
Měkké přistání autonomně (samostatně) řízené kosmické sondy nebo rakety je velmi náročný úkol, přičemž přistání s vysokou přesností, blízko předem vybraného cíle, je celkem pochopitelně ještě náročnější úloha. Přesné přistání je ovšem cestou ke zvýšení kvality průzkumu sluneční soustavy a také k umožnění stavby nosných raket, které mohou být znovu natankovány a opakovaně použity, podobně jako třeba dopravní letadla. Proto je tomuto tématu věnována zvýšená pozornost a zabývají se jím špičkové inženýrské týmy raketokosmického průmyslu.
Tento článek Vám nabídne přehled některých překážek přesného přistávání, zmíníme nedávné pokusy, které umožnily přesné přistání komerčních znovupoužitelných raket na Zemi a načrtneme, co je potřeba k dosažení podobných úspěchů na jiných nebeských tělesech, například Marsu.
Stručná historie robotického přistávání v kosmonautice
V uplynulých padesáti letech dokázaly autonomně řízené stroje bezpečně navrátit lidské posádky zpět z kosmu, přistát s robotickými vozítky na povrchu Marsu, bezpečně dopravit vědeckou sondu na Saturnův měsíc Titan, zvládly přistát na asteroidu a podobně. Díky těmto misím dnes například víme, že na povrchu Marsu bylo v minulosti mnohem tepleji, bylo zde velké množství kapalné vody, což bylo pravděpodobně velmi příznivé prostředí podporující život. Víme, že na Titanu jsou v současnosti jezera tvořena organickými sloučeninami (kapalný metan), atd.

Zdroj: http://web.mit.edu/
Postupné zlepšování schopností kosmických dopravních prostředků umožnilo přistávat se stále těžšími náklady a na čím dál exotičtější místa, přičemž nedávná zdokonalení, jako například technologie pokročilých decelerátorů, umožní další expanzi průzkumu do nových lokalit našeho solárního systému. Ačkoliv tyto vědecké mise měly vždy namířeno na konkrétní místo ve vybrané přistávací oblasti cílové planety, vypočtená přesnost přistání v minulých desetiletích nebyla vždy stejná. Přesnost přistání se většinou vyjadřuje pomocí velikosti přistávací elipsy, což je oblast, do které robotická sonda přistane s pravděpodobností 99%. Před startem mise musí plánovači vybrat takovou lokalitu pro přistání, aby všechna místa uvnitř přistávací elipsy dovolovala bezpečné dosednutí kosmického plavidla na povrch.
Přiložený obrázek ukazuje, jak se velikosti přistávací elipsy amerických sond Marsu postupně zmenšovaly – zvyšovala se přesnost jejich přistání. Stále se ale jedná o rozměry elips řádově v kilometrech a ne v metrech.
Potřeba vyšší přesnosti
Pokud je přesnost přistání měřena v kilometrech, mise musí přistávat v rovinatých pustinách (v případě Marsu), nebo v oceánech či na rozlehlých planinách (na Zemi). Pokud ale dokážeme přesnost přistání měřit v metrech místo v kilometrech, otevře se nám svět mnoha nových možností. Budeme pak například schopni :
- Prozkoumat jeskyně a hluboká údolí Marsu
- Doručit vzorky hornin z jiných planet na Zemi
- Vybudovat trvalé základny na jiných tělesech Sluneční soustavy
- Vyrábět kosmické nosiče, které po vynesení nákladu na orbitální dráhu přistanou, budou znovu natankovány a opakovaně použity jako dopravní letadla, čímž umožní výrazné snížení ceny cestování do kosmu
Překážky
Při snaze o úspěšné a přesné přistání na planetě či měsíci s atmosférou existuje několik výrazných překážek, se kterými musíme počítat a dokázat je překonat.
Extrémní prostředí
Kosmická sonda či loď bude při vstupu do atmosféry vždy vystavena extrémním podmínkám.
- Naprostá většina kinetické energie tělesa přilétajícího z kosmu, bude vytracena díky tření o atmosféru, což způsobí jeho extrémní ohřev, kterého je nutno se zbavit. Například náběžná hrana tepelného štítu lodi Apollo dosahovala při návratu teplot kolem 2500°C.
