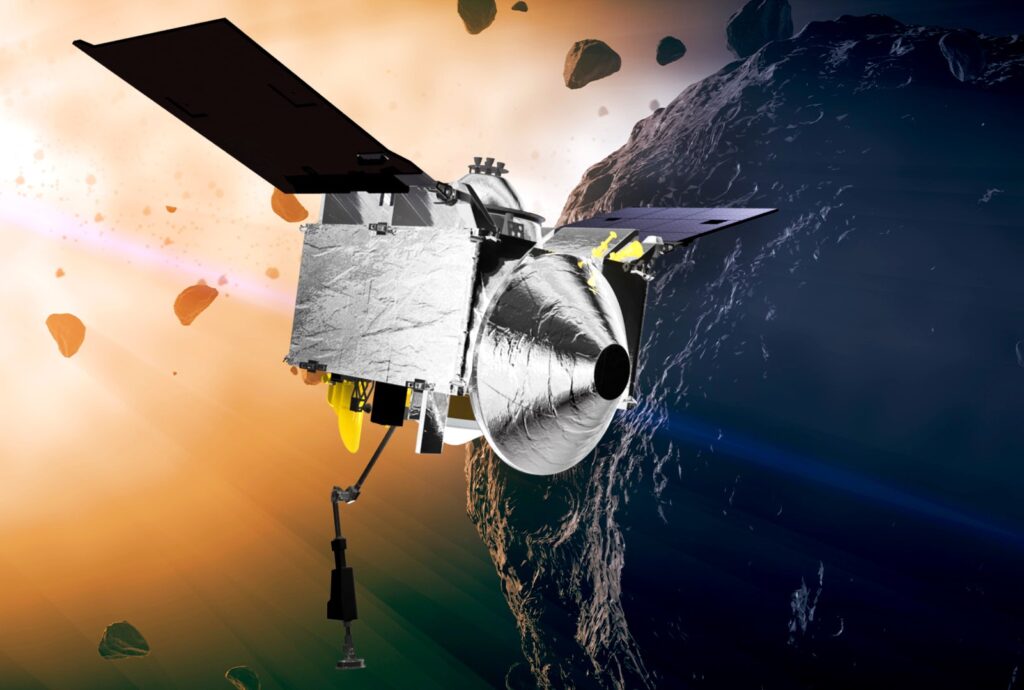
Start sondy OSIRIS-REx patří mezi nejdůležitější momenty letošního roku. Je proto jasné, že se téhle sondě budeme věnovat podrobněji, než ostatním projektům. To ostatně dokládá i dnešní článek. Do seriálu Pohled pod kůži se totiž dostanou jen ty nejvýznamnější projekty, u kterých stojí za to sepisovat opravdu dlouhé články zaměřené na jejich technické řešení. Jak jste si již zvykli, bude i povídání o této sondě rozděleno do více článků. V prvním se podíváme na konstrukci samotné sondy, v příštím se detailně zaměříme na vědecké přístroje, třetí díl bude speciálně věnován odběrovému mechanismu vzorků a v závěrečném čtvrtém díle si popíšeme návratové pouzdro na vzorky.
Zdroj: spaceflight101.com
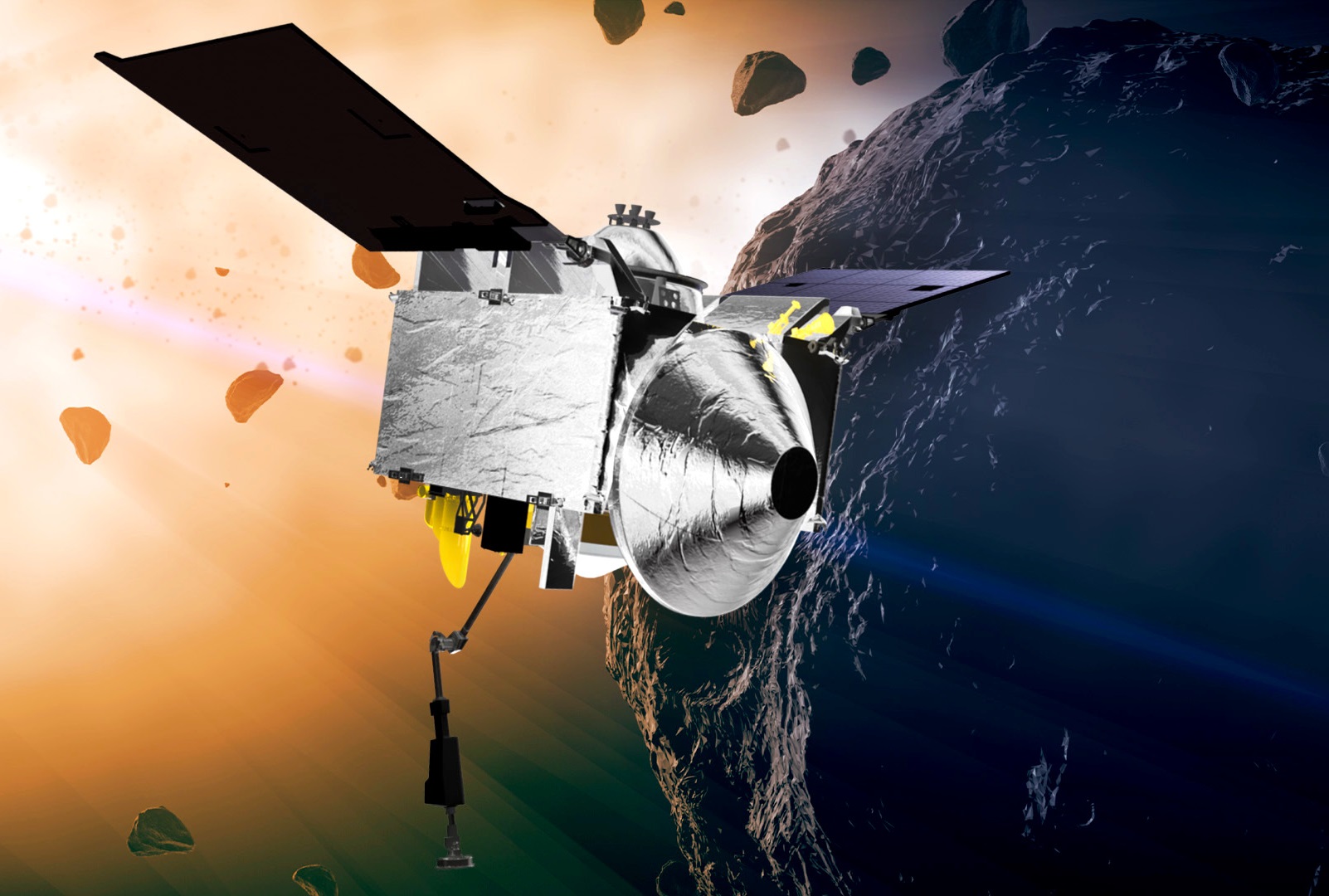
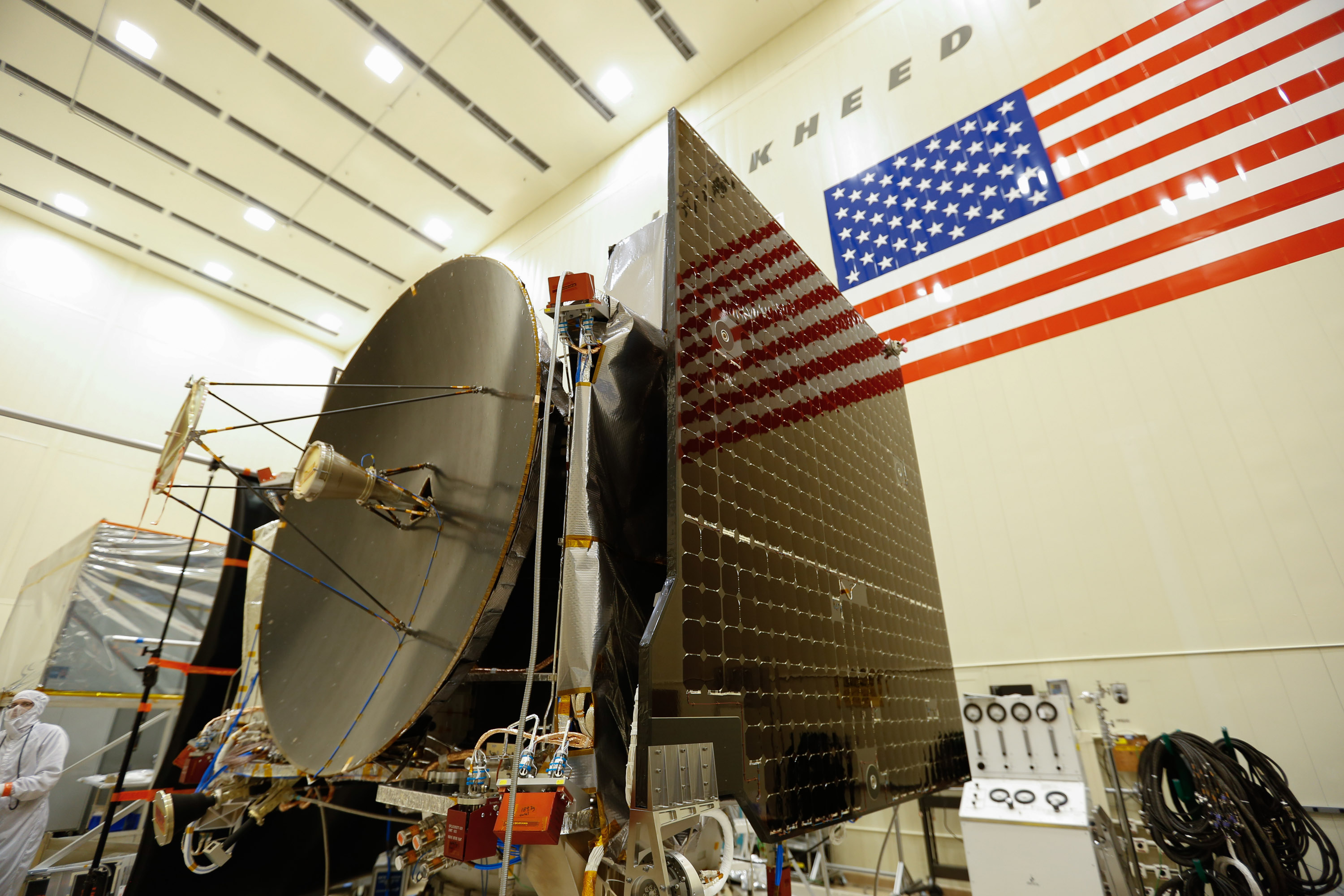
