Díky pokrokům v autonomii testovacích programů NASA připravuje základy pro jednu ze svých nejvyšších priorit – pátrání po stopách života a potenciálně obyvatelných tělesech ve Sluneční soustavě i mimo ni. Primárním cílem takového průzkumu jsou tělesa obsahující kapalnou vodu – třeba Jupiterův měsíc Europa nebo Saturnův Enceladus. První výpravy na tyto oceánské světy budou robotické a budou vyžadovat vysokou úroveň autonomie z důvodu výrazných zpoždění a výpadků komunikace se vzdálenou Zemí, drsných podmínek na povrchu a omezené životnosti baterií.
Technologie, které mohou umožnit sondám vyšší autonomii obecně spadají pod téma umělé inteligence (AI) a v posledních letech se rychle rozvíjejí. Mnoho takových technologií (například strojové učení, kauzální uvažování a generativní AI) bylo rozvíjeno institucemi mimo NASA. Sama agentura rozjela v roce 2018 program, který má využít těchto pokroků k realizaci budoucích misí k ledovým světům. Od té doby třeba financoval vývoj testovacích stanovišť OWLAT (Ocean Worlds Lander Autonomy Testbed) na kalifornské JPL a virtuální OceanWATERS (Ocean Worlds Autonomy Testbed for Exploration, Research, and Simulation) na Ames Research Center v kalifornském Silicon Valley.