- Aerodynamický odpor vytváří enormní síly, působící na klesající těleso. Například první stupeň Falconu 9 Reusable (F9R) má hmotnost cca 35 tun a při nejvyšším zpomalení při návratu do atmosféry na něj působí přetížení 6g.
- Působení větru na návratové těleso. Výškové větry v atmosféře Země běžně dosahují rychlostí 160 km/h a více.
- Výpadek komunikace během části, nebo celého průletu atmosférou. Vysoce zahřáté ionizované plyny kolem kosmické lodi/sondy interferují s radiovým vysíláním a znemožňují obousměrné spojení. Například při návratu velitelské kabiny Apollo 13 trval výpadek spojení 6 minut.
- Kosmická sonda operující mimo oběžnou dráhu Země, je vystavena zvýšené radiaci. Toto platí zejména pro sondy v okolí Jupiteru, kde je radiační prostředí velmi intenzivní.
Malá rezerva pro chyby
U drtivé většiny misí musí být úspěšný už první pokus o přistání, jinak je kosmické těleso zničeno při dopadu. Rezervní množství paliva pro výrazné opravy trajektorie nebo druhý pokus o přistání ve většině případů není k dispozici. Pro velké raketové motory je také technicky obtížné a neefektivní snižovat jejich tah natolik, aby to umožnilo volné vznášení (visení). Každá sekunda visení znamená plýtvání palivem.
Při přistání F9R musí být nulová rychlost klesání dosažena přesně v nulové výšce. Pokud by zbrždění na nulovou rychlost mělo nastat příliš nízko, havaroval by. Pokud by zbrzdil na nulu příliš vysoko, začal by znovu stoupat a jediným výsledkem by bylo vyčerpání paliva a nebržděný volný pád zakončený tvrdým dopadem. V této fázi letu je absolutně nezbytné velmi přesně znát okamžitou výšku a rychlost.
Dosednutí
Pro zmírnění namáhání, kterému je vystavena raketa či sonda během dosednutí, je většinou do konstrukce přidán jednoúčelový systém, jako například přistávací nohy s amortizátory, který ochrání hlavní části konstrukce před poškozením od nerovností terénu, nebo převrhnutím po přistání.

Zdroj: http://www.space.com/
Dokázat zkonstruovat přistávací nohy co nejvíce hmotnostně a objemově úsporné je výzvou, stejně tak jako „doručit“ raketu, či sondu na místo dosednutí ve svislé a neměnné pozici tak, aby
nohy nebyly přetíženy mimo své konstrukční limity.
U vozítka MSL Curiosity umožnil přistávací systém SkyCrane dvojí využití kolového podvozku, který při přistání plnil také funkci pružného prvku, zmírňujícího zatížení konstrukce vozítka při dosednutí.
Dodejme, že okolní podmínky při dosednutí mohou být také poměrně nebezpečné. U dvou sond MER (vozítka Spirit a Opportunity) znamenaly velké ostré kameny v kombinaci s přízemním větrem velké riziko protržení přistávacích airbagů a proto byl do systému na poslední chvíli přidán dodatečný SW pro zpracování obrazu a tři řízeně odpalované retrorakety, které měly před dosednutím snížit horizontální složku pohybu na minimum.
Potřeba trefit se na cíl
Dosažení přesného přistání vyžaduje od kosmického plavidla trefit se na předem vybraný cíl i při působení nežádoucích rušivých vlivů, jako například výškový nebo přízemní vítr. Pro kosmická návratová tělesa je to zcela unikátní problém, jelikož nejsou balistickou střelou ani letounem. Balistická střela se snaží trefit cíl za vysoké rychlosti, takže podobně jako projektil využívá vysokého balistického koeficientu a vysokou rychlost po celou dobu letu k eliminaci rušivých vlivů. Naproti tomu letadla s nosnými plochami jsou rušivými vlivy prostředí ovlivňována velkou měrou, ale řidicí plochy jim umožňují tyto nežádoucí vlivy poměrně snadno vyrovnávat. Svisle přistávající raketový stupeň ani jednu z těchto výhod nemá a proto je přesné přistání s takovým létajícím prostředkem extrémně náročné.
