
Všechna vozidla, která kdy brázdila zemský povrch využívala gravitace, která je přitahovala k zemi, na které se otáčela kola. Tento princip se používá i u robotických vozítek, která zkoumají Mars. Na osvědčené metodě se na první pohled nemusí nic měnit. Ovšem jen do té doby, dokud nejsme konfrontováni s potřebou průzkumu úplně nového prostředí. Dají se rovery použít i pro průzkum podpovrchových oceánů na Europě, nebo Enceladu? Dají, jen je potřeba je obrátit.
Vědci s Jet Propulsion Laboratory přišli s originálním návrhem roveru, který by mohl zkoumat tyto podivné světy. Problém s absencí pevného podloží, po kterém by mohl rover jezdit se podařilo vyřešit originálně – místo, aby vozítko brázdilo „podlahu“, posadili jej odborníci na „strop“, tedy na spodní část ledového krunýře. O dostatečný přítlak se postaralo konstrukce, která se ve vodě díky své hustotě vznáší. Síla, která rover tlačí vzhůru, je dostatečná k vytvoření přítlaku pro kola.
Technici už prototyp tohoto vozítka vyzkoušeli v ledovém jezeře u aljašského města Barrow, kde měli vědecké úkoly – zkoumal výrony metanu ze dna jezera. První návrh byl s povrchem spojený kabelem, druhý už fungoval bezdrátově. Podvodní rover disponuje pouze dvěma koly, která se mohou otáčet nezávisle na sobě. Otočné jsou i dvě poloosy, které mohou být osazeny světlomety, kamerami, nebo dalšími vědeckými přístroji.
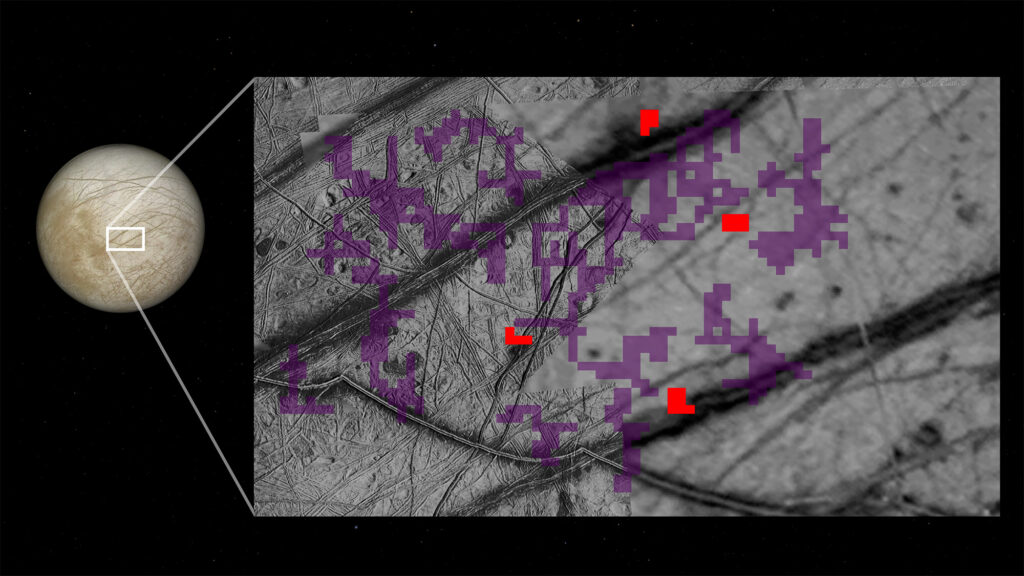
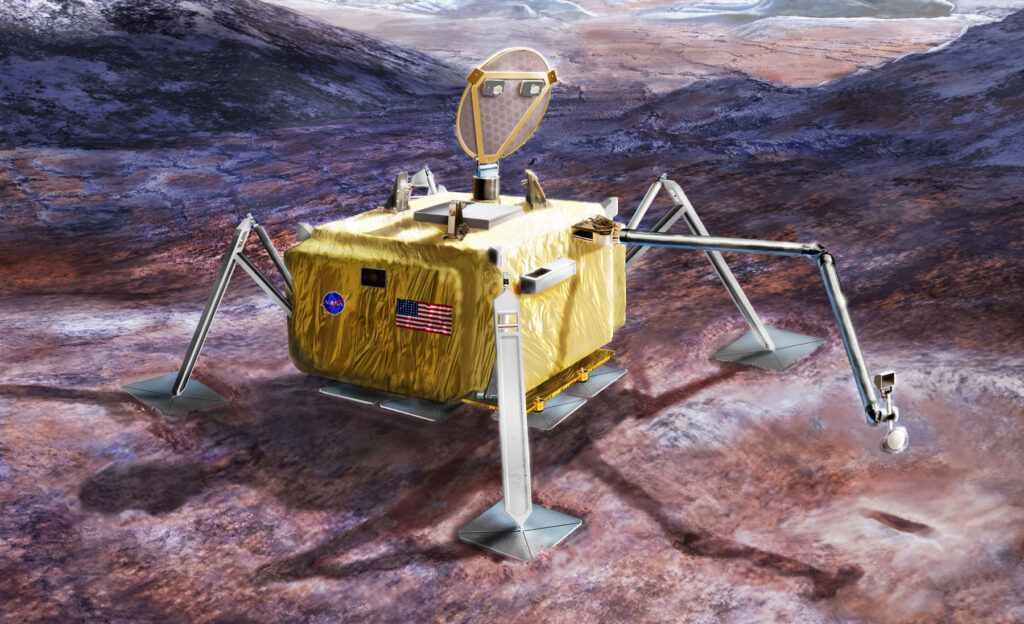
Zda se tento zajímavý koncept ujme zatím nevíme. NASA sice uvažuje o průzkumu ledového měsíce Europa, ale nejspíše z oběžné dráhy v ideálním případě z povrchu. Na výpravu pod ledový krunýř je ještě daleko. Nicméně je dobře, že už nyní vznikají návrhy, jak si poradit s tímto nezvyklým prostředím.
Zdroje informací:
https://www.youtube.com/
Zdroje obrázků:
http://images.bwbx.io/cms/2014-06-25/0625_nasa_rover_inline_630.jpg



{kind=link}
Ahoj, trochu ot ale víte že nasa zveřejnila všechny forky z mise apllo?
