
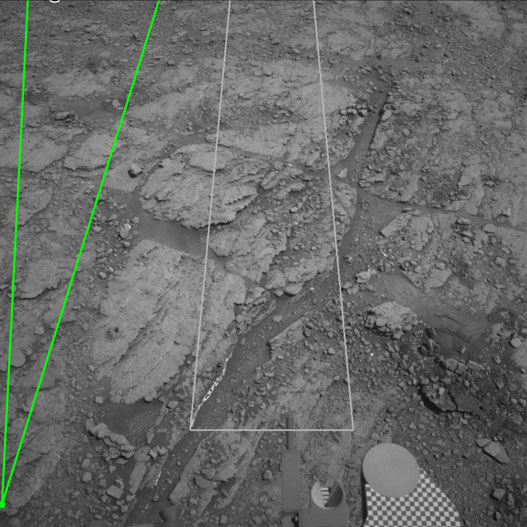
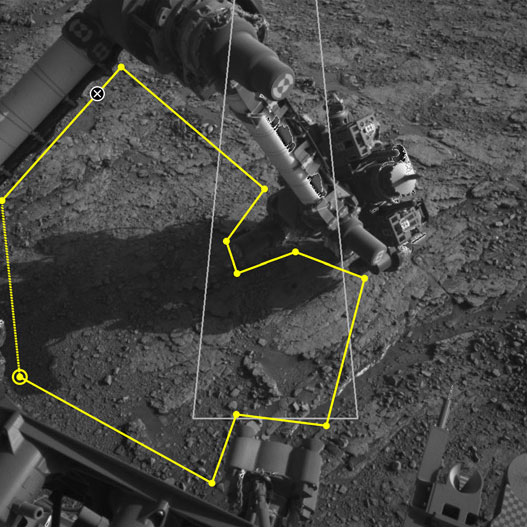
Internetová veřejnost může pomoci řidičům vozítka Curiosity lépe brázdit povrch Marsu. S pomocí online projektu AI4Mars stačí popisovat terénní útvary na snímcích, které rover vyfotil na Marsu. Lidé tak mohou pomoci trénovat algoritmy umělé inteligence, aby zvládaly automaticky posuzovat skutečný terén. Počítač sám zatím nedokáže rozhodnout, zda ta věc nalevo je velký balvan, plochý kámen, nebo jen písek. AI4Mars, který funguje na platformě Zooniverse pro vědecké pomocníky z řad veřejnosti, vás nechá na snímky kreslit hranice kolem terénních objektů a vybírat ze čtyř jejich popisků. Právě tyto popisky jsou klíčem ke zpřesnění klasifikace algoritmů SPOC (Soil Property and Object Classification).
Zdroj: https://www.nasa.gov/
Popisky SPOC vznikly v kalifornské JPL a popisují různé typy terénu, se kterými se vozítko setkalo. Vzniklá mapa pomáhá členům týmu určit, kterou cestu zvolit. Systém SPOC se tedy již používá, ale může se i dále vylepšovat. „K vytrénování algoritmu pomocí deep learning jsou zapotřebí stovky tisíc příkladů,“ říká Hiro Ono, výzkumník umělé inteligence z JPL a dodává: „Třeba algoritmy pro řízení automobilů se trénují na bezpočtu snímků silnic, značek, semaforů, chodců a dalších vozidel. Jiné veřejné databáze pro taková učení obsahují lidi, zvířata či budovy, ale žádný terén z Marsu.“
Až se systém rozjede, bude schopen automaticky rozlišit mezi pevným regolitem, vysokými kameny, rovným kamenným povrchem a nebezpečnými písečnými dunami. „V budoucnu očekáváme, že tyto algoritmy budou dost přesné i na další úkoly – třeba na určení pravděpodobnosti prokluzu kol vozítka na různých površích,“ uvedl Ono.
Zdroj: https://www.nasa.gov/
Plánovači jízd by lépe trénovaný model SPOC ocenili – jsou zodpovědní za každý pohyb vozítka – od focení, přes manipulaci se vzorky až po jízdu z místa na místo. Naplánování jedné jízdy může trvat až pět hodin, přičemž je do toho zapojeno velké množství lidí, kteří píší a kontrolují stovky řádků kódu. Důležitá je i neustálá spolupráce s vědci. Geologové vyhodnocují terén a analyzují, zda nehrozí prokluz kol, či jejich poškození špičatými kameny, případně uvíznutí v písečné duně, což zažily rovery Spirit i Opportunity.
Zdroj: https://www.nasa.gov/
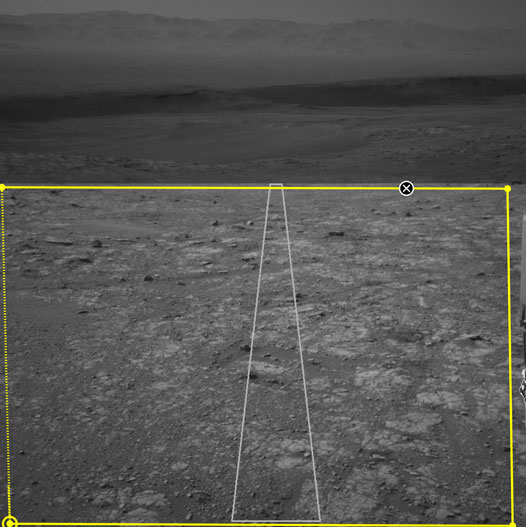
Zohledňovat se musí i vliv stínů na povrchu, který může zmást systém určující ujetou vzdálenost – takzvaný vizuální odometr porovnává snímky povrchových útvarů z kamer. SPOC tento systém kompletně nenahradí, ale umožní, aby se lidé věnovali jiným aspektům jejich práce – třeba debatám s vědci o dalších vědeckých úkolech. „Naším úkolem je zjistit, jak bezpečně získat vědecké informace,“ říká Stephanie Oij, jedna z plánovačů zapojených do iniciativy AI4Mars a dodává: „Automaticky generované popisky terénu nám ušetří čas a budeme také produktivnější.“
Výhody chytřejších algoritmů využije také letos vyvinuté vozítko Perseverance. Nejprve je potřeba vytvořit archiv popsaných snímků. Do systému AI4Mars bylo zatím nahráno více než 8 000 snímků z roveru Curiosity. Ono navíc dodává, že bude možné časem využít i snímky z vozítek Spirit a Opportunity. V současné době, kdy článek vychází, jsou všechny snímky zpracované, takže pokud se budete chtít zapojit, musíte si počkat na novou várku. Nebo zatím trénujte na již zpracovaných snímcích.
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/sites/default/files/thumbnails/image/pia19808-main_tight_crop-monday.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/pia23897-16.jpg





{kind=link}
{kind=link}