Nedávné pokroky
V průběhu posledních dvou let dokázaly dvě komerční společnosti, SpaceX a Blue Origin, vyslat své rakety do kosmu a přistát s nimi zpět na Zemi s přesností několika málo metrů od vytyčeného místa. Raketa New Shepard od Blue Origin několikrát přistála na testovací základně v západním Texasu. První stupeň Falconu 9 od SpaceX opakovaně přistál na plovoucí mořskou plošinu ASDS, a také na pevninu na kosmodromu Cape Canaveral . Následující obrázky zachycují příklady přistání těchto dvou typů.

Zdroj: http://www.flickr.com/
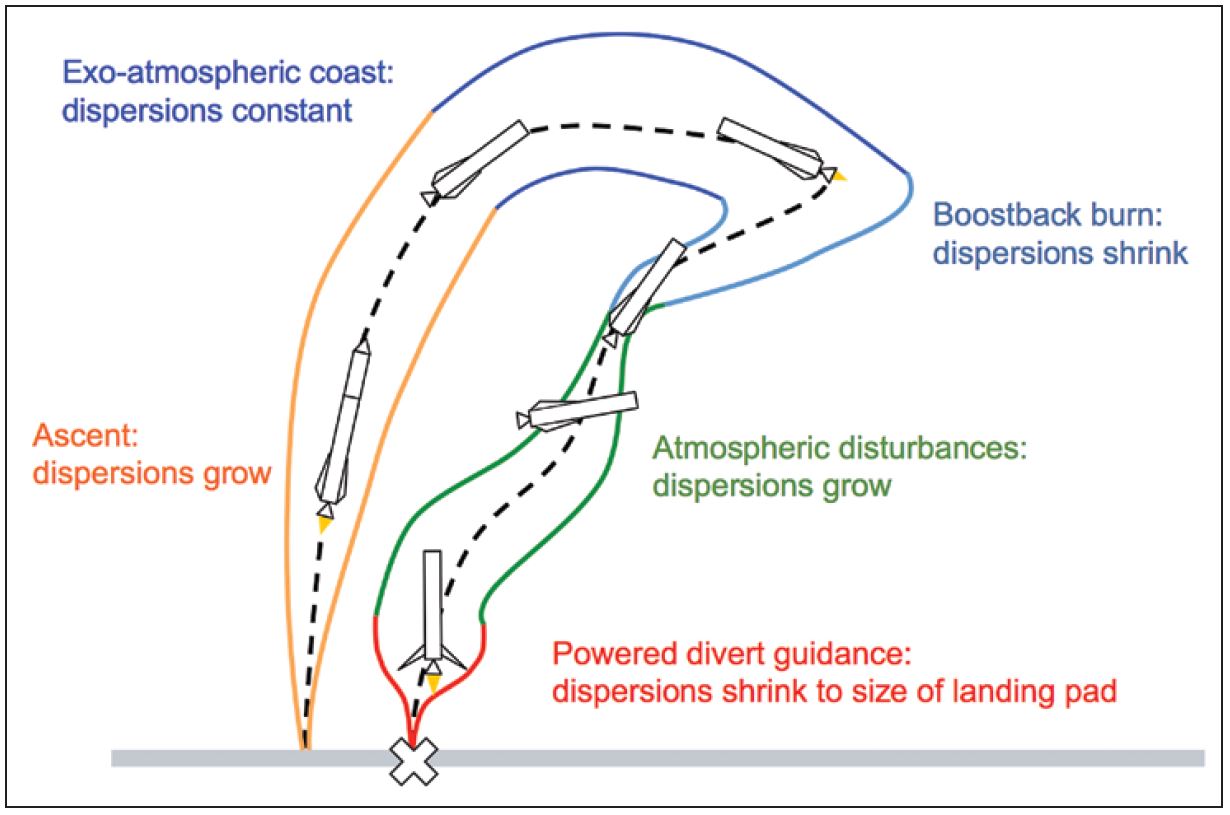
Pro dosažení přesného přistání je klíčovým úkolem ovládání (zmenšování) rozptylu, což znamená aktivní snižování odchylek od ideální trajektorie, způsobené rušivými vlivy a nejistotami parametrů okolního prostředí (např. hustota atmosféry). Pro ilustraci si představme první stupeň nosiče Falcon 9 při návratu z kosmu. Pro dosažení přesného přistání musí být rozptyl po celou dobu sestupu řízen tak, aby se stupeň při dosednutí minimálně v 99% případů strefil do vybrané přistávací zóny. Při přistání na plovoucí mořskou plošinu to musí být maximálně do 10 metrů od středu plavidla, při přistání na pevnině pak maximálně do 30 metrů od středu přistávací plochy na Cape Canaveral.
