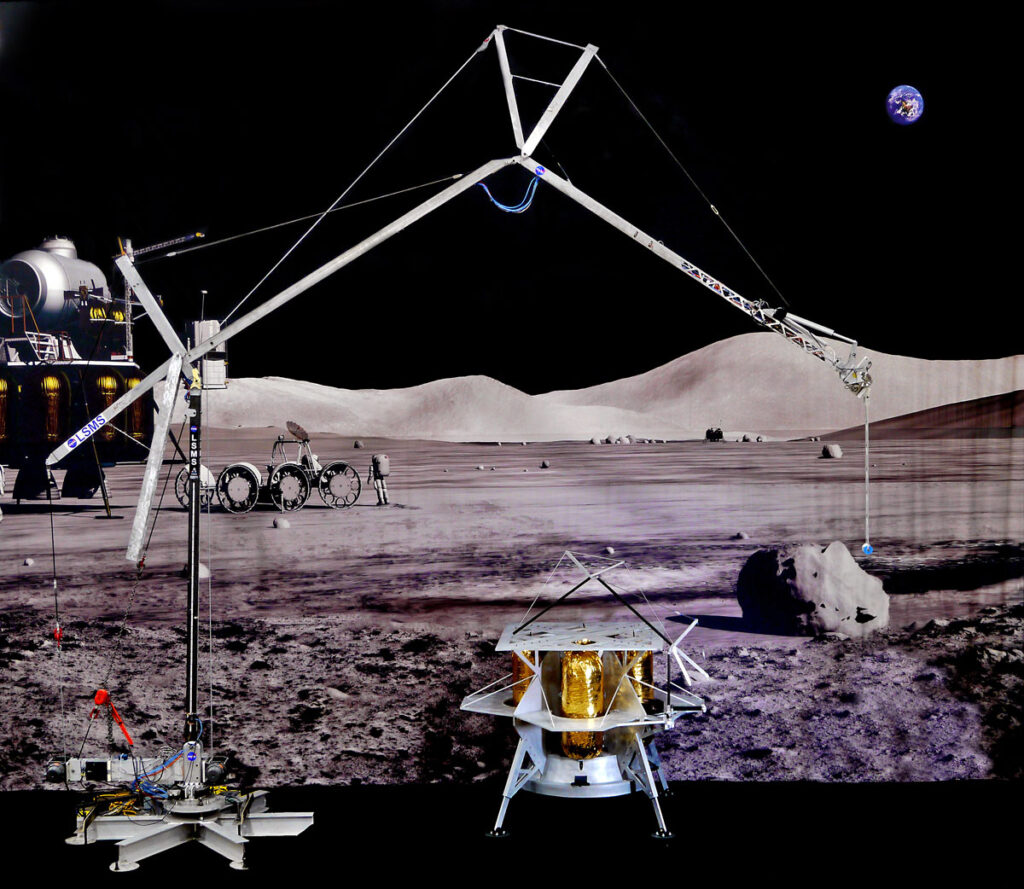
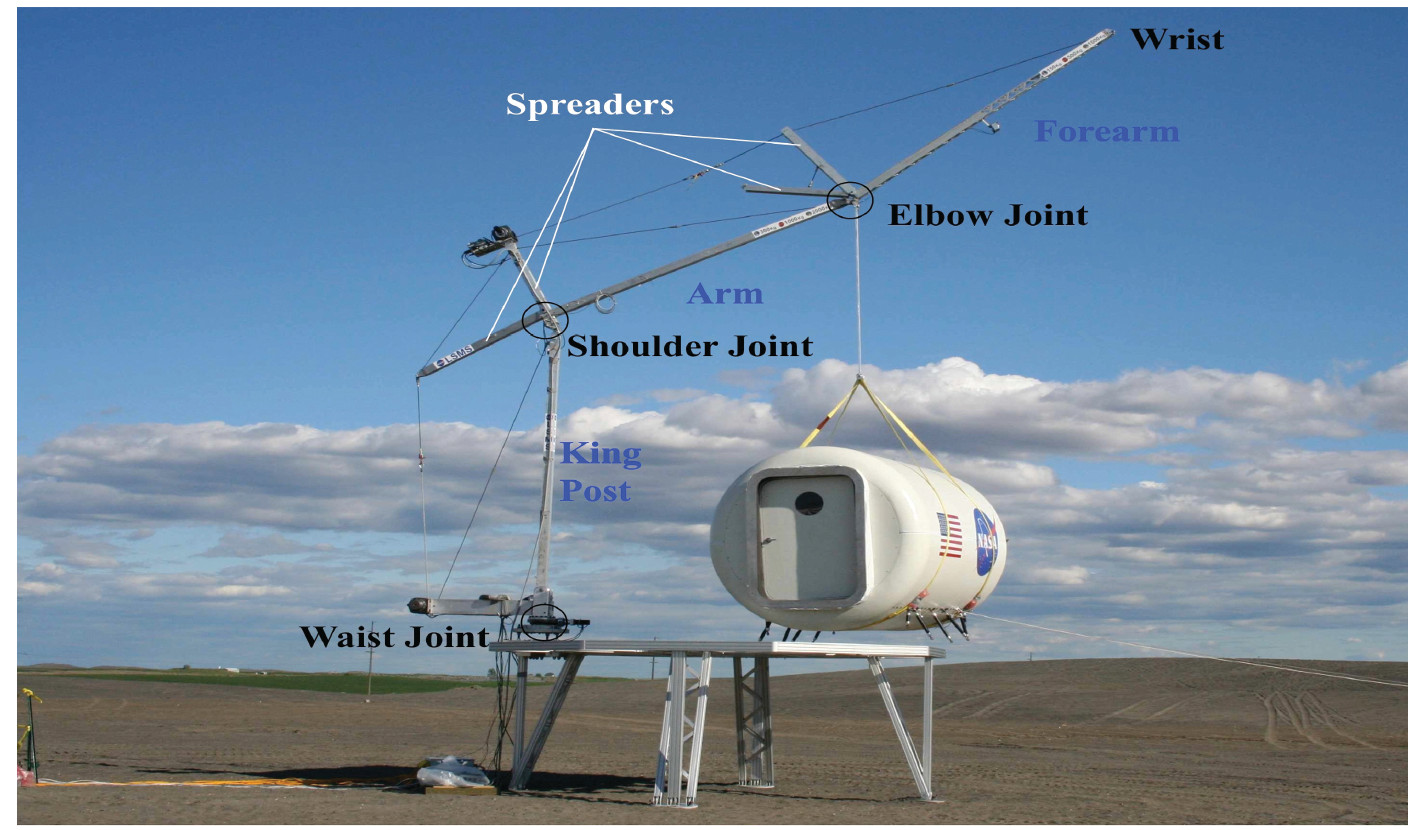
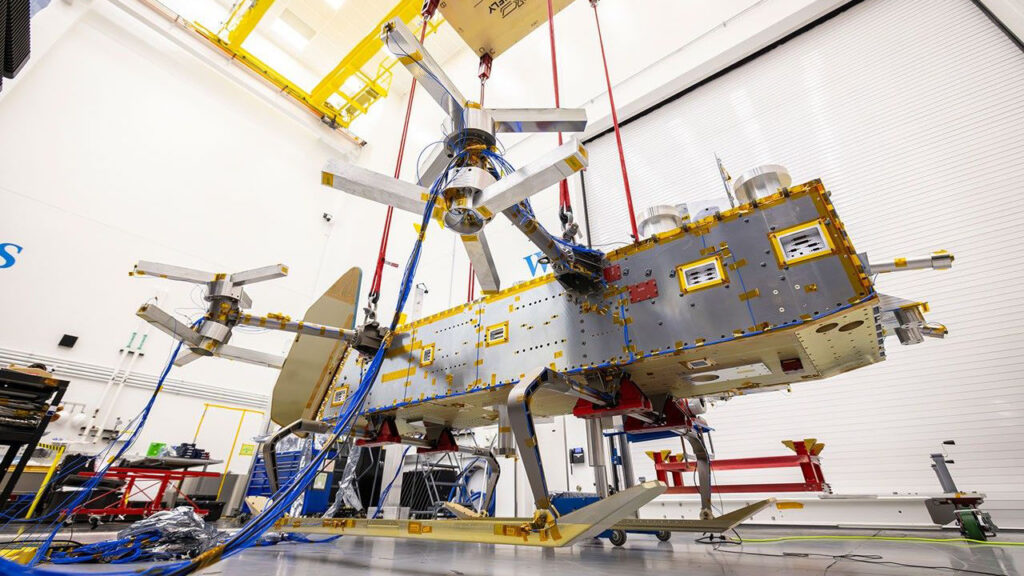
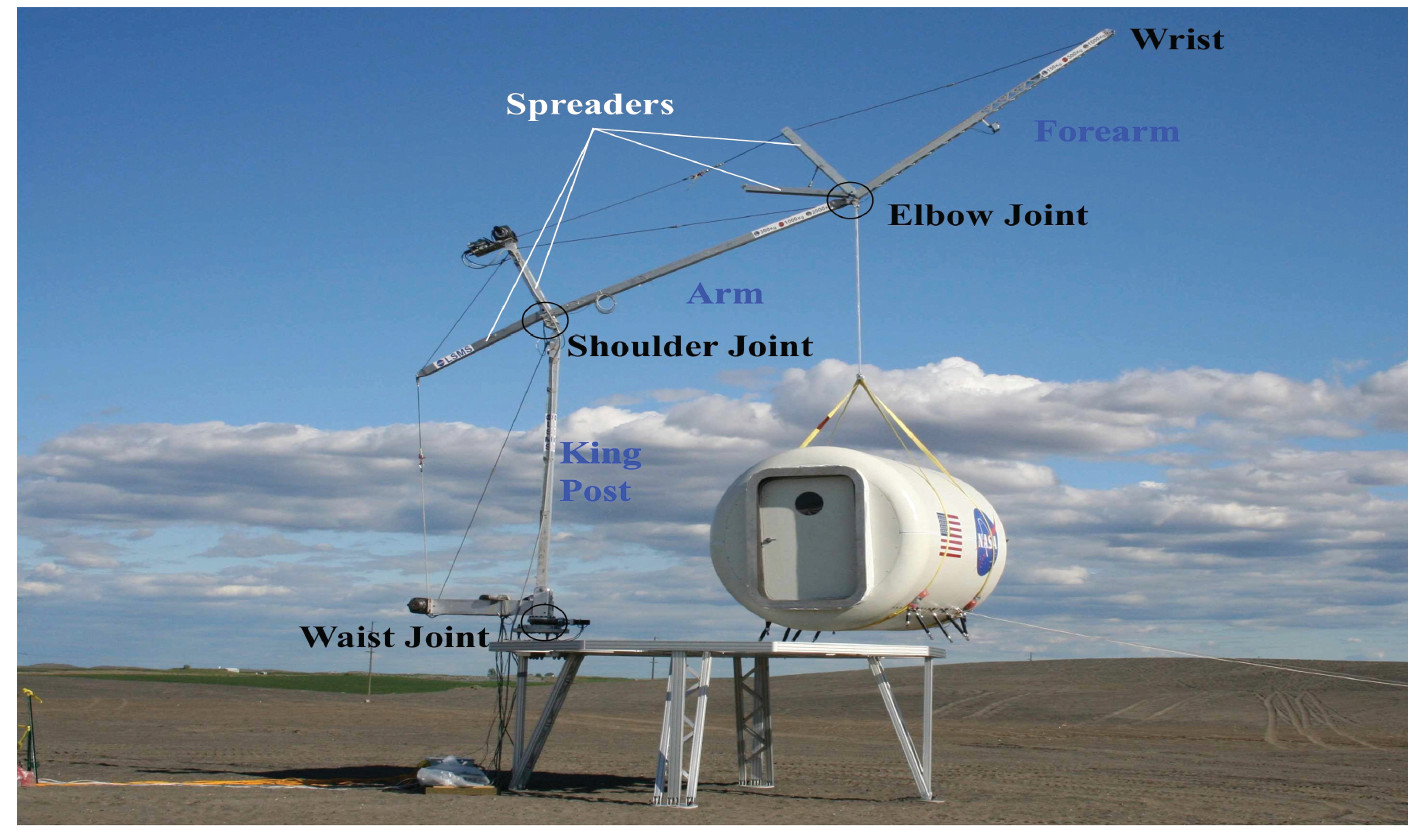
Sama NASA říká, že technologie LSMS (Lightweight Surface Manipulation System) je jako švýcarský armádní nůž – není mnoho věcí, se kterými si nedokáže poradit. Tento robotický jeřáb se vyznačuje nízkou hmotností – sestává se z lehké a odolné kostry z příhradových nosníků ovládané pomocí lan a celá konstrukce napodobuje pohyby lidské paže – jen s mnohem větším dosahem. Výhodou by měla být možnost snadného škálování, aby se konstrukce vešla do jakéhokoliv landeru, vozítka, či povrchového systému. Další výhodou je, že systém má možnost rychlé výměny koncovek s nářadím, které