Informacím o pokroku ve vývoji nového vozítka pro Mars už včera ve 200. vydání seriálu Kosmotýdeník zrekapituloval kolega Lukáš Houška. V tomto článku se ale k misi vracíme ještě jednou. Čtenář našeho diskusního fóra, Mirek Pospíšil, totiž narazil na zajímavý detail, který se točí kolem teoretického spolucestovatele, který by mohl napsat novou kapitolu v kronice výzkumu Marsu a celkově kosmonautiky vůbec. Ještě nikdy totiž lidé mimo Zemi neprovozovali rotorem poháněný stroj. Jeho realizace ale zatím není jistá. Přesto se jedná o tak zajímavý projekt, že Vás s ním seznámíme formou článku.
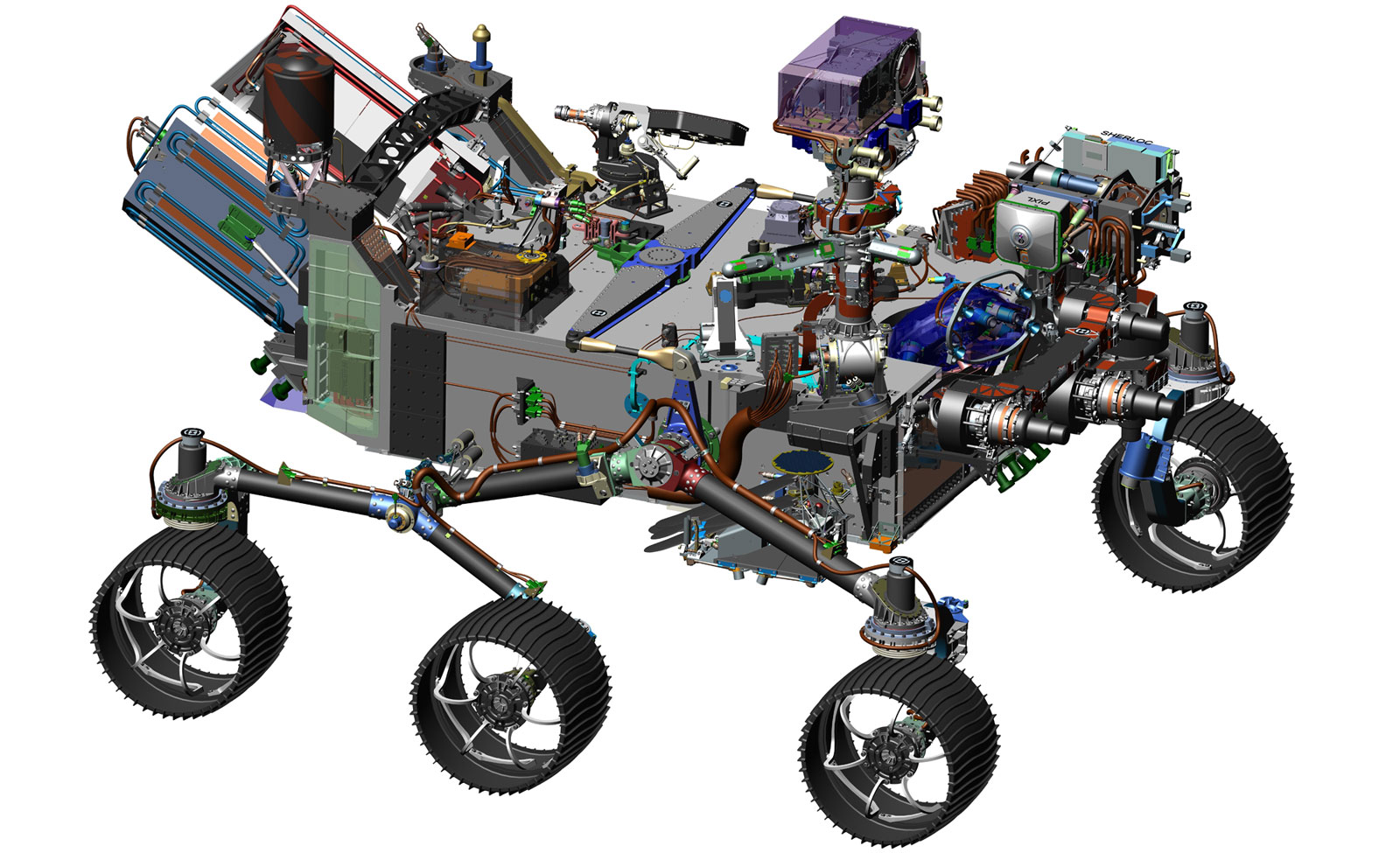
O tom, že by se na nástupci vozítka Curiosity, tedy Mars roveru 2020, mohl objevit helikoptérový dron, se čas od času spekulovalo, ale když NASA při oznámení detailů o vozítku sdělila, že se s dronem na této misi nepočítá, zdálo se, že se malé helikoptéry nedočkáme. Ovšem na CAD modelu celého vozítka , který NASA zveřejnila souběžně s tiskovou zprávou něco nehraje. Když se podíváte k pravému přednímu kolu, všimnete si tam složeného vrtulového dronu. Pod tímto odstavcem najdete konkrétní obrázek, pokud byste měli zájem o jeho plné rozlišení (na šířku 10 000 obrazových bodů), klikněte sem.