NASA požádala o podání přihlášek do programu ARROW (Autonomous Robotics Research for Ocean Worlds) v roce 2020 a do programu COLDTech (Concepts for Ocean Worlds Life Detection Technology) v roce 2021. Bylo vybráno šest výzkumných týmů z univerzit a společností z celých Spojených států, které měly vyvíjet a demonstrovat autonomní řešení na platformách OWLAT a OceanWATERS. Tyto dvou- až tříleté projekty jsou nyní dokončeny a zabývaly se širokou škálou výzev v oblasti autonomie, kterým čelí potenciální mise na povrchu oceánského světa.
Zdroj: https://science.nasa.gov/
OWLAT
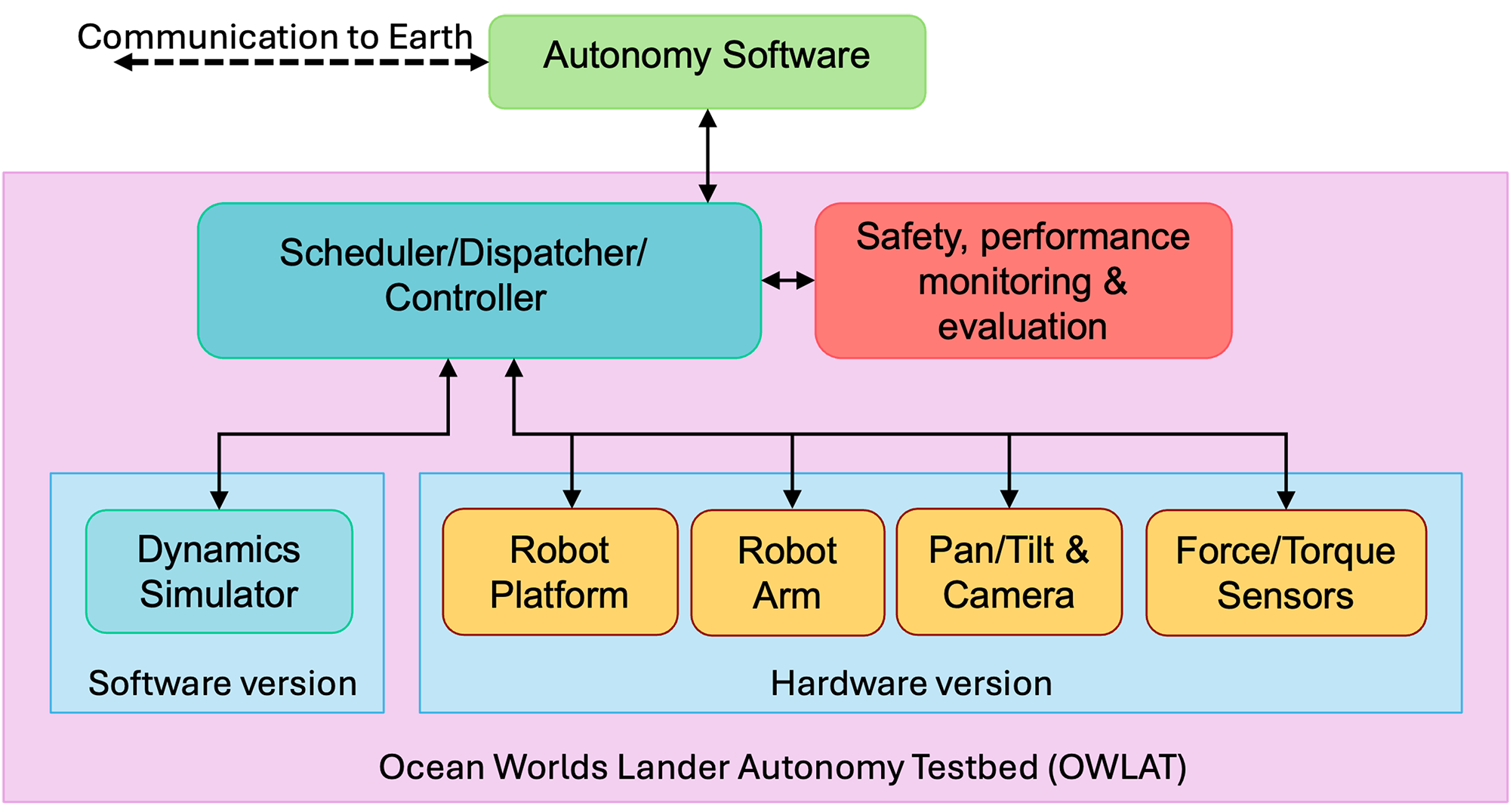
OWLAT je navržen tak, aby simuloval přistávací modul s robotickým ramenem pro vědeckou činnost na oceánském světě. Celá architektura OWLAT obsahuje hardwarové a softwarové komponenty vyobrazené na vpravo přiloženém obrázku. Každý z těchto komponentů je podrobněji představen níže.
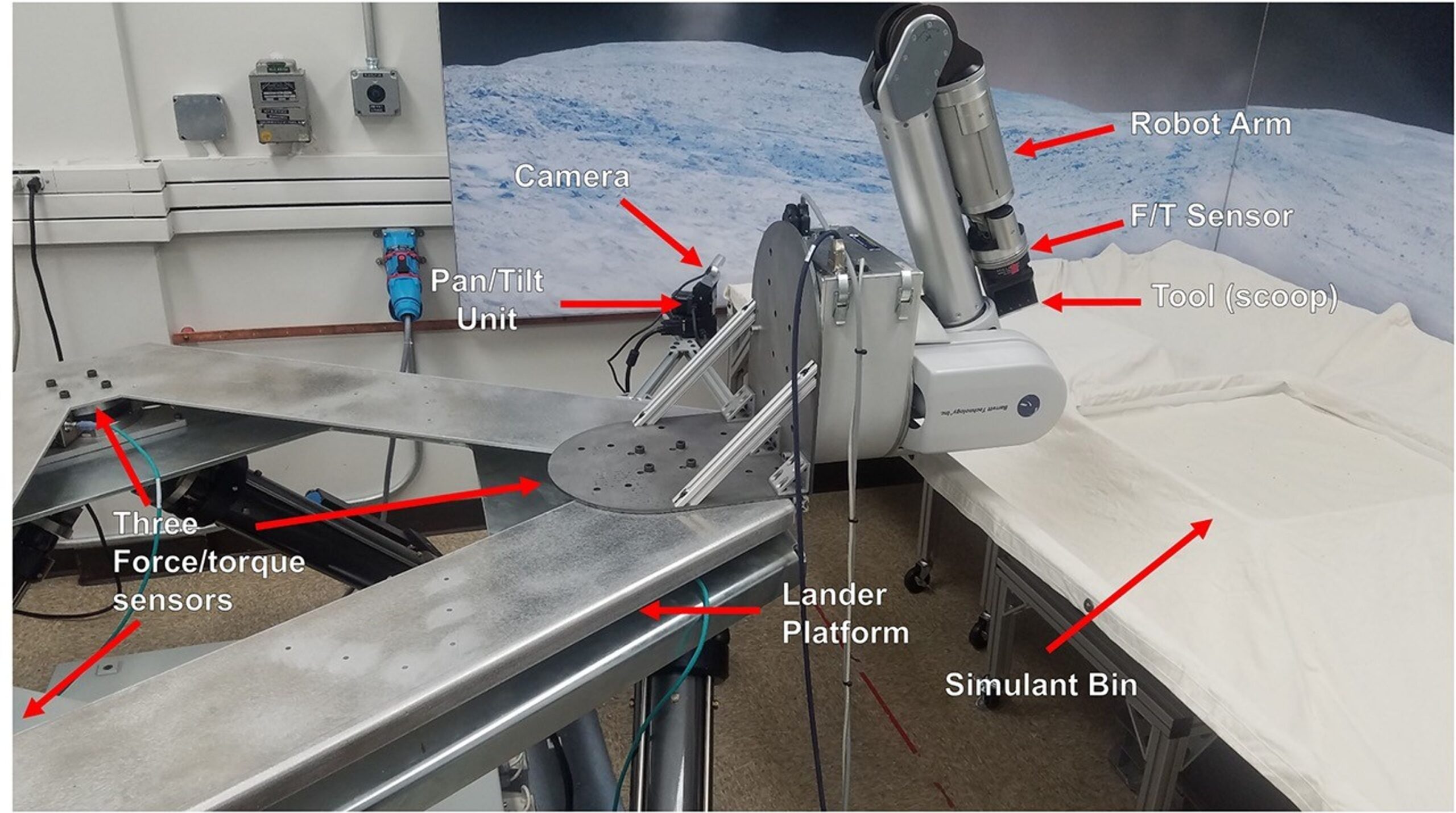
Hardwarová verze OWLAT je navržena, aby fyzicky simulovala pohyby landeru, který provádí činnosti v prostředí s nízkou gravitací s využitím hexapodálního paralelního mechanismu se šesti stupni volnosti. Sedmým stupněm volnosti je robotická paže připojená k landeru, která provádí odběry vzorků a další vědecké činnosti, které interagují s okolním