
Po neuskutečněném testování manévrovací jednotky AMU v rámci programu Gemini se raketová křesla zdánlivě vytratila z amerického pilotovaného programu. Ovšem slovo „zdánlivě“ je zcela na místě. Na pozadí triumfálních lunárních expedic se totiž rozehrával zápas o další směřování agentury. Původně měl program Apollo po své lunární etapě vyústit v ambiciózní Apollo Applications Program (AAP), který měl využívat stávajícího i nově zkonstruovaného hardwaru pro širokou paletu úkolů. Mezi jinými byl v programu zahrnut i teleskop, jehož základna konstrukčně vycházela ze vzletového stupně lunárního modulu, nebo pilotovaný oblet Venuše. Nakonec však AAP padl za oběť razantním rozpočtovým škrtům a zbyla z něj pouze orbitální stanice, jež dostala název Skylab. Současně NASA začala pracovat na raketoplánu – novém prostředku, jenž by vynášel opakovaně na orbit nejrůznější náklady při nízkých provozních cenách. Pro uvažované využití raketoplánu bylo nutno zajistit prostředek, pomocí něhož by se astronauti mohli pohybovat v prostoru. A jak se ukázalo, Skylab byl ideální platformou pro testy prototypů těchto prostředků…
Skylab: ASMU a FSMU
Když se 14. května 1973 vydával vzhůru ze startovní rampy 39A na Cape Kennedy poslední ze série mamutích Saturnů V, na špici nesl pozůstatek kdysi ambiciózního programu Apollo Applications Program. Onen pozůstatek nesl název Skylab a jednalo se na dlouhou dobu o největší orbitální stanici vůbec (objem přetlakové části Skylabu činil neuvěřitelných 361 m3, přičemž tento rekord překonala až v roce 1996 stanice Mir po připojení posledního modulu Priroda). Na délku měřila obytná a pracovní část přibližně 25 metrů a v nejširším místě měla průměr zhruba 6 metrů. Právě onen olbřímí vnitřní prostor byl ideálním „hřištěm“ pro testy zařízení a pomůcek pro pohyb ve stavu beztíže.
Na své palubě nesl Skylab dva velmi zajímavé experimenty, jež se právě pohybu v podmínkách mikrogravitace týkaly, ovšem ještě než se k nim mohli astronauti dostat, bylo třeba samotný Skylab zachránit.
Několik desítek sekund po startu se totiž předčasně o několik centimetrů oddělil od trupu stanice protimeteoroidní štít. Původně se tak mělo stát až na orbitu, ve skutečnosti si pro svoji aktivaci vinou poruchy vybral tu nejméně vhodnou dobu. Startovní sestava zrovna procházela tzv. MaxQ, tedy nejvyšším dynamickým namáháním. Obrovský tlak nedokázal štít vydržet a promptně se odporoučel do oceánu. A co hůř – s sebou strhnul i jedno křídlo slunečních baterií.

Zdroj: spaceflight.nasa.gov
Když se tedy Skylab ocitnul konečně na oběžné dráze, operátoři v řídicím středisku mohli jen nevěřícně sledovat, jak se Skylab začíná potýkat s nedostatkem elektrické energie a teplota na jeho povrchu i v interiéru začíná stoupat do nepředpokládaných hodnot. V zákulisí se rozběhnula horečná aktivita s jediným cílem – zachránit Skylab. Mnozí toto deset dnů trvající období srovnávají s „hvězdnými hodinami“ v dubnu 1970, kdy se hrálo o život tří astronautů na palubě Apolla 13. V pátek 25. května pak startuje mise SL-2, během níž se mají Pete Conrad, Joe Kerwin a Paul Weitz pokusit zachránit stanici pro další provoz. To se nakonec mimo jiné i díky velmi neortodoxním postupům daří a navíc Pete Conrad a jeho parta dokáží splnit téměř všechny experimenty, jež byly původně v plánu. Po 28 dnech jejich kosmická pouť končí úspěšným přistáním v Pacifiku.
Krom celého spektra zařízení a aparatur se znovuobnovením provozuschopnosti Skylabu podařilo zachránit i dva experimenty, skrývající se pod nicneříkajícími názvy M509 a T020. Jeden z nich se později stal základem pro první prakticky použitelné raketové křeslo, zatímco druhý se ukázal být slepou uličkou v pravém slova smyslu.
