Setkávání na oběžné dráze není snadný úkol. V současné době se nejčastěji používá spojování dvou aktivních těles, která při vzájemném přibližování spolupracují, vyměňují si informace o vzájemné poloze, rychlosti a dalších důležitých faktorech. Jenže v kosmonautice existují i případy, kdy je potřeba provést spojovací manévr za použití pouze jediného aktivního tělesa. Co si v takovém případě počít? Odborníci z Evropské kosmické agentury se snaží na tenhle technologický oříšek nějak vyzrát.
Pod výrazem „nespolupracující těleso“ si můžeme představit ledacos – od porouchaného satelitu, ke kterému má doletět servisní družice, přes úlomek kosmického smetí, až po pouzdro se vzorky, které se má na oběžné dráze zachytit a dopravit na Zemi. Problém zůstává stále stejný – jak zajistit aktivnímu stroji přesné informace o vzájemné poloze.
Na začátku července by z evropského kosmodromu v Kourou měla odstartovat raketa Ariane 5. Na oběžnou dráhu vynese poslední exemplář zásobovací lodi ATV s přídomkem Georges Lemaître. Vlastnímu startu i nákladu v útrobách lodi se budeme na našem blogu věnovat, až bude téma aktuální. Dnes nás ale zajímá sada senzorů, které budou fungovat během přibližovacího manévru k ISS.
Zdroj: http://blogs.esa.int/
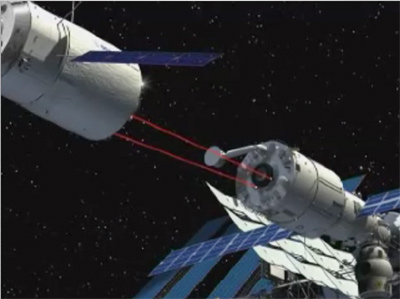
