
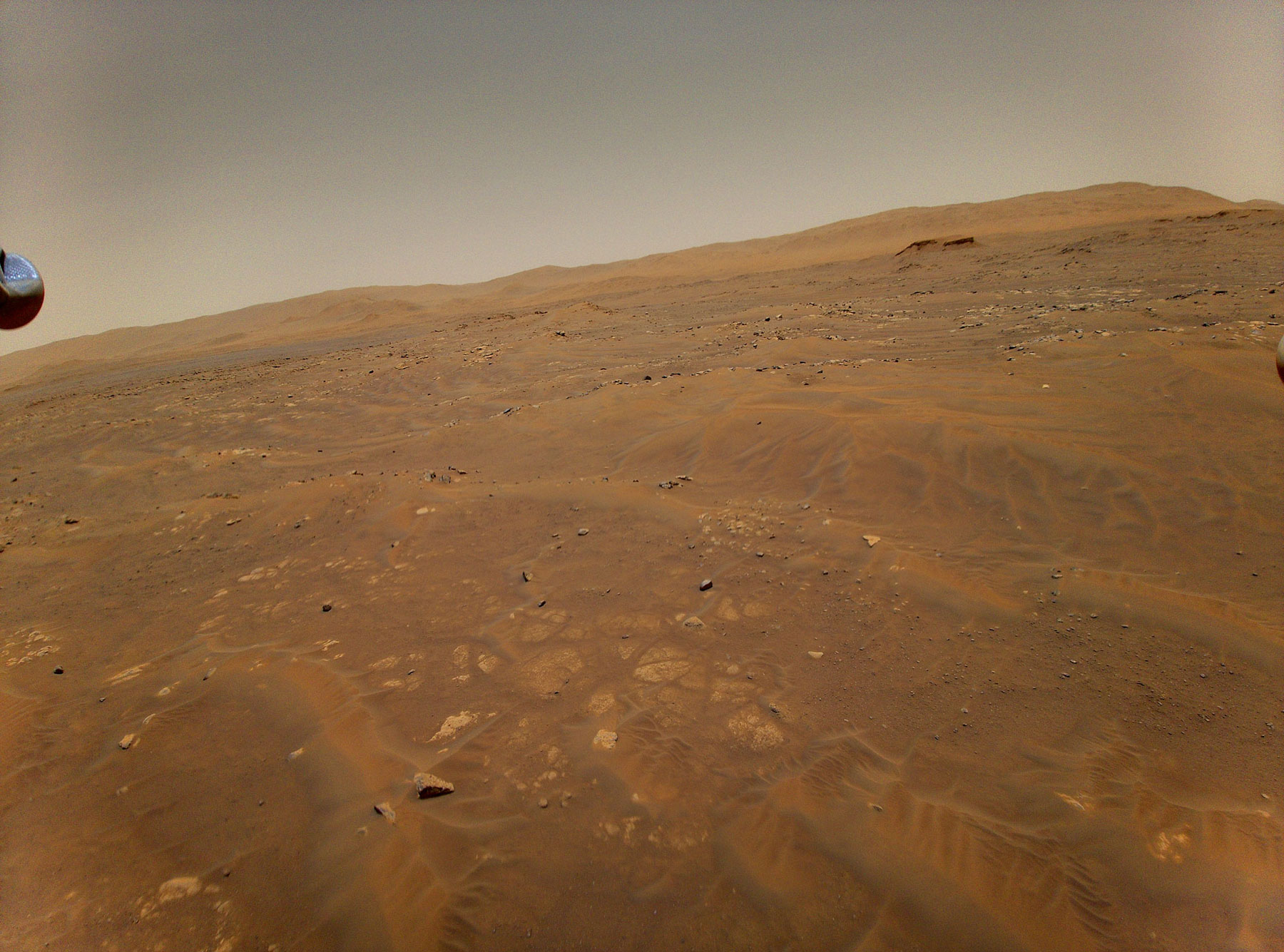
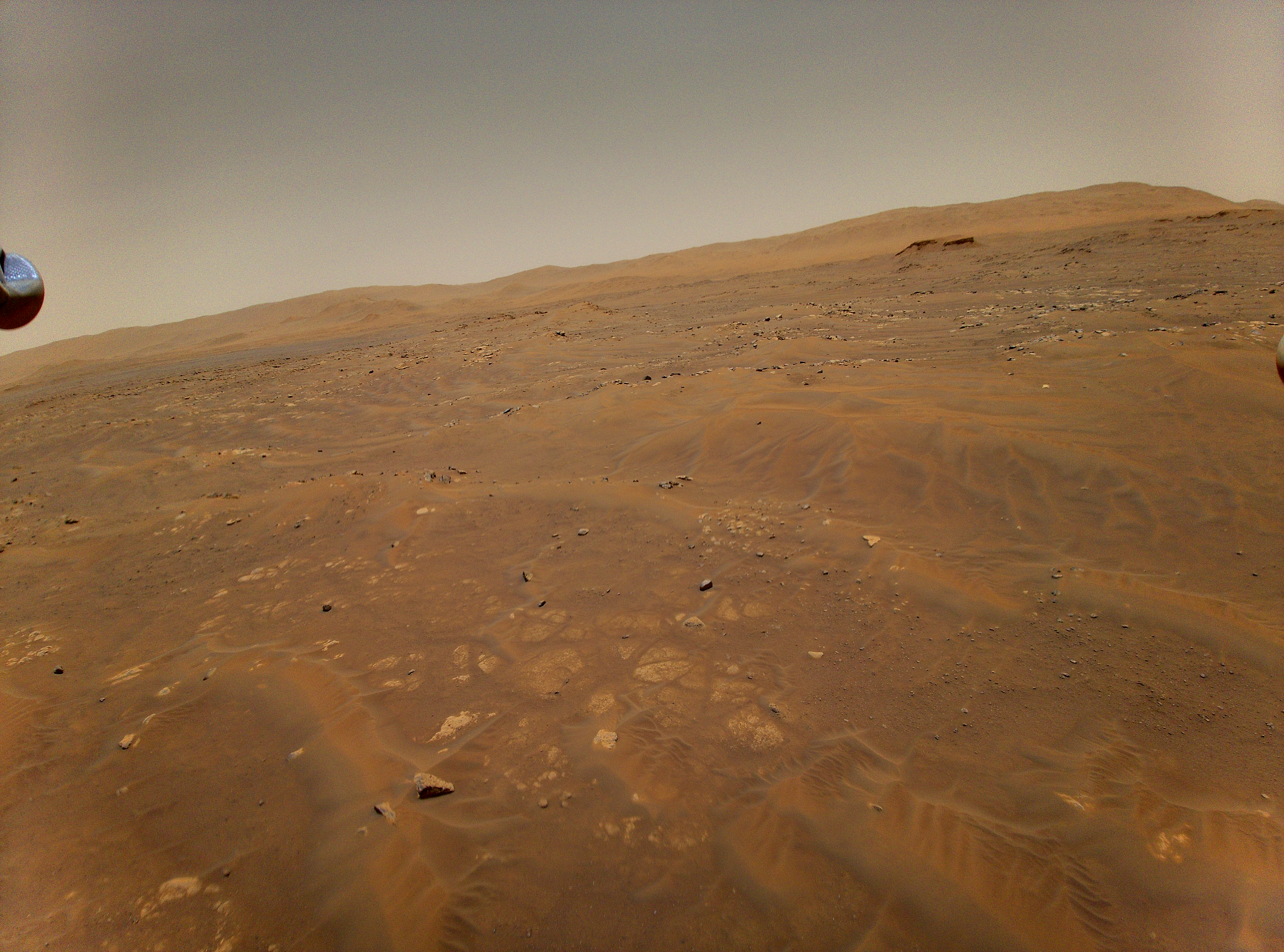
Psal se 91. sol (marsovský den) pobytu roveru Perseverance na Marsu, když malý vrtulník Ingenuity podnikl svůj šestý let. Ten byl navržen tak, aby opět rozšířil možnosti stroje a demonstroval možnost provádět snímkování z ptačí perspektivy. Vrtulník měl zkusit vytvořit stereo (3D) snímky vědecky atraktivní oblasti směrem na západ. Vrtulník dostal pokyn, aby vystoupal do výšky 10 metrů a poté měl zamířit 150 metrů směrem na jihozápad při horizontální rychlosti 4 m/s. Poté měl zamířit 15 metrů jižně a v té době měla jeho kamera koukat západním směrem a pořizovat snímky, ze kterých vzniknou 3D obrázky. Poté se měl vrtulník vydat dalších 50 metrů směrem na jihovýchod, kde měl přistát.
