
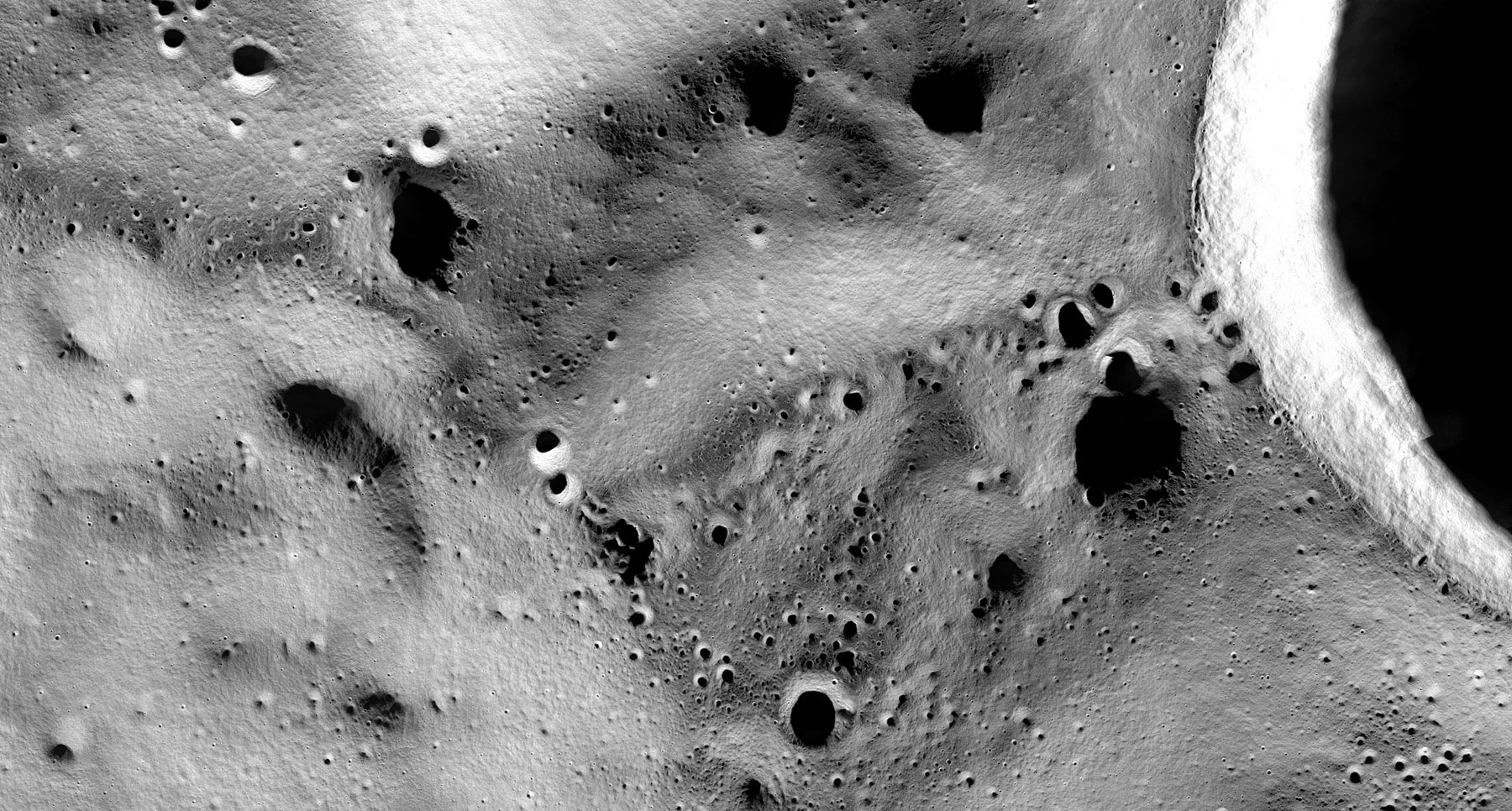
Koncem roku 2022 NASA vyšle vstříc jižnímu pólu Měsíce experiment pro těžbu ledu, který bude připojený k robotickému landeru. Ten by měl přistát na hřebenu nepříliš vzdáleném od kráteru Shackleton. Tuto lokalitu pečlivě několik měsíců vybíral tým inženýrů a vědců. NASA a firma Intuitive Machines společně oznámily výsledné rozhodnutí 3. listopadu. Data z amerických sond, které obíhají kolem Měsíce naznačují, že oblast zvaná Spojující hřeben Shacleton (Shackleton connecting ridge) by mohla obsahovat podpovrchový led. V této lokalitě je navíc dostatečné množství světla, aby mohlo být zajištěno napájení landeru po dobu zhruba desetidenní mise. Výhodou je také přímý výhled na Zemi pro nerušenou komunikaci. A aby toho nebylo málo, vybrané místo je blízko kráteru, který je ideální pro robotický průzkum.