Sonda OSIRIS-REx vznikla ve firmě Lockheed Martin Space Systems a její technický návrh vychází ze sond Mars Reconnaissance Orbiter (MRO) a MAVEN, které krouží kolem Marsu. Tím, že OSIRIS-REx využívá osvědčených technologií, u kterých víme, jak odolávají dlouhodobým kosmickým vlivům (tady je řeč především o MRO), snižují se rizika, která by při několikaleté misi mohla nastat. Další výhodou je, že tento přístup snižuje cenu nové sondy.
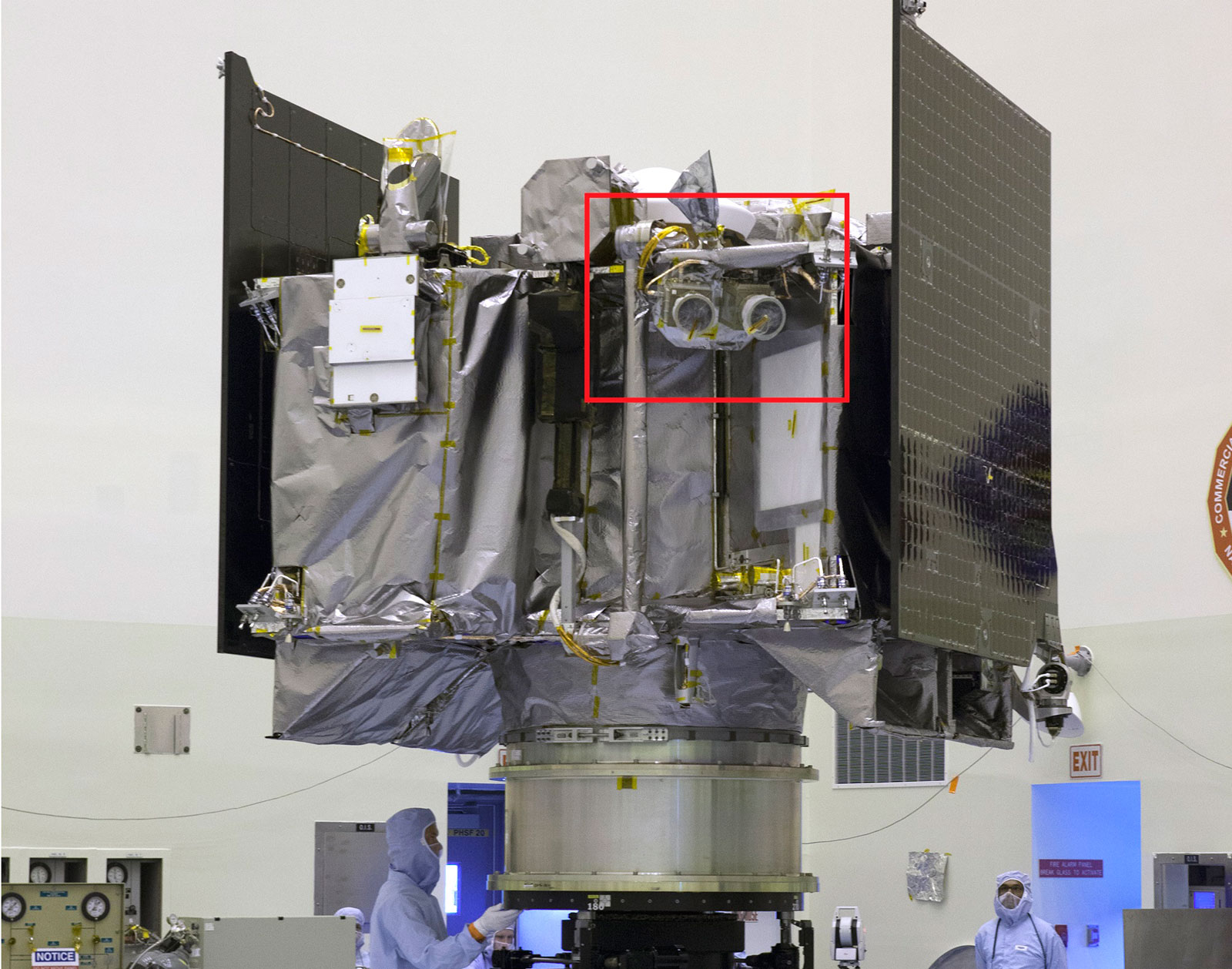
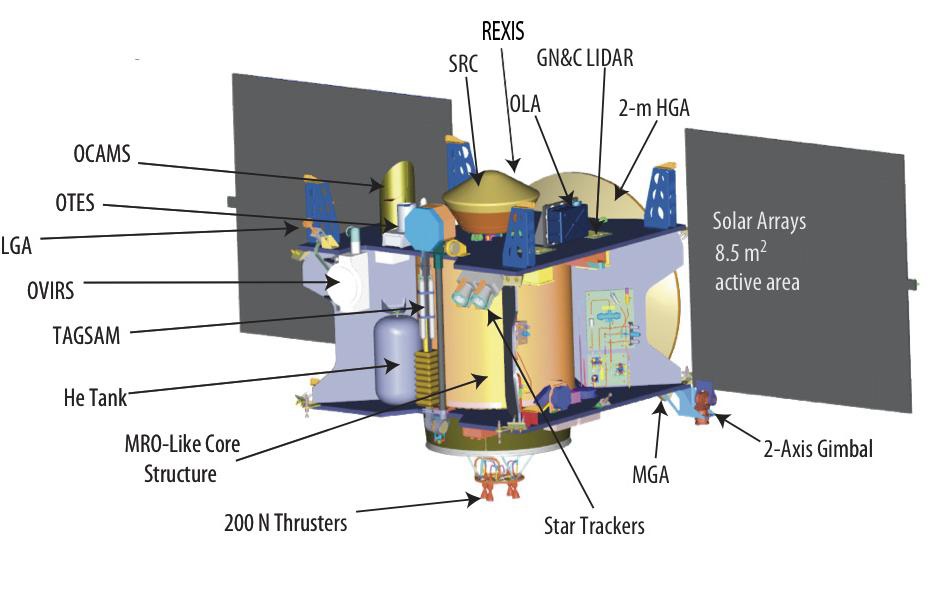
Jelikož na sondu čeká opravdu dlouhá mise, která skončí až v roce 2023, byl při její stavbě kladen výjimečný důraz na kontrolu všech systémů, ale už ve fázi plánování se myslelo na redundaci, tedy zálohovatelnost klíčových systémů. Sonda ve složeném stavu má tvar kvádru se čtvercovou základnou 240 × 240 centimetrů, který je 315 cm vysoký. S prázdnými nádržemi sonda váží 860 kg, ale při startu už měla nádrže natankované palivem a vážila 1955 kilogramů.