Zdroj: http://web.mit.edu/
Obrázek vpravo zobrazuje různé fáze letu F9R. Při stoupání (ascent) větry vychylují nosič z nominální trajektorie a zvětšují tím rozptyl. První příležitostí rozptyl zmenšit je zážeh motoru pro návrat (boostback burn), který navrací použitý raketový stupeň zpět ke startovací rampě. Během vstupu do atmosféry výškové větry a nejistoty ohledně stavu atmosféry znovu rozptyl zvětšují (dispersions grow) . Přistávací zážeh je pak poslední možností jak rozptyl znovu snížit (dispersions shrink) a vyrovnat stranové odchylky.
Pro řízení rozptylu u F9R je nezbytně nutné přesné řízení polohy stupně při zpětném zážehu mimo atmosféru, řízení polohy při sestupu atmosférou pomocí roštových kormidel a také schopnost provedení přistávacího zážehu s úhybným manévrem. Posledně jmenovaná dovednost je jednou z nejnáročnějších úloh, která je také klíčová pro přesné přistávání na Marsu.
Kosmický dopravní prostředek musí být schopen autonomně spočítat a řídit trajektorii úhybného manévru z aktuálního místa v prostoru přesně na cíl a to takovým způsobem, aby byl před dosednutím správně zorientován, ve stabilní poloze a přitom nepřekročil provozní limity své vlastní konstrukce. Všechny potřebné výpočty přitom musí být prováděny zcela samostatně a během zlomků sekundy. Chyba při hledání proveditelného řešení této úlohy v reálném čase znamená téměř jistou havárii kosmické sondy či rakety. Chyba při hledání optimálního řešení může znamenat vyčerpání zbytků paliva a stejný výsledek jako v předchozím případě. Navíc závada na některém z HW systémů rakety v této fázi letu bude vyžadovat opakované výpočty a přeplánování přistávací trajektorie.
Obecné řešení těchto úloh v jednom rozměru je k dispozici už od šedesátých let, ovšem ne ve trojrozměrném prostoru. Výzkum v této oblasti během uplynulé dekády ukázal, jak efektivně využívat moderní matematické optimalizační metody, abychom byli schopni tento problém ve 3D prostoru řešit i pro přistání na Marsu a přitom mít jistotu, že nejlepší řešení matematické úlohy bude vždy nalezeno včas.
Protože je pozemská atmosféra přibližně 100x hustší než atmosféra Marsu, jsou to hlavně aerodynamické síly, které mají primární účinky na návratové těleso a rušivé vlivy počasí mohou být ve fázi plánování trajektorie letu z větší míry zanedbány. Ve výsledku to znamená, že přistání na Zemi je velmi odlišná úloha od přistání na rudé planetě. Jak SpaceX, tak Blue Origin předvedli, že je tato úloha v dnešní době úspěšně řešitelná. Ke generování specializovaného letového software SpaceX používá CVXGEN, který dovoluje vysokorychlostní konvexní optimalizaci řešení matematických úloh.
Budoucí vývoj
Ačkoli už pokusy o vysoce přesné přistání na Zemi dosáhly úspěchu, stále existují některé překážky, bránící přenesení těchto technologií k dalším cílům a umožnění přesně přistávat i na jiných tělesech sluneční soustavy. Jedním z těchto problémů je navigace. Přesné přistání vyžaduje, aby raketa či sonda přesně věděla, kde se v daný okamžik v prostoru nachází a jakou rychlostí se pohybuje. Navigační systém GPS je velmi užitečná pomůcka pro přistání na Zemi, všude jinde ve vesmíru ale signál ze žádných navigačních družic nemáme k dispozici. Téměř všechny planetární mise proto závisí na navigaci prováděné ze Země. Enormně velké pozemní radiové antény sledují daleko letící sondu, vypočítávají její polohu a rychlost a tyto údaje posílají do palubního počítače sledované sondy. Tento způsob navigace vyhovuje, pokud má být přesnost přistání řádově v kilometrech, je ale zcela nedostatečný, pokud potřebujeme přistát s přesností v jednotkách či desítkách metrů.