https://www.flickr.com/photos/projectapolloarchive/albums
No a co brání udělat prostě obyčejnou ponorku ?
Tomu brání zejména chabé financování planetárního výzkumu.. Ale i o ponorce (pro Titan) už se uvažuje (myslím i tady na kosmonautixu je k tomu článek).
Rover naruby je prostě další zajímavá varianta, jak zkoumat cizí světy. Oproti ponorce bude mít i jednodušší pohon a snadnější orientaci v prostoru (odpadá celá jedna osa – hloubka). Do hlubin by pak mohl uvolnit samostatnou mikrosondu – představte si vzrušení při takové misi, jak bychom hltali poslední bity informací proudící skomírajícím signálem ze stále větších hlubin Europy!
No nic, prozatím sci-fi… : )
Podle jednoho z plánů měl být start mise Cryobot/Hydrobot kolem roku 2010… Cryobot by se pomocí ohřívané špice pomalu prodral přes ledový příkrov Europy a poté by do oceánu vypustil ponorku Hydrobot. Hodně optimistický termín na tak složitou misi.
Pokud jde o jezera na Titanu, tak tady vědecké týmy nápady nešetří. Od neřiditelného plavidla poháněného jen větrem (TiME), přes další, které by mělo být poháněno nějakými kolesy jako parník nebo šroubem (TALISE), až po zmiňovanou ponorku, kde je plán opravdu velkorysý. 90 dní a 2000 km (slovy: dva tisíce km) na hladině nebo pod hladinou. Takže průměrně by to bylo 22 km denně. NASA vždy své projekty úmyslně podceňuje, ale tady to asi trochu přehnali. I když… co já vím 🙂
No, obávám se, že 2000 km asi žádné jezero na Titanu není… Jinak, škoda ho, tohle je asi docela reálný projekt.
No samozřejmě ta vzdálenost 2000 km není uvažována z bodu A do bodu B přímo. Ponorka by brázdila hladinu nebo hlubiny Kraken Mare, které má 400 000 km čtverečních, takže by rozhodně měla dost prostoru k seberealizaci. A samotný projekt nereálný není, představit si ho umím a pokud bude nadpřirozeně spolehlivá, tak ty kilometry třeba i zvládne. I když z našeho dnešního pohledu to vypadá fakt velmi odvážně.