Zdroj: spaceflight101.com/
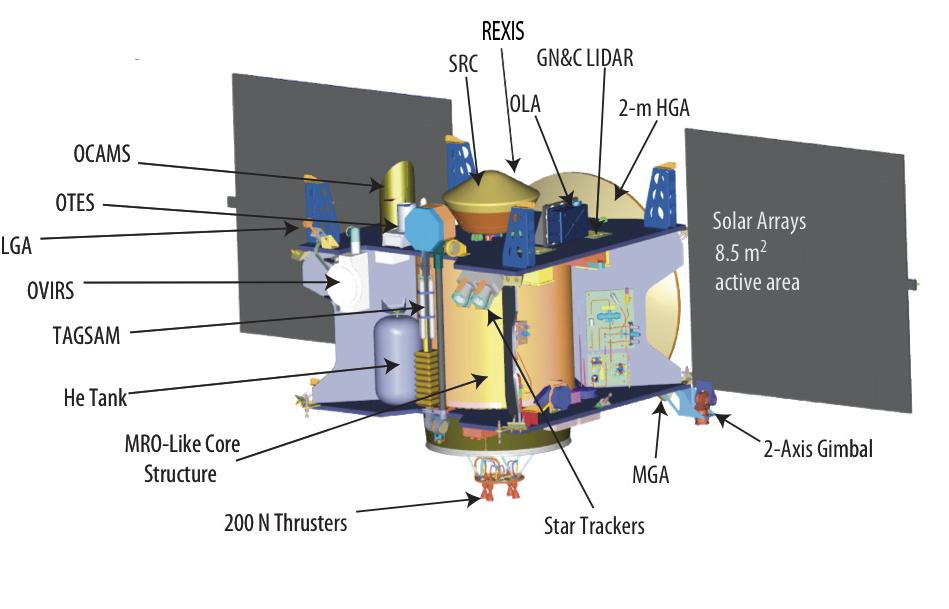
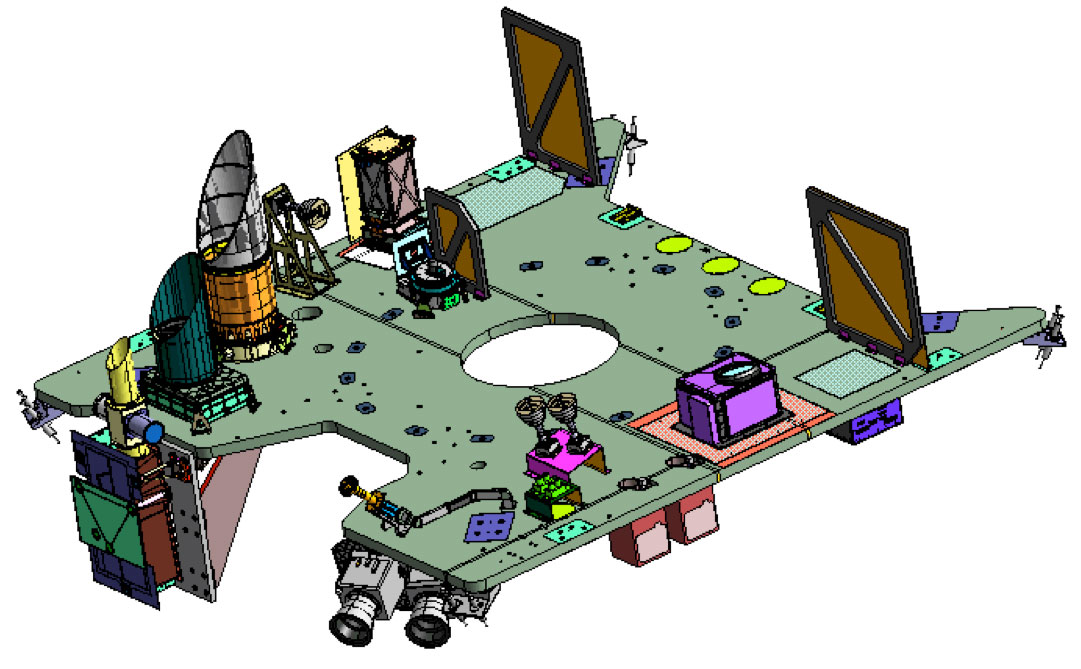
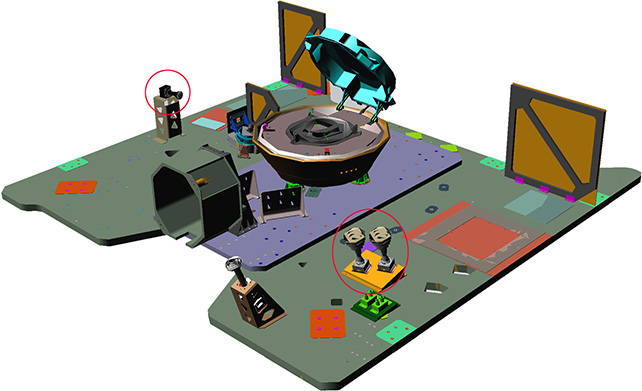
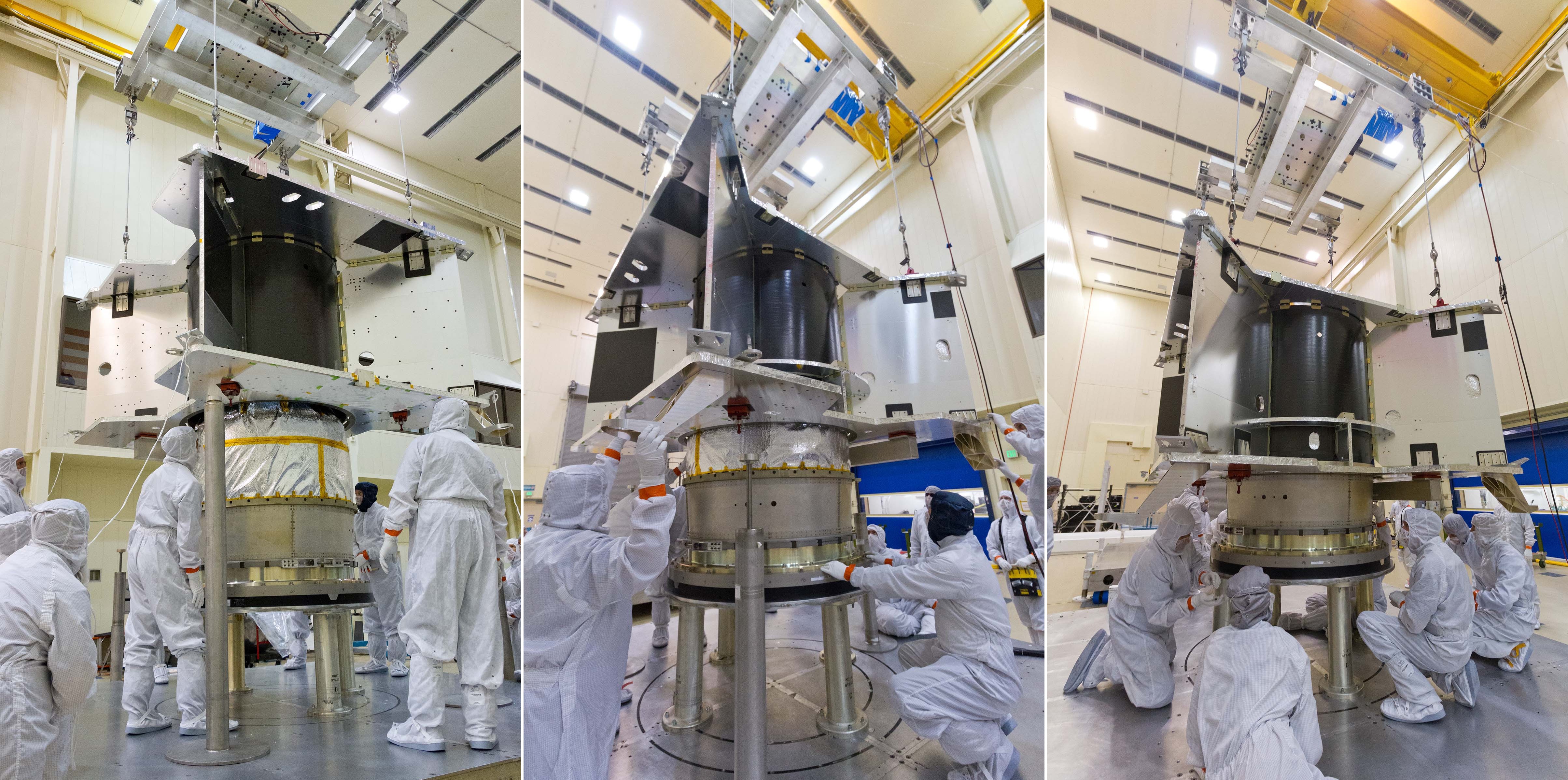
Sonda je postavená kolem kostry, která má rozměry 230 × 230 × 200 centimetrů, která je tvořena hliníkovou konstrukcí s plástvovitou (voštinovou) strukturou, která je sendvičově uzavřena mezi grafitové kompozity. Uprostřed hlavní konstrukce najdeme válec o průměrů 1,3 metru, ve kterém se ukrývají nádrže sondy. Centrální válec společně s radiálně připojenými vzpěrami