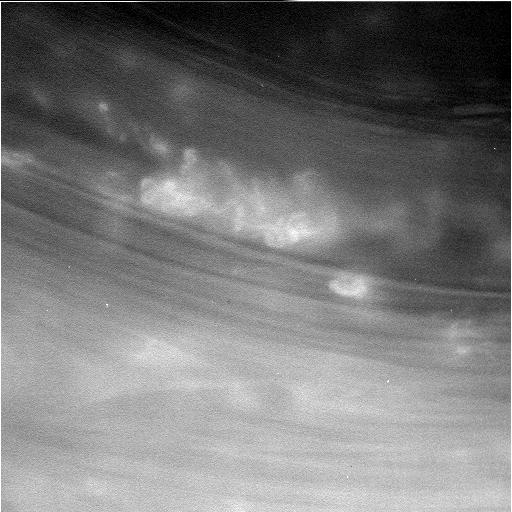
Americká sonda Cassini si ve středu 26. dubna připsala úctyhodné prvenství – jako první lidmi vyrobený objekt prolétla skrz mezeru mezi planetou Saturn a vnitřním okrajem jejích prstenců. Na fotky z tohoto průletu jsme si museli počkat až do čtvrtka, kdy je sonda začala průměrnou rychlostí 64 kb/s odesílat. Signál letěl kosmickou prázdnotou rychlostí světla zhruba 74 minut a pozemní operátoři se tak mohli dočkat prvních fotek z dosud neprozkoumaného prostoru mezi obří planetou a jejími prstenci. NASA proto v zájmu rychlého šíření informací uvolnila na internet i nezpracované snímky.
Zdroj: https://www.nasa.gov/
Cassini se kolem Saturnu prosmýkla ve vzdálenosti 3 000 kilometrů od pomyslné vrstvy v mracích, kde je tlak 1 bar, tedy srovnatelný s tlakem vzduchu na Zemi na hladině moře. Zároveň prolétala zhruba 300 kilometrů od nejvnitřnějšího viditelného okraje prstenců. Mezi specialisty pochopitelně panovaly obavy, jak průlet dopadne a zda jej sonda vůbec přežije.
Při historicky prvním průletu proto byli extra opatrní a hlavně zvědaví. „Ještě žádná sonda se nedostala takhle blízko k Saturnu. Zatím jsme se mohli spoléhat jen na naše odhady založené na dosavadních zkušenostech s jinými oblastmi prstenců. Z toho jsme pak odvozovali, jak by mohla mezera mezi planetou a prstenci vypadat,“ vysvětluje Earl Maze, projektový manažer mise Cassini z americké Jet Propulsion Laboratory se sídlem v kalifornské Pasadeně a dodává: „Jsem opravdu rád, že mohu oznámit, že sonda prolétla mezerou přesně tak, jak jsme plánovali a na druhé straně planety se objevila ve skvělém stavu.“
Zdroj: https://saturnraw.jpl.nasa.gov
Zdroj: https://www.nasa.gov
Mezera mezi vnitřním okrajem prstence a nejsvrchnější vrstvou Saturnových mračen je široká asi 2000 kilometrů. Nejlepší dosavadní modely pro tuto oblast předpokládaly, že v této oblasti, především pak v rovině prstenců, přes kterou Cassini prolétala, budou rozptýlené drobné částice. Bavíme se o skutečných drobečcích, jejichž velikost se přibližuje částicím obsaženým v cigaretovém kouři. Jenže Cassini se touhle oblastí prohnala stěží představitelnou rychlostí 124 000 km/h vůči Saturnu. Takže i částice, které jsou jen o něco hmotnější, než nic, by při takové rychlosti dokázaly zničit citlivé přístrojové vybavení sondy.
Sonda proto jako improvizovaný štít použila svou talířovitou anténu o průměru 4 metry. Stačilo, aby se sonda otočila tak, že anténa mířila směrem, odkud se očekával přílet drobných částic. Kvůli tomu nebylo možné během průletu komunikovat se Zemí. Cassini ale s dostatečným předstihem dostala podrobné instrukce, jak se má během průletu chovat a jak má docházet ke sběru vědeckých údajů. Součástí pokynů byl i příkaz, aby se sonda zhruba 20 hodin po průletu otočila anténou směrem k Zemi a začala s ní komunikovat.
