
Před pár dny jsme Vás informovali o nepříjemnosti, která potkala americké vozítko Curiosity, které již téměř čtyři roky brázdí povrch Marsu. Nyní dorazily z řídícího střediska potěšující informace. Rover opustil takzvaný bezpečný režim a opět je připraven na výzkumnou činnost. Vozítko do bezpečnostního režimu přešlo 2. července a opustilo jej o týden později, tedy v sobotu devátého. Jak se ukázalo, původní domněnky byly správné – za celý problém mohlo nedorozumění v systému na zpracování obrazových dat z kamer.
Curiosity disponuje hned několika režimy, které zajišťují transport a zpracování dat na palubě vozítka. Konkrétně šlo o režim, který přepisoval nasnímané fotky z mezipamětí jednotlivých kamer do souborů uložených v hlavním řídícím počítači roveru. Jelikož šlo o softwarový problém, dala se závada snadno opravit. NASA neuvádí, zda se připravuje nějaká aktualizace daného programu, jisté ale je, že režim, ve kterém se objevily chyby, se používat nebude.
Zdroj: http://www.unmannedspaceflight.com/
Zdroje informací:
http://www.nasa.gov/
Zdroje obrázků:
http://edu.ascon.ru/bestmodels/63072/6307208.jpg
http://www.unmannedspaceflight.com/index.php?act=attach&type=post&id=39642






{kind=link}
Stejně je to pozoruhodné. Už to vlastně budou 4 roky, co tam jezdí… Když si to člověk vezme, čtyři roky provozovat něco bez údržby? To by stálo za pozornost i na Zemi 🙂 No, slušný výkon, a vypadá to že bude vesele pokračovat.
Však se také jeho vývoji věnovala značná pozornost. 🙂
je to kovovy chlapak. zanedlho mu pristane dalsia posila.
Snad se všechno podaří 🙂
Zaujímalo by ma koľko toho najazdil zatiaľ. Na Wiki to na rozdiel od MER nieje.
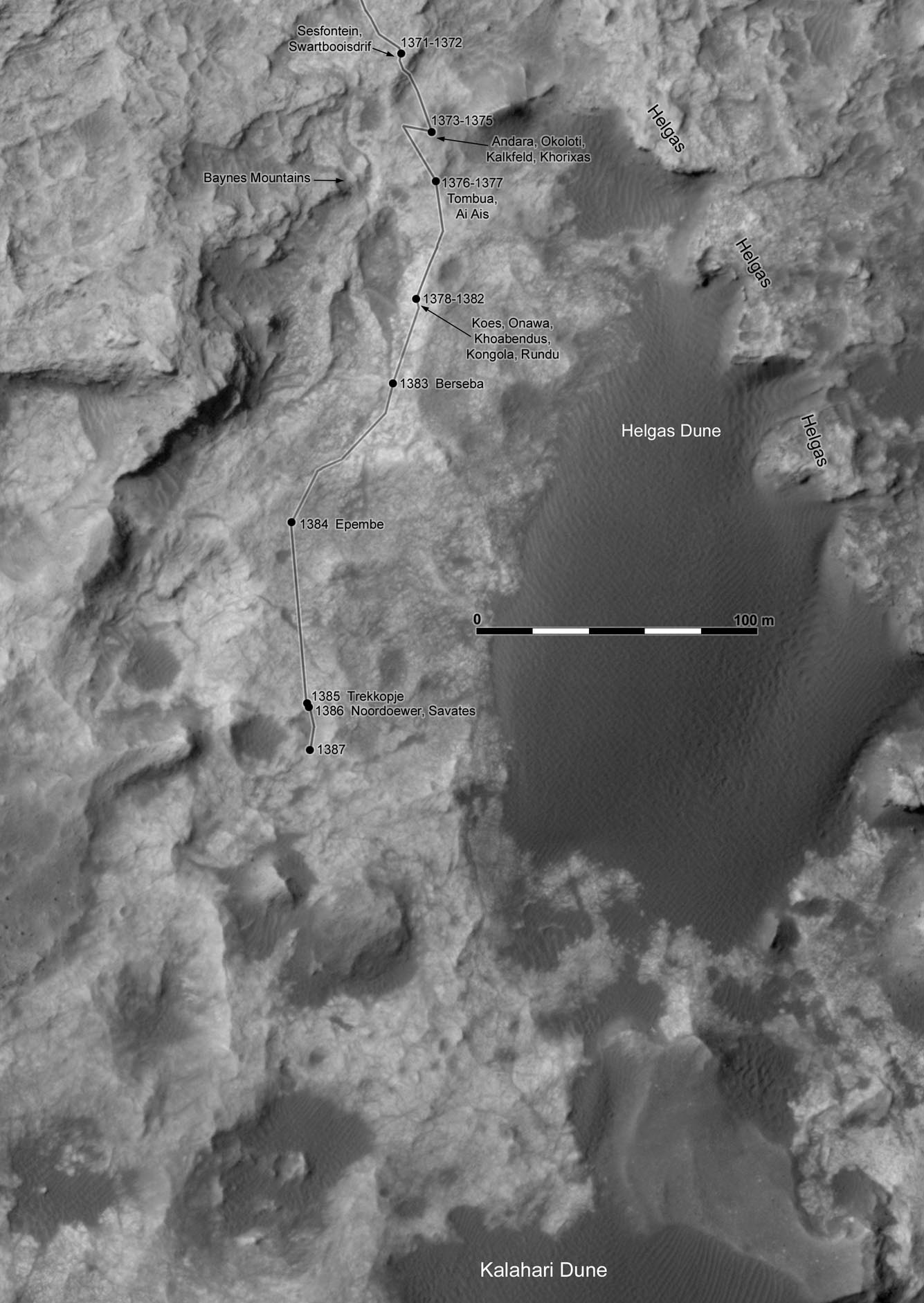
13.23 km k solu 1387, 11 solů zpět
Tak kolik? Na odkazu od Spytihněva je 14,377Km
Sebral jsem to zde – http://marsmobile.jpl.nasa.gov/msl/mission/whereistherovernow/
Taky by mě to teda zajímalo.
