tento nápad zcela nadchnul a zcela typicky pro něj navrhnul stavbu zmenšeného modelu, na kterém by byly ověřeny všechny plánované systémy. Nejvíce asi Reeda zaujala myšlenka řízení pomocí systému GPS. Reed se tak pustil se svým týmem z FRC do stavby modelu s padákovým křídlem a rádiovým řízením s využitím automatického systému GPS. Tak jako tomu bylo kdysi, nadšení celého týmu bylo znát v každé činnosti. Příkladem může být inženýr David Neufeld, který kromě balení padáku měl na starost i rádiové řízení. Aby lépe porozuměl své roli pilota, neváhal a nastoupil na parašutistický kurz, i když se měl účastnit pouze dvou lekcí. Podle jeho slov to bylo dostatečné pro to, co potřeboval vědět. Po provedení základních testů systému bylo navrženo použít jako základní tvar celého stroje osvědčený X-24A. Bylo to zcela logické rozhodnutí, protože to byl jediný tvar stroje z celé kategorie, který De facto prošel celou trajektorii od vstupu do atmosféry až po přistání. Pro přehledné vysvětlení se jednalo o tvar SV-5 využitého už pro X-23 PRIME, který byl vynesen na vrcholu rakety nad hranice atmosféry, aby pak provedl řízený návrat až do rychlosti M=2. Na to pak úspěšně navázal právě X-24A, který létal zbylé dvě rychlostní oblasti. Dalším logickým důvodem, který plně korespondoval i s heslem „Lépe, rychleji, levněji“ byla plně prověřená a vyzkoušená aerodynamika stroje. Na tuto myšlenku tak slyšelo i nejvyšší vedení NASA.

Zdroj: en.wikipedia.org
nationalmuseum.af.mil
V obecných úvahách o prvotním návrhu byly ve hře tři možnosti, a to použití klasického návratového modulu/kapsle, mini raketoplánu a třetí byla kategorie vztlakových těles. První varianta byla zamítnuta hned na začátku úvah, protože po odpojení od stanice by musela loď počkat, než přistane na vhodném místě, tedy plánování bodu vstupu a v případě nouzového opuštění stanice ze závažných zdravotních důvodů to ani nedávalo smysl. U druhé možnosti by to znamenalo nový vývoj, což nebylo v souladu s filozofií původního záměru, aby se vymyslel levný, rychle dostupný stroj. Navíc by takový stroj potřeboval sofistikovanější systém řízení během vstupu s vysokým úhlem náběhu. Třetí možnost se tak zdála jako nejlepší volba i z pohledu logistiky zajištění záchranné akce. Nebylo nutné udržovat žádnou flotilu lodí či systém přistávacích drah s dostatečnou délkou pro přistání. To byl nakonec i důvod, proč bylo zvoleno použití padáků místo řízeného přistání. Základ byl použít co nejjednodušší systém. Nutno dodat, že další důvod k použití padáků je velikost stroje. Stroje o velikosti X-24A přistávaly většinou s přistávací hmotností okolo 2700 Kg, stroje o větší velikosti a tím i hmotnosti tak zákonitě potřebují k letu a přistání vyšší rychlost. V průběhu seriálu jsme mohli vidět, jak může let vztlakového tělesa skončit nehodou, i když ne přímo vlivem vysoké rychlosti na přistání. V případě nouzového návratu nechcete posádku více ohrožovat.
Po diskusích o celkovém uspořádání stroje byly nakonec rozděleny úkoly mezi středisko Ames-Dryden Flight Research Center (DFRC) a Johnson Space Centre. Pro vysvětlení ke středisku DFRC uvedu, že se jedná o nám dobře známé FRC středisko na Edwards AFB, které bylo 26. března 1976 přejmenováno na NASA Ames-Dryden Flight Research Center (DFRC), aby bylo následně přejmenováno 1. března 2014 na středisko Neila Armstronga (AFRC). DFRC středisko si vzalo na starost přípravu nosného letounu NB-52 a výrobu pylonu, pod který bude X-38 umístěn. Středisko Johnson Space Centre se zabývalo samotnou konstrukcí a výrobou. Jen pro připomenutí, pro základnu Edwards to znamenalo návrat vztlakových těles po dvaceti letech.