Zdroj: https://www.nasa.gov
Vědci nyní budou pilně vyhodnocovat údaje nasbírané při historicky prvním průletu mezi Saturnem a vnitřním okrajem prstenců. Další blízký průlet je přitom plánován už na 2. května, což znamená, že bychom se mohli průletu dočkat zhruba jednou za týden. Celkem nás čeká 22 blízkých průletů, které jsou součástí závěrečné fáze označované též jako Grande finale.
Data nasbíraná při prvním průletu pomůže inženýrům lépe pochopit, jak a zda vůbec by měli sondu chránit při budoucích průletech. Sami odborníci se netají tím, že pro ně momentálně začíná úplně nová mise, ze které budou chtít získat maximum údajů, než se Cassini 15. září letošního roku naposledy ozve na zemi, načež shoří v atmosféře planety. Skončí tak jedinečná mise, která se však bohužel v dalších letech zřejmě nedočká žádného nástupce.
Na závěr ještě připojíme video vytvořené ze 116 surových snímků, které dorazily na zemi hned první den.
Zdroje informací:
https://www.nasa.gov/
https://spaceflightnow.com/
Zdroje obrázků:
https://saturn.jpl.nasa.gov/system/resources/detail_files/7642_CGF_STILL_00022_1600.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/main_w00106360.jpg
https://saturnraw.jpl.nasa.gov/multimedia/images/raw/casJPGFullS99/W00106928.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/w00106373.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/w00106380.jpg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Neskutečné. Dokonce bych řekl, že takovéto ještě nezpracované záběry jsou někdy svým způsobem působivější než ty upravené.
Minule jsem ten odhad rychlosti tedy trochu přehnal (50 km/s a více). Je to o 16 méně. A jak je to s tou šířkou mezery mezi oblaky a prstenci? V článku stojí, že sonda prolétla 3000 km od oblaků a 300 km od okraje prstenců, ale dále je uvedeno, že mezera je široká 2000 km. Ale možná je těch 3000 km vztaženo ne nutně k horní vrstvě, ale k té, kde je tlak 1 bar, jak je také zmíněno?
Taky jsem z toho byl zmatený. Michal Václavík mi ale vysvětlil, že ten první údaj se nevztahuje k horní vrstvě oblačnosti, ale té pomyslné oblasti, kde je tlak srovnatelný s tlakem vzduchu na hladině moře.
Díky za vysvětlení. Vzdálenost od horních vrstev oblačnosti byla tedy méně než 2000 km. Schválně jsem to spočítal – pokud by měl Saturn průměr 1 metr, tak zcela neviditelná Cassini by ho minula o 14 milimetrů, což je v podstatě i šířka mezery mezi prstenci a Saturnem, kam se Cassini musí 22 krát trefit…. Z takové přesnosti navedení se člověku až zatočí hlava.
Snímky jsou vážně skvělé! Jen by mě zajímalo, proč vlastně nejsou barevné? Je to z důvodu nějakého technického omezení?
Černobílé snímky se v kosmonautice používají hned z několika důvodů – jednak vědci k výzkumu barvy jako takové nepotřebují, dále se u čb snímků dají použít nejrůznější filtry, které se umísťují před aparát a třetím důvodem je to, že v čb režimu má výsledná fotka menší datový objem, což se hodí při odesílání na Zemi.
Menší datový objem bych moc nevyzdvihoval, neb ty „ČB“ snímky mají větší bitovou hloubku (u Cassiny jsem dohledal 12 bit), takže ve finále (když se použijí tři filtry) bude těch dat více, než z „našich“ foťáků (3×8 bit). Další věc je, že z 12 bit mají vědci 4096 „odstínů“ oproti 256 u 8bit.