M509 byl experimentem, jejž na svět přivedl Charles „Ed“ Whitsett. Charlese již od mládí fascinovala idea raketového křesla, toto téma si dokonce zvolil jako námět své diplomové práce v roce 1960 ještě jako aspirující inženýr letectva. V polovině šedesátých let se jako jeden ze zástupců USAF dostal ke spolupráci s NASA v rámci společných experimentů. Coby uznávaný expert ve svém oboru dostal za úkol navrhnout model raketového křesla, na němž by bylo možné uvnitř Skylabu ověřit všechny potřebné parametry, technologie a postupy. K ruce mu byl přidělen mladý astronaut Bruce McCandless (přesně ten McCandless, který vykonával funkci CapComa během historické lunární vycházky Neila Armstronga a Buzze Aldrina).

Zdroj: nasa.gov
Whitsett spojil síly s firmou Martin Marietta a v roce 1970 bylo hotovo: světlo světa spatřila jednotka ASMU („Astronaut Stabilized Maneuvering Unit – stabilizovaná manévrovací jednotka astronauta“). Jednotka měla podobu „batohu“ s vyčnívajícími dvěma područkami, jež bylo možno sklopit směrem dolů a na nichž byly umístěny ovládací prvky. Astronaut „seděl“ na malém pahýlovitém sedátku, čnícím nad spodní hranou přední strany. Uvnitř křesla se ukrývala nádrž o objemu 24 litrů, obsahující ve svých útrobách zásobu dusíku pod tlakem 20,6 MPa, což postačovalo na fungování přibližně po dobu 20 minut. Nádrž bylo možné znovu naplnit přímo na palubě Skylabu. Jako pohonné médium ovšem mohl být použit i kyslík, v tom případě byl přiváděn do ASMU prostřednictvím 10 m dlouhé hadice z palubních zásob stanice. Z nádrže (eventuálně z kabelu) bylo médium soustavou ventilů a regulátorů přiváděno ke čtrnácti pohonným tryskám na povrchu křesla. Stabilizace byla zajištěna s využitím tří dvoukolových gyroskopů firmy Sperry, jež se pomocí elektromotorů roztáčely až na 22 500 ot/min. Pokud se obě kola z dané dvojice otáčela shodnou rychlostí, byla tím zajištěna stabilizace celého ASMU v dané ose. Rozdílné rychlosti pak umožňovaly změny polohy osy. Elektrickou energii získávalo křeslo ASMU z nikl-kadmiové baterie, zajišťující dodávku proudu o napětí 28 V po dobu zhruba 1 hodiny. Baterii bylo možno znovu nabít a astronauti měli k dispozici i náhradní kusy.
ASMU bylo možno ovládat pomocí ovládacích prvků na výše zmíněných područkách. Pravá područka nesla na svém konci „joystick“, páku, ovládající polohu křesla v prostoru, tedy klopení, klonění a bočení. Levá područka pak obsahovala páčku ve tvaru „T“ ovládající translaci nahoru/dolů, dopředu/dozadu a do stran. Současně jí bylo možno i pootočit, tento pohyb pak vyvolal uzavření jednotlivých ventilů a sloužil pro situace, kdy by se bylo třeba vypořádat s tryskou zaseknutou v poloze „otevřeno“. Na madle se také nacházelo tlačítko, které bylo zamýšleno jako ovladač vysílačky, nicméně nakonec bylo využíváno jako „marker“ pro zaznamenání začátku či konce daného manévru. V souvislosti s rozložením ovládacích prvků pro pohyb je zajímavé, že naprostá většina kosmických strojů má stejné rozložení ovládacích prvků ve smyslu pravá ruka/orientace v prostoru – levá ruka/translace. Je to dáno především tím, že většinou jsou u řízení kosmických „udělátek“ muži a ženy se zkušenostmi v řízení letounů a právě u letounů je použita stejná logika – pravá ruka bývá na řídicí páce (ta ovládá postavení letounu v prostoru) a levá na páce plynové přípusti (ta zase ovládá „translaci“ letounu, tedy lépe řečeno jeho rychlost v prostoru).
Na levé područce bychom ještě našli dva spínače, sloužící jako hlavní vypínač a vypínač pro aktivaci gyroskopů. Krom těchto prvků levá područka obsahovala také otočný volič módů fungování ASMU; kontrolky, upozorňující na dosažení nominální rychlosti gyroskopů a limitu otáčení v dané ose a také sdružený ukazatel tlaku pohonného média a napětí v elektrické síti ASMU. Přestože celý stroj vypadal možná malinko nemotorně a rudimentárně, zajišťoval možnost fungování v několika různých módech.