Podobně jako kdybychom řídili auto přes pohled do zpětného zrcátka, je pozemní sledování a navigace méně a méně přesná se zvětšující se vzdáleností. Místo této metody musíme naši pozornost zaměřit více na cílovou planetu, měsíc či asteroid, abychom na takovém tělese dokázali přistát s vysokou přesností. Sonda Deep Impact je dobrým příkladem mise, kdy bylo cílové těleso využito pro finální navigaci, ovšem jednalo se o dopadovou misi, při které měkké přistání nebylo v plánu.
Nedávným vývojem bylo dosaženo navigační přesnosti přistání v desítkách metrů při použití metody relativní navigace podle terénu. Při tomto postupu přistávající sonda během sestupu pořizuje snímky terénu pod sebou a palubní počítač se snaží určité útvary v obrazu porovnat s mapou terénu ve své paměti a stanovit relativní polohu sestupujícího tělesa nad terénem. Tato navigační metoda může být úspěšně testována na Zemi, minimálně její závěrečná část, takže nevyžaduje lety testovacího aparátu až z kosmu.

Zdroj: http://web.mit.edu/
Několik společností v nedávných letech postavilo a otestovalo různá experimentální létající zařízení, aby s nimi demonstrovaly řízený motorický sestup a přistání při krátkých letech (skocích) v malých výškách. Některá z těchto zařízení jsou na obrázku vlevo. Tato „raketová skákadla“ většinou úspěšně otestovala několik variant relativní navigace v pozemském terénu. První demonstrační využití této metody v kosmu se zvažuje až v roce 2020, při přistání nového vozítka NASA na Marsu. Pokud bude toto přistání, kombinující relativní navigaci podle terénu a přesné navádění a řízení ze Země, úspěšné, bude to znamenat dosažení zlatého grálu v podobě přesného robotického přistání lidského výtvoru na Marsu. To nám v budoucnosti umožní rozsáhlejší a kvalitnější průzkum dalších těles naší sluneční soustavy.
Zdroje informací:
http://web.mit.edu/
Zdroje obrázků:
http://web.mit.edu/larsb/www/nae_bridge_2016.pdf
http://www.space.com/…landing-5.jpg?interpolation=lanczos-none&downsize=*:1000
https://c2.staticflickr.com/6/5773/23271687254_29eb69c8fa_k.jpg
https://c2.staticflickr.com/2/1703/26265214251_98bdcbe07b_k.jpg




{kind=link}
{kind=link}
{kind=link}
ďakujem za zaujímavý článok.
Jsem rád, že se vám článek líbí.
Díky za zajímavý článek. Pokud jde o Rover 2020 (už by to chtělo normální jméno) tak doufejme, že bude mít klasickou přistávací elipsu do bezpečného terénu a v případě, že by pokusná relativní navigace zcela selhala, nebude přistání ohroženo.
Prozatím bylo vybráno 8 kandidátů na místo přistání roveru 2020.
Další kolo výběru proběhne 8-10.2.2017. Všechna místa obsahují prostor pro přistávací elipsu 16 x 14 km. K jakému zpřesnění/zmenšení elipsy ještě do startu za 3 roky dojde, to se uvidí.
Mým favoritem pro místo přistání je kráter „Jezero“.
Je fascinující sledovat postupné zmenšování přistávací elipsy. S každou další misí je menší a menší. Od Vikingu až po Curiosity. Jsem zvědav, na jak malou přistávací elipsu si troufne ESA.
Podle tohoto ESA článku z 05/2016 bude přistávací elipsa pro ExoMars lander/rover 104 x 19 km. http://exploration.esa.int/mars/53845-landing-site/
Přesné přistání na jiném tělese, příkladně Marsu přichází v úvahu zejména při nutnosti přistát v blízkosti jiného aparátu. V tom případě by problém vyřešil maják v cíli, což je jednoduché.
Obecně je v současnosti problémem jakékoli přistání na Marsu, což negativně demonstrovali nedávno Evropané.
Z tři roky se tento stěžejní problém pokusí potřetí vyřešit Evropa, nově snad i Čína a půjde “ jen „, tedy hlavně o to přistát a to kamkoli a jakkoli cíl, necíl.