prostředím. Ke snímání se používá kamera umístěná na otočné jednotce. Zkušební modul má také sadu palubních snímačů síly a točivého momentu, které měří pohyb a reakční síly při interakci modulu s okolím. Řídicí algoritmy implementované na testovacím stanovišti mu umožňují vykazovat dynamické chování, jako by se jednalo o lehké rameno na přistávacím modulu pracujícím v různých gravitačních prostředích.
Zdroj: https://assets.science.nasa.gov/
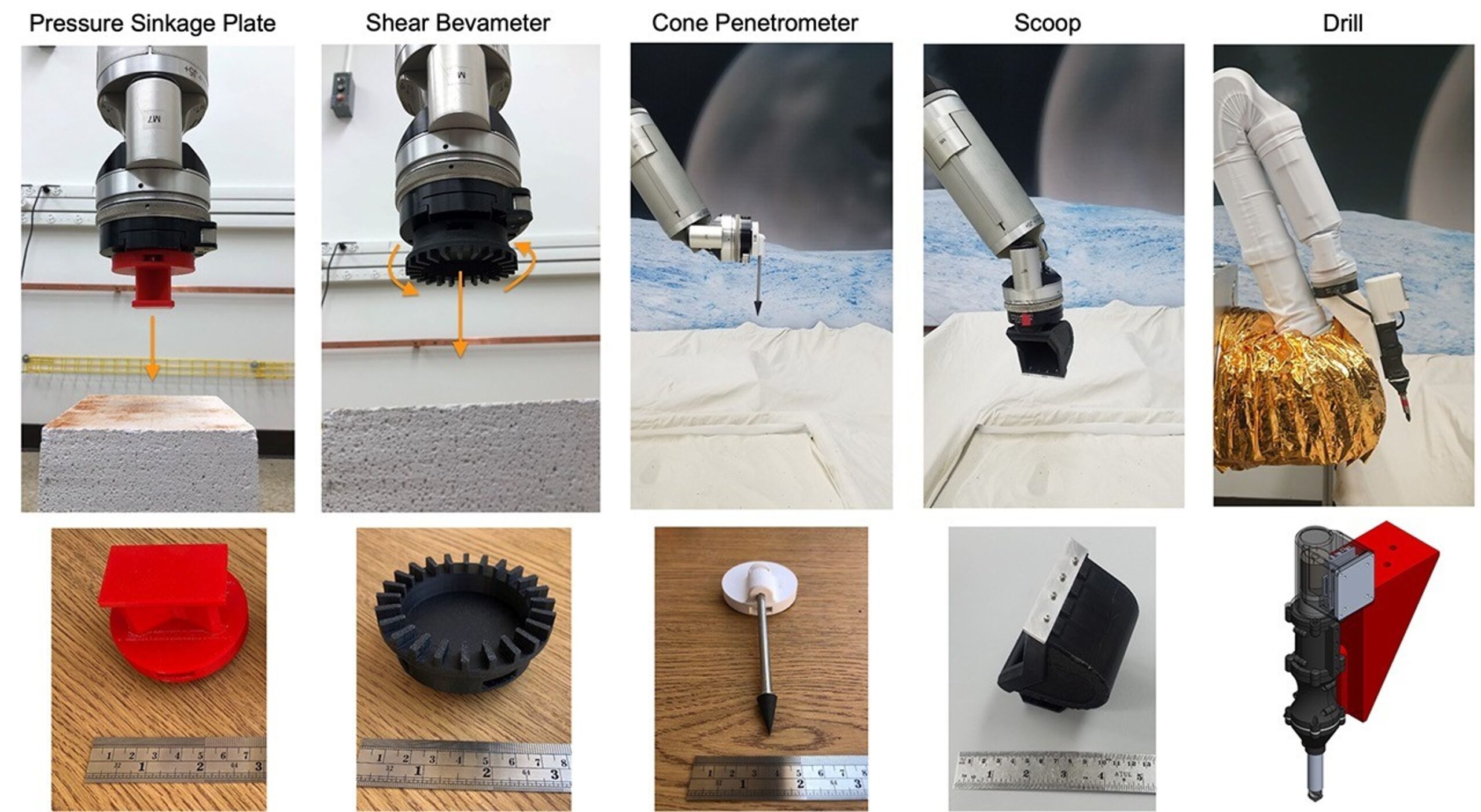
Tým také vyvinul soubor nástrojů a přístrojů (viz přiložený obrázek), které umožňují testy na zkušební platformě. Tyto rozličné nástroje mohou být připojeny na konec robotické paže díky mechanismu, který umožňuje jejich rychlé připojení i odpojení. Pracovní prostor testovacího pracoviště, kde se provádí odběr vzorků a další vědecké operace, zahrnuje prostředí navržené tak, aby reprezentovalo scénu a povrchový materiál simulující to, co se na oceánských světech dá předpokládat.
Zdroj: https://assets.science.nasa.gov/
Čistě softwarová verze OWLAT modeluje, vizualizuje a poskytuje telemetrii z dynamických simulací o vysoké přesnosti, které jsou založeny na Fyzikálním enginu DARTS (Dynamics And Real-Time Simulation), který vyvinuli v JPL. Jeho úkolem je