Zdroj: https://www.nasa.gov/
Všechny tyto podmínky nabízí nejvyšší pravděpodobnost úspěchu tří technologických demonstrátorů, které budou na palubě. Jde o zařízení PRIME-1 (Polar Resources Ice-Mining Experiment-1) tvořené vrtačkou a dvojicí hmotnostních spektrometrů od NASA, dále o systém pro vytvoření 4G/LTE komunikační sítě od firmy Nokia of America Corporation a třetí systém představuje Micro-Nova – malý robot, který se uvolní od landeru a poskakováním se přesune jinam. Za jeho vývojem stojí firma Intuitive Machines.
„PRIME-1 bude trvale připojen k landeru Nova-C od firmy Intuitive Machines. Najít oblast, kde bychom mohli najít v hloubce do jednoho metru pod povrchem vodní led, bylo náročné,“ vzpomíná Jackie Quinn, projektová manažerka PRIME-1 z Kennedyho střediska na Floridě a dodává: „Ačkoliv je tu dost slunečního světla pro napájení nákladu, povrch se až příliš ohřívá na to, aby se v dosahu PRIME-1 udržel led. Vydali jsme se tedy zlatou střední cestu. Hledali jsme místo, kam dopadá právě tolik slunečního světla, aby byly splněny požadavky mise, ale zároveň to bylo bezpečné místo pro přistání s dobrou komunikací se Zemí.“

Zdroj: https://www.nasa.gov/
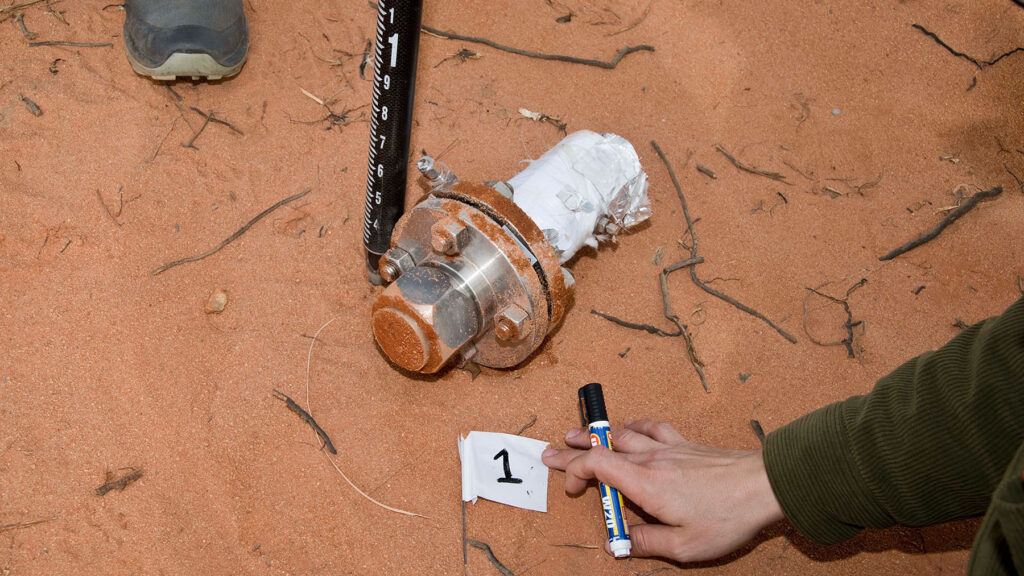
Při závěrečném výběru přistávací oblasti velmi pomohly mapy možností těžení ledu, které vytvořili experti z NASA, Arizona State University, Johns Hopkins Applied Physics Lab, Nokia a Intuitive Machines. Využili přitom data z dálkového průzkumu Měsíce. Po přistání se vrtačka přístroje PRIME-1 (známá také jako TRIDENT – The Regolith Ice Drill for Exploring New Terrain) pokusí zavrtat do hloubky zhruba 90 centimetrů. Během vrtání odebere vzorky lunárního regolitu, které vyloží na povrch pro analýzu obsahu vody. Další přístroj, který je součástí zařízení PRIME-1 je hmotnostní spektrometr MSolo. Právě ten bude mít za úkol měřit unikající plyny z materiálu, který TRIDENT vytěží.