jsou uloženy v zásobníku. Systém tak může sloužit jako zvedák, vysokozdvižný vozík, lopatka na regolit, svářečka a tak dále.

Zdroj: https://www.nasa.gov/
„Unikátní vlastností LSMS je jeho obratnost a víceúčelovost,“ říká Barmac Taleghani, projektový manažer z Langley Research Center v Hamptonu, stát Virginia. Právě tady byl systém LSMS navržen, postaven a otestován – dokonce už před více než deseti lety. Tehdy se mu povedlo demonstrovat koncept vykládání velkého nákladu (jako jsou třeba obytné moduly či rovery) z landerů při pilotovaných průzkumných misích. „Začali jsme přemýšlet o tom, že by dodatečné nástroje mohly být užitečné, jelikož by s nimi mohl LSMS dělat různorodé úkoly,“ popisuje Tom Jones, hlavní pracovník tohoto projektu a dodává: „Když už jsme tam tu hmotu dopravili, tak proč ji nevyužít ještě jednou?“
Zdroj: https://www.nasa.gov/
Vylepšení, kterými LSMS od svého prvního vývoje prošel, obnáší již zmíněné nové nástroje jako třeba bagrovací lžíce pro kopání, hrabání a přemísťování, vidlice, jakou známe z vysokozdvižných vozíků pro manipulaci s paletami a svářečka. Novinkou je také vylepšená autonomní funkčnost. Tým nyní pracuje na návrhu, stavbě a zkouškách předletové, tedy téměř letové verze, která by mohla být prověřena na velkém lunárním nákladním landeru. Práce na pozemních demonstrátorech je financována formou programu přelomových technologií (Game Changing Development), který organizuje ředitelství NASA pro kosmické technologické mise.

Zdroj: https://www.nasa.gov/
„Když v rámci programu Artemis založíme udržitelnou přítomnost na Měsíci, budeme potřebovat usadit mnoho různých prvků a bude tu široké spektrum úkolů, které mohou využít všestrannosti a funkčnosti LSMS,“ doplňuje Jones. Nový LSMS bude mít podobnou velikost jako původní prototyp – bude mít dosah téměř 7,5 metru a bude schopen uzvednout náklad, který na Měsíci váží 1 tunu. Podobné maximální rozměry mají mít vědecké přístroje, technologické demonstrátory, či rovery, se kterými se počítá v programu Artemis. Hardware LSMS bude certifikován pro použití v kosmickém prostředí a má být připraven na další vývoj, který by zajistil jeho kompatibilitu s jedním či více landery, které budou vybrány pro lety k Měsíci.
