
Pro kamenné planety a měsíce s poměrně velkou gravitací se skvěle hodí k cestám po povrchu vozítka s koly. Ostatně rovery jako Curiosity a Opportunity na Marsu nebo Lunochod a Yutu na Měsíci to jasně potvrdily. Ale co na malých tělesech jako jsou komety či asteroidy? Tam je gravitace tak nízká, že i sonda o hmotnosti 100 kg váží na povrchu takového tělesa jako list papíru na Zemi. Zdá se, že JPL, Stanfordská univerzita a MIT si ví rady.
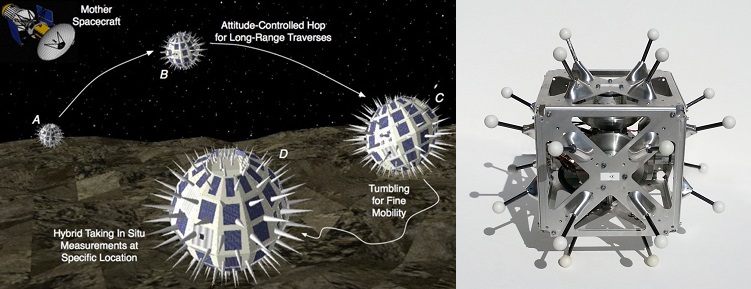
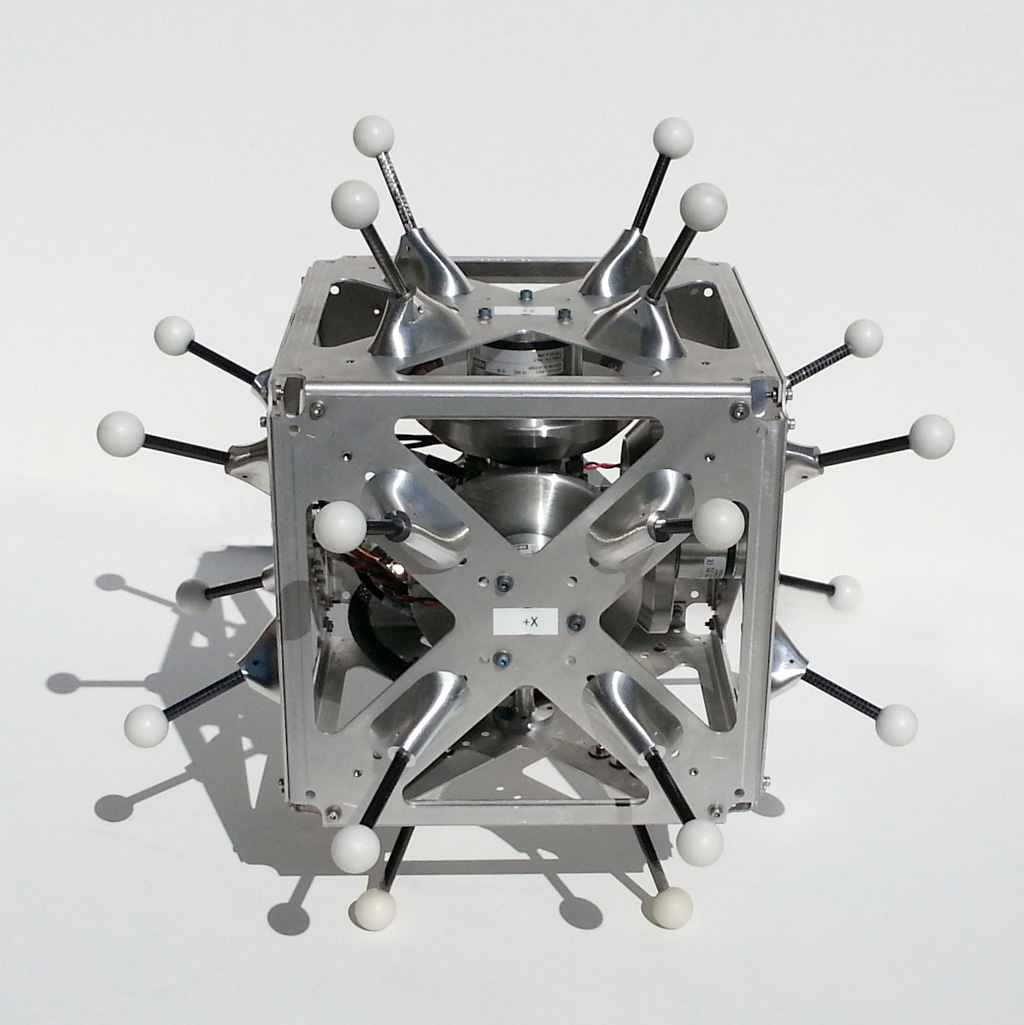
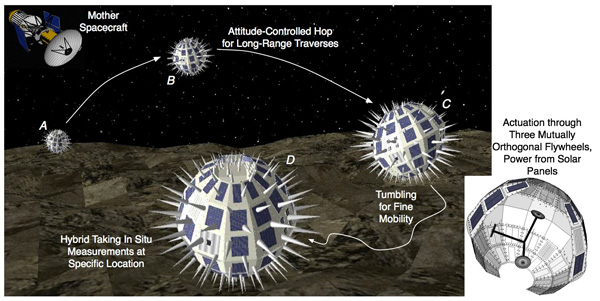
Pro malá tělesa s nízkou gravitací vymysleli společně koncept Hedgehog – Ježek. Jeho aktuální verze na úvodním obrázku už sice ono zvířátko s bodlinami tolik nepřipomíná, ale když si prohlédnete některé návrhy nebo jednu z prvních realizovaných verzí, tak uznáte, že tvůrci nemohli vybrat příhodnější název.
zdroje: space.com, nasa.gov
Hedgehog skutečně postrádá kola a přesto se pohybuje. Jeho pohyb spočívá v otáčení a skocích, které zajišťují tři setrvačníky. Jejich motorky umožňují prudké roztočení a změny otáček, stejně tak brzdy dokáží setrvačníky prakticky okamžitě zastavit. Díky tomu se robot dokáže otáčet na místě, pomalu se skutálet nebo se naopak prudce vymrštit požadovaným směrem. Základním konceptem je krychle s hroty, které chrání robota při styku s terénem. Je výhodné umístit do hrotů například teplotní čidla.