Jenom hnidopišská technická poznámka – nevím jak z vašich, ale z mých foťáků leze 12 a 14 bitů na pixel. Koneckonců i z pitomého mobilu typu Nexus 5 se nechá se správným softwarem vytáhnout desetibitový RAW… 🙂
Johanka: Ale on píše, že z jeho foťáku leze dokonce 3×8, tedy 24 bitů na pixel. Pro každou barevnou složku má 8 bitů. Takže má asi ještě „lepší“ foťák než vy a nebo samozřejmě než ten Nexus.
re: maro
navážu na OT a podotknu, že klasické zrcadlovky (a jiné foťáky) mají před pixelama barevnou masku, takže 20 megapixelů přístroj má „FYZICKY“ cca 5 milionů červených, 5 milionů modrých a 10 milionů zelených pixelů z nichž každý dokáže do RAW souboru ideálně zapsat 14bit hloubku (těch 14bit je údaj o A/D převodníku, jak se s tím daný procesor a software přístroje popere je věc druhá)
Hmm,
v podstatě žádný snímač nevidí barvy. Ani ten ve foťáku… Snímač vidí jen úrovně jasu (přesněji úrovně náboje, které vyvová dopad fotonů na snímací buňky). Barvy se získají různým způsobem. Matematicky, dopočítáním, nebo barenými filtry před buňkami snímače.
Jenže to si běžný uživatel foťáku ani neuvědomuje.
A ani v dobách chemicky zpracovávaných filmů to nebylo jinak-film měl 3 vrstvy citlivé na 3 základní barvy (tj. zaznamenával úrovně jasu pro 3 základní barvy)
To vaše „matematické dopočítání“ na barvy opravdu nefunguje. Bez barevných filtrů neuděláte nic. Bez filtru ta CCD buňka prostě „naměří“ množství světelné energie na ni dopadlé během expozice, přičemž se „započítává“ energie všech vlnových délek, tedy všech možných barev. Výsledkem je jedna hodnota, ze které už barvy nijak nedostanete. K získání barvy potřebujete už při expozici použít barevný filtr, který k snímači pustí jen omezený rozsah vlnových délek, odpovídající rozsahu vlnových délek, na které reaguje čípek jedné ze tří základních barev v lidském oku. A až ze tří hodnot pro ty tři typy čípků v lidském oku získáte data pro barvu.
Takže z toho co přišlo z Cassini jako 4096 úrovní energie (úrovní šedi) barevný obraz, tak jak by ho u Saturnu vidělo lidské oko, nikdy nedopočítáte.
2maro: pravdu máte částečně oba, většina současných fotoaparátů totiž snímá jen jednu barvu na pixel a výsledná „skutečná“ barva vzniká až interpolací mezi sousedními pixely. Viz třeba zde: https://cs.wikipedia.org/wiki/Bayerova_maska
Výjimkou jsou snad jen fotoaparáty Sigmy se snímači Foveon, které opravdu snímají pro každý pixel tři barvy (snímací vrstvy jsou v tomto případě umístěny nad sebou).
Johanka: Zapomeňte na nějakou interpolaci pro získání barvy. Ten jeden pixel je realizován čtyřmi snímacími „čtverečky“ s různými barevnými filtry. Jeden má červený filtr, jeden modrý filtr a dva mají zelený filtr (zelená barva není tak „průrazná“ a proto dvojnásobná plocha, než u ostatních dvou). Data z těchto čtyř snímačů už jsou přímo daty RGB pro jeden pixel výsledného obrázku. Bez těch různých filtrů na těch čtyřech čtverečcích můžete na barevný obraz zapomenout. Ty tři barevné hodnoty jdou celou cestu od expozice až do RGB hodnoty (tři čísla) pro pixel pořád nezávisle vedle sebe a tak se dostanou až do monitoru, kde zase vedle sebe rozsvítí blok barevných LCD elementů, umístěných na společné pixelové souřadnici odpovídající tomu pixelu na snímači. Nikdy se do sebe nezamíchají. Takže pro rozsvícení obrázku žádnou interpolaci nepotřebujeme. Ovšem kvůli tomu, že každý (například modrý) barevný snímač je posunut vůči středu celého pixelu, vypočítá se „modrá hodnota“ interpolací z „modrého čtverečku“ daného pixelu (ten má největší váhu) a dalších tří nejbližších „modrých čtverečků“, abychom získali věrnější obraz bez sice minimálního, ale přece jen trochu viditelného posunu (o maximálně čtvrt šířky pixelu) barev.
