Rover Curiosity se na Marsu v posledních měsících potýká s problémy s vrtačkou, které jsme detailně rozebrali v tomto článku. Vozítko tak nemohlo odebírat vzorky a následně je analyzovat, čímž dočasně ztratilo jednu ze svých hlavních výhod. Nyní se však začíná objevovat světlo na konci tunelu. Inženýři totiž zjistili, že chyba nepůjde opravit a proto začínají zkoušet nový systém vrtání, kterým by se dal problém obejít. Musí ale být opatrní, protože s podobným postupem se dříve nepočítalo. Pokud by postupovali zbrkle, mohli by s novou metodou snadno zlomit vrták, což samozřejmě nikdo nechce.

Zdroj: http://planetary.s3.amazonaws.com
Nová technika by tak po prvních zkouškách měla umožnit roveru znovu zahájit vrtání a analýzu odebraných vzorků. Všemu pochopitelně předcházela teoretická i praktická příprava na zemi a nyní je možné přistoupit k další úrovni – přípravě na zkoušku přímo na Marsu. Rover, který už oslavil pět let na Marsu se ale vrtání hned tak nedočká. Kvůli maximální opatrnosti při zavádění nového procesu se dá očekávat, že samotné vrtání přijde v nejlepším případě za několik měsíců. Inženýři i manažeři celé mise jsou ale optimističtí – zkoušky na pozemním dvojčeti roveru totiž podle jejich slov probíhaly velmi dobře.
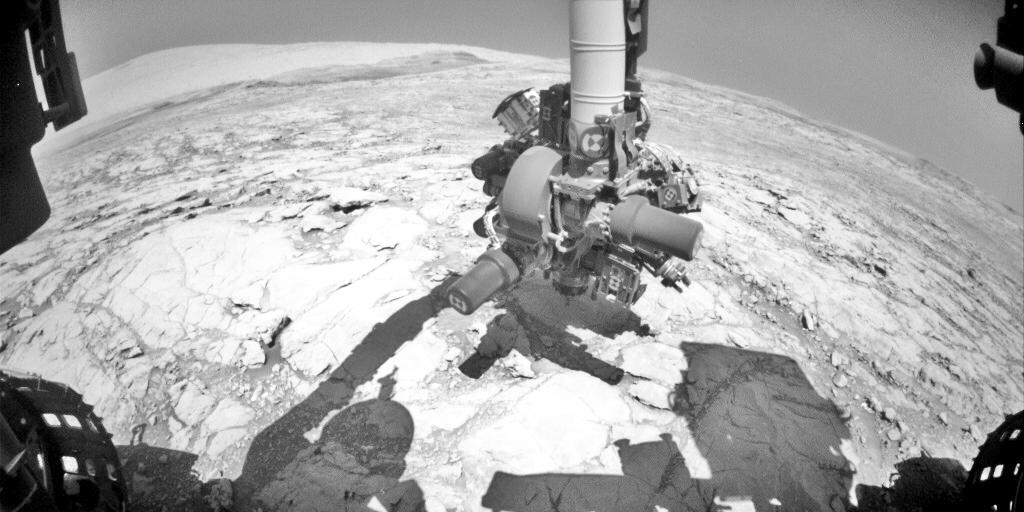
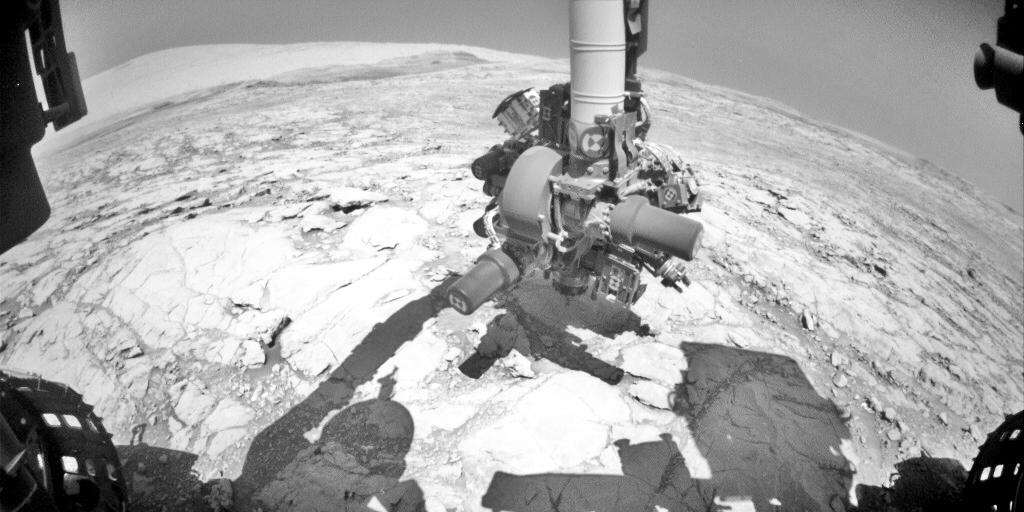
„Snažíme se postupovat opatrně, abychom připravili a otestovali nové způsoby, jak s roverem pracovat. Rover během této doby stále provádí výzkum – používá k němu přístroje, které nejsou závislé na vrtání,“ popisuje zástupce projektového manažera, Steve Lee z Jet Propulsion Laboratory. Sedmnáctého října se vrták na konci robotické paže dotkl povrchu Marsu – bylo to poprvé po deset měsíců dlouhé pauze.