Dva roboti – Ježci se podrobili testům v letadle C-9 s parabolickou dráhou letu, umožňujícím na krátkou dobu (řádově několik desítek sekund) pokusy při různé úrovni gravitace až do 0 G. Oba mají tři setrvačníky a 8 hrotů. Typ z JPL má hmotnost 5 kg, delší hroty a kotoučové brzdy na setrvačnících. Stanfordský typ je lehčí s kratšími hroty a brzdí třecími pásy.

zdroj: regmedia.co.uk
Při 180 parabolách během čtyř letů se testovaly různé manévry na různých typech povrchů. Nechyběly písčité, skalnaté, kluzké, ale i měkké a drolivé povrchy. Ukázalo se, že roboti jsou schopni zvládnout všechny výše uvedené pohyby včetně manévru „tornádo“, kdy dojde k prudkému roztočení a zároveň vymrštění, což by jim mělo pomoci v případě, že by zapadli v písečné duně nebo jiném nebezpečném místě.
Na trajektorii skoku má velký vliv geometrie hrotů. Nejvýhodnějším se ukázalo umístění v rozích krychle, přestože se experimentovalo s různými místy a počty hrotů (viz obrázek první verze). Finální tvar Hedgehogu má kromě skvělé manévrovatelnosti i výhodu snazší výroby (je to prakticky cubesat) a přibalení ke kosmickému stroji, jenž ho má dopravit do cílové destinace.
Na následujím videu si můžete prohlédnout animaci sestavení Hedgedogu a hlavně od času 1:03 samotné testy v letadle C-9 včetně „tornáda“.
V současné době vědci pracují na zvýšení autonomie „Ježka“, které by mu umožnilo fungovat v podobném režimu jako vozítka na povrchu Marsu. Po odeslání pokynů ze Země přes retranslační mateřskou sondu by robot pracoval a pohyboval se po povrchu sám a odesílal by vědecká data a telemetrii. Mateřská sonda by zjišťovala jeho polohu a pomáhala mu s navigací.