Telemetrie ze šestého letu ukázala, že první fáze s délkou 150 metrů byla v pořádku, ale přesto se na konci této fáze objevily drobné odchylky. Vrtulník během letu začal upravovat svou rychlost a pravidelnou oscilací se nakláněl dopředu a dozadu. Toto chování přetrvalo po celou dobu letu. Před bezpečným přistáním zaznamenaly palubní senzory, že vrtulník zažíval náklony ve dvou osách (klonění a klopení) více než 20 stupňů, dále byl vystaven velkým vstupním hodnotám a zažíval špičky v odběru elektrické energie.
Doplním ještě video z posledních 29 sekund šestého letu vrtulníčku #Ingenuity. Závěr je naštěstí šťastný. ❤️🚁 pic.twitter.com/xoOOQWEdVX
— Michal Vaclavik (@Kosmo_Michal) May 27, 2021
Jak Ingenuity vyhodnocuje pohyb?
Když je vrtulník „ve vzduchu“, sleduje svůj pohyb pomocí inerciální měřící jednotky IMU (inertial measurement unit). IMU sleduje akceleraci Ingenuity a úroveň rotace v jednotlivých osách. Když se tyto hodnoty průběžně vyhodnocují, je možné z nich odhadnout pozici stroje, jeho rychlost a orientaci (kde je, jak rychle se pohybuje a jak je orientován v prostoru). Palubní řídící systém reaguje na tento odhadnutý pohyb tím, že velmi rychle (500× za sekundu) upravuje řídící vstupní hodnoty.
Zdroj: https://mars.nasa.gov/
Pokud by navigační systém spoléhal pouze na IMU, nebylo by to v delším časovém horizontu moc přesné. Chyby by se rychle nakupily a vrtulník by brzy ztratil přehled o své dráze. Aby bylo dosaženo větší přesnosti v průběhu času, jsou odhady z IMU pravidelně korigovány pomocí palubní navigační kamery. Po většinu letového času pořizuje dolů směřující kamera snímky marsovského povrchu s frekvencí 30 fotek za sekundu. Tyto fotky okamžitě míří do palubního navigačního systému. Pokaždé, když dorazí nová fotka, provedou algoritmy navigačního systému sérii činností. Nejprve je prozkoumán časový kód přijatý spolu se snímkem, který udává, kdy přesně, byla fotka pořízena. Poté algoritmus vypočítá, co měla kamera přesně v onu danou chvíli vidět – jde o povrchové útvary, které se dají rozeznat na předešlých snímcích pořízených jen o zlomek sekundy dříve. Nakonec se algoritmus podívá, kde přesně se v aktuálním snímku dané útvary skutečně nachází. Navigační algoritmy pak použijí rozdíl mezi předpokládanou a skutečnou pozicí útvarů ke korekci předpokládané pozice, rychlosti a orientace Ingenuity.
Anomálie při šestém letu
Zhruba 54 sekund po vzletu se v proudu snímků od navigační kamery objevila nepřesnost. Ta byla způsobena tím, že se ztratil jeden jediný snímek. Ještě důležitější však bylo, že všechny snímky, které byly poté přijaty, měly nepřesný časový kód! Od této chvíle pokaždé, když navigační systém provedl korekci založenou na navigačních snímcích, pracoval s nepřesnou informací, kdy byl navigační snímek pořízen. Výsledná nekonzistence výrazně zhoršila kvalitu informací využívaných letu vrtulníku. To vedlo k tomu, že byly parametry neustále korigovány, aby vyrovnaly ve skutečnosti neexistující chyby – následkem byly velké oscilace.