Zdroj: collectspace.com
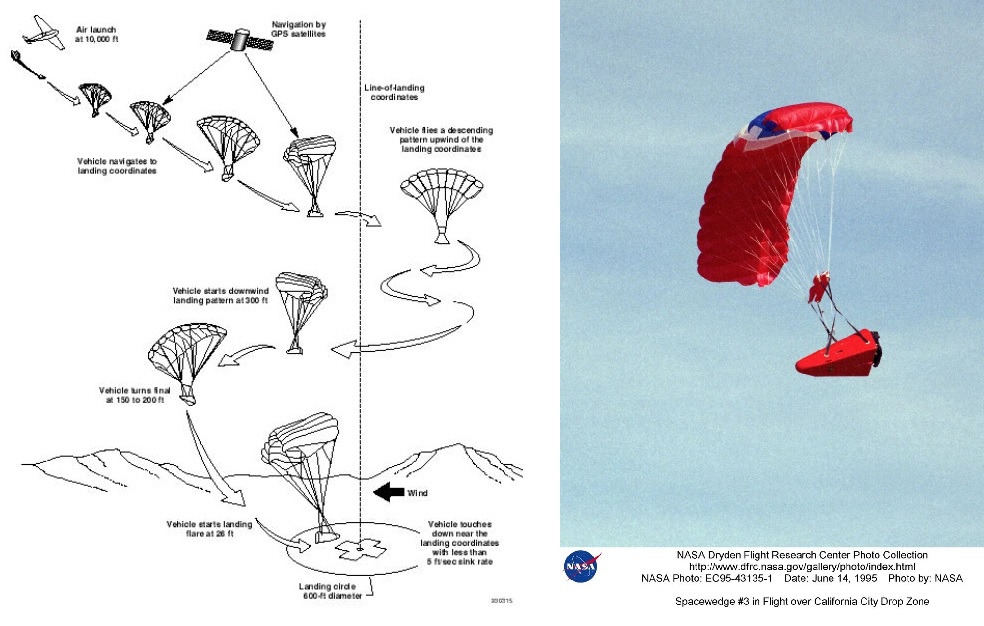
Kontrakt na stavbu prvních zkušebních strojů získala společnost Scaled Composites sídlící v Mohavské poušti. Společnost tak měla postavit tři plnohodnotné kusy určené po letové zkoušky prováděné ve spolupráci s letounem NB-52. První kus dorazil do JSC v roce 1995. První kus stroje se lišil od ostatních díky absenci vertikálních stabilizátorů. Tento kus absolvoval padákové zkoušky v Yumě, ve státě Arizona, které však nedopadly nejlépe. Shoz probíhal z paluby letounu C-130, kde byl X-38 uložen na kovové paletě a pomocí výtažného padáku vytažen mimo letoun. Shoz se však nepodařil, protože došlo k deformaci úložné palety, která tak zatížila nerovnoměrně padákové šňůry, což vedlo k jejich přerušení a následně k nevyhnutelnému, tedy pádu X-38 a jeho zničení. Zbylé dva kusy byly dodány v roce 1996 do střediska Dryden na základně Edwards, kde už tradičně probíhala instalace vnitřního vybavení. Co se týče vnitřního vybavení, je nutné opět zmínit projekt Spacecraft Autoland Project, který předcházel X-38 a měl vliv právě na X-38. V krátkosti se jednalo o projekt s cílem zjistit proveditelnost autonomního návratu kosmické lodi pomocí systému padákového křídla pro závěrečné fáze letu, včetně přesného přistání. Projekt byl rozdělen do třech fází s označením Wedge. Byly postaveny celkově čtyři stroje, které byly vyneseny pod upraveným letounem Rans S-12 RPV nebo Cessna U-206. Po vynesení do výšky 3 km došlo k odhození Wedge, který by mohl svým tvarem mnohým připomínat demonstrátor ASSET. Po odhozu došlo postupně k otevření padáku. Systém bylo možné řídit dálkově pomocí radiové aparatury nebo autonomně za pomoci vnitřních senzorů a systému GPS. Výsledky tohoto projektu a systémy pak byly přímo využity v X-38.