Tedy pro zobrazení barevného obrázku není interpolace vůbec „životně“ důležitá. Funguje to i bez ní. Ovšem „životně“ důležité jsou ty tři nezávislé RGB hodnoty pro jeden pixel. Pokud snímač ty snímací „čtverečky“ s barevnými filtry nemá, poskytuje pro pixel jen jednu hodnotu, nemůže nikdy tu barvu rekonstruovat.
Ten snímač Foveon je hezký a i z něj lezou tři nezávislá čísla pro tři barvy daného pixelu. „Vycentrovaná“ a tedy opravdu bez potřeby zpřesňující interpolace na úrovni jednotlivých barevných složek.
A vzhledem k tomu, že se na ty fotky díváme na LCD displejích, které z principu taky nemají všechny tři barevné podelementy na sobě, ale vedle sebe, musí LCD displej správně udělat další interpolaci jednotlivých barevných složek přesně podle toho jak je právě on konstruován.
Pokud by měl CCD snímač úplně stejnou organizaci barevných podelementů jako LCD displej (třeba jen tři svislé pruhy ve stejném pořadí barev), byla by jakákoliv interpolace naopak zcela kontraproduktivní a nejlepšího výsledku bysme dosáhli jejím kompletním vynecháním jak při snímání tak samozřejmě při zobrazování.
Evidentně jste ten odkaz nepochopil. Ve fotoaparátech s bayerovou maskou, což je v současnosti drtivá většina, dostáváte z každého pixelu jen jednu hodnotu. Pokud máte řekněme šestnáctimegapixelový fotoaparát, vypadně vám z něj šestnáct milionů osmi (či více) bitových hodnot. V případě RGB byste jich měl třikrát víc.
Jestli vám pro pochopení nestačil předchozí odkaz, můžete to zkusit tady:
http://www.fotofocus.cz/cz_digitalni-snimace-jak-na-barvy-%285.-dil%29,248.html
Koneckonců podívejte se pořádně na uspořádání bayerovy masky, pokud byste to snímal v RGB, neměl byste tam ten jeden zelený pixel navíc.
PS: raději explicitně upozorňuji na tuto větu v článku:
Prakticky je tak u Bayerovy masky – v případě 18 MPix fotoaparátu – 9 MPix citlivých na zelenou barvu, 4,5 MPix citlivých na červenou barvu a 4,5 MPix citlivých na modrou.
Johanka: Samozřejmě jako jeden pixel beru ten jeden zobrazovaný bodík v počítači a tedy to co má jako atribut tři barevné složky. Takhle to bere samozřejmě zrovna tak zobrazovací aplikace v počítači i hardware v monitoru. Pixelem rozhodně není ten jeden ze čtyř elementíků co snímá jednu barvu. Pokud výrobce fotoaparátů používá nesmyslnou terminologii, aby měl v reklamě větší číslo a tedy se to líp prodávalo, je to sice hezké, ale jen pro něj. Nesmyslná definice, jejíž platnost začíná i končí uvnitř toho zařízení a z něj už lezou obrázky, kde se používá normální definice pixelu tak jak jsem vám ji popsal.
V každém případě ať už si pixelem ve foťáku pojmenujete co chcete, interpolaci tak ani tak nutně nepotřebujete.
Pokud začnete přemýšlet v těch normálních „počítačových“ pixelech, bude pro vás normální i ta Bayerova maska. Jeden pixel se prostě skládá ze čtyř čtverečků, jednoho modrého, jednoho červeného a dvou zelených (jedině zde se hodnota sečte a vynásobí upravující konstantou).
Nechci se zapojovat konkrétně do téhle debaty, protože to není můj obor, jen si dovolím připomenout, že včera jste měl na začátku diskuse nesprávné informace o sestřelu americké družice a postupně jste s novými důkazy uznal, že jste se mýlil. Nebylo by vhodné se ještě jednou zamyslet nad tím, co tu Johanka píše? Mám pocit, že jste občas se vším moc rychle hotový, ale nemyslím to zle. 😉
Vzdávám to. Nemá to cenu.
Johanka: Asi už rozumím, co jste chtěla říct. Popisujete standardní převod z foťákového raw formátu do RGB v počítači:
„When a Camera Raw file is converted to a standard RGB image, each pixel has to read data from its neighbours to calculate the full RGB set of three colour values. For example, a Raw Red pixel has only the Red value in it, so it has to interpolate the Green and Blue values from the surrounding Raw pixels that have Green and Blue values. “
Ale to je prostě jen jeden přímočarý algoritmus.