poskytuje jednak tuhost celé konstrukce, ale zároveň umožňuje připojení nejrůznějších systémů sondy. Toto jádro váží 160 kilogramů.
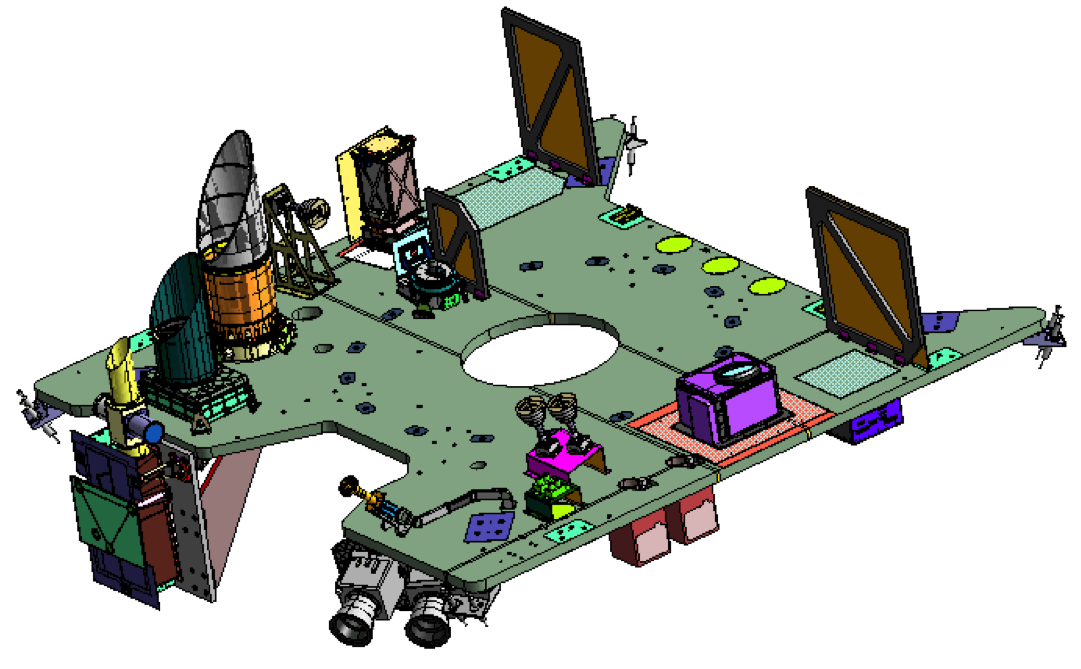
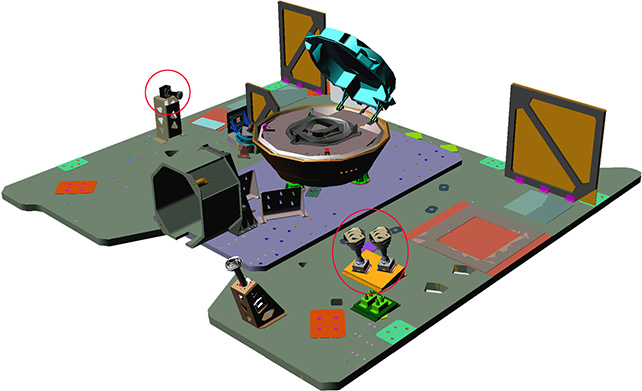
V útrobách sondy najdeme dvě patra, která jsou umístěna v horní a spodní části středového válce. Horní panel nese zařízení SARA (Sample Acquisition and Return Assembly) pro odběr vzorků, vědecké přístroje, navigační systémy a antény. Spodní panel obsahuje baterie, středněziskovou anténu, gyroskopy a systém pro kontrolu solárních panelů.