Zdroj: nasa.gov
Do startu mise zbývají čtyři roky, projekt má za sebou fázi schvalování návrhu, zahájí se samotná stavba vlastních dílů. Je otázkou, zda se malá helikoptéra nakonec do mise dostane, nebo ne. Jisté ale je, že malý autonomní letecký průzkumník – chcete-li dron – by byl pro celou misi přínosem. Inženýři z JPL navrhli malou helikoptéru o váze sotva jeden kilogram, která by vozítku pomáhala s orientací v prostoru.
Zdroj: http://photojournal.jpl.nasa.gov/
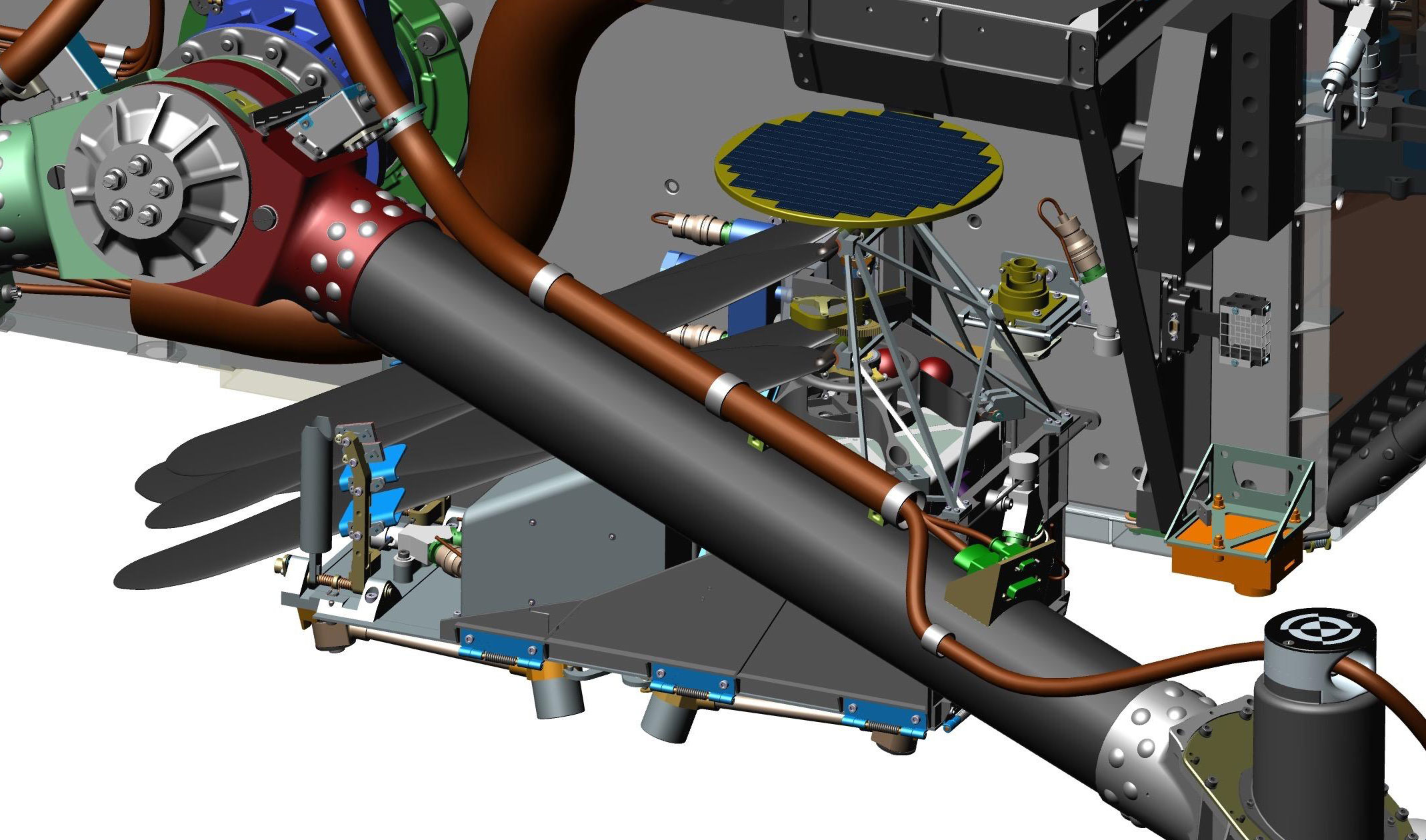
K dispozici nemáme víc, než jen vizualizaci roveru ve formě CAD modelu. I z toho mála se ale dá vyčíst mnoho informací. Konstruktéři počítají s tím, že by se dron mohl k Marsu vydat se složenými vrtulemi, což je logické, protože kvůli řídkosti marsovské atmosféry musí být rotory dostatečně velké a v rozloženém stavu by zabíraly mnoho místa. Na zmíněném obrázku je dron uložen mimo horní plochu těla roveru a najdeme jej u pravého předního kola. Tohle místo bylo zřejmě vybráno proto, že zde nebude dron ničemu překážet, což je důležité především během kritického přistávacího manévru.