Nemuselo by zůstat u jednoho exempláře pro jednu misi. Mateřská sonda by hedgehogy mohla doslova posít jedno nebo několik těles a při průletech pak s nimi komunikovat. Cena mise by se na poměry NASA pohybovala poměrně nízko. Jeden z projektů jménem Phobos Surveyor, jehož cílem je, jak už název napovídá, větší z martských měsíců, se snaží o zařazení do nízkonákladové třídy Discovery, kde je finanční strop 250 miliónů dolarů.
Nebýt série poruch a neopravitelných závad, mohli jsme se skákajícího robota dočkat už na sondě Hayabusa. Svou příležitost promarnil minutím cílového objektu přibalený robůtek Minerva. Na této animaci si prohlédněte, jak měl po asteroidu Itokawa poskakovat. Nakonec poskakování po kometě 67P nám díky nefunkčním přítlačným tryskám předvedl i evropský lander Philae. Takže lze usuzovat, že Hedgehog má velkou naději na úspěšný průzkum malých těles, pokud se týmům JPL, Stanfordské univerzity a MITu podaří přesvědčit vedení NASA, aby ho zařadilo do vhodného programu.
Zdroje informací:
http://www.jpl.nasa.gov/news/news.php?feature=4712
http://spectrum.ieee.org/automaton/robotics/space-robots/robotic-space-hedgehogs-tumble-across-asteroids
http://www.space.com/19342-space-hedgehogs-mars-moon-phobos.html
Zdroje obrázků:
http://imagecache.jpl.nasa.gov/images/640×350/JPL-20150803-mTech-640-640×350.jpg
http://www.jpl.nasa.gov/images/technology/20150903/tech2015090.jpg
http://www.jpl.nasa.gov/spaceimages/images/largesize/PIA18536_hires.jpg (JPL, červen 2014)
https://regmedia.co.uk/2015/09/07/hedgehog_mid_tornado.jpg?x=648&y=429&crop=1
http://www.space.com/images/i/000/025/188/original/phobos-surveyor-hedgehog-probes.jpg?1358610613
http://spectrum.ieee.org/img/GeneralFeatures-1441865608204.jpg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
V Americe začali číst Foglarovky?
Ale vůbec to nevypadá špatně. Minimálně by to dobře řešilo problémy typu zakutálený Philae.
Akorát tenhle ježek by se mohl z klece dostat sám. Stejně by nám byl návod na vyjmutí k ničemu, když má všechny ostny stejně dlouhé 🙂
Upřesnil bych poslední odstavec. Modul MINERVA příležitost dostal. Byl sondou Hayabusa úspěšně vypuštěn vstříc planetce Itokawa, komunikace probíhala, problém byl jen v tom, že ji poněkud minul a vydal se k samostatnému letu na heliocentrické dráze.
Tak snad uspěje trojdílná MINERVA 2, kterou nese Hayabusa 2.
Diky za doplnění. Až se dostanu k počítači, tak to upřesním i v článku.
Z čeho to budou napájet ?
No tak to mě přesně napadlo.
Nevím jak u těchto budoucích, ale třeba modul MINERVA byl celý obalen slunečními panely.
Ve zdrojích to nebylo, ale předpokládám, že testovací kusy měly pouze interní baterie. Ostré kusy pak určitě budou pokryty solárním i články.
no nevím jestli to vydrží ty panely nárazy
Bavíme se o tělesech s minimální gravitací. Myslím si, že poškození by nebylo velké. Ale pro jistotu by se dala použít nějaká ochranné vrstva – něco ve stylu GorillaGlass z mobilních telefonů. 😉
O panely bych strach neměl ale mám obavy jestli bude stačit jejich výkon. Komety nebývají po většinu času poblíž Slunce.a to samé může být u asteroidu a planetek. Ty ježci budou hodně malí a tedy i panely, něco budou stinit ty nohy a kolem nich to nepůjde nainstalovat.
Zase na druhou stranu dělají solární panely ohromné pokroky – dříve nebylo myslitelné, aby se k Jupiteru vydala sonda, která spoléhá pouze na ně – no a vida, na cestě je JUNO. Vývoj pokračuje dál a časem budou i tyto malé panely dodávat dostatek energie. Dokážu si představit i situaci, že by panely třeba několik hodin nabíjely baterii, ze které by pak byla energie odčerpána pro vykonání manévrů – a pak by se zase pár hodin nabíjelo.