Zdroj: spaceflight101.com
Pohonný systém
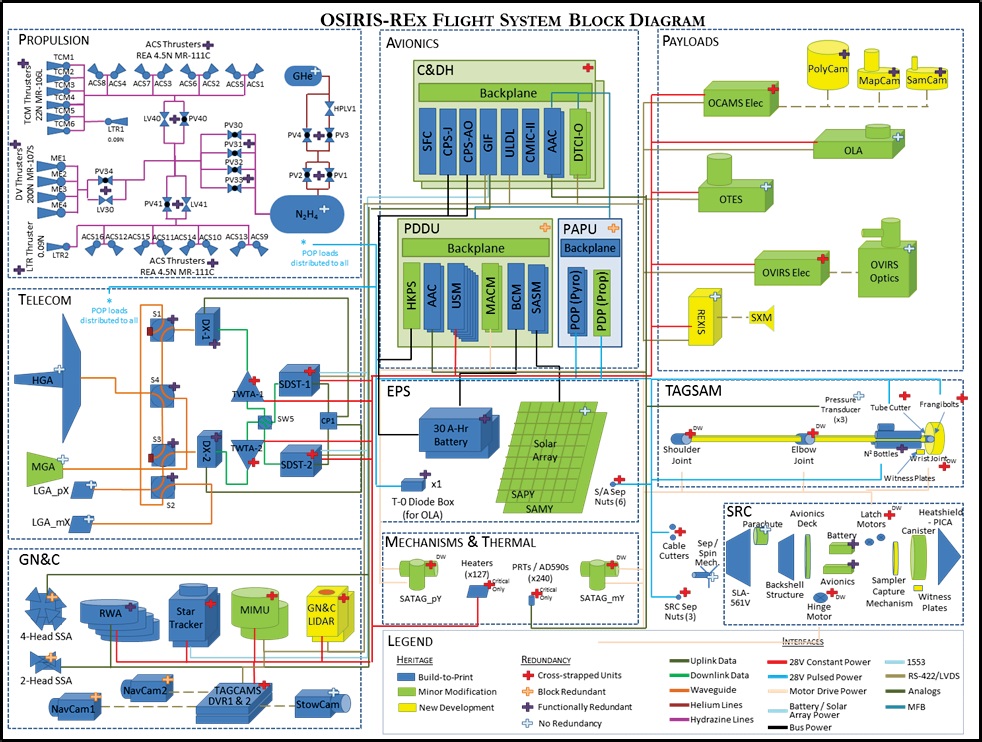
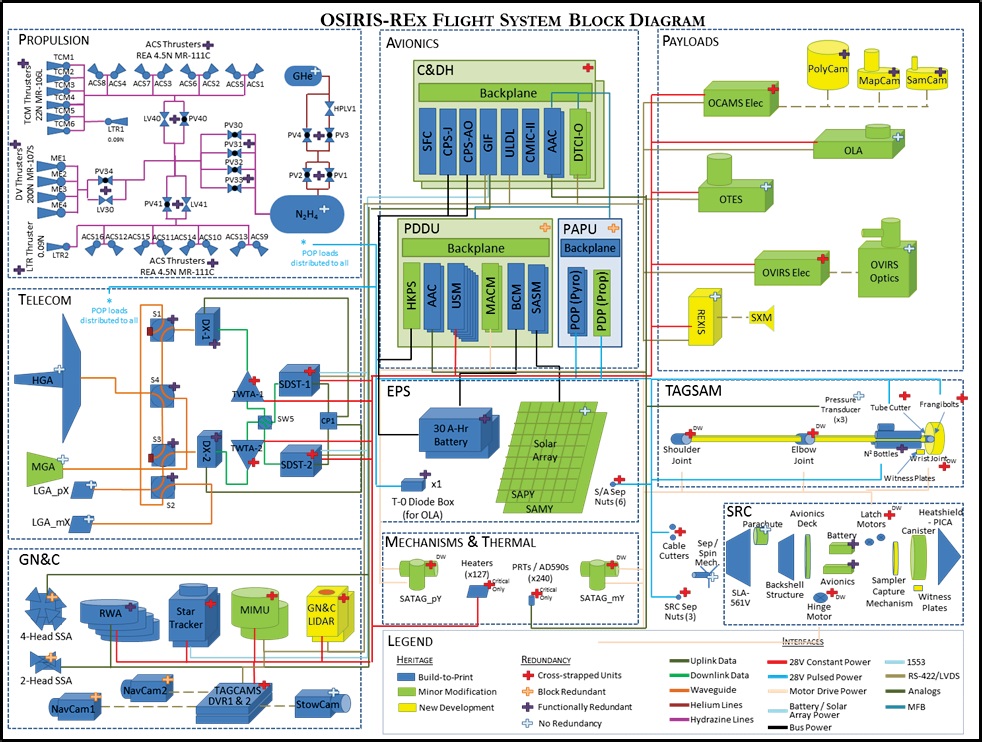
Konstrukce pohonného systému vychází ze zkušeností nasbíraných při stavbě sond MRO a MAVEN, ale některé systémy souvisí i se sondou Juno, která krouží kolem Jupiteru. Na sondě OSIRIS-REx najdeme celkem 28 různě velkých trysek, které můžeme rozdělit do čtyř skupin. Prvním z nich je svazek čtyř motorů s velkým tahem, které slouží jako hlavní motory. Do druhé skupiny patří šest trysek se středním tahem, dále je tu 16 motorů pro orientaci v prostoru a systém doplňují dva speciální motory s nízkým tahem pro velmi jemné manévry při odběru vzorků.

Zdroj: spaceflight101.com
Všechny motory spalují jeden typ paliva, kterým je hydrazin. Ten je uložený v jedné centrální nádrži. Je tedy jasné, že motory využívají jednosložkové palivo – fungují na principu rozkladu hydrazinu, který proudí přes horké kovové katalyzátory, čímž vzniká plyn o vysokém tlaku, který pak míří do samotné trysky. Jako katalyzátor se používají zrna hliníku pokrytá iridiem (S405, též LCH-202). Nádrž na hydrazin je uložena v centrálním válci sondy a je 150 centimetrů vysoká, přičemž její průměr dosahuje 124 centimetrů. To dává dohromady objem 1300 litrů. O výrobu nádrže se postarala kalifornská společnost ATK Aerospace. Stěny nádrže jsou tvořeny čistým titanem, což zabraňuje tomu, aby nádrž korodovala. Titan je navíc hodně pevný a proto i samotná nádrž přispívá ke strukturální pevnosti těla sondy.

Zdroj: spaceflight101.com
O tlakování nádrže s hydrazinem se stará helium, které je uložené v samostatné tlakové nádobě. Jedná se o typ COPV (composite overwrapped pressure vessel), což je zkratka, která je dnes dobře známá kvůli havárii rakety Falcon. I v tomto případě se jedná o tlakové nádrže ovinuté kompozitním materiálem. Průměr této tlakové nádoby je 42,4 cm a její výška je 75,2 cm, což vytváří vnitřní objem 80 litrů. Helium je zde uloženo pod tlakem 33 MPa, takže nádoba pojme 3,7 kg helia. Tlakovací médium je s nádrží na palivo spojeno pyroventily a regulátory tlaku, které mají zajistit, aby byl při práci motoru zachován konstantní tlak v nádrži. Nádrž bude po každém zážehu uzavřena, takže pohonný systém může využívat zbytkového tlaku, což je vhodné pro trysky se středním tahem.

Zdroj: spaceflight101.com
Na spodní části sondy najdeme čtveřici motorů MR-107S od firmy Aerojet Rocketdyne. Tyto motory pracují ve svazku a použijí se pro velké změny rychlosti – především pro zážehy, které navedou sondu na průlet kolem Země, nebo pro brzdící zážehy při příletu k asteroidu, nebo naopak pro odletový zážeh, který sondu navede k Zemi. Každý z těchto motorů má nominální tah 275 N, přičemž je možné jej přiškrtit až na 85 N, nebo mu naopak naložit až do tahu 360 N. Společně se šesti tryskami o normálním tahu má OSIRIS-REx celkový tah 1 100 N.
Motory MR-107S pracují s tlakem paliva 0,7 – 3,5 MPa při tlaku ve spalovací komoře 0,4 – 1,4 MPa. Motor pracuje se specifickým impulsem 225 – 236 sekund, přičemž každou sekundu vstříkne do spalovací komory 36 – 155 gramů paliva. Motor MR-107S má expanzní poměr 21,5 a váží 1,01 kg. Na délku měří 22 centimetrů a jeho průměr je 6,5 centimetru. Opakované použití tento motor nijak nepoškozuje – je certifikován na 30 300 pracovních cyklů.

Zdroj: spaceflight101.com
Šestice motorů MR-106L se stará o kontrolu nad orientací sondy během zážehů hlavních motorů a kromě toho se dají použít i pro korekční zážehy s menší změnou rychlosti. Řeč je například o drobných úpravách po zážezích hlavních motorů, které většinou potřebují lehké korekce. Dva z těchto motorů budou mít za úkol nasměrovat sondu pryč od povrchu asteroidu po odběru vzorků.