napodobit chování fyzického testovacího stanoviště v reakci na pokyny a telemetrii, které jsou dodány autonomnímu softwaru. Na níže vloženém videu je zobrazena vizualizace z tohoto simulátoru.
Softwarový modul autonomie, který je na obrázku v začátku článku zobrazen nahoře, komunikuje s testovacím zařízením prostřednictvím rozhraní založeného na operačním systému robota (ROS), které vydává příkazy a přijímá telemetrii. Toto rozhraní je definováno jako identické s rozhraním systému OceanWATERS. Příkazy přijaté z modulu autonomie se zpracovávají prostřednictvím modulu dispečer/scheduler/kontrolér (modrý rámeček na prvním obrázku) a používají se k zadávání příkazů buď fyzické hardwarové verzi testovacího zařízení, nebo simulaci dynamiky (softwarové verzi) testovacího zařízení. Informace ze senzorů z provozu buď pouze softwarového, nebo fyzického testovacího zařízení jsou hlášeny zpět do modulu autonomie pomocí definovaného telemetrického rozhraní. Softwarový modul pro sledování a vyhodnocování bezpečnosti a výkonnosti (červený rámeček na horním obrázku) zajišťuje, aby se testovací zařízení udržovalo v provozních mezích. Jakékoli příkazy, které způsobují chování mimo meze, a anomálie jsou hlášeny jako závady do softwarového modulu autonomie.
