Dnes se opět vypravíme na Mars za americkým roverem Curiosity, který se má stále čile k světu a provádí celou řadu zajímavých vědeckých pozorování. Rover sice brázdí povrch Marsu už od roku 2012, ale stále je jeho přínos pro vědecký výzkum rudé planety nedocenitelný. Curiosity sice trápí degradace plášťů kol, ale to určitě neznamená, že nepokračuje ve své úžasné cestě. Abychom Vám poskytli informace z první ruky, budou následující slova patřit překladu anglického článku, který sepsala Emma Harris, postgraduální studentka Přírodovědného muzea v Londýně, zapojená do plánování úkolů marsovského roveru. Článek se týká plánování činnosti vozítka na 10. července roku 2024.
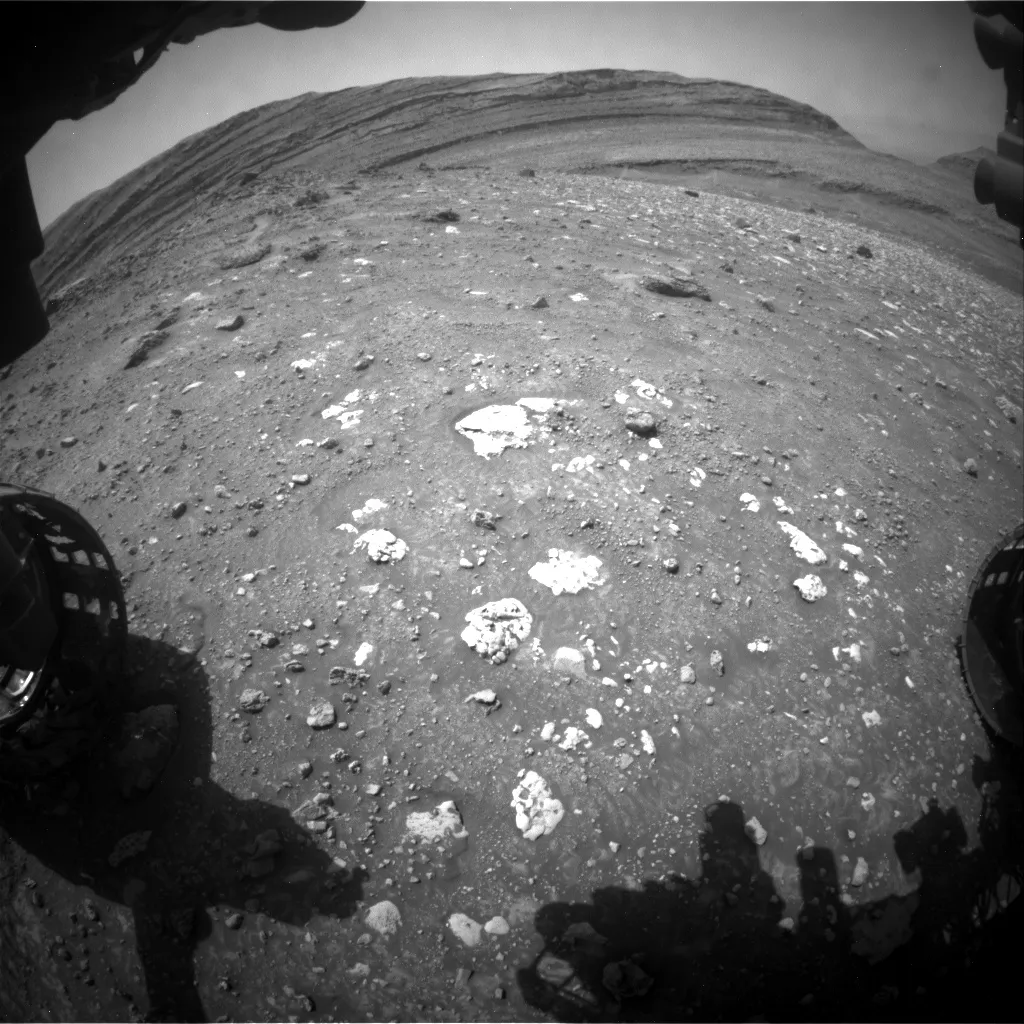
Rover Curiosity právě putuje přes kanál Gediz Vallis, protože, jak říká oblíbená kniha mého synovce, když to nemůžeme objet, musíme to projet! Nedávno jsme na chvíli rover zaparkovali, abychom navrtali kámen Mammoth Lakes (v překladu Mamutí jezera). Nyní jsme opět na cestě a zkoumáme skály a sutiny. Dneska vědecký tým naplánoval pro Curiosity dva soly činností, během kterých se vydáme dál kanálem Gediz Vallis a skrz něj. Při prvním solu se věnujeme téměř dvě hodiny naplánovaným vědeckým činnostem. Patří sem monitorování paluby roveru pomocí kamer Navcam a Mastcam tau, které měří prach v atmosféře.
Kamera MAHLI pořizuje detailní snímek průsmyku Donohue Pass, na který jsme se v předchozím plánu zaměřili pomocí přístroje ChemCam a snímků z kamery Mastcam. Kamera ChemCam pořídí měření skály v lokalitě s názvem „Negit Island“, která tým zaujala světlejší základnou a tmavší horní částí. Přístroj ChemCam také pořídí dvě dokumentační měření Gediz Vallis – jedno pro dokumentaci stěny kanálu Gediz Vallis, kterou vidíme před sebou, a druhé, které se bude zabývat skalami, které se nacházejí v lokalitě. Mastcam se také podívá na stěnu Gediz Vallis a bude pokračovat v megamozaice započaté v minulém plánu, kdy bylo pořízeno 54 snímků „kaňonu Stubblefield“. Dnes jsme naplánovali dalších 48 snímků, které mají zdokumentovat zbytek této oblasti s názvem „Echo Ridge“.
Kamera ChemCam provede pasivní pozorování zajímavého lokálního cíle ze suti, který se nazývá „Wishbone Lake“, a poté se k němu vydá na pětimetrovou vzdálenost. Jakmile dorazíme na místo, Curiosity pořídí několik snímků kamerami Navcam a snímek MARDI našeho levého předního kola. Po zaslouženém spánku si Curiosity při druhém řešení tohoto plánu automaticky vybere cíl pro měření složení v našem novém pracovním prostoru.
Přeloženo z:
https://science.nasa.gov/
Zdroje obrázků:
https://science.nasa.gov/…773631925edr-f1072610fhaz00302m-.jpg



{kind=link}