Každý motor MR-106L poskytuje nominální tah 22 N s možností regulace od 10 do 34 N. Motory pracují s tlakem paliva 590 kPa – 2,76 MPa, přičemž tlak v komoře může být 410 kPa – 1,34 MPa. Tyto motory s expanzním poměrem 60 mají specifický impuls 229 – 235 sekund a každou sekundu spálí 4,5 – 14,7 gramů paliva. Každý motor váží 500 gramů, na délku měří 18,2 cm a průměr trysky je 3,4 cm. Tyto motory zvládnou až 120 000 pracovních cyklů, přičemž zážehy mohou trvat až 4000 sekund, tedy skoro 66 minut nonstop.

Zdroj: spaceflight101.com
Pro stabilizaci sondy v prostoru a pro desaturaci gyroskopů slouží sondě OSIRIS-REx 16 motorů MR-111C, které pracují s malým tahem – jen 4,5 N. Tyto motory zvládnou tlak paliva 550 kPa – 2,76 Mpa a tlak v komoře může být 340 kPa – 1,21 Mpa. Specifický impuls kolísá mezi 215 a 229 sekundami, přičemž motor má expanzní poměr 74. Každou sekundu spálí až 2,4 gramu paliva, což je hodnota pro nejvyšší tlak vstupujícího paliva. Tyto motory mohou pracovat v kontinuálním, ale i pulsním režimu, přičemž minimální doba mezi dvěma pulsy je 15 milisekund. Celkem zvládnou až 420 000 pulsů, nebo 5000 sekund práce. Váha těchto motorů je 330 gramů, jsou 17 cm dlouhé a tryska má průměr 3,8 cm.
Posledním typem trysek jsou dva motory MR-401 s ultranízkým tahem. Použijí se především pro mimořádně přesné zážehy související s odběrem vzorků. Jejich technický návrh pochází od meteosondy GOES-R. Každý z těchto drobečků generuje tah 0,08 N při specifickém impulsu 170 sekund.
Elektrický systém

Zdroj: spaceflight101.com
O výrobu elektrické energie se na sondě OSIRIS-REx stará dvojice solárních panelů které jsou připojené ke spodnímu panelu konstrukce sondy. Po vyklopení dosahují panely rozpětí 6,2 metru, přičemž jejich aktivní plocha je 8,5 m2. Panely jsou pokryté solárními buňkami na bází gallia a arsenu, přičemž panely dodávají 1 226 – 3000 W elektrické energie v závislosti na vzdálenosti od Slunce. Panely jsou statické a neotáčejí se ze Sluncem – otočit se musí celá sonda. Ovládací systém ale může naklopit panely tak, aby tvořily tvar písmene Y. Toho se využije při odběru vzorků, aby se panely nepokryly zvířeným prachem.
Energie vyrobená solárními panely se ukládá do dvojice Li-Ion baterií s nábojem 30 ampérhodin. Baterie se budou hodit hlavně v době, kdy sonda bude v orientaci, kdy její panely nebudou mířit ke Slunci – například při odběru vzorků, nebo při motorických manévrech. Vyrobená energie míří do distribuční a řídící jednotky (Power Distribution and Drive Unit), kterou tvoří šest různých modulů.
Určení orientace a řízení
Zdroj: spaceflight101.com
Sonda OSIRIS-REx vyžaduje speciální systémy pro určení polohy, ale i navigační systémy, které kombinují tradiční komponenty s upraveným vybavením, které přijde ke slovu při práci v blízkosti asteroidu Bennu. Primárními zdroji, které se starají o určení orientace sondy, jsou dva sledovače hvězd, které jsou prověřené z minulých misí. Tyto přístroje pořizují každou sekundu mnoho snímků hvězdami posetého nebe ve viditelném spektru. Tyto snímky jsou následně analyzovány speciálními algoritmy, které porovnávají fotky s katalogem jasných hvězd. Díky tomu je možné vypočítat orientaci sondy v prostoru ve všech třech osách.
Záložním systémem jsou dvě inerciální jednotky IMU (Inertial Measurement Unit). Jedná se o modely s dlouhou historií, které využívají laserově kontrolované gyroskopy GG1320. Ty dokáží velmi přesně měřit rotaci sondy. Princip je jednoduchý – dva protiběžné laserové paprsky mají odlišné frekvence a rozdíl těchto frekvencí závisí na rychlosti rotace. Každá jednotka váží 4,5 kg a měří 23 × 17 cm, dokáže pracovat až do rychlosti otáčení 375°/sekundu a odchylka dosahuje jen 0,005°/hodinu. Systém si poradí i s radiací na nízké oběžné dráze Země i s přetížením až 25 G.
Zdroj: spaceflight101.com
Sonda disponuje i slunečními senzory, které hrají velmi důležitou roli v rámci bezpečnosti systému celého stroje. Právě na ně se sonda přepne, pokud z jakéhokoliv důvodu „spadne“ do safe modu. Sluneční senzory pak zaručí, že sonda bude stále vědět, kde je Slunce, aby k němu mohla mířit solárními panely. Tím bude zajištěna neustálá dodávka elektrické energie a pozemní týmy budou moci řešit případné problémy a návrat stroje do služby.
Na základě informací ze senzorů se řídící počítač rozhodne, jak je potřeba upravit orientaci. Pro větší změny poslouží výše zmíněné motory MR-111C s tahem 4,5 N. o drobnější korekce se postarají čtyři gyroskopy – tři slouží pro orientaci v každé ose a jeden je záložní. Při motorických manévrech je stabilita ve dvou osách zajišťována šesti motory MR-106L s tahem 22 N.
Stabilizační gyroskopy jsou roztáčeny elektromotory na různé rychlosti podle potřebných manévrů. Trysky se pak mohou použít pro pravidelnou desaturaci gyroskopů. Při tomto procesu mohou gyroskopy zpomalit a trysky tak protisměrně kompenzují tuto sílu.

Zdroj: spaceflight101.com
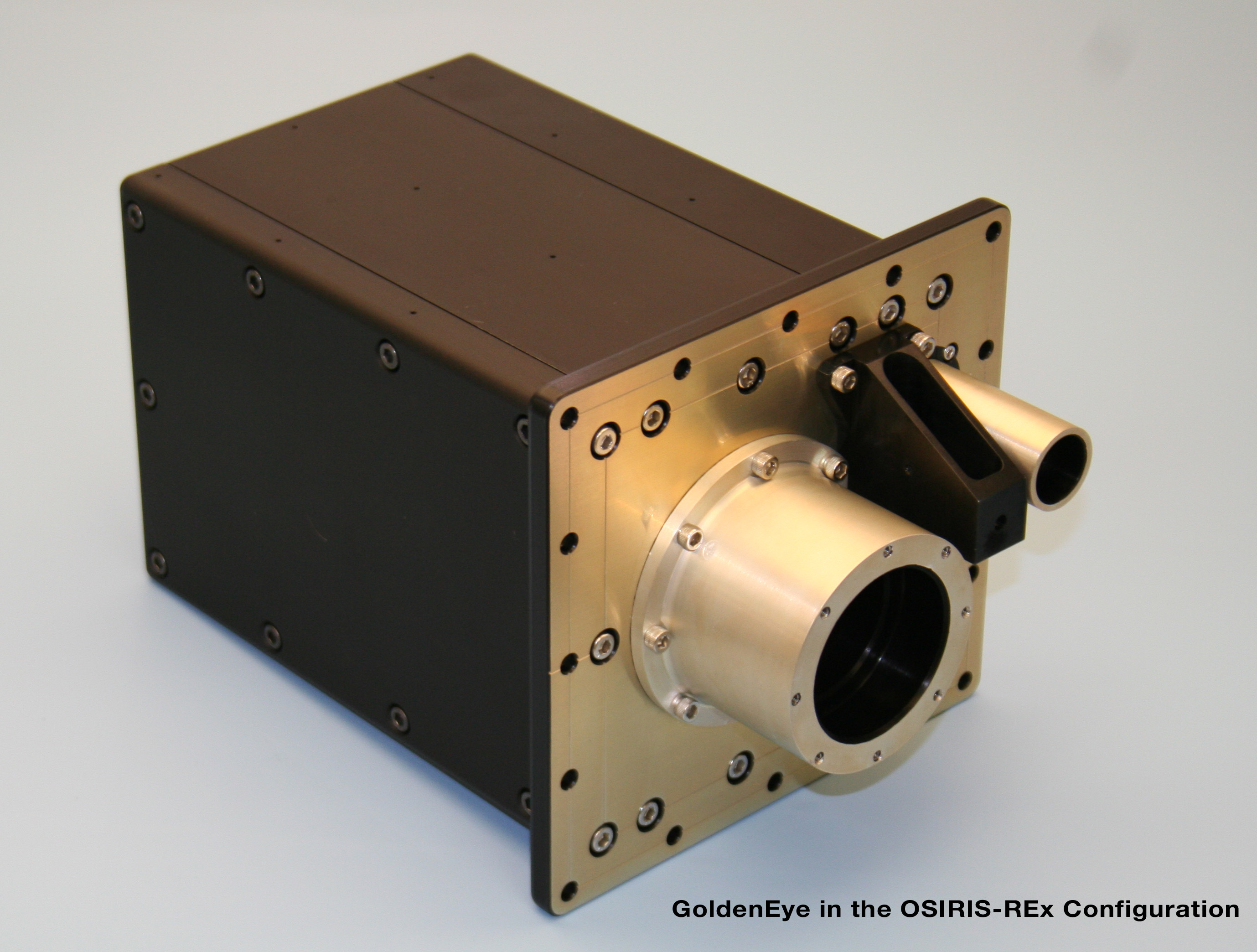
Pro orientaci v blízkosti asteroidu Bennu se ale budou používat i další systémy, které zajistí dodatečnou přesnost.Konkrétně se jedná o dvojici senzorů – navigační LIDAR a TAGCAMS společně s kamerovým systémem. Zkratku LIDAR ( Light Detection And Ranging) neslyšíme v souvislosti s kosmonautikou poprvé. Zjednodušeně řečeno jde o laserový radar – laserové pulsy se odráží od objektu a dopadají na senzor, který je zachytává. Senzor zaznamená hlavně čas, kdy puls dorazil, takže může vypočítat dráhu, kterou světlo urazilo a tím i vzdálenost sondy od povrchu. Jako bonus se navíc sbírají informace o tvaru objektu.