Zdroj: airandspace.si.edu (kredit: Smithsonian)
Prvním módem byl tzv. „Direct mode (Přímý mód)“. Umožňoval přímé ovládání křesla astronautem pomocí ovládacích prvků bez jakéhokoli přispění stabilizačního systému ASMU. Astronaut mohl dosáhnout maximálních úhlových rychlostí 13°/s v klonění a 11°/s v klopení. Direct mode měl sloužit spíše jako evaluace nouzové situace v případě poruchy stabilizačních systémů. Druhou možností, již měl astronaut možnost zvolit, byl tzv. „Rate gyro mode“. V tomto případě se do situace vložily i výše popsané gyroskopy, které spolupracovaly s tryskami pro udržení odchylky zadané ovládacím joystickem. Výchylku joysticku elektronika „zanesla“ do setrvačníků a současně do trysek. Ty fungovaly do okamžiku, než byla výchylka gyroskopu nulová a křeslo tak udržovalo danou polohu či udržovalo míru úhlového otáčení do hodnoty 20°/s. Po puštění joysticku se křeslo zastavilo v momentální poloze a setrvalo v ní díky pulzům trysek pohonného systému. Posledním funkčním módem byl „Control moment gyro mode“. Ten byl už čistě doménou gyroskopů, kdy výchylka joysticku už nedávala povel tryskám, ale pouze elektromotorkům závěsů setrvačníků. V tomto módu gyroskopy udržovaly nejen polohu křesla v prostoru, ale byly schopny křeslem také otáčet do požadované polohy rychlostí až 5°/s, přičemž spotřeba paliva byla nulová, na druhou stranu se příslušně zvedla spotřeba elektrické energie.
Příkladem toho, že špatné nápady mají někdy poměrně tuhý kořínek, je i zařazení doplňkového zařízení k ASMU. Byla jím nám již známá „pistole“ HHMU. Měla využívat pohonného média ze zásob křesla a její tvůrci se evidentně stále ještě nedokázali vzdát představy pistole jako jednoduchého a „blbuvzdorného“ prostředku k pohybu astronautů. HHMU byla téměř identická s těmi, jež byly součástí experimentů programu Gemini. Základem byla rukojeť se spouští a voličem, pomocí něhož mohl astronaut přepnout směrování pohonného média – buďto do dvou „tažných trysek“ ve výklopných ramenech nebo do jedné „tlačné“ trysky v čele přístroje. Tah trysek mohl astronaut dávkovat úrovní stlačení spouště. S křeslem byla HHMU spojena pomocí krátké hadice. Systém ASMU a HHMU dohromady byl nazýván AMRV („Astronaut Maneuvering Research Vehicle – výzkumný manévrovací prostředek astronauta“).

Zdroj: airandspace.si.edu (kredit: Smithsonian)
Poprvé vzal ASMU na „projížďku“ v polovině srpna 1973 Alan Bean, velitel druhé expedice na Skylabu. V plánu byly lety jak v běžném oblečení, tak v natlakovaném skafandru. Postupně byly během druhé a třetí expedice vyzkoušeny veškeré režimy a možné situace, jež by při ostrém nasazení přicházely v úvahu. ASMU se vyznamenalo dokonce i v záludném testu, který simuloval zachycení nestabilního pasivního tělesa. Jeden z astronautů u „stropu“ stanice roztočil válcovou nádrž na vodu a „pilot“ ASMU k ní doletěl, vyrovnal rychlost otáčení s nádrží (tj. pomalu kolem ní rotoval), poté ji jemně zachytil rukama a zastavil pomocí křesla rotaci.
S křeslem byli astronauti druhé expedice SL-3 (podivné číslování je způsobeno tím, že samotné vypuštění Skylabu bylo počítáno jako mise SL-1) spokojeni natolik, že nalétali celkem 8 hodin během šesti letů, přičemž v plánu byly původně pouze čtyři lety. Za zaznamenání jistě stojí fakt, že si křeslo ve všech režimech vyzkoušel i Owen Garriott, který s ASMU před misí vůbec netrénoval a de facto v něm poprvé seděl až přímo na Skylabu. Přes nulovou přípravu byl po krátké době schopen „odvést slušnou práci“, křeslo bylo podle jeho slov velmi dobře ovladatelné.
Třetí a poslední expedice SL-4 měla v plánu osm letů s ASMU, nakonec se podařilo kvůli malé časové rezervě provést pouze pět letů o trvání 5 hodin a 23 minut. Stejně jako předchůdci, i posádka SL-4 však pěla na ASMU jen samou chválu. Velitel Jerry Carr se nechal slyšet, že by ASMU „vzal v současné podobě klidně ven bez poutacího lana“. Nejvíce si astronauti oblíbili mód „Control moment gyro mode“, který vykonával požadované obraty hladce a přesně, nejméně oblíbený byl „Direct mode“.