Připomínám, že ani Američanům se všechna přistání na Marsu nevydařila a vykazují jeden neúspěch.
Nutnost přesného přistání se pomalu blíží. Rover 2020 nechá na povrchu kontejnery se vzorky a budoucí návratová mise je naloží a dopraví na Zemi. Řekl bych, že bude vybavena nějakým jednodušším roverem, takže to bude chtít přistát opravdu poblíž.
Ad „ani Američanům se všechna přistání na Marsu nevydařila a vykazují jeden neúspěch.“ – Těch nezdarů měli více. Většinou se uvádí jen Mars Polar Lander v roce 1999, ale ve stejném roce došlo ještě ke dvěma pokusům o přistání v rámci programu Deep Space 2. Oba moduly Scott i Amundsen se ale z povrchu neozvaly a jejich osud zůstává neobjasněný.
Šlo o samostatná zařízení (byť se k Marsu „svezla“ jako sekundární zařízení) a zcela samostatné pokusy o přistání, takže bych je určitě taky jako neúspěchy počítal.
Tohle je trochu zavádějící. Scott a Amundsen byly penetrátory. A byly k Marsu dopraveny spolu s Mars Polar Landerem a jejich neúspěch se tedy datuje současně s MPL. Scott, Amundsen a MPL byli součástí jednoho celku (plus přeletový prstenec). Ale souhlasím, že všechny tři objekty byly nezávislé. MPL se od přeletového prstence oddělil, ovšem zda se tak stalo i v případě obou penetrátorů, to už asi navždy zůstane otázkou. Každopádně se ani penetrátory ani lander z povrchu neozvali.
Nevidím na tom nic zavádějícího. Ostatně sám to píšete: využívaly společný přeletový modul, ale o přistání se všechny tři sondy (i penetrátor je přistávací sonda, byť využívá tvrdé přistání) pokoušely zcela nezávisle. Oba penetrátory využívaly jinou technologii přistání, takže o důvod víc je považovat za zcela samostatné pokusy.
Napsal jste: „Většinou se uvádí jen Mars Polar Lander v roce 1999, ale ve stejném roce došlo ještě ke dvěma pokusům o přistání v rámci programu Deep Space 2.“
To vypadá tak, jako by k dalším dvěma pokusům došlo ve stejném roce, ale jindy při jiné misi. Proto jsem to raději rozvedl s tím, že MPL + DS2 proběhly současně a měly stejný dopravní prostředek 🙂
Maják v cíli mnoho neřeší, pro alespoň trochu přesnou navigaci by byly potřeba alespoň tři dost daleko od sebe.
Naopak. Maják v cíli spolu s radarem, akcelerometrem a přesným gyroskopem řeší bez problémů celou navigaci.
Dobrý den, super článek.
Má však pro mne neznámé slovo: decelerátor
Prosím znalejší o poučení.
Předem děkuji.
Děkuji za pozitivní hodnocení článku.
Otrocky přeloženo, decelerátor znamená brzdič, zpomalovač. V nedávné době došlo k otestování nafukovacích tepelných štítů, připravených v NASA/JPL. Testy zpomalování těžkých nákladů pomocí nafukovacího štítu ale nebyly zcela úspěšné kvůli závadám na padáku. Mnohem perspektivnější, ale taky rizikovější metoda brzdění nákladu při průletu atmosférou je retropropulzní supersonický zážeh brzdicích raketových motorů. NASA se této metody poměrně obávala – ještě ji na Marsu neotestovala. SpaceX ale nasbírala už poměrně hodně zkušeností s podobnými zážehy při návratu prvních stupňů F9R a hodlá retropropulsní brzdění použít v roce 2018 při první misi Red Dragona na Mars.
Super článek, díky.
Bez přesného přistávání se neobejde budování základny na jakémkoliv tělese.
Díky za pozitivní ohlas.
Je to tak, přesné a bezpečné přistání tam kde potřebuji, to je základ. Bez toho se nepohneme dál.
Je možné, že budou v budoucnu instalovány na stacionární dráze Marsu podobné satelity typu GPS nebo Galileo, kvůli bezpečnosti posádek přistávající na planetě?