Navigační LIDAR na OSIRIS-REx využívá technologii 3D záblesků a o jeho výrobu se postarala firma ASC (Advanced Scientific Concepts Inc.). Celý systém měří jen 14 × 20,6 × 16,5 cm, snímač disponuje polem 128 × 128 obrazových bodů, které dokáží zaměřit až 30 snímků za sekundu. Díky tomu získá sonda v reálném čase přehled o navigačních datech ve všech třech rozměrech. Je jasné, že tato data poslouží centrálnímu počítači k dalšímu rozhodování.
Kamera váží 6,5 kg. Je schopna zaměřovat cíle až na vzdálenost tří kilometrů. Pracuje s infračerveným světlem, vydává laserové pulsy o vlnové délce 1064 nebo 1570 nanometrů a zaznamenává jejich odrazy pomocí indium-gallium-arsenových detektorů. Pro použití na sondě OSIRIS-REx dostala kamera dodatečnou radiační ochranu pro meziplanetární prostor, takže si poradí i s dávkami až 100 kRad (1000 Gray). Tento štít se na celkové hmotnosti podílí dvěma a půl kilogramy. LIDAR zvládne pracovat s přesností na 20 centimetrů.
Zdroj: spaceflight101.com/
Druhý systém se označuje jako TAGCAMS a skládá se ze tří kamer se širokým zorným polem a digitálního záznamníku videa. Dvě kamery mají za úkol snímkovat asteroid Bennu a hvězdy na pozadí během přibližovací fáze. Díky tomu poskytnou data pro optickou navigaci a jemné korekce dráhy. Třetí kamera bude mít za úkol sledovat přesun odebraných vzorků z asteroidu do návratového pouzdra.
Systém TAGCAMS byl vyvinut v Malin Space Science Systems, která vznikla ze společnosti ECAM Modular Spaceflight Imaging System. TAGCAMS používá tři kamerové hlavy C50 s čočkami pro středně široké zorné pole a data se ukládají na digitální rekordér DVR8. Každá kamera váží méně než 250 gramů a pořizuje snímky s rozlišením 2592 × 1944 pixelů. Kamery umožňují jak panchromatické snímkování bez flitrů, tak i barevné snímkování s použitím Bayerovy masky. Záznamník DVR má dočasnou paměť na 128 MB a stálé úložiště na 32 GB dat. Snímky jsou zpracovávány přímo v DVR, kde se z nich dělají ztrátové soubory ve formátu JPEG, ale využívá se i bezeztrátové Huffmannovo kódování. Pro videosoubory se používá klasická komprese h264. Navigační kamery dokáží spatřit až hvězdy 4. magnitudy dokonce i tehdy, kdy osvětlený asteroid zabírá polovinu zorného pole!
Řídící a datový systém
Zdroj: spaceflight101.com/
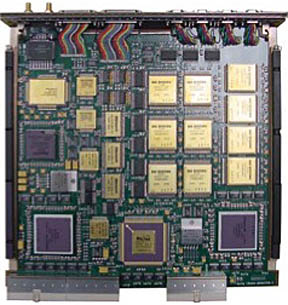
Jelikož je sonda postavena na základě sond MRO a MAVEN, je velmi pravděpodobné, že využívá řídícího počítače RAD750, ovšem neexistuje žádný dokument, který by to potvrzoval. Níže jsou uvedené údaje o RAD750, ale je potřeba k nim přistupovat s rezervou a počítat s tím, že možná je na sondě jiný počítač. RAD750 je jednokartový počítač vyráběný firmou BAE Systems, která sídli ve městě Manassas ve státe Virginia. Jeho procesor dokáže zvládnout i milionkrát silnější radiaci, než jaká by zabila člověka. Procesor RAD750 zvládá i dávky milion Rad,ostatní systémy mají toleranci zhruba 10× menší. Kromě toho neutrpí více než jednu závadu, která by potřebovala zásah ze Země za více než 15 let.
Počítač RAD 750 byl představen v roce 2001 a poprvé letěl do vesmíru o čtyři roky později na sondě Deep Impact. Jeho CPU obsahuje 10,4 milionu tranzistorů, pracuje na frekvenci 200 MHz a zpracovává při 400 MIPS. Procesor má k dispozici rychlou vyrovnávací paměť 2 × 32 kB a pokud si klient přeje, může být doplněn další modul, který přidá další 1 MB. RAD750 umí pracovat při teplotách -55°C až 125°C a přitom spotřebuje jen 10 wattů.
Systém pro zpracování dat přijímá údaje od vědeckých přístrojů a může k nim posílat pokyny. Data z navigačních senzorů jsou zpracována systémem DHS (Data Handling Systems), který je převede na pokyny pro řídící systém a pohonné jednotky. Řídící systém se stará i o udržování vhodných podmínek na sondě, přičemž jde hlavně o ovládání ohřívačů na základě tepelných senzorů, ale stará se i o hospodaření s elektrickou energií. Paměťové úložiště je přímo spojeno s komunikačním systémem pro odesílání dat na Zemi a zpětné přijímání pokynů.
Komunikace

Zdroj: spaceflight101.com
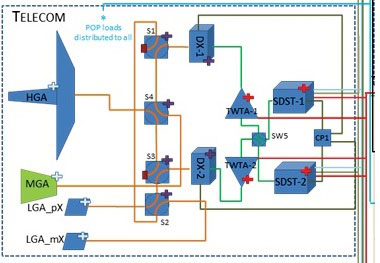
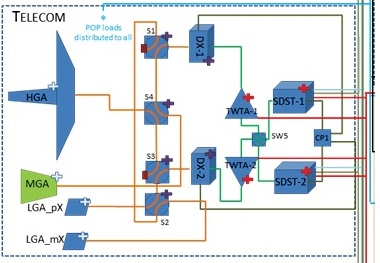
Systémy, které zajišťují komunikaci sondy OSIRIS-REx jsou přesnou kopií těch, které najdeme na sondě MAVEN. Jde o velkou směrovou vysokoziskovou anténu, jednu středněziskovou anténu a pár všesměrových nízkoziskových antén. Srdcem komunikačního systému je SDST (Small Deep Space Transponder) a zesilovač Traveling Wave Tube Amplifier. Na sondě jsou dva kusy z každého tohoto systému. Mezi jednotlivými kusy je možné se přepínat, takže existuje záloha pro případ selhání. Sonda využívá návrh SDST od americké JPL, který vznikl pro meziplanetární mise za účelem unifikace množství komunikačních funkcí na jediné jednotce – přijímač, detekce pokynu, modulace telemetrie, budiče, tónové generátory a řízení. Každá jednotka váží 3 kilogramy a umožňuje příjem pokynů v pásmu X a přenos dat v pásmech X a Ka.