OceanWATERS
Zdroj: https://assets.science.nasa.gov/
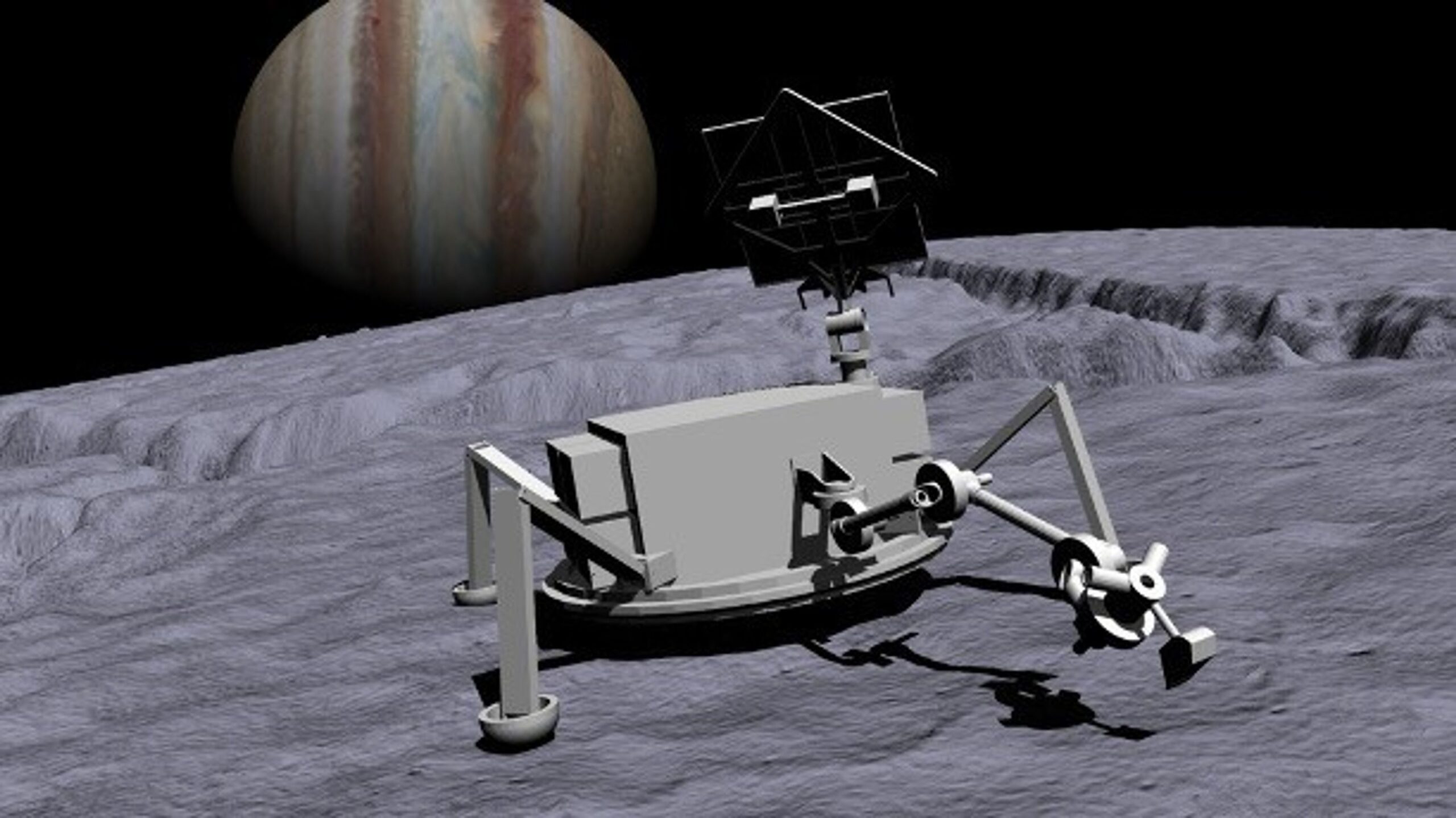
V době vzniku projektu OceanWATERS byl Jupiterův měsíc Europa při hledání života jasnou jedničkou planetární vědy. OceanWATERS je softwarový nástroj založený na systému ROS, který poskytuje vizuální a fyzikální simulaci robotického modulu na povrchu Europy (viz přiložený obrázek). OceanWATERS realisticky simuluje nebeskou sféru Europy a přímé i nepřímé sluneční záření. Protože zatím nemáme podrobné informace o povrchu Europy, mohou si uživatelé vybrat z modelů terénu s různými vlastnostmi povrchu a materiálů. Jedním z těchto modelů je digitální replika části pouště Atacama v Chile, což je oblast považovaná za potenciální pozemskou obdobu některých mimozemských povrchů.
