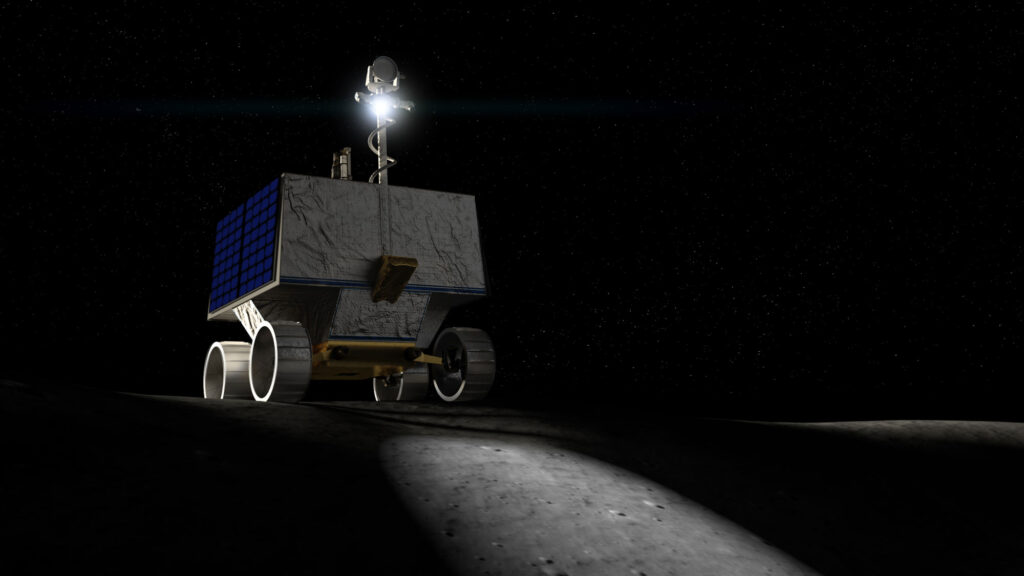
Pokud by se nějaký šikovný kutil pustil do rozebírání robotického vysavače, samořiditelného auta nebo dokonce marsovského vozítka (což prý NASA rozhodně nedoporučuje!), našel by velké množství procesorů, které s pomocí příslušného softwaru fungují jako „mozek“ tohoto robota. Tyto robotické mozky zajišťují veškeré pohyby a činnosti stroje, ale chystaný americký lunární rover VIPER (Volatiles Investigating Polar Exploration Rover) určený k pátrání po vodním ledu bude mít jako první v historii své „mozky“ rozdělené do dvou částí.
Při jízdě po povrchu Měsíce bude VIPER rozmýšlet své činnosti na základě dvou zdrojů – jednak využije svůj palubní software, ale také software, který poběží v pozemském řídícím středisku. Tým kolem roveru VIPER před nedávnem použili inženýrský prototyp vozítka, aby na něm otestovali software. Využili k tomu simulovaný povrch Měsíce, který je k dispozici na Ames Research Center v kalifornském Silicon Valley.

Zdroj: https://www.nasa.gov/
„Distribuované výpočty využíváme v dnešní době prakticky neustále, když pracujeme s mobilními telefony, na kterých nám běží mapové aplikace, které se připojují ke vzdáleným serverům a datovým střediskům, kde probíhají výpočty,“ popisuje Terry Fong z Ames Research Center, který má VIPER na starost a dodává: „Podobně i VIPER bude využívat toho, že pozemské počítače dokáží potřebná data zpracovat rychleji, jelikož při všech činnostech vozítka bude zajištěno poměrně rychlé připojení k řídícímu středisku.“
V listopadu začaly zkoušky softwaru, který prokázal, že na prototypu vozítka správně vykonává příkazy. Vývojový tým tedy mohl přejít do vývojového robotického areálu Roverscape, kde jsou svahy, balvany a krátery a provést tam testovací jízdu. Prototyp provedl celou řadu činností – od otáčení na místě či jízdy v přímém směru, přes zaznamenávání své pozice, přizpůsobování podvozku až po udržování orientace antény za jízdy, což má zajistit, že vozítko zůstane v neustálém kontaktu se Zemí.