Otázkou zůstává, jak by se dron od vozítka oddělil. Mirek Pospíšil na našem fóru spekuluje nad dvěma možnostmi: „(První z nich je…) robotická paže bude mít některý ze svých přístrojů na karuselu uzpůsoben tak, že bude moct dron z parkovací pozice vytáhnout a položit na zem. (Druhou možností je …) police, na které je dron upnut, se spustí přímo dolů na povrch, rover poodjede a dron je volný“.
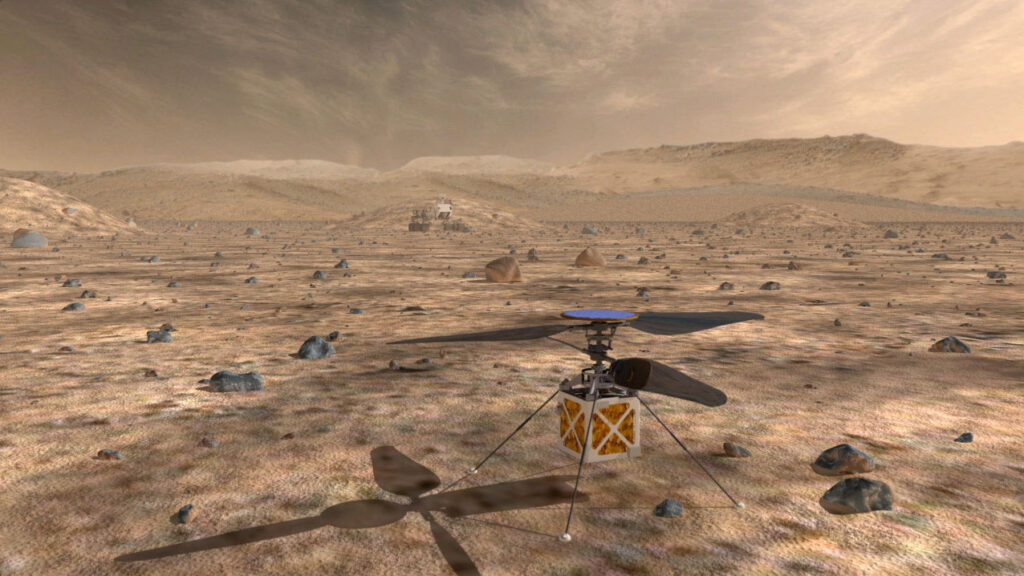
Pokud by se dron označovaný jako Mars Helicopter opravdu realizoval a letěl s vozítkem k Marsu, měl by za úkol provádět detailní snímkování okolí roveru. Byl by to autonomní průzkumník, který by sbíral informace o terénu ještě předtím, než by do něj rover přijel. Mohl by tak ověřovat průchodnost trasy, nebo vyhledávat zajímavé vědecké cíle. Rover by tak mohl provádět bezpečnější a rychlejší přesuny.