Ingenuity anomálii zvládla

Zdroj: https://mars.nasa.gov/
Navzdory této neplánované situaci se Ingenuity podařilo pokračovat v letu – stroj nakonec přistál na povrchu jen zhruba 5 metrů od zamýšleného místa přistání. Jedním z důvodů, proč se to povedlo, bylo značné úsilí, které pozemní tým vynaložil na zajištění toho, aby systém řízení letu vrtulníku měl dostatečnou „stabilní rezervu“. „Navrhli jsme Ingenuity tak, aby dokázala tolerovat i významné chyby, aniž by se to projevilo na její stabilitě, což se týká i chyb v časování. Tato integrovaná rezerva nebyla v předchozích letech Ingenuity plně potřebná, protože chování stroje bylo v souladu s našimi očekáváními, ale tato rezerva přišla na pomoc právě při šestém letu,“ píše Håvard Grip, hlavní pilot Igenuity z JPL na blogu mise.
Úspěšnému přistání Ingnuity pomohlo i další rozhodnutí přijaté během vývoje mise. „Jak jsme již informovali dříve, přestali jsme během závěrečné fáze sestupu používat snímky z navigačních kamer, abychom zajistili jemné a nerušené odhady pohybu vrtulníku v této kritické fázi. Toto rozhodnutí se při šestém letu opravdu vyplatilo,“ píše Håvard Grip na blogu mise. Ingenuity ignorovala v závěrečné fázi snímky z navigační kamery, přestala oscilovat, srovnala svou orientaci a dosedla předepsanou rychlostí.
Celkově můžeme říct, že Igenuity při šestém letu přistála úspěšně díky celé řadě svých subsystémů – od rotorů, přes aktuátory po energetický systém. Všechny reagovaly správně na zvýšené požadavky pro udržení stroje „ve vzduchu“. Zcela bez přehánění můžeme říct, že Ingenuity si s touto situací poradila skvěle. Zápolila sice s problémy kolem časování, které se nyní budou muset zohlednit, ale také potvrdila robustnost svých systémů a to hned v několika různých ohledech. „Ačkoliv jsme neplánovali takhle stresující let, má nyní NASA k dispozici data ukazující, kam až dosáhnou schopnosti tohoto vrtulníku. Nyní se tato data pečlivě analyzují a jejich rozbor bude pokračovat. Rozšíříme tím naši základnu vědomostí o letech vrtulových strojů na Marsu,“ uzavírá Håvard Grip na blogu mise.
Přeloženo z:
https://mars.nasa.gov/technology/
Zdroje obrázků:
https://d2pn8kiwq2w21t.cloudfront.net/images/jpegPIA24547.width-1600.jpg
https://mars.nasa.gov/system/downloadable_items/46155_PIA24600.png
https://mars.nasa.gov/system/downloadable_items/46154_PIA24599.png





{kind=link}
{kind=link}
{kind=link}
Pěkně rozebrané. Výpadek snímku z kamery by měl být celkem běžným provozním problémem, se kterým si řídící systém musí umět poradit. Právě proto (a také kvůli zpoždění při zpracování snímků) má každý snímek časový kód. Situace, kdy výpadek snímku způsobí u ostatních posunutí časového kódu, je dost neobvyklá a ve svém důsledku vážná – jedna chyba způsobila i selhání mechanismu, který ji měl opravit. Naštěstí to dobře dopadlo a snad pošlou update, který závadu opraví.
Nějak mi v článku chybí informace o výsledku snímkování pro 3D zobrazení. Jestli budou snímky použitelné podle záměru, nebo jsou incidentem znehodnocené.
Tato informace bohužel není k dispozici.