
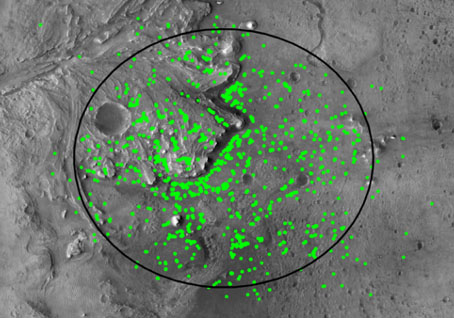
V dubnu jsme vydali článek, který se věnoval vývoji svinovacích fotovoltaických panelů. V podobném duchu se ponese i dnešní článek, ve kterém si posvítíme na jinou zajímavou technologii a její příběh. Marsovský kráter Jezero je plný nebezpečí – od kameny posetých svahů až po malé krátery. To z něj činí složité místo pro přistání. Přesto si sem v rámci mise Mars 2020 NASA dovolila poslat svůj rover Perseverance. Jeho přistání se nakonec navzdory složitým podmínkám podařilo a nezpochybnitelný podíl na tom měla i vylepšená navigační technologie. A právě té se budeme dnes věnovat.
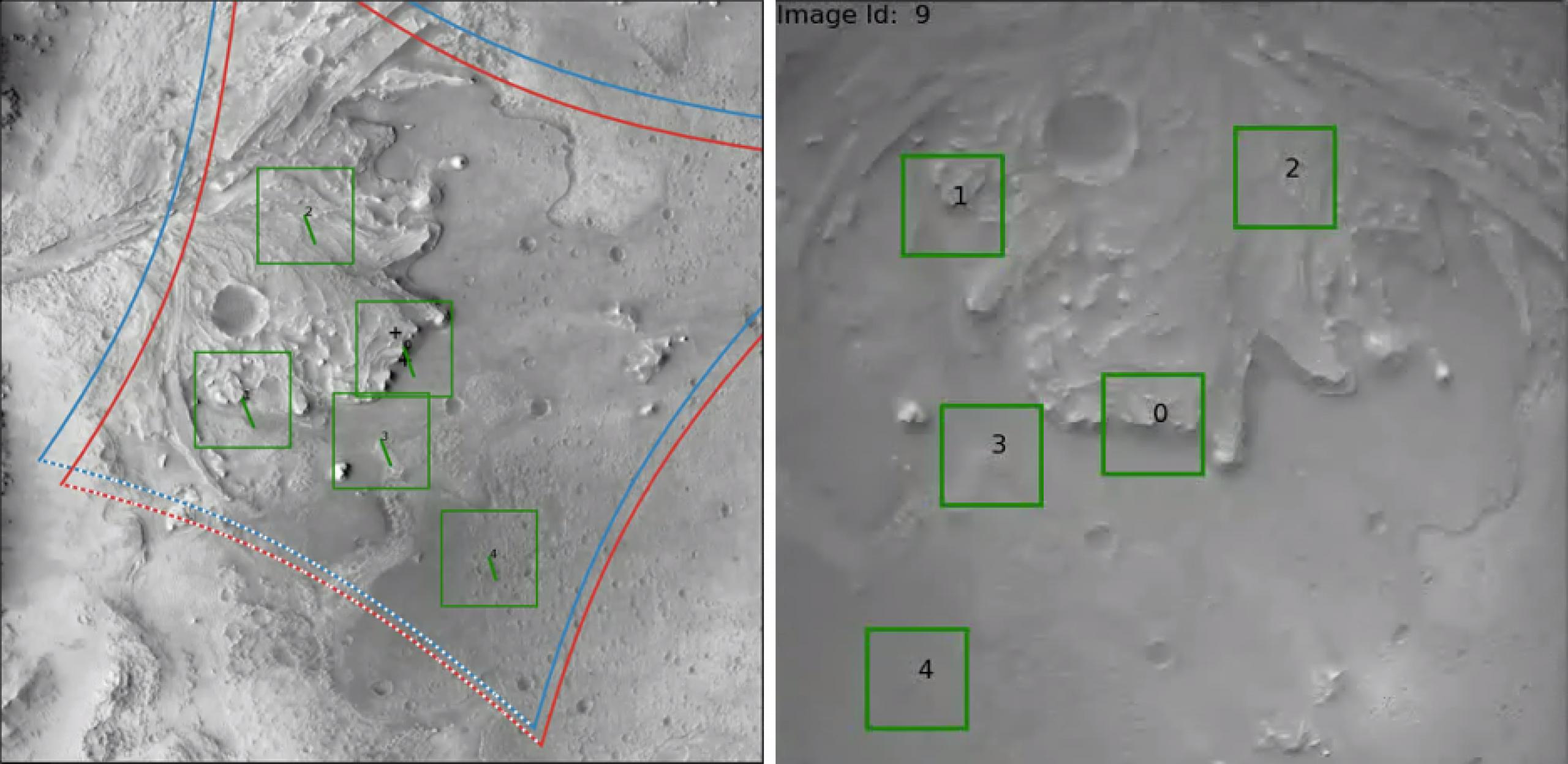
Systém TRN (Terrain Relative Navigation) je technologie vyvinutá agenturou NASA, která má umožnit vyšší přesnost přistání a pomoci sondám vyhnout se rizikům na povrchu. Systém TRN umožní průzkum cizích světů (jako je třeba Mars, či různé měsíce), na kterých bylo přistání až doposud považováno za příliš složité. Technologie TRN využívá kameru k porovnávání jejích snímků s palubními mapami. Systém pak automaticky během několika sekund vypočítá relativní pozici a výšku během sestupu. TRN navíc dokáže autonomně navést přistávající sondu mimo střední a vleká rizika v přistávací oblasti, čímž zajistí bezpečné přistání pro úspěšnou misi. Nyní, když systém TRN prokázal svou schopnost přesného přistání, pracují výzkumníci na tom, aby jeho technologie zakomponovali do několika dalších přistávacích a hrozby detekujících technologií pro mise k Měsíci a dál.