Jiný algoritmus, který přitom taky neztrácí data, udělá z té jedné čtveřice jen jeden pixel (místo čtyř, které dělá ten standardní). A ta data neztrácí proto, že jich tam ani předtím víc nebylo: z té čtveřice je stejně jen jedna hodnota pro modrou a jen jedna hodnota pro červenou. Tedy jedině u té zelené se trochu informace ztratí, pravda. Ale není tam zase nic „domyšleného“ jako u toho standardního.
Jistě, váš algoritmus data neztrácí – snad kromě tří čtvrtin informací o jasu, za což nedostane ani bit informace o barvě navíc. Opravdu zvláštní, že podobný způsob demozaikování ještě běžné RAW editory nezačaly používat… 🙂
Fakt nevidím důvod, proč v diskusi pokračovat. Pokud chcete znovu vymýšlet kolo, poslužte si…
Dušan Majer: Vlastně jde stále jen o tu druhou nesmyslnou větu od q:
„…Barvy se získají různým způsobem. Matematicky, dopočítáním, nebo barenými filtry před buňkami snímače.“
V té větě je špatně to slovo „nebo“, protože ty barevné filtry před buňkami snímače tam musí prostě musí být. Bez nich z toho standardního CCD čipu ty barvy prostě nedopočítáte.
Johanka: Tento způsob je logický v případě, že vám jde o množství dat. Ten standardní sice přidá jednu třetinu informace navíc, díky tomu druhému zelenému elementu, ale současně čtyřikrát „nafoukne“ množství dat pro obrázek, když tři ze čtyř červených, tři ze čtyř modrých a dvě ze čtyř zelených hodnot jsou jen vypočítaným průměrem okolních hodnot.
Ideál by byl, kdyby se tím vaším kolem řídili i výrobci zobrazovačů a tedy tu Bayerovu masku realizovaly i LCD zobrazovače stejným rozložením barevných elementů. Ty to mají ale evidentně na háku a používají svoje vlastní kola:
https://www.cambridge.org/core/journals/apsipa-transactions-on-signal-and-information-processing/article/increasing-image-resolution-on-portable-displays-by-subpixel-rendering-a-systematic-overview/138F300781FBA7050B8D041BEF0CE8C5/core-reader
Mimochodem to „moje kolo“ se tu samozřejmě používalo jmenovalo se to „linear pattern“:
http://image-sensors-world.blogspot.cz/2010/12/sony-cinealta-moves-beyond-bayer.html
Ale nakonec se to stejně většinou hned převede do úplně jinak organizovaného velice úsporného jpegu, takže to zas tak moc lidí netrápí.
Ach jo. Co kdybyste si ty odkazy alespoň přečetl? První se týká subpixelového vyhlazování fontů na LCD panelech (totálně mimo téma) a ani druhý nemá s bayerovou maskou nic společného, jde o sedm let starý návrh liear RGB snímače pro 4K kamery a ať jsem hledala jak jsem hledala, nikde jsem nenašla že by se to vůbec někdy dostalo do produkčního stavu.
Zbytek nemá cenu komentovat.
Johanka: Ta podstatná je snad hned ta třetí věta jako popiska k prvnímu obrázku druhého odkazu, kterou z nějakého důvodu ignorujete:
„The previous generation of Sony CineAlta CCD-based Super 35mm cameras used linear RGB pattern:“
Tedy překlad: „Předchozí generace Super 35 mm kamer Sony CineAlta s CCD snímačem používala ‚linear RGB pattern‘ „, tedy to co je namalováno vlevo na prvním obrázku. Žádná Bayerova maska, žádná interpolace, tedy to „moje kolo“.
Budu, s dovolením, věřit víc tomu serveru, zabývajícímu se CCD senzory, než vám.
Možná jste to nepostřehl, ale moje poznámka o vymýšlení kola se týkala demozaikování dat z Bayera (a opakovaně jsem to zdůrazňovala), ne exotických snímačů pro speciální videokamery. Celou dobu explilicitně píšu o mainstreamových snímačích pro digitální fotoaparáty, což je Bayer, takže se nepokoušejte přehrát svoji neznalost na okrajovou raritu, která má ostatně také svoje mouchy.