PRIME-1 bude první praktickou demonstrací procesu nalezení a vytěžení zdroje na Měsíci. Pokroky těchto technologií jsou nezbytné pro založení stabilní a dlouhodobé lidské přítomnosti v hlubším vesmíru, kam patří i Měsíc. I samotný provoz zařízení a vrtání do lunárního povrchu navíc přinese cenná data inženýrům na příštích lunárních misích jako je třeba rover VIPER, který má u jižního pólu Měsíce přistát v koncem roku 2023.
Zdroj: https://www.esa.int
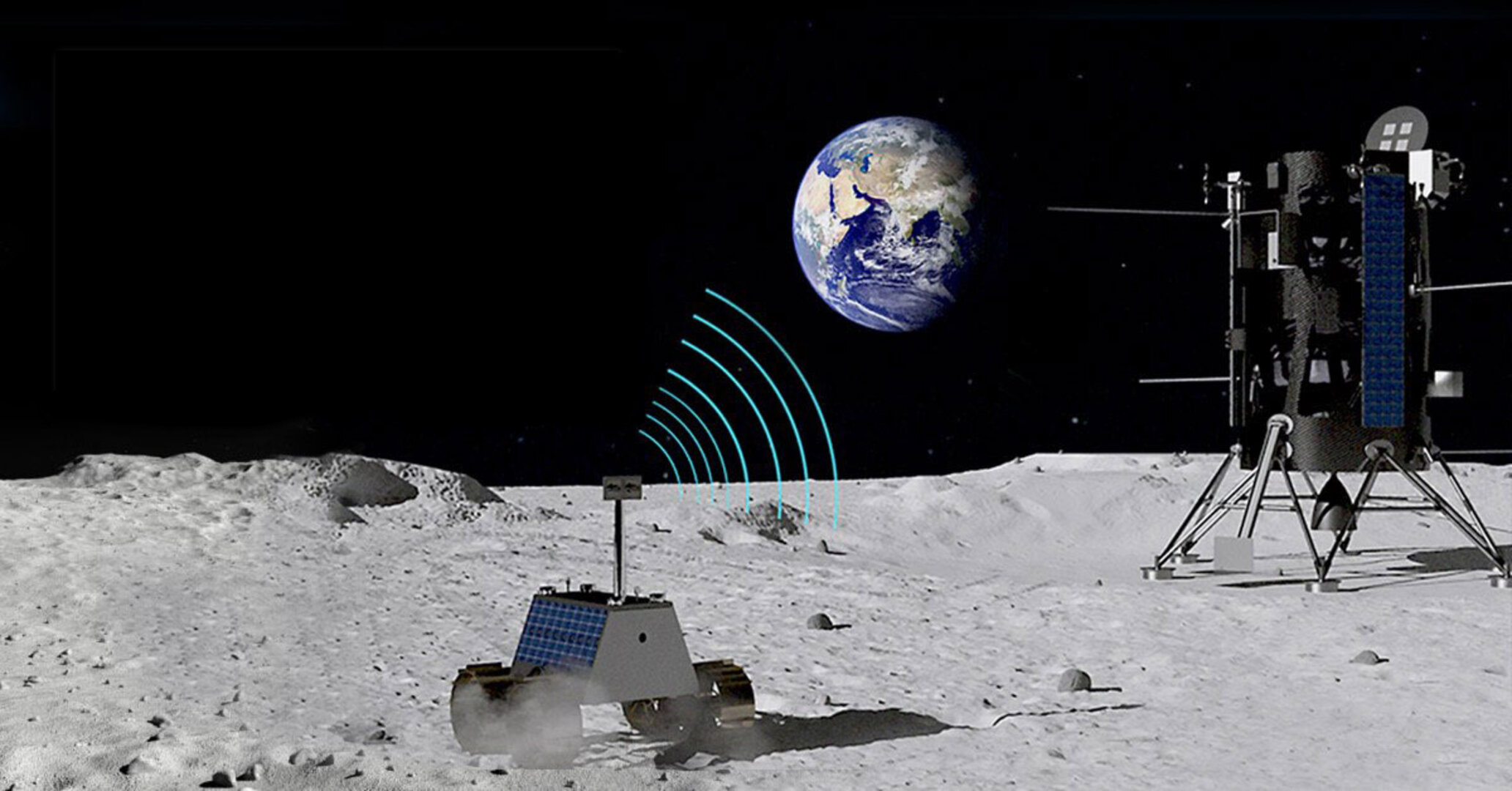
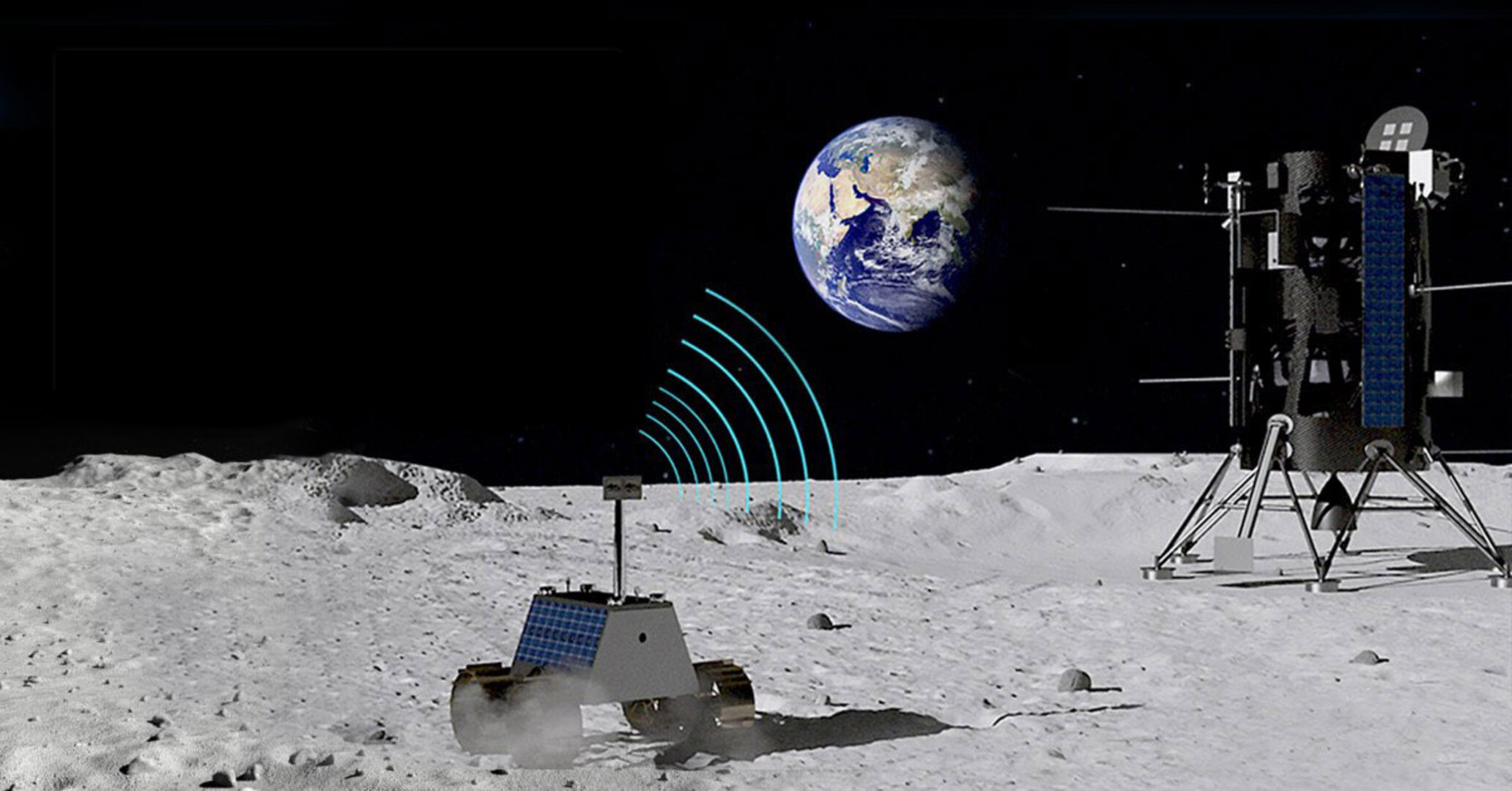
Zatímco PRIME-1 bude studovat zdroje pod povrchem Měsíce, firma Nokia chce provést první testy své 4G LTE sítě, která bude speciálně zodolněná pro použití v kosmickém prostředí. Malý rover postavený firmou Lunar Outpost se má vydat až na vzdálenost 1,5 kilometru od landeru Nova-C a během cesty bude testovat kvalitu bezdrátové sítě od firmy Nokia v různých vzdálenostech. Rover bude komunikovat s přenosovou stanicí umístěnou na landeru Nova-C a lander pak získaná data pošle na Zemi. Tato demonstrace by mohla vyšlapat cestu ke komerčním 4G/LTE systémům pro kriticky důležitou komunikaci na lunárním povrchu. Praktické využití by mohlo obnášet základní komunikaci i živý přenos videa ve vysokém rozlišení od astronautů či vozítek do základen a podobně.