Zdroj: https://photojournal.jpl.nasa.gov/
Robotické rameno zatlačilo vrtákem k povrchu a pak vyvinulo drobnou sílu směrem do strany, přičemž během celého procesu se sbíraly údaje z integrovaných snímačů síly. „Bylo to poprvé, kdy jsme se vrtákem dotkli povrchu bez stabilizátorů,“ vysvětluje Douglas Klein, hlavní inženýr zodpovědný za znovuzprovoznění vrtačky a dodává: „Tato zkouška nám umožní lépe pochopit, jaké informace nám může poskytnout silový senzor a senzor točivého momentu v robotickém rameni.“
Tyto senzory dávají řídícímu počítači představu o silách, které na rameno působí – jak silně tlačí na povrch, nebo jaké jsou boční tlaky. Při vrtání a následném vytahování vrtáku bude potřeba se vyvarovat přílišné boční síle, protože jinak riskujeme mnoho nepříjemných momentů – zlomením vrtáku počínaje a jeho zaseknutím v otvoru konče.

Zdroj: https://photojournal.jpl.nasa.gov
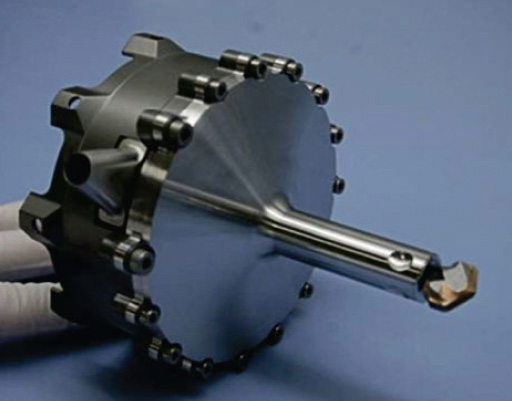
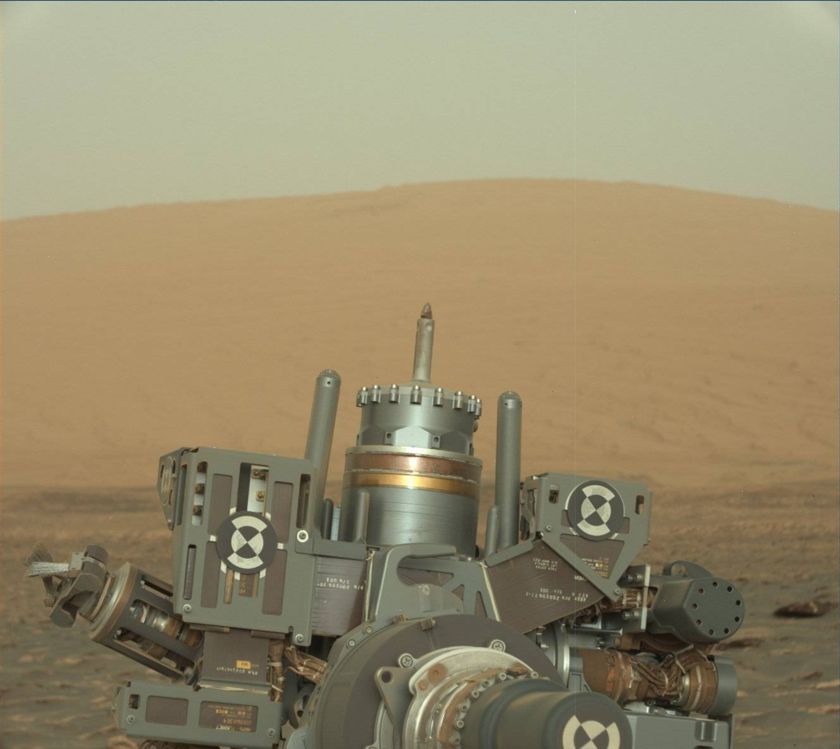
Curiosity zatím mezi roky 2013 a 2016 vrtala na patnácti místech, přičemž vzorky odvrtaného prachu byly doručeny do analyzačních přístrojů v těle roveru. Při všech těchto vrtáních byly k vrtanému kameni přiloženy dva stabilizátory – můžeme si je představit jako dvě tyčky (každá na opačné straně od vrtáku), přičemž vrták byl v zatažené poloze. Následně motorizovaný mechanismus (drill feed) vysunul vrták vpřed, načež se kombinací otáčení a příklepu začal zahryzávat do zkoumaného kamene.