Studie sondy Europa Lander od JPL z roku 2016, která je vodítkem pro vývoj OceanWATERS, popisuje planetární sondu, jejímž účelem je sběr podpovrchových vzorků regolitu/ledovce, jejich analýza pomocí palubních vědeckých přístrojů a přenos výsledků analýzy na Zemi. Lander, simulovaný v OceanWATERS, má anténní stožár, který se může otáčet a naklánět. Disponuje také stereokamerami a světlomety. Je vybaven i robotickým ramenem se šesti stupni volnosti a dvojicí zaměnitelných koncových nástavců – jeden je brusný a má kopat příkop a druhý je lopatka ke sběru povrchového materiálu. Lander čerpá energii ze simulovaného balíku opakovaně nenabitelných baterií. Odběr energie, stav baterií a zbývající životnost jsou pravidelně předpovídány s pomocí nástroje GSAP (Generic Software Architecture for Prognostics). Pokud je potřeba simulaci okořenit degradací a rozbitím subsystémů, či široým spektrem závad (třeba zamrzlým kloubem ramene nebo naopak přehřátou baterií), je možné tyto pokyny snadno implementovat uživatelem přímo do procesu simulace. Některé závady se ale mohou stát také samovolně během samotné simulace. Veškerá provozní a telemetrická data modulu jsou přístupná přes rozhraní, které mohou externí softwarové moduly autonomie používat k ovládání modulu a pochopení jeho stavu.
OceanWATERS a OWLAT sdílejí jednotné autonomní rozhraní založené na ROS. Balíček OceanWATERS obsahuje jeden základní autonomní modul, zařízení pro provádění plánů (autonomních specifikací) napsaných v PLan EXecution Interchange Language neboli PLEXIL. PLEXIL i GSAP jsou balíčky s otevřeným zdrojovým kódem vyvinuté v Ames Research Center a dostupné na GitHubu, stejně jako OceanWATERS.
Provoz mise může být simulován s pomocí OceanWATERS včetně vizuální inspekce místa přistání, prohledávání půdy za účelem zjištění její tvrdosti, hloubení příkopu a nabírání materiálu, který může být vyhozen nebo uložen do sběrné nádoby na vzorky. Komunikace se Zemí, analýza vzorků a další operace skutečné mise přistávacího modulu nejsou v současné době v systému OceanWATERS modelovány, s výjimkou odhadované spotřeby energie. Na níže vloženém videu je záznam fungování OceanWATERS, na kterém je spuštěn scénář mise se vzorky s použitím modelu terénu založeného na Atacamě.
Vzhledem ke vzdálenosti Země od oceánských světů a z toho plynoucímu komunikačnímu zpoždění by měl být planetární přistávací modul naprogramován alespoň s dostatečnými informacemi pro zahájení své mise. Budou však existovat specifické situační výzvy, které budou vyžadovat palubní inteligenci, jako je rozhodování o tom, kde přesně a jakým způsobem odebrat vzorky, řešení neočekávaných problémů a hardwarových závad a stanovení priorit činností na základě zbývající energie.