Zdroj: spaceflight101.com
Data pro odesílání jsou nejprve poslána do SDST, kde se vygeneruje radiový signál, který je následně zesílen sto watty na Traveling Wave Tube Amplifier, odkud pak signál putuje k jednomu ze tří typů antén. Vysokozisková anténa (na diagramu HGA) poskytuje nejvyšší přenosovou rychlost, ale má úzké zorné pole, takže sonda musí být velmi přesně orientována vůči Zemi. Tato anténa má „talíř“ o průměr 210 centimetrů a duální reflektor v pásmu X, takže dosahuje rychlosti 914kbit/s. Samotná parabola je tvořena kevlarem se strukturou připomínající včelí plástve (voštinová konstrukce), tato středová vrstva je pokryta kompozitovými kryty. Jelikož je vysokozisková anténa připojena k sondě napevno, musí se pro její namíření k Zemi otáčet celá sonda.
Střednězisková anténa (na diagramu MGA) typu circular horn nabízí širší zorné pole než její vysokozisková kolegyně, ale daní za to je fakt, že dosahuje pouze zlomku její přenosové rychlosti. Použije se vždy, kdy kvůli orientaci sondy nebude možné využívat vysokoziskovou anténu a bude se přes ni posílat hlavně telemetrie. Pozemní týmy díky tomu budou mít dostatečný přehled o tom, v jakém stavu jsou jednotlivé systémy na sondě. Střednězisková anténa se použije i ve fázi odběru vzorků.
Zdroj: spaceflight101.com
Na závěr tu máme dvě nízkoziskové antény (na diagramu LGA) typu choked horn, každá má všesměrové pokrytí a poskytuje jen velmi nízkou přenosovou rychlost. Bude vysílat především nosný signál, když k Zemi nebude možné namířit ani vysokoziskovou ani středněziskovou anténu – jde hlavně o manévry spojené se zážehy motorů, které vyžadují specifickou orientaci sondy v prostoru, aby bylo dosaženo správného vektoru tahu. Vysílaný nosný signál je možné zachytit na Zemi a s využitím Dopplerova efektu sledovat, jak probíhá motorický manévr.
Další díl našeho seriálu Pohled pod kůži je u svého konce a já Vám děkuji, že jste dočetli až sem. Tento seriál je specifický tím, jak jde do hloubky technických konstrukcí sond. Na tomto místě je fér poznamenat, že žádný z dílů tohoto seriálu by nemohl vzniknout, pokud by na webu spaceflight101 nevycházely úžasné rekapitulační články, ze kterých při tvorbě tohoto seriálu vycházím. Současně chci jako vždy upozornit, že ačkoliv jsem se při překladu snažil co možná nejlépe přeložit všechny termíny, je možné, že jsem někde použil špatný, nebo nepřesný technický výraz. Budu rád, když mne na chybu upozorníte, abych ji mohl opravit.
Seriál Pohled pod kůži je nepravidelný, jeho sepsání není zrovna jednoduché a proto Vám nemohu říct, kdy se můžete těšit na další díl, ve kterém se podíváme na zoubek vědeckým přístrojům na palubě sondy OSIRIS-REx. Úplným závěrem bych Vám chtěl poděkovat za to, jak jste si tento seriál oblíbili. Velmi pozitivně mne překvapilo, jak krásná hvězdičková hodnocení měly minulé díly i to, jak jste se v komentářích ptali na to, kdy vyjde další díl tohoto seriálu. Opravdu si toho vážím a doufám, že Vás dnešní díl nezklamal a že se čekání vyplatilo.
Zdroje informací:
http://spaceflight101.com
Zdroje obrázků:
http://spaceflight101.com/…/sites/103/2016/08/osiris_bennu_gallery-1.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-8.jpg
http://spaceflight101.com/…/uploads/sites/103/2016/08/OSIRIS-REx-ATLO.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-9.jpg
http://spaceflight101.com/…/sites/103/2016/08/14-osiris_rex_proptank_lift_070_ccv0001.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-15.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-16.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-17.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-18.jpg
http://spaceflight101.com/…/sites/103/2016/08/27521088900_e89672fca0_k.jpg
http://spaceflight101.com/…/sites/103/2016/08/26771180803_b0aa051c90_o.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/structure-7.png
http://spaceflight101.com/…/sites/103/2016/08/GoldenEye-byASC3D.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/index.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/231457_orig.jpg
http://spaceflight101.com/…/sites/103/2015/08/osiris_hga_solararray_101215.jpg
http://spaceflight101.com/…/sites/103/2016/08/27307268591_d2cb4672ce_k.jpg
http://spaceflight101.com/osiris-rex/wp-content/uploads/sites/103/2016/08/osirisrex-21.jpg




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pohledy pod kůži jsou skvělý počin. Každý čtenář je jinak náročný na množství podrobností a tady si najde to své každý. Ať už mu stačí zběžný přehled, nebo si vybere oblasti, které ho zajímají více než jiné a nebo touží po detailech. Díky.
Díky moc za pochvalu!
Tak tomu říkám parádní práce! Díky!!
E111
Díky moc!
Tak to je super, srdce mi plesá. Díky moc.
Díky za krásnou pochvalu!
díky za podrobný článek! Jen škoda, že nevyšel dřív, když jsem stavěl repliku v KSP 🙂 – http://imgur.com/a/mD5hY
Pokud by měl někdo zájem, tak přidávám link na kompletní dokumentaci v CADu: https://dl.dropboxusercontent.com/u/16962811/Standard_Views_OSIRIS-REx_ITAR_Free.pdf
Díky za odkaz a posílám pochvalu za výtvor v KSP!
Skvelý článok… Úplne žasnem nad veľkosťou tých motorov..aký piďimiďi motorceky. Prosím vedel by mi hiekto v skratke objasniť čo je to ten špecifický impulz? Dakujeem
Díky za pochvalu. Specifický impuls udává zjednodušeně řečeno účinnost motoru ve vztahu ke spotřebě paliva. Detailnější vysvětlení v češtině najdete na wiki – https://cs.wikipedia.org/wiki/Specifick%C3%BD_impuls
Pro vzorek z asteroidu letí současně podruhé i Japonci, jejich sonda je též velice vyspělá a navíc nese výsadkové moduly. Sledování práce obou sond u asteroidů bude, jak doufám, opět zážitek jako v případě první japonské sondy.
Opravdu technická lahůdka, tahle sonda a článek je fakt dobrý. Díky.
Díky moc za pochvalu.
Dugi, aby som odpovedal na tvoju otázku z článku – nezklamal si a čakanie sa vyplatilo. Sú to proste úžasné informácie. Díky za ne!
Díky za pochvalu!
Perfekní článek, díky.
Díky za pochvalu.
Spousta práce, času… a super výsledek. To je za šest hvězd, díky!
Díky za článek. Jen drobné rýpnutí 🙂 Jednotky Rad by si zasloužily přepočítat na Gy neb Rad vychází ze soustavy CGS zatímco dnes používáme SI, takže bychom ji měli upřednostňovat. Nepoužívá se náhodou pro materiály se strukturou včelích pláství název voština? Ale tohle jsou jen detaily…
Díky za tipy, pokusím se to upravit.