Drill feed mechanism však v prosinci loňského roku potkal problém, načež systém přestal pracovat. Pozemní týmy se nejprve snažily obnovit jeho funkci, ale později převládl názor, že nejlepší bude vyvinout alternativní metodu vrtání bez využití drill feed mechanism. Výsledkem je metoda, při které se použije pohyblivost robotické paže, která bude přímo ovládat pozici a orientaci vrtáku. „Nahradíme jednu osu pohybu, kterou poskytovat drill feed mechanism, za robotické rameno, které má pět stupňů volnosti,“ vysvětluje Douglas Klein a dodává: „Není to snadné, ale máme štěstí, že v rameni jsou senzory síly a točivého momentu.“
Hlavním úkolem těchto senzorů bylo až doposud sledování silové zátěže ramene – pokud by hodnota této zátěže překročila kritickou hodnotu, rameno by zastavilo pohyb a čekalo by na pokyny ze Země. Nová metoda vrtání označovaná jako „feed-extended“ tyto senzory využije k eliminaci nepříznivých bočních sil. Současná zkouška pomůže inženýrům určit, jak by se data ze senzorů dala co nejefektivněji využít.

Zdroj: https://photojournal.jpl.nasa.gov/
Ještě než se začalo zkoušet na Marsu, byla tato metoda vyzkoušena na téměř identickém dvojčeti roveru Curiosity, který na testovacím stanovišti zkoušel novým způsobem vrtat do několika pozemských kamenů. Operátoři přitom mohli vyzkoušet i další úkoly – vyvinuli například metody, jak dopravit odvrtaný materiál do násypek pro analytické přístroje v těle roveru aniž by museli použit problematický drill feed mechanism. Ani vývoj nového postupu nebyl jednoduchý, protože dříve bylo k přesunu vzorků potřeba, aby byl vrták v zasunuté poloze.
„Dosavadní vývoj a zkoušky tady v JPL vypadají nadějně,“ raduje se Steve Lee a dodává: „Teď se musíme podívat na senzory na Marsu. Udělali jsme významný pokrok v přípravě nové metody vrtání, ale stále v některých oblastech panuje nejistota, což může zkomplikovat naše snahy o obnovení vrtání. Ale jsme optimističtí“.
Vozítko se momentálně nachází v lokalitě Vera Rubin Ridge ve spodní části hory Mount Sharp a blíží se k vrcholu hřbetu, jehož výška odpovídá zhruba 20 patrům. Rover zde studoval rozložení minerálu hematitu, který tvoří železo a kyslík. Právě tento horniny s obsahem hematitu tvoří tento hřbet, který je odolný vůči erozi.
Zdroje informací:
https://www.jpl.nasa.gov/
Zdroje obrázků:
http://spaceref.com/news/Drill_bit_525.jpg
http://planetary.s3.amazonaws.com/…1780ML0091950000702009E01_DXXX_f840.jpg
https://photojournal.jpl.nasa.gov/jpeg/PIA22063.jpg
https://photojournal.jpl.nasa.gov/jpeg/PIA22061.jpg
https://photojournal.jpl.nasa.gov/jpeg/PIA22062.jpg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Máme zase čomu držať palce !
Moc hezky a podrobně napsané. Jen doplním, že drill feed není nic jiného než starý dobrý přísuv.
hezké povídání o tom vrtáku a taky o celé té mašině: https://youtu.be/Qa2sc6-u59I?t=285