Johanka: Prosím, prosím. Držme se tématu. Já nejsem žádnej specialista na CCD snímače. Pořád od začátku jen obhajuju tyto dvě věci:
1. Bez barevných filtrů na jednotlivých barevných snímacích elementech se barvy nedají dopočítat i kdyby se počítač rozkrájel.
2. Nějaká interpolace není povinnost nutná k „vykouzlení barev“ ze CCD snímače a tedy pro snímání barevného obrazu není nutná ani u profesionálních kamer, které prostě používají svou organizaci snímacích elementů. Tady se to zrovna jmenuje „linear RGB pattern“.
Toť vše.
P.S. A ta interpolace není nutná povinnost ani u toho vašeho Bayera, když se prostě z těch dat ze snímače vezme ta čtveřice hodnot RGBG jako základ pro jeden pixel a vůbec se nekouká na okolní hodnoty. Ta čtveřice hodnot jako data pro jeden pixel má stejný význam jako ta trojice hodnot pro jeden pixel z toho Linear RGB patternu. A pořád mluvím o těch „velkých“ počítačových pixelech.
Zkuste si se vrátit k mému prvnímu příspěvku a pozorně si ho přečtete. Já jdu spát.
Zatím asi dorazil první „filtr“. Až budou mít všechny tři, poskládají „barevný“ obraz.
Pro zajímavost. Krátkofokální kamera má 18 filtrů, dlouhofokální 24 filtrů. Oba pro oblast 380-1100 nm). „Berevné fotografie“ v kosmonautice tak mnohokrát neodpovídají našemu barevnému vjemu a tedy „skutečnosti“.
Tak pokud je filtrů víc a je možné je rozdělit do skupin, kde každá skupina pokrývá rozsah jedné základní barvy lidského oka, tak se z toho snad dá v tomhle případě ten „lidsky“ barevný obraz složit. Máme prostě víc detailnějších informací
Krásné promo video o Final Mission of Cassini.
https://www.youtube.com/watch?v=l5Jc6jXgc3U
Dodatek: vesmir neni tak barevne tak jak se zda. Dokonce barvy nehraje tak dulezity roli. Je dulezite jaky info muzeme ziskat z teh cernobyli obrazky
Ps: muzeme ziskat chemicky slozeny podle spektrum. A to neni tak dulezity u saturnu kdyz uz davno vime
tiez cakam, v ktorom storoci zacnu davat na sondy normalne snimace a nie tieto detske hracky..
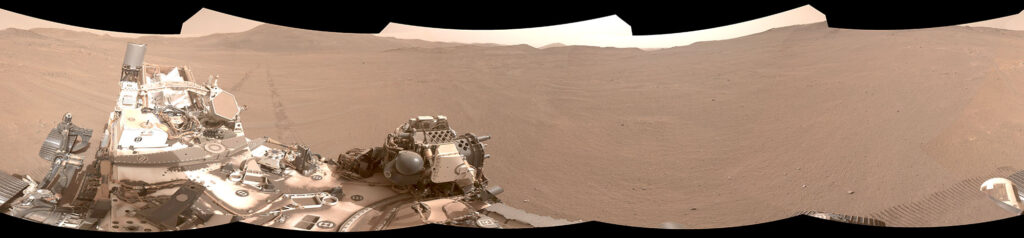
On je celý problém značně komplexnější, než aby se dal takto jednoznačně a trochu i pohrdavě shrnout. Nejprve si zkuste odpovědět, proč tam ty sondy létají – aby sbíraly vědecké údaje, nebo aby měli lidé na internetu co obhlížet? Vědcům plně stačí současný stav, tedy černobílá kamera s filtry. Barevné kamery jsou fajn, ale není to v žádném případě nutnost. Čest výjimkám jako jsou třeba rovery na Marsu – tam je barevná kamera potřeba – ale třeba na Curiosity je kamer hned několik a barevné jsou jen některé – jen ty, u kterých to má smysl. Obecně vzato můžeme říct, že u kosmické kamery nehraje barevnost roli. Hlavní je velikost snímače.