Zdroj: http://image.pasadenastarnews.com/
Dvourotorová minihelikoptéra by čerpala energii z kruhového solárního panelu a ukládala ji do baterií. Jednou za marsovský den by tak mohl stroj vykonat zhruba dvou- až tříminutový autonomní let ve směru dalšího očekávaného pohybu. Pak by přistál a čekal by, až k němu vozítko přijede, načež by se celý proces druhý den mohl opakovat.
Dron by musel být vybaven komunikačním zařízením, aby mohl odesílat na rover pořízené snímky. Vozítko samotné by se pak postaralo o jejich odeslání k Zemi (přes družice na oběžné dráze). Letos v březnu měl být v komoře napodobující marsovskou atmosféru otestován prototyp tohoto dronu o váze 1 kilogramu a průměru rotoru 1,1 metru.
Na našem webu se snažíme psát články pouze o ověřených zprávách a spekulacím se raději vyhýbáme. V tomto případě jsme ale udělali výjimku, protože přítomnost složeného dronu v CAD modelu dává alespoň nenulovou šanci na realizaci. Doufáme, že se Vám tento článek líbil a snad se této minihelikoptéry dočkáme.
Zdroje informací:
http://forum.kosmonautix.cz/
http://forum.kosmonautix.cz/
http://www.pasadenastarnews.com/
http://www.pcmag.com/
http://www.space.com/
Zdroje obrázků:
http://www.jpl.nasa.gov/images/mars/20150122/mars20150122-16.jpg
http://photojournal.jpl.nasa.gov/jpeg/PIA20759.jpg
http://image.pasadenastarnews.com/…/0/AR-150139963.jpg&maxh=400&maxw=667






{kind=link}
{kind=link}
{kind=link}
Vzhledem k hustotě atmosféry Marsu to vypadá dost šíleně, ale jestli to bude fungovat, tak to bude bomba. Dovedl bych si to představit i na Titanu, kde by to sice nemohlo získávat energii ze Slunce, ale mohlo by to přistávat a nabíjet se přímo na roveru napájeném radioizotopovým generátorem. Navíc na Titanu jsou pro létání ideální podmínky – malá gravitace a hustá atmosféra.
Zajímavý nápad, že by se helikoptéra vždy napojila na zdroj roveru a dobila. Na Titan se chystá plavidlo (poháněné větrem i kolesové), balón, letoun, ale o roveru jsem ještě nic neviděl. Před Cassini a Huygensem by asi šlo o mohutný hazard, vzhledem z naprosté neznalosti rozložení ploch moří na Titanu, ale dnes už by se přistání na souši trefit dalo.
Realizacia takeho drona by bola urcite zaujimava najma preto, ze podmienky na marse su znacne odlisne. Hlavne moja predstava o tom, aka riedka marsovska atmosfera je mi velmi nedovoluju predstavit si, ako tam bude vrtulovy stroj fungovat.
Atmosfera nie je husta, ale na druhu stranu je tam iba tretinova gravitacia, cize asi to maju spocitane, ze to fungovat bude. Pokial ano tak sa otvoria nove moznosti, pretoze skumanie Roverami je skutocne zdlhavy proces.