Zdroj: https://science.nasa.gov/
Během lunárního programu Apollo se mohli astronauti během sestupu podívat z okénka svého lunárního modulu, aby identifikovali povrchové útvary a alespoň zhruba určili svou pozici. Manuálně pak mohli vybrat přistávací místo, kde nebyla žádná nebezpečí jako jsou krátery, duny či kamenná pole. Pro bezpečné a úspěšné přistání robotických (a jednou i pilotovaných) misí na Marsu je ale zapotřebí přesnější a hlavně autonomní systém.
Za přistání s vysokou úrovní přesnosti je považováno takové, které proběhne ve vzdálenosti do 50 metrů od určeného místa. Před zavedením systém u TRN nebylo možné o přistání s vysokou přesností možné hovořit. Mise Mars 2020 byla první robotickou misí k Marsu, která využila navigaci založenou na optických datech pro bezpečné a přesné přistání. V rámci předešlých misí byla oblast odhadována z dat poskytovaných sítí Deep Space Network, tedy obřích rádiových antén. Odchylka této metody mohla činit až dva kilometry. Drsnější terén (jako ten v kráteru Jezero) poskytuje příležitost k analýze pestré nabídky vzorků. Mise bez schopnosti přesného přistání si tak musí vybrat v první řadě bezpečné přistávací místo a oželet tak riskantnější lokality s vyšší potenciálem k zajímavým objevům.
Zdroj: https://science.nasa.gov/
„Pokud bychom neměli TRN, pak by pravděpodobnost úspěšného přistání v kráteru Jezero byla mezi 80 a 85 %. Ovšem s TRN se pravděpodobnost zvýšila na 99 %,“ popisuje Swati Mohan vedoucí týmu zodpovědného za řízení navigaci a provoz roveru Perseverance v JPL. Ve výšce 4,2 kilometru nad povrchem Marsu začala palubní kamera systému TRN pořizovat snímky terénu v reálném čase. Během deseti sekund pak byly analyzovány povrchové útvary, které se shodovaly s uloženými mapovými podklady. Sonda tak získala představu o své pozici – skoro jako když si v neznámém terénu zapnete navigační program. Díky systému TRN se u mise Mars 2020 podařilo zlepšit přesnost odhadu místa přistání z odchylky 3,2 kilometru na pouze 40 metrů a méně.

Zdroj: https://upload.wikimedia.org/
Díky integraci systému TRN mohla si přistávající sonda vybírat z různých oblastí. Jakmile byl vypočítán odhad pozice v prostoru, mohl systém TRN vybrat nejbezpečnější místo přistání v cílové přistávací oblasti a použít malé množství pohonných látek v nádržích ke změně směru, aby se sonda vyhnula rizikovým místům. Čím více má sonda pohonných látek, tím větší úpravy dráhy si může dovolit a tím více přistávacích možností má k dispozici. Tento přístup s několika možnými místy přistání se výrazně liší od postupu, kdy rover dosedne do bezpečné oblasti a pak teprve po vlastní ose dojede do vědecky zajímavého místa. Nový postup umožňuje vozítku přistát přímo v cílové oblasti. Jednoduchý a levný design TRN je pro mise přínosný nejen z hlediska funkčnosti, ale i z pohledu energie a objemu. TRN má jen dvě části – kameru a počítač. Ačkoliv počítač potřebuje uchovávat fotky, zpracovávat je, provádět výpočty odhadu pozice a doporučení ke změnám dráhy, má jen malou spotřebu. Díky tomu je možné alokovat více energie dalším funkčním systémům a užitečnému vybavení.