Čtyři doposud vypuštěné lodě ATV zatím neměly během připojování ke stanici problémy. Ve větší vzdálenosti od ISS spoléhaly na družicové navigační systémy, v blízkosti stanice pomáhaly videometry a telegoniometry, které spoléhaly na světlo odražené od povrchu ISS. Na zadní části modulu Zvezda bylo za tímto účelem umístěno několik odrazných ploch.
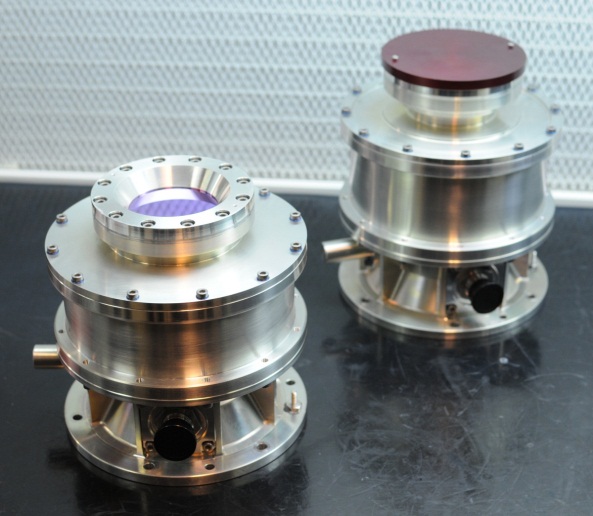
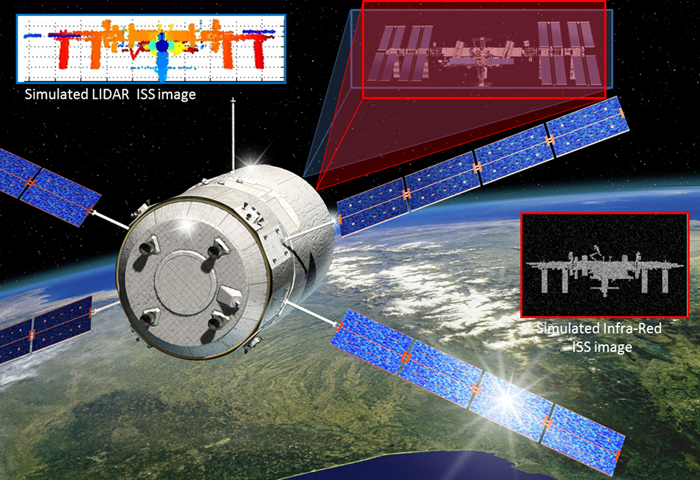
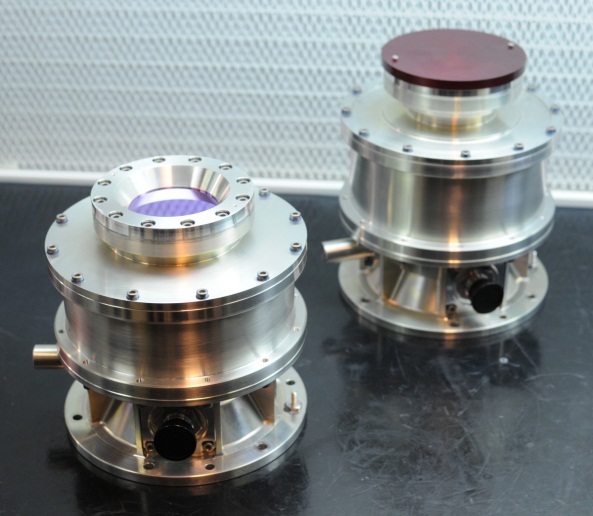
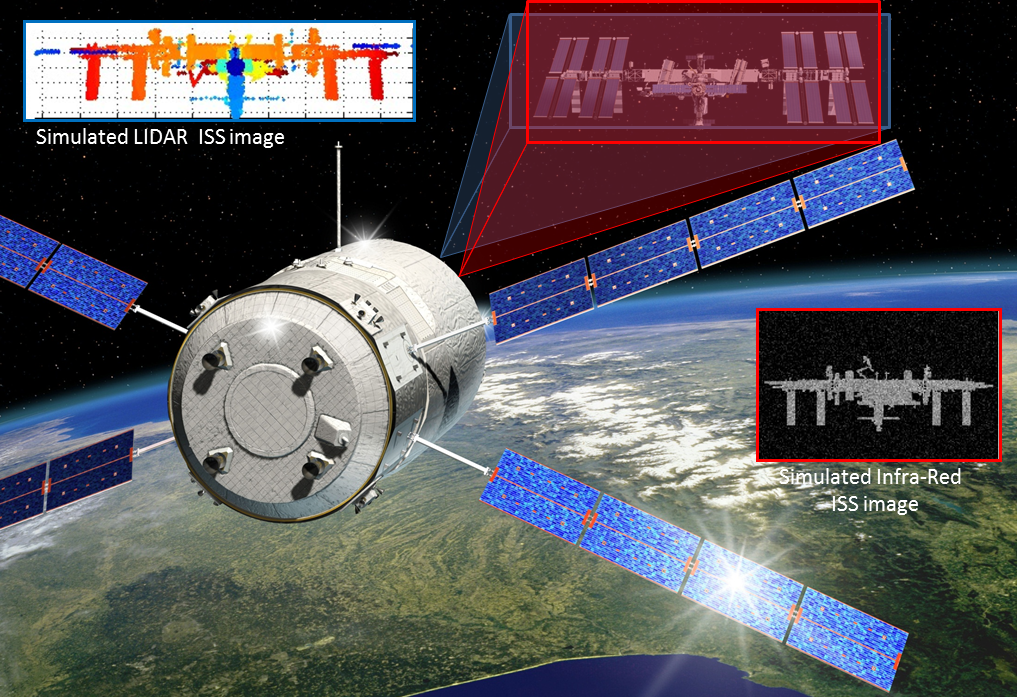
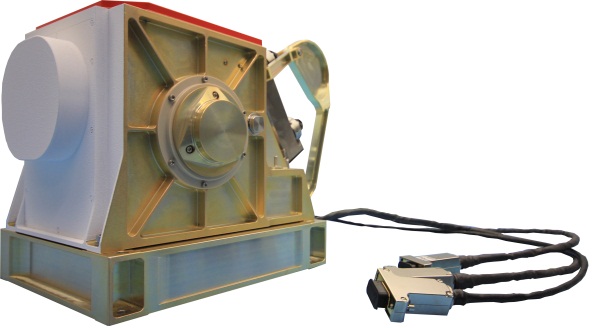
Na vnějším plášti lodi bude umístěný demonstrátor LIRIS (Laser InfraRed Imaging Sensors), který využívá hned několika monitorovacích metod. Když bude ATV od stanice vzdálená 30 kilometrů, aktivují se infračervené kamery, které budou zaměřené právě na ISS. Ve vzdálenosti 3,5 km dojde k jejich deaktivaci a místo nich se zapne lidar. Jedná se o přístroj podobný radaru, rozdílem je ale používání světelného paprsku místo radiového. Na Zemi provedené simulace naznačují, jak by zhruba mohly vypadat snímky z lidaru během přibližovacího manévru ke stanici.
Zdroj: http://blogs.esa.int/
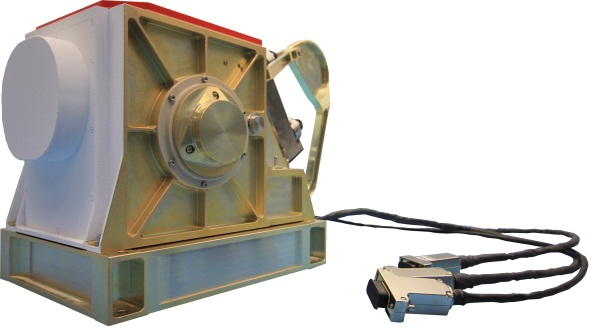