Ano, jednou určitě budou, má to v plánu SpaceX i NASA. Jako dnes i v budoucnu bude kolem Marsu stále kroužit několik družic. Kdy ale budou schopny sloužit jako navigační prostředky, to zatím není jasné.
Děkuji za odpověď
Dovoluji si Vás obtěžovat ještě jednou otázkou.
Je možné že soukromé firmy např. SpaceX, budou mít dříve k dispozici těžké nosiče než je SLS od NASA.
Psali jste že letos má startovat Falcon Heavy.
Když jsem ji viděl, tak mě napadlo kdyby se přidal jeden nebo dva postranní motory,zda by neměla stejnou nosnost jako SLS.
S možností opakovaných startů, by to byl relativně levný nosič.
Ale asi to není tak jednoduché?
Otázka úpravy FH postranními SRB motory na TPH je dost mimo téma tohoto článku.
Nicméně za SpaceX mohu s plným vědomím prohlásit, že k tomu nikdy nedojde. Je to zcela mimo filosofii a směr, kterým se vývoj SpX nosičů ubírá.
Otázka možno smerovala k možnosti pridať na FH ďalšie dva stupne F9. Tam by však bolo potrebné minimálne upraviť štartovaciu rampu.
Myslíte nějaký Falcon Super Heavy, skládající se místo ze 3 tak z 5 boosterů v prvním stupni? K tomu určitě taky nedojde. už vyvinutý FH bude mít nosnost >50 t na LEO.
Pokud bude potřeba vynést cokoli těžšího, bude pro to použit BFR s nosností >300 t na LEO.
Mám ten istý názor, len som chcel upresniť otázku. Ďakujem.
To by chtělo navíc ještě výrazně posílit horní stupeň, jinak by to bylo značně neefektivní. Tedy ne, po pouhém přidání boosterů by „Falcon Superheavy“ SLS nepřekonal.
Horní stupeň F9/FH bude posílen relativně brzy – bude osazen novým motorem Raptor s palivovou směsí kapalný metan + LOX. Na tomto upgradu se finančně podílí i USAF.
Píšete, že většinu energie těleso ztratí třením o atmosféru.
Kinetickou energii přilétající těleso ztrácí tím, že stlačuje (a tím i ohřívá) atmosféru (plyn) před sebou. Molekuly plynu se pohybují pár set metrů za sekundu, těleso o řád vyšší rychlostí, tj. molekuly plynu neuhnou.
Nejsem si jistý, že zrovna v tomto případě by se mělo mluvit o tření (to mám spojené se škrtnutím zápalky).
Pokud mluvíme o tření, jde samozřejmě o zjednodušení … v tomto článku ale asi nemá smysl motat čtenářům hlavu s pojmy jako: vlnový odpor, tvarový odpor, indukovaný odpor, třecí odpor, atd. Stále platí, že při EDL na Marsu všechny sondy snižují svou rychlost přibližně o 90% díky odporu atmosféry, který působí na tupě tvarované „návratové těleso“ a brzdí jej.
Super článek na zajímavé téma.díky.
Díky za pozitivní ohlas, jsem rád, že se vám článek líbil.
Každopádně chválím přesný doslovný překlad.
Ale přesto mám trochu pocit, že by bylo obecně prospěšné, kdyby se alespoň takto na závěr zmínil jeho autor, kterým je právě Lars Blackmore – hlavní inženýr pro přistávání raket ve SpaceX.
Ne každý si to totiž v přiloženém odkazu na časopis Bridge dohledá.
Díky za připomínku, Raule. Ano, tento článek je překladem anglického originálu, na který je odkázáno ve zdrojích. Nikde se netvrdí, že jsem původním autorem. Nevšiml jsem si ale, že by na tomto blogu bylo zvykem uvádět jména všech autorů použitých zdrojových textů. Kdo chce, ten si to v odkazech najde.
Přesně tak. Odkaz tam je, každý si může tuto informaci (i další) snadno dohledat. A už mnohokrát se nám stalo, že čtenáři do komentářů doplnili různé další zajímavé informace.
Měl jsem spíš pocit, že to nemusí být nezajímavá informace takto do komentáře a to i když to není uvedeno přímo v článku.
Však ano, od toho tu komentáře jsou. Kdokoliv má nějaké doplnění k článku, může nám ho napsat. 😉