Výsledky
Všech šest výzkumných týmů, které byly financovány programy ARROW a COLDTech využívaly OceanWATERS k vývoji autonomních technologií landeru do oceánského světa a tři z těchto týmů pro svou činnost využilo také platformu OWLAT. Jejich výsledky těchto týmů byly publikovány v odborných článcích a vedly k vývoji softwaru, který může být v budoucnu použit nebo upraven pro skutečné mise do oceánských světů. Následující tabulka shrnuje výsledky projektů ARROW a COLDTech.
| Hlavní řešitel/ka | Jeho / její instituce | Projekt | Použivaná testovací platforma | Účel projektu | |
|---|---|---|---|---|---|
| Projekty ARROW | Jonathan Bohren | Honeybee Robotics | Stochastic PLEXIL (SPLEXIL) | OceanWATERS | Rozšíření systému PLEXIL o možnost stochastického rozhodování pomocí technik zpětnovazebního učení. |
| Pooyan Jamshidi | University of South Carolina | Resource Adaptive Software Purpose-Built for Extraordinary Robotic Research Yields (RASPBERRY SI) | OceanWATERS & OWLAT | Vyvinout softwarové algoritmy a nástroje pro identifikaci kořenových příčin poruch, kauzální ladění, kauzální optimalizaci a kauzální verifikaci. | |
| Projekty COLDTech | Eric Dixon | Lockheed Martin | Kauzální a zpětnovazební učení (CARL) pro COLDTech | OceanWATERS | Integrovat model lunárního ramene COLDarm (Cold Operable Lunar Deployable Arm) připraveného k misi do systému OceanWATERS a použít analýzu obrazu, kauzální uvažování a modely strojového učení k identifikaci a zmírnění hlavních příčin poruch, jako je hromadění ledu na koncovém efektoru ramene. |
| Jay McMahon | University of Colorado | Robustní průzkum s autonomnímpalubním vědeckým výzkumem, hodnocení podmíněných možností pro nepřetržitý dálkový vědecký výzkum (REASON-RECOURSE) | OceanWATERS | Použití automatizovaného plánování s formálními metodami pro maximalizaci vědeckého přínosu modulu při minimalizaci komunikace s pozemním týmem na Zemi. | |
| Melkior Ornik | U Illinois, Urbana-Champaign | aDaptive, ResIlient Learning-enabLed oceAn World AutonomY (DRILLAWAY) | OceanWATERS & OWLAT | Vývoj autonomní adaptace na nové terény a výběr činností nabírání na základě dostupných obrazových dat a omezených zkušeností přenesením postupu nabírání naučeného z testovacího prostředí s nízkou věrností do testovacího prostředí OWLAT s vysokou věrností. | |
| Joel Burdick | Caltech | Robustní, vysvětlitelná autonomie pro vědecké operace na ledovém měsíci (REASIMO) | OceanWATERS & OWLAT | Vyvinout autonomní 1) detekce a identifikace podmínek mimo normální stav a postupy pro zotavení z těchto podmínek a 2) výběr místa odběru vzorků. |
Poděkování
Část výzkumu prováděného v Jet Propulsion Laboratory Kalifornského technologického institutu byla provedena na základě smlouvy s Národním úřadem pro letectví a vesmír (80NM0018D0004). Část výzkumu provedená zaměstnanci společnosti KBR Wyle Services LLC v NASA Ames Research Center byla provedena na základě smlouvy s Národním úřadem pro letectví a vesmír (80ARC020D0010). Oba výzkumy byly financovány z programů ARROW a COLDTech Planetary Science Division.
Přeloženo z:
https://science.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/sites/default/files/thumbnails/image/nh-europa-lander-concept_0.jpg
https://assets.science.nasa.gov/…/Figure2_SoftwareArch_v2.png?w=3072&format=webp&fit=clip&crop=faces%2Cfocalpoint
https://assets.science.nasa.gov/…/Figure3_TestbedView.jpg?w=3072&format=webp&fit=clip&crop=faces%2Cfocalpoint
https://assets.science.nasa.gov/…/Figure4_OWLATTools.jpg?w=3072&format=webp&fit=clip&crop=faces%2Cfocalpoint
https://assets.science.nasa.gov/…/Figure7_OceanWATERS.jpg?w=3072&format=webp&fit=clip&crop=faces%2Cfocalpoint





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}