Dodávku infračervené kamery zajistila francouzská společnost Sodern, lidar pochází z výrobní linky firmy Jena-Optronik z Německa. Všechna data nasbíraná během přibližovacího manévru lodi ke stanici se budou ukládat do záznamníků umístěných uvnitř ATV. Díky tomu se k nim budou moci v dalších letech technici vrátit. V budoucnu by se měla data nasbíraná infrakamerami a lidarem použít přímo v hlavním počítači lodi, který se na jejich základě bude rozmýšlet, jak má stroj navigovat.
Je jasné, že při tomto prvním testu bude přístroj LIRIS pouze v roli pozorovatele. Naměřená data se nebudou používat k navigaci lodi – ta poběží na osvědčených systémech popsaných na minulých řádcích.
Zdroj: http://blogs.esa.int/
Jelikož už po ATV-5 Georges Lemaître žádná další evropská loď nepoletí, přichází nasazení demonstrátoru LIRIS za pět minut dvanáct. Pozemní týmy odvedly při simulacích mnoho práce, ale reálná data nasbíraná přímo ve vesmíru to samozřejmě nahradit nemůže. Díky tomu, že bude LIRIS fungovat již ve vzdálenosti 30 kilometrů od stanice a data se budou zaznamenávat po celou dobu přibližování, bude k dispozici dostatek materiálu pro další rozbory.
Zdroje informací:
http://www.esa.int/
http://blogs.esa.int/
Zdroje obrázků:
http://www.redorbit.com/media/uploads/2012/02/spacepress-022312-002c.jpg
http://blogs.esa.int/atv/files/2014/03/image3.jpeg
http://blogs.esa.int/atv/files/2014/03/image5.png
http://blogs.esa.int/atv/files/2014/03/image4.jpeg





{kind=link}
{kind=link}
{kind=link}
{kind=link}