Zdroj: dvidshub.net/
NASA Facts Spacewedge
Letové zkoušky začaly tradičně společným letem v konfiguraci s letounem NB-52 následované bezpilotními lety po odpojení od nosného letounu. Po odpojení pokračoval X-38 samostatným letem, kdy došlo k uvolnění padákového systému a následnému řízenému přistání v cílové oblasti u základny. To vše v autonomním režimu. Toto byla první etapa zkoušek, která se pak měla přesunout na orbitální dráhu. V plánu bylo vynést X-38 na palubě raketoplánu a posléze jej vypustit na oběžné dráze. Stroj měl pak provést řízený návrat. Poslední etapou, plánovanou na rok 2003, bylo dokování u ISS, zde se však zdroje rozcházejí. Ke druhé a třetí etapě však bohužel nikdy nedošlo. U třetí možnosti se na chvilku zastavíme, protože se stala i předmětem vnitřního auditu NASA. Auditor NASA obecně kritizoval velmi rychlý vývoj, a hlavně výrobu prototypů. Dalším bodem je zmíněná možnost dokování u ISS. Podle dostupných informací měl být, podle původního záměru NASA, X-38 testován na oběžné dráze, nikoliv u ISS s následným návratem. Právě tento záměr byl kritizován z několika míst.
Zdroj: The X-38: Low-Cost, High-Tech Space Rescue
V rámci kontraktu byly postaveny tři stroje, přičemž první byl zničen a zbylé dva byly označeny jako V-131, V-132 a v plánu bylo pak postavit další s označením V-201. První dva kusy sloužily pro zkoušky s padákovým systémem a jeho řiditelností, která byla navíc podporována i z mobilního zařízení na Zemi. Mobilním zařízením se rozuměla dodávka upravená tak, aby v ní mohli pracovat dva piloti, kteří dokázali řídit stroj dálkově. X-38 s označením V-131 byl v průběhu programu přepracován na verzi V-131-R, která se více podobala plánované orbitální verzi, tzn. zadní část stroje byla uzpůsobena do tvaru, který by umožnil montáž Deorbit Stage. Navržená velikost tak odpovídala cca 80 procentům plánované velikosti. Další kus, již čtvrtý, s označením V-201 měl být už prototyp, který by startoval na palubě raketoplánu. Pro tento let už měl být stroj opatřen termální ochranou tvořenou dlaždicemi a sklopnými vertikálními stabilizátory, které se sklápěly do vnitřní strany. Tato funkce sloužila k tomu, aby mohl být X-38 uložen v nákladovém prostoru. Z technického pohledu byl X-38 obecně vybaven elektricky ovládaným systémem řízení, který byl mnohem lehčí než hydraulický systém. Další novinkou u plánované kosmické lodě s posádkou byl systém odpalovaní pyrotechnických prostředků padákového systému s využitím laserového ovládaní.
Jak už bylo zmíněno, projekt X-38 byl nakonec zrušen v roce 2002 i s CRV. Důvodem zrušení programu byly finance. V té době probíhala výstavba ISS, která značně zatěžovala rozpočet NASA. Agentura se potýkala s nedostatkem 4 miliard USD, a proto radikálně přepracovala rozsah ISS. Přepracovaný návrh však už nepočítal s X-38, jako CRV prostředkem. V té době byl stroj dokončen z 90 procent.

Zdroj: en.wikipedia.org
Závěrem si opět dovolím přidat zajímavá videa z projektu X-38. Velmi pěkně je zde vidět vypuštění padáku s jeho následným rozložením.
[youtube https://www.youtube.com/watch?v=b2lpYyAAG8E?feature=shared] [youtube https://www.youtube.com/watch?v=u7dKlL5m9Kw?feature=shared]
[youtube https://www.youtube.com/watch?v=0asCERKmlnU?feature=shared]
EDIT 12.06.2024 14:00
Přidáno video zachycující letovou sekvenci X-38 ve skvělé kvalitě. Na video upozornil čtenář portálu.
Děkuji
Zdroje informací:
Wingless Flight, The Lifting Body Story, Autor R. Dale Reed, Rok vydání 1997
NASA FACT SHEET, The X-38: Low-Cost, High-Tech Space Rescue, Rok vydání 2000
astronautix.com/
collectspace.com/
en.wikipedia.org/
en.wikipedia.org
nasa.gov/
Zdroje obrázků:
NASA FACT SHEET, The X-38: Low-Cost, High-Tech Space Rescue, strana 2,3
NASA Facts Spacewedge, strana 4
esa.int/var/esa/storage/
d1ldvf68ux039x.
en.wikipedia.org/wiki
en.wikipedia.org/wiki/
nationalmuseum.af.mil
en.wikipedia.org/
collectspace.com/
d1ldvf68ux039x.
en.wikipedia.org/wiki/





{kind=link}
{kind=link}
.jpg){kind=link}
.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}