Před rokem 2014: Počátek a raný vývoj
Když vědci zúžili seznam cílových lokalit, ve kterých se měly odebrat cenné vzorky, ukázalo se, že velká část těch nejzajímavějších míst měla nebezpečný terén, do kterého by se roveru složitě přistávalo. Experti ze střediska JPL tak vyhodnotili, že je tu kritická nutnost zajištění přesného přistání. přišli proto s konceptem, který dnes známe jako TRN. V průběhu dalších let byl koncept rozvíjen díky různým finančním zdrojům z rozličných programů NASA.

Zdroj: https://science.nasa.gov/
2013 – 2014: Letová demonstrace
V roce 2014 byly v rámci vývoje objednány dva lety při suborbitálních skocích. TRN byl testován na platformě ADAPT (Autonomous Descent and Ascent Powered-flight Testbed) na stroji Xombie od firmy Masten Space Systems v Mohavské poušti. Během sestupové fáze systém TRN úspěšně naváděl Xombie tím, že identifikoval terénní útvary a poskytoval údaje o relativní pozici vůči cílové přistávací oblasti.

Zdroj: https://www.nasa.gov/
2015 – 2017: Zrání a růst technologie
V rámci programu přelomových technologií GCD (Game Changing Development) se systém TRN dočkal dalšího vývoje jakožto součást projektu Intelligent Landing System. V této fázi byly zlepšeny jeho schopnosti pro bezpečné přistání potenciální budoucí mise, která by mohla přistát na Jupiterově měsíci Europa. V roce 2017 pak byl systém TRN opětovně demonstrován na suborbitálním nosiči firmy Masten Space Systems – jen místo stroje Xombie byl použit Xodiac. Tyto testy probíhaly v rámci programu COBALT (CoOperative Blending of Autonomous Landing Technologies), který byl zaměřen na autonomní přistávací technologie.
2018: Komercionalizace
Ředitelství technologií kosmických misí udělilo společnostem Astrobotic Technology a Blue Origin dva kontrakty na vývoj technologií souvisejících s TRN za účelem vývoje aplikace TRN pro lunární mise.

Zdroj: https://www.nasa.gov/
2019 – 2020: Demonstrace technologie
Ředitelství technologií kosmických misí podpořilo další rozvoj systému TRN včetně několika zhodnocení návrhu, dodatečných testů na vrtulníku v roce 2019 nad Údolím smrti, integrace softwaru, algoritmů a senzorů do jediného systému před startem mise Mars 2020.
S tím, jak se systém TRN vyvíjel, byl postupně integrován do dalších projektů řady SPLICE (Safe & Precise Landing – Integrated Capabilities Evolution). Tam byl systém TRN zařazen mezi další technologie, které souvisí s bezpečným přistáváním a vyhýbáním se rizikům. V roce 2019 byl TRN v rámci projektu SPLICE opět testován na suborbitálním nosiči Xodiac firmy Masten. Šlo o kriticky důležitý krok vstříc následujícím letovým testům v letech 2020 a 2021 na nosiči New Shepard firmy Blue Origin. V rámci výše zmíněného programu GCD navíc začalo financování programů k vytvoření lunárních elevačních map, klasických map povrchových útvarů, modelování a celkové validace. Z těchto dat pak může systém TRN čerpat informace o tom, kam napovrch Měsíce stroj míří a zda mu v daném místě nehrozí nebezpečí. V roce 2020 dostala firma Intuitive Machines kontrakt od programu Tipping Point spojený se zpracováním snímků a map pro TRN.
Nasazení na Marsu: Mars 2020
Systém TRN se postaral o kriticky důležitou schopnost v rámci mise Mars 2020, když umožnil bezpečné přistání v preferované vědecky cenné lokalitě, aby byly splněny požadavky mise. Hlavní úkoly roveru Perseverance souvisí se studiem geologického prostředí v okolí místa přistání, hledáním stop dávného mikrobiálního života a sběrem vzácných vzorků pro jejich možnou budoucí dopravu na Zemi. Studium marsovského prostředí a obyvatelnosti dále rozšíří znalosti pro budoucí pilotované mise k Marsu. Na palubě Persverance najdeme nejméně 13 dalších technologií financovaných Ředitelstvím technologií kosmických misí včetně MOXIE, MEDLI2 a robotické paže.