Během testů ve skafandru zjistili astronauti, že lano, jež vedlo do jejich obleků kyslík, svou rigiditou znesnadňuje provádění manévrů a tím zkresluje výsledky. Astronauti situaci vyřešili ve spolupráci s řídicím střediskem jednoduše – z lana „odloupli“ hadici s chladicí vodou a kabel s elektrickou energií. Několikrát také na kabel úplně rezignovali a spokojili se pouze s nouzovou nádrží kyslíku SOP.

Zdroj: spaceflight.nasa.gov
Jediná součást křesla, která působila rozpaky, byla podle předpokladů pistole HHMU. Testy na Skylabu prokázaly, že manévry s její pomocí jsou nepřesné. Nebylo možné se pomocí HHMU otáčet pouze v jedné ose a pokud chtěl astronaut s HHMU přelétnout byť krátkou vzdálenost, musel počítat s nepříjemnými odchylkami od plánované trajektorie. Zatímco v normálním oblečení byla práce s HHMU alespoň částečně přínosná, v natlakovaném skafandru byla víceméně nepoužitelná. Jednalo se nadlouho o labutí píseň HHMU, která se tím zařadila mezi další neúspěšné projekty z dílny techniků, až příliš zamilovaných do sci-fi románů. Podle Jerryho Carra to byla druhá nejhorší položka na seznamu experimentů s pohybem prostoru v rámci Skylabu. Ano, čtenáři čtou správně, byla až druhou nejhorší, protože o neslavný primát ji v tomto ohledu připravil experiment s označením T020.
Už v roce 1965 začal Don D. Bird ve středisku NASA v Langley zpracovávat první ideje, týkající se prostředku pro přesun a manévrování astronautů, jejž by bylo možné ovládat nohama. Koncept, zvaný „Jet Shoes (tryskové boty)“, měl využívat dvou trysek, po jedné pod každým chodidlem astronauta. K aktivaci by byly využívány jednoduché spínače, přičemž o trajektorii letu by se postaral astronaut sám natočením nohou. Výhodou by byl fakt, že astronaut by měl zcela volné ruce.
V roce 1966 dostalo zelenou další rozpracování onoho konceptu s tím, že experiment bude zařazen do programu Apollo Applications. Proti zařazení se ovšem postavili zástupci Manned Spacecraft Center, konkrétně Deke Slayton, podle něhož byl experiment odsouzen předem k neúspěchu vzhledem k nulovému výhledu astronautů směrem dolů. Celkově se pracovníci MSC vyjadřovali skepticky k cílům i nákladům experimentu. „Jet Shoes“ však v letovém manifestu zůstaly i nadále a nakonec se v útrobách Skylabu vydaly do vesmíru v podobě zařízení zvaného FSMU („Foot-Controlled Maneuvering Unit – nohama ovládaná manévrovací jednotka“) a testy tohoto zařízení byly v letovém plánu označeny kódem T020.
Vedoucí projektu Donald E. Hewes z Langley spolu s koncernem Martin-Marietta připravili zajímavý stroj, který ze všeho nejvíce asi připomínal Večerníčkovu jednokolku či jakési podivné bidýlko s pedály. Jednotka FSMU sestávala ze sedla spojeného s pedály, pod kterými se nacházely dvě čtveřice trysek, a batohu s baterií a nádrží na stlačený dusík. Posledně dvě jmenované položky si FSMU „půjčovala“ od ASMU (nádrž i baterii bylo možné z ASMU jednoduchým způsobem vymontovat pro jednoduché dobití a naplnění).