„Chceme dosáhnout úrovně, kdy budeme mít předletový hardware postavený a testovaný v rámci aktuálního projektu,“ popisuje Jones a dodává: „Navazující projekt by pak vyvinul dodatečné mechanické a elektrické rozhraní či software potřebný k integraci s landerem.“ Cílem je ve finále předvést tuto technologii v různých velikostech, které by mohly najít využití u menších komerčních robotických přistávacích zařízeními, ale i u větších přistávacích zařízení, jaké najdeme v projektu Human Landing System. „V rámci našeho projektu připravujeme analytické nástroje, abychom mohli poměrně rychle navrhovat různé velikosti LSMS,“ říká Jones a dodává: „Systém LSMS je navržen tak, aby mohl fungovat jak na Měsíci, tak i na Marsu – vlastně si poradí s jakýmkoliv pevným povrchem. Mohou tu být odlišné požadavky na prostředí podle cílové lokality, samotný hardware bude velmi podobný.“
Zdroj: https://technology.nasa.gov/
Kromě projektu v rámci programu přelomových technologií, se tým rozhodl v době vyhlášení návratu na Měsíc zahájit práci na menší verzi LSMS pro menší robotické landery, které by měly předcházet pilotovaným výpravám. Varianta mini-LSMS má mít dosah zhruba 1,8 metru a může sloužit k vykládání nákladu z landerů, čímž by se zároveň v reálném prostředí ověřila funkce systémů LSMS – byť pouze ve zmenšeném měřítku. „Této verzi bychom mohli přidat i některé unikátní vlastnosti jako je třeba dobíjení vozítka,“ říká Jones a dodává: „S mini-LSMS můžete vyložit vozítko, to se vydá na misi a pak se vrátí. Protože LSMS má elektrický konektor na své špičce, mohl by být rover dobit, což by mu umožnilo uskutečnit další unikátní misi.“
Jones také věří, že se v budoucnu podaří vyvinout další technologii, která by mohla být umístěna na mobilní platformě: „Pokud bychom LSMS umístili na rover, získali bychom například mobilní zařízení pro kopání a práci s regolitem. Mohli bychom také vyzvednout náklad z landeru, který právě přistál. Použití mobilní verze LSMS eliminuje nutnost přistání každé mise u vykládacího systému, což by přineslo významnou úsporu hmotnosti, ale také finančních prostředků.“
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/sites/default/files/thumbnails/image/lsms_and_mini-lsms_lab.jpg
https://www.nasa.gov/images/content/246759main_lsms3-800.jpg
https://www.nasa.gov/sites/default/files/thumbnails/image/small_payload_offload.gif
https://www.nasa.gov/images/content/246750main_lsms1-800.jpg
https://technology.nasa.gov/t2media/tops/img/LAR-TOPS-73/BackMain_NP-2014-08-1114-HQ.jpg




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
„…tvoří jej strukturálně efektivní rámec z příhradové konstrukce s pohyblivými kabely…“
Návrh na lepší překlad k diskuzi:
„…sestává se z lehké a odolné kostry z příhradových nosníků ovládané pomocí lan…“
Přiznám se, že na překlad cable-kabel, když jde lano, jsem alergický podobně jako na překlad control-kontrola, když jde o řízení.
Díky, opraveno. 😉
Mě tam chybí důležitá informace. Když vidím nosnost jeřábu 1000 kg, nevím jakou má bezpečnost, to znamená kolik unese když ho přetížím. např v práci máme na jeřáb lana s nosností 2 t, ale bezpečnost mají 7:1, to znamená že se přetrhnou když pověsím 14 t. Takže jakou zátěží zničím jeřáb s nosností 1000 kg, kolik je hranice co unese? Jestli mu rupne lano když dám 1001 kg, nebo třeba trojnásobek? Tady když vidíme tenký super efektivní konstrukce zpevněné lany, tak by to bylo zajímavý vědět kolik unese, teda kolik má ten bezpečnostní násobek, ten se zároveň využije při zastavení závaží během pokládání, teda zrychlení.
Zkuste kontaktovat autory, třeba Vám to prozradí. 😉
Radši si dám na Měsíci pozor a nebudu jeřáb přetěžovat ani o kilo 🙂
Správné rozhodnutí. 😉
Proběhnul jsem následující článek, který popisuje detaily technologického demonstrátoru který postavili. Vypíchnu body, které mě zaujaly:
1) Měření v zátěži ukázalo velmi přesnou shodu mezi fyzickým a virtuálním modelem jeřábu. Tedy jeřáb se chová stejně jako v modelu a můžete jej dimenzovat s menší bezpečností.