Zdroj: https://www.nasa.gov/
Komerční nasazení na Měsíci: Astrobotic Technology a Blue Origin
Firma Astrobotic spolupracuje s JPL v rámci programu Tipping Point na integraci částí vizuálního systému z mise Mars 2020 do komerčního systému OPAL pro použití na Měsíci. Mapy jsou pro úspěch důležitých lunárních misí. Lunární mapy pro TRN navíc pokrývají větší území než v případě Marsu, což je dáno odlišnou sestupovou dráhou. Rozsáhlé stíny v oblasti pólů, kam mají dosedat budoucí mise, představují další výzvy. Řešení firmy Astrobotic integruje do jediného systému všechny součásti hardwaru a softwaru, ale i nástroje pro 3D modelování terénu a simulaci osvětlení v reálném čase založenou na fyzikálních základech, což poslouží k validaci přesnosti map TRN pro přesné přistání na Měsíci. OPAL by měl dokončit svou fázi technologické demonstrace na misi Peregrine Mission 1. Firma Astrobotic chce systém TRN využít i k podpoře přistání většího landeru Griffin s vozítkem VIPER. Obě zmíněná přistání proběhnou v rámci programu CLPS.

Zdroj: https://www.nasa.gov/
Společnost Blue Origin navázala spolupráci s JPL a Johnsonovým střediskem, v rámci které mají dále dozrát klíčové technologie pro bezpečné a přesné přistání lunárních misí v rámci programu Tipping Point. V rámci tohoto kontraktu už dozrálo několik sestupových a přistávacích senzorů od NASA včetně TRN a součástí byly i demonstrační lety na suborbitálním nosiči New Shepard. Řešení TRN od Blue Origin má prokázat přistávací schopnosti nezbytné k obohacení lunárních misí a vytvořit nové komerční příležitosti k planetárnímu průzkumu.
Budoucí možnosti nasazení: Planetární průzkum
TRN je v rámci programu přelomových technologií GCD (Game Changing Development) součástí řady ILS (Intelligent Landing System), které by mohly najít uplatnění na budoucích misích k jupiterově měsíci Europa. Na rozdíl od Marsu či Měsíce nemáme žádné snímky povrchu Europy v dostatečně vysokém rozlišení, takže samotné senzory vizuální navigace by nebyly dostačující. Navíc sonda přistávající na Europě by čelila nejen terénním nebezpečím, ale i prostředí s vysokou radiací a limitovaným palubním zdrojům. Za tímto účelem ILS kombinuje několik přesných navigačních, přistávacích a nebezpečí detekujících technologií, které jsou navrženy tak, aby umožnily bezpečné přistání na Europě. Spojení TRN s dalšími technologiemi by sondě dalo možnost dále snížit nebezpečí spojené s terénními riziky, zatímco by systém pořizoval snímky povrchu a určoval rychlost sondy. ILS by se dal využít i pro vytvoření elevačních map povrchu, což by se dalo využít i u budoucích misí.
Projekt GCD SPLICE využívá TRN společně s dalšími technologiemi pro bezpečné a přesné přistání landerů, což by se dalo využít pro budoucí robotické i pilotované landery na Měsíc, Mars i další tělesa. Zmíněné technologie obnáší senzory lidaru s vysokým rozlišením, výkonné výpočetní kapacity, pokročilé algoritmy, které společně umožní landeru detekovat i malé překážky o velikosti cca 30 cm (+/- rozměr basketbalového míče) během sestupu a to i v případě neosvětlených či zastíněných terénů, kde kamery nemohou pořizovat snímky. Díky spolupráci v sadě senzorů chce projekt SPLICE umožnit ještě větší úpravy průběhu přistání na budoucích misích pro dosažení bezpečného přistání v ještě náročnějších terénech, které mají ještě vyšší vědecký a průzkumný potenciál.
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://science.nasa.gov/…/public/thumbnails/image/TRN-3.jpg?itok=e2GzDkNw
https://science.nasa.gov/…/public/thumbnails/image/TRN-6.png?itok=9e-nAOOQ
https://science.nasa.gov/…/background_image_file_size/public/thumbnails/image/TRN-7.png
https://upload.wikimedia.org/…/PIA24319-MarsPerseveranceRover-TouchDown-20201216.jpg
https://science.nasa.gov/…/background_image_file_size/public/thumbnails/image/TRN-1.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/astrobotic_1.jpeg
https://www.nasa.gov/sites/default/files/thumbnails/image/jpegpia23265.jpg
https://www.nasa.gov/…/image/pia24265_-_edl_milestones_unannotated.png
https://www.nasa.gov/…/image/nasa_team_with_booster_post_p11_blue_pic_2.jpg






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ahoj, uplně drobnost…
„Marsovský kráter jezero je plný nebezpečí“
Jezero je jeho jméno, předpokládám má být velkým.
Děkuji 🙂
R.
Pardon, mělo být jen pro autora, prosím ideálně smazat…
Děkuji…
R.
Díky za upozornění, překlep opraven. A klidně to tu může zůstat, nic se nestalo. Ještě jednou díky. 😉
Díky moc za parádny článek.
Rádo se stalo. Díky za pochvalu.