Zdroj: https://www.nasa.gov/
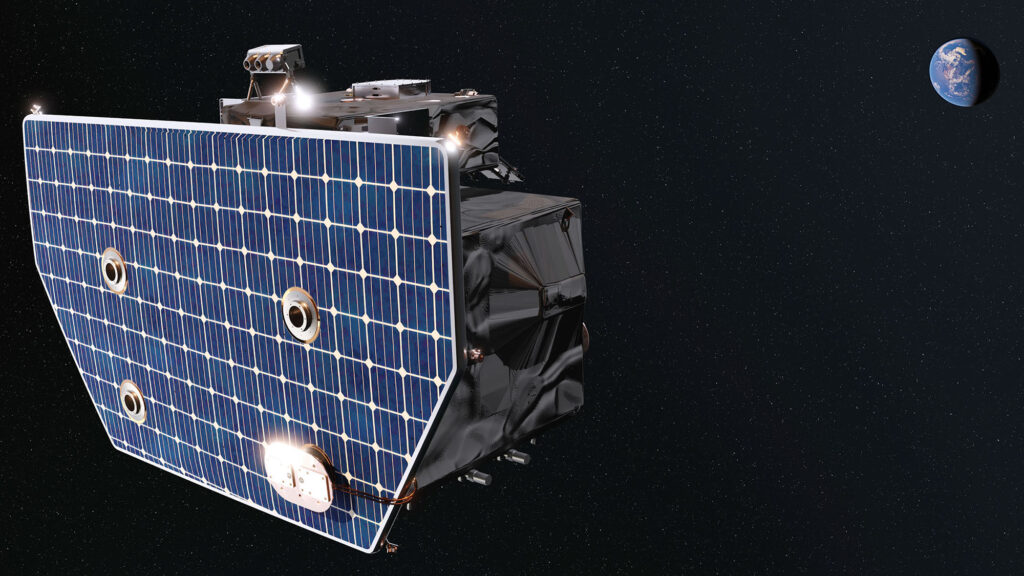
Prototyp Moon-Gravity Representative Unit představuje jakousi očesanou inženýrskou jednotku, která se zaměřuje na mechanické systémy vozítka. Ty jsou speciálně navrženy tak, aby umožnily inženýrům otestovat, jak bude skutečný rover jezdit v podmínkách lunární gravitace, která je oproti pozemské pouze šestinová. Jelikož je Měsíc jen kousek od Země, počítá se komunikační zpoždění jen na nízké sekundy. Inženýři toho chtějí využít k přenosům fotek a dalších dat z vozítka. Tyto údaje se na pozemských výkonných počítačích zpracují, což bude mnohem rychlejší, než pokud by vozítko muselo spoléhat na vlastní palubní systémy, které nejsou tolik výkonné. Kromě urychlení výpočtů se tím také sníží náklady na vývoj roveru.

Zdroj: https://www.nasa.gov/
Rychlejší zpracování dat znamená, že se pozemní týmy budou moci rychleji rozhodovat, kam vozítko pojede a jaké vědecké činnosti má provádět. Tím se dále urychlí všechny činnosti a maximalizuje se množství nasbíraných dat – primární mise roveru VIPER u jižního pólu Měsíce by totiž měla trvat 100 dní a všichni proto chtějí tento čas maximálně využít. „Kromě výhod pro vědu a provoz má vykonávání části výpočtů z VIPERu na Zemi nabídnout výhodu v podobě využití nejnovějších a největších výpočetních center pro zpracování údajů, jejich skladování a distribuci,“ říká Hans Utz, vedoucí softwarový inženýr na Ames.
VIPER se nestane jen prvním vozítkem, které bude využívat distribuované výpočty, ale také se stane prvním mimozemským vozítkem, které využije open-source software včetně klíčových prvků využitých z operačního systému ROS (Robotics Operating System), který je v současné době považován za průmyslový standard pro robotický vývoj. Jakmile mise skončí, plánují experti uvolnil použitý software pro veřejné využití. Tento přístup umožňuje rychlou a finančně příznivou cestu k vývoji softwarových systémů, ze kterých mohou benefitovat budoucí vozítka nejen na Měsíci.
Samotné vozítko VIPER vzniká jako projekt využívající spolupráci různých sekcí NASA i dalších institucí. Projekt je součástí programu Lunar Discovery and Exploration Program, který je řízen Divizí planetárního výzkumu Ředitelství vědeckých misí NASA ve Washingtonu. Ames Research Center spravuje projekt, stojí v čele vědeckého týmu, zajišťuje inženýrské návrhy systémů, povrchové činnosti vozítka v reálném čase a letový software. Hardware vozítka navrhne a postaví Johnson Space Center v Houstonu, přičemž přístroje dodají Ames Research Center, Kennedy Space Center na Floridě a komerční firma Honeybee Robotics z kalifornského města Altadena. Dopravu na Měsíc pomocí landeru zajistí firma Astrobotic z Pittsburghu, která tak učiní na základě programu CLPS (Commercial Lunar Payload Services), který má za cíl dopravovat na Měsíc vědecké a technologické náklady pomocí komerčních landerů.
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/sites/default/files/thumbnails/image/03_viper_hi_res_explore.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/acd20-0069-038.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/viper_software_integration_test-1041.gif
https://www.nasa.gov/sites/default/files/thumbnails/image/acd20-0064-004.jpg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
NASA rovněž důrazně NEDOPORUČUJE sušit kočky v mikrovlnné troubě.