Myslím, že zkoumání pomocí roverů nemá alternativu. Drony mohou provádět podrobné mapování z malé výšky, ale zkoumání Marsu musí probíhat na povrchu nebo pod ním. A tady si neumím představit, že by nějaký létající stroj přenášel třeba vrtnou soupravu nebo něco na odběr vzorků. Zatím představitelné létající prostředky budou muset být maximálně odlehčené.
Kdosi někde spočítal, že i přes setinovou až dvousetinovou hustotu stačí pouze asi 2,3krát větší vrtule (zčásti kvůli nižší gravitaci, zčásti kvůli mnohem rychlejšímu než lineárnímu nárůstu vztlaku s rostoucím průměrem vrtule – větší lineární rychlost konců vrtule a kvadratický nárůst vrtulí opisované plochy).
Kilový model vrtulníku má na Zemi průměr rotoru kolem 80cm.
Na Marsu bude vážit cca 40 dkg, tomu by v naší atmosféře odpovídala vrtule s průměrem cca 40 cm.
Rotor toho dronu má skoro 8x větší „plochu“, ale stejně bude potřebovat vytvořit 4x větší rychlost proudění, aby vůbec vzlétnul. To asi půjde udělat…
Taky si vybrali na stabilizaci a mechanické provedení asi nejsložitější koaxiální uspořádání rotorů bez mechanického stabilizátoru. Ale i to se dá…
Nejvíc bych se ale na Marsu bál o chlazení motorů a schopnost autonomního fungování bez GPS. Tady mi fakt není jasné, jak si s tím poradí.
No jo. Kdybych věděl, že se chystá článek do blogu, tak bych se včera ani nezmiňoval a neubíral tomuto překvapení na efektu 🙂
Věřím, že se dron prosadí. Evidentně je v jisté fázi vývoje, umístění na rover je (zdá se) také docela vyřešeno a máme před sebou ještě (relativně) dlouhé 4 roky. Borci na videu nadšení taktéž nechybí a vše završuje ležérně zavěšená americká vlajka (což je v pořádku). Pokud jde o pochyby týkající se řídkosti atmosféry, tak předpokládám, že technici vědí, co dělají.
Jsem zvědav, jestli to, že se na jednu stranu oznámí, že dron nebude a současně se uveřejní vizualizace s jeho umístěním na roveru, byla jen chyba nebo s námi NASA hraje nějakou hru. Pokud bude bé správně, budu jedině rád.
Pokud jde o takto zajímavé spekulace, tak s nima sem!
Zajímalo by mě, jak si to poradí s větrem/bouří. Chápu, že to, co odhodilo Marka Watneyho v Marťanovi je hodně přehnané. Ale čekal bych, že vítr, který je schopný něco tak lehkého překlopit nebo odfouknout, se objevit může.
Podle vizualizací by měl mít dron poměrně širokou základnu díky rozkročeným nohám.
Jestli dobře odhaduji, bouře na Marsu má „sílu“ jako vítr o rychlosti 10 km/h tady na Zemi. To by ten dron měl ustát. Spíš bych se bál přistání v clenitem terénu a ve „větru“…
Někde jsem četl/slyšel (přesným zdrojem bohužel neposloužím), že kdyby se neseškrtaly lunární expedice, tak malý průzkumný dron pro pohyb v malé výšce nad povrchem Měsíce by během pobytu používali Stuart Roosa a Jack Lousma z Apolla 20.
Pokud chápeme pojem dron tak, jak jsme ne ně zvyklí za života nebo teď na Marsu, tak s ničím takovým se na Měsíci určitě nepočítalo. Ani nemohlo.
Pokud se s něčím takovým opravdu počítalo, tak technické detaily bohužel neznám.
Vrtulové stroje používají k letu aerodynamický vztlak. Proto jsou nám na Měsíci k ničemu. Možná se v programu Apollo uvažovalo o nějakém doplňkovém létajícím zařízení (i když o tom nic nevím), ale určitě nešlo o nic s vrtulemi.
Ale on neříká, že by ten dron měl mít vrtule. Říká jen „dron“.
Nejsem odborník přes drony, ale takový stroj má podle mého názoru buď vrtule nebo křídla. Což pro naše účely vyjde úplně nastejno. Oboje je na Měsíci nepoužitelné.