A ještě drobnost – sonda Cassini vyrazila na cestu vesmírem v roce 1997! Předtím se několik let stavěla a plánovala. Berte to, prosím, v úvahu předtím, než napíšete nějaký kousavý komentář, děkuji. Na kosmickou techniku se dává to nejlepší, co je k dispozici v době návrhu.
Ďakujem za vyčerpávajúce vysvetlenie.
Rádo se stalo. 😉
Přesně tak…
Hlavne Curiosity a spol. muze vysilat na Zem data pres nejakou z druzic ktera lita kolem planety, ta urcite bude mit vybaveni pro mnohem vetsi datovy tok. Vubec vetsi technicka neznama je jakym zpusobem ziskavali a odesilali fotky stare sondy typu voyager atd.
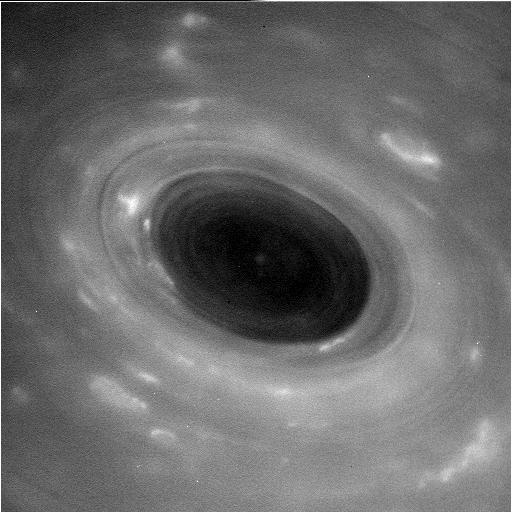
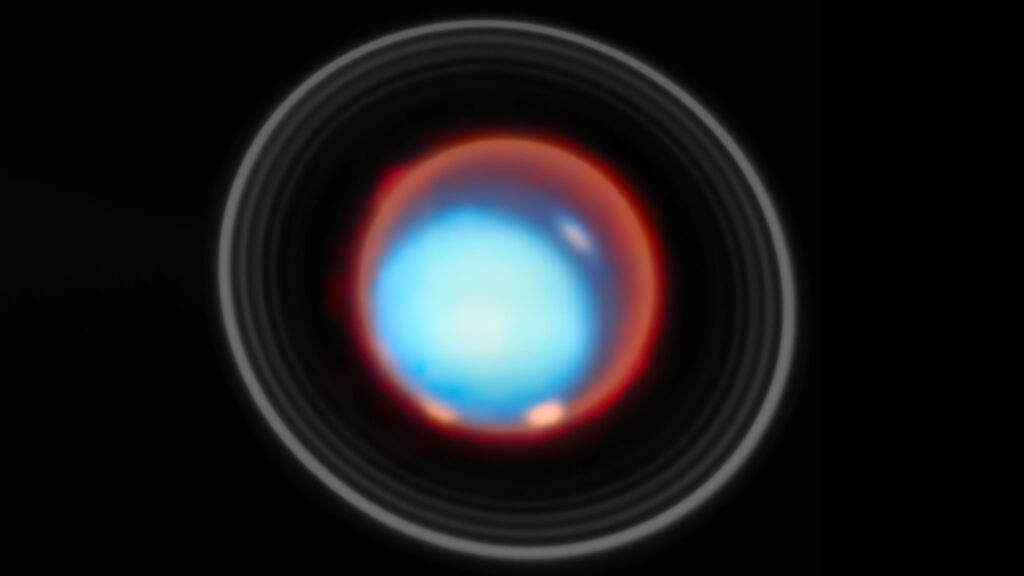
Ten hexagon nepochopim
Je to šílený úvar, ale podařilo se ho nasimulovat a snad tedy odhalit původ.
http://www.observatory.cz/news/zahada-sestiuhelniku-na-saturnu.html
Inak, ten druhý obrázok s popisom:“Zřejmě vír v atmosféře Saturnu“. Nieje to náhodou ten vír v strede toho hexagonálneho útvartu? Teda mne sa zdá, že je to ono.
Možná to je jeho součástí, jen zatím neznáme přesnou lokaci této oblasti. Ale i hexagon je součástí atmosféry. 😉