2) Jeřáb váží 3% maximální hmotnosti na konci ramene. To mi přijde hodně dobrý, ale nevím nic o jeřábech.
3) To by mělo být částečnou odpovědí na vaši otázku. Na konci stránky 9 píšou, že při designované zátěži 330lb, je tah na „t2b tensions“ 33% jejich „ultimate strenght“ (což je tah při kterém určitě prasknou.) Tudíž mají rezervu i na dynamické zatížení.
Jestli to správně interpretuji, projektují s bezpečnostním faktorem 3. To cca souhlasí s tím co jsem četl o tom, jak se navrhují věci pro kosmos. Musí být co nejlehčí, takže testujete, certifikujete, modelujete a máte vysoce kvalifikovanou obsluhu. A tudíž si můžete dovolit navrhovat s výrazně nižšími rezervami.
ty informace jsem moc nepochopil, ale budu teda věřit výsledku že trojnásobek. U jeřábů nemám přehled kolik bývají bezpečnostní násobky, ty lana byl jeden skutečný příklad z práce. Klidně může být trojnásobek běžná věc, nevím. Kvalifikovaná obsluha v podobě astronautů ale asi násobek nesnižuje, protože zvedací zařízení patří mezi vyhrazená zařízení jako elektrika, plyn a tlakové nádoby, jejich obsluhu může dělat jen kvalifikovaná obsluha, žádná poučená, musí se na to pravidelně dělat školení a zkoušky a v případě elektriky musí být i elektro vzdělání, takže jeřáby jsou jen pro ty kvalifikovaný pravidelně testovaný a s lékařskou kontrolou.
díky za info.
https://pdfs.semanticscholar.org/c693/09f3418d4c3553de92e38d688e1346ddc721.pdf
Tady je studie která popisuje samotnou designovou část. A tam si stanovili safety factor 3 pro všechny části jeřábu. A SF 5 pro kabely, protože to doporučuje kniha o designu jeřábů.
Když jsem mluvil o kvalifikované obsluze, tak jsem nechtěl nijak snižovat kvalitu obsluhy běžných jeřábů. Spíš v tom smyslu, že ten měsíční jeřáb bude stvořen přesně pro daný úkol. A všechny pohyby, které během mise vykoná budou spočteny a namodelovány dopředu. Nemusíte se zajišťovat proti korozi, nestane se vám, že by někdo špatně vyrobil betonové panely a ty budou vážit o polovinu více. Zkrátka, že bude operovat v prostředí kde je mnohem méně proměnných. A na druhou stranu ten tlak na hmotnost tam je extrémní. Zatímco na cenu mnohem méně.
Jo tak to je zajímavý vědět ty násobky, protože jeřáb může vypadat jako slabý, ale ta konstrukce je hodně efektivní a souhlasím že materiály budou drahý pevný. Myslím, že jeřáb bude mít využití jako hodně univerzální a ne jen specifický, ale souhlasím, že hmotnost věcí se bude hodně dobře vědět. Při práci na Zemi je v tom často takový chaos, že se to dobře neví, ale přemístit se to musí teď 😀
Kabely asi nebudou mechanicky namáhaný, ale lana jo 🙂
Myslím, že takový jeřáby jen levnější verze se začnou běžně využívat i na Zemi, to by se hodilo i domu 🙂
Dobrý den,
asi to sem nepatří, tak jen jako zajímavost na zasmání. Jsem velký fanda lidského počínání si ve vesmíru a tak jsem dostal ke hře KSP. No a tam jsem v rámci svého fiktivního programu stavby měsíční základny poslal na měsíc autojeřáb : konfigurace podvozku 8×8 přední i zadní nápravy řiditelné, max. zátěž na povrchu měsíce Mun – malý poloměr: 2,5t; max. poloměr: cca 400kg; výškový dosah: 13.5m.