Navíc Vítek píše „malý průzkumný dron pro pohyb v
malé výšce nad povrchem Měsíce“. Pomocí ladných celkem dlouhých skoků se mohl pohybovat Philae, ale na Měsíci bez použití ANTIgravitace tohle asi nepřichází v úvahu.
Pokud by to létalo na raketový pohon, a bylo to bezpilotní, klidně bych tomu dron říkal.
Nějaký přehled plánovaných pilotovaných měsíčních letounů je tady:
http://www.astronautix.com/l/lunarflyers.html
Já samozřejmě nepsal ani si nemyslel nic o vrtulích či křídlech, to je na Měsíci nesmysl a přišel s tím až Spytihněv, ne já.
Dovedu si představit pouze stroj s tryskami. Třeba na ISS mají šikovné malé satelity SPHERES a ty manévrují pomocí vypouštění stlačeného CO2 malými tryskami.
Je ale pravda, že provozovat něco takového nad Měsícem by bylo náročné a ani nedám ruku do ohně za to, že se něco takového opravdu pro Apollo zamýšlelo, možná to byl nápad z kategorie „biopsie na Skylabu“, který pohřbila demonstrace jednoho z tvůrců, provázená bolestivým křikem 🙂
Neměl by být problém vypočítat zda dron o dané váze a průměru rotoru má šanci udržet se ve výšce.
Takyto lietajuci dron by bol asi na dlho jedinou alternativou na prieskum dier/prievalov na Marse, kde by mohol byt pripadny zivot lepsie chraneny pred ziarenim. Takze by to isto bola pre vedcov velmi zaujimava alternativa prieskumu. Obzvlast, ak by bol vybaveny hoci aj jednoduchym zariadenim na odber vzorkov a ich prepravu k roveru na dalsiu analyzu. Taktiez aj z dovodu pripadneho vybudovania nejakej zakladne v buducnosti.
To by bylo opravdu hodně složité. Takový dron by musel mít velmi pokročilou UI pro navigaci v tak složitém terénu. K tomu by navíc asi potřeboval další orientační senzory pro pohyb ve tmě (radar, sonar..). Pro optické kamery možná reflektory, dále zařízení na odběr nebo přímou analýzu vzorků aj.
Takže by dron měl značnou hmotnost a hlavně spotřebu energie. Baterie by musely vydržet, než přístroj zase vyletí ven (nebo by se musel použít úplně jiný, autonomní zdroj energie). Během akce by také byl problém s komunikací.
Ale, možná jednou v budoucnu…
Myslim, ze ani nie. Uz dnes existuju drony, ktore su schopne sa same vyhybat stromom a inym prekazkam. A to je – aj s ohladom na posobenie vetra, povedal by som, ze uplne iny level, nez povrch Marsu. V principe staci nejaky lidar alebo stereoskopicky system (opticky/infra), akcelerometer, gyroskop a pocitac. Dron by sa nevzdaloval prilis od svojej pohyblivej zakladne, takze by nemusel mat problemy sa vratit a doplnit energiu. Komunikovat so Zemou pren zmysel nema – staci komunikacia s vozidlom pocas priblizenia, pristatia a startu a vymena nazbieranych dat pocas nabijania.
…zepředu a zboku je plošinka pro dron vybavena závěsy (jejich pohyb je patrně ovládán pohony zespodu plošinky), a tedy se dají tyto bočnice sklopit. Přední současně prostřednictvím trámcové konstrukce přidržuje střed rotoru a boční (resp. její pomocný sloupek vzadu) listy rotoru. Vlastní bočnice pak přidržují tělo dronu.
Plošinka je docela vysoko a na spodní strana podle všeho není uzpůsobena pro položení na povrch (jsou tam ty pohony), tedy očekávám vykládku (po odklopení bočnic) ramenem.
Myslím, že takový dron by dobře posloužil pro krátkodobé lety určené k průzkumu okolí roveru, takové létající oko. Pokud by vždycky přistál zpátky na rover anebo by si ho rover vyzvednul, mohl by se dobíjet z roveru. Řízení by také mohl obstarat počítač roveru.