Zdroj: https://static.wixstatic.com/
Zbývá ještě zmínit třetí technologický experiment, malý pohyblivý robot Micro-Nova od firmy Intuitive Machines má být vyložen na povrch, odskákat do nedalekého kráteru, kde pořídí fotky i vědecká měření a poté zase vyhopká ven. Jakmile se robot dostane z kráteru, odešle data zpět do landeru Nova-C. Robot Micro-Nova má nést zhruba jeden kilogram užitečného vybavení a mohl by se vzdálit až na dva a půl kilometru. Mohl by tak poskytnout snímky lunárního povrchu ve vysokém rozlišení pro podrobnější analýzu. Tato demonstrace by mohla vést k širšímu využívání komerčních lunárních landerů při zajišťování průzkumných služeb. V budoucnu by mohli mít vědci možnost vybavit poskakujícího robota svými vlastními vědeckými přístroji – kamerami, seismometry, koutovými odražeči a tak dále.
„Tyto prvotní technologické demonstrace využívají inovativní partnerství, která poskytují cenné informace o provozu na měsíčním povrchu a také o jeho výzkumu,“ říká Niki Werkheiser, ředitelka oddělení pro technologické zlepšování na Ředitelství kosmických technologií NASA v centrále agentury ve Washingtonu a dodává: „Získaná data poskytnou informace pro návrhy budoucích misí z hlediska využívání místních zdrojů, mobility, komunikace, získávání energie až po možnosti eliminace účinků prachu.“
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/sites/default/files/thumbnails/image/prime1_nova-c_im.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/prime-1_landing_site.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/trident_testing.jpg
https://www.esa.int/…/22283535-1-eng-GB/Testing_lunar_4G_operations_pillars.jpg
https://static.wixstatic.com/…/7c27f7_3e6be590d7554c02baf43372232da937~mv2.png




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Chtěl bych se zeptat, jakým způsobem bude robot Micro-Nova řízeně skákat a jaká raketa lander přepraví.
Detaily skoků zatím nejsou popsány. Nosičem má být Falcon 9.
Podle wiki to bude vynášet Falcon 9 (je tomu skutečně tak?). A z renderu je patrné, že Micro-Nova má vlastní pohon.
Ano, Falcon 9 by to měl být a to, že má vlastní pohon, je jasné. Jen jsem nikde nenašel podrobnější info o tom systému.
Zajímavá a pestrá mise, to mám rád 🙂 Měla by to být první mise programu Commercial Lunar Payload Services (CLPS). Druhý bude Peregrine od firmy Astrobotic, kteý dopraví o rok později v článku zmiňovaný VIPER.
Pokud se nepletu (a pokud se něco nezměnilo / nezmění), tak v článku popsaný náklad by měl letět na misi IM-2, které by měla předcházet mise IM-1.
No jo, vypadá to tak. Takže na IM-1 se aktuálně můžeme těšit ještě dříve během 2022 a v článku popsaná IM-2 s vrtákem, skákadlem a LTE roverem bude v rámci CLPS až číslo 2. Nějak mi uniklo to číslování misí Intuitive Machines. Díky za upřesnění. A ještě jednou se asi musím potupně opravit. Ten VIPER na konci 2023 nedopraví lander Peregrine, ale Griffin. A pokud se nepletu potřetí, tak by to mělo být pomocí Falcon Heavy?
Přesně tak by to mělo být. 😉