Doufám, že nám to někdo pomůže vyřešit. Více než kilometrový rozdíl je opravdu hodně (14447 vs. 13300). Osobně bych dával přednost tomu svému zdroji (je to takové více strohé, jen čísla a posloupnost přehledná až do přistání), ale chci znát pravdu! 🙂
Já osobně preferuji http://curiositymsl.com/tracking/drivelog.html, tedy 14447 🙂 Ale třeba mne někdo opraví.
Existuje několik způsobů, jak se určuje vzdálenost ujetá roverem:
1. Počet otáček kol. Tento způsob ujetou vzdálenost nadhodnocuje, protože občas kola podklouznou, aniž by se rover pohnul. Na druhou stranu takto spočtená vzdálenost ale víc odráží opotřebení kol a hnacího ústrojí.
2. Kola do terénu obtiskávají značku (v Morseově abecedě) JPL. Kamery na zadní části průběžně fotí stopu za roverem a z počtu, kolikrát se obtisklá značka objevila, se odhaduje ujetá vzdálenost. Tento způsob odpovídá víc skutečně ujeté vzádelosti.
Finální číslo je ale stejně na pozemním týmu a vychází z analýzy všech dostupných údajů, včetně steresnímků okolí atd. (na Marsu nefunguje žádná GPS, takže to rozhodně není jednoduchá úloha 🙂 ). Bohužel jsem nedohledal, který ze dvou odkazů vychází z kterého způsobu, ale tipl bych si, že odometr bude odvozen přímo z otáček kol.
Curiosity drive log je přesnější. Jeho údaje vychází z datových souborů, zaznamenávajících polohu a pohyby roveru na základě údajů z IMU a dalších akcelerometrů. Tyto soubory jsou zveřejňovány denně v JPL Navigation and Ancillary Information Facility, zde: http://naif.jpl.nasa.gov/naif/. Tyto údaje by měly postihovat veškeré reálné pohyby těžiště roveru, včetně jízdy stranou, couvání a podobně.
Mam za to, že kratší vzdálenost, zveřejněná na homepage MSL, je zaokrouhlována v denních intervalech, přičemž drobné pojízďecí manévry do stran a vzad nejsou započítávány.
Je zajímavé, že rozdíl činí cca 8 %, ale není to nemožné.
ODO Curiosity plus další základní údaje se dá pěkně sledovat tady
http://curiosityrover.com/tracking/drivelog.html