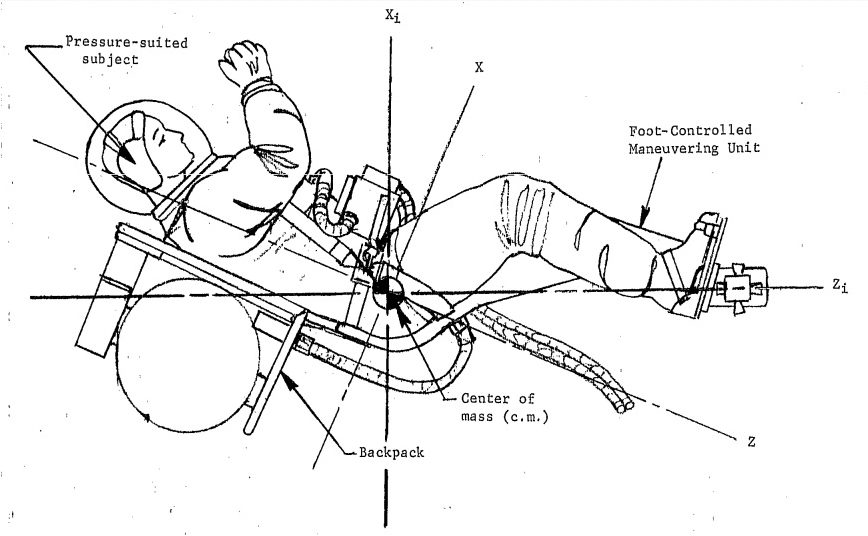
(kredit: NASA/D. Hewes, K. Glover)
Trysky byly pod pedály uspořádány tak, aby vektor jejich tahu procházel 0,9 m pod těžištěm astronauta. Jejich rozmístění sice umožňovalo otáčení kolem libovolné osy, ovšem translace byla možná pouze ve směru nahoru/dolů. K letu jiným směrem bylo třeba zaujmout odpovídající polohu v prostoru kombinací klonění, bočení nebo klopení. K zahájení letu očekávaným směrem měla astronautům sloužit poměrně neintuitivní logika ovládání pedálů, které mohly být stlačeny špičkou nohy, celou nohou nebo bylo možné špičku či nohu na pedálu naopak zvednout. Například pro otočení doprava musel astronaut zvednout levou špičku nohy a současně sešlápnout pravou špičku nohy zároveň se sešlápnutím celého pravého pedálu dolů. Celé zařízení mělo hmotnost 66 kg a tvůrci do něj vkládali velké naděje.
Ty se však v realitě nenaplnily. Druhá expedice vykonala oba dva naplánované lety, třetí expedici se podařilo vykonat pouze dva ze tří plánovaných letů. Lety byly prováděny jak v běžném oblečení, tak ve skafandru, přičemž zejména druhá varianta byla astronauty hodnocena jako „useless (k ničemu)“. Al Bean, velitel druhé expedice, si stěžoval mimo jiné na nedostatečný poutací systém, kvůli kterému během impulsů trysek doslova „plápolal“ na vratkém vehiklu. Třetí expedice proto FSMU upravila přidáním dalšího pásu a problém tím byl vyřešen.
Horší to ovšem bylo s celkovou použitelností jednotky FSMU. Chyběl u ní systém, jenž by stabilizoval polohu astronauta v prostoru, a protože trysky pálily jednotlivě a nikoli v párech, každý pokus o otočení nebo zastavení pohybu vyústil v „driftování“ nechtěným směrem a nezamýšlenou rotací kolem jiné osy, než bylo původně v úmyslu. Také let směrem k cíli postrádal přesnou trajektorii. Paradoxně, přestože nejlepším způsobem, jak se k cíli dostat, byl let nohama napřed, viditelnost směrem dolů byla zejména v helmě mizerná.

Zdroj: spaceflight.nasa.gov
Protože FSMU neumožňovalo let ve formaci s cílovým tělesem, astronauti hodnotili možné použití v ostrém nasazení během EVA jako „nebezpečné“. Al Bean vyjádřil názor, že „neexistuje žádná výhoda, která by ospravedlňovala použití zařízení ovládaného nohama. I v křesle M509 s jeho područkami máte cíl, na kterém potřebujete pracovat, přímo před obličejem. Područky při práci vůbec nevadí.“ Naproti tomu Jerry Carr byl smířlivější, když řekl: „Opravdu si myslím, že jednou někdy někdo přijde na způsob, jak zapojit nohy. Nejsem připraven celou ideu T020 smést ze stolu.“ Ovšem i přes smířlivá slova byl i Carr přesvědčen, že FSMU ve stávající podobě je nepoužitelným kusem vybavení.
Stran programu Skylab lze mít ohledně prostředků pro pohyb v prostoru smíšené pocity. Na jednu stranu se v případě HHMU a FSMU jednalo o Cimrmanovské „pionýrství slepých uliček“, na stranu druhou křeslo ASMU potvrdilo své kvality a očekávání do něj vkládaná v několika aspektech dokonce překonalo. Zřejmě nejvíce smíšené pocity ze všech zúčastněných však musel mít Bruce McCandless. Jako člověk, který měl na vzniku ASMU spolu s Chalresem Whitsettem největší podíl, v koutku duše očekával, že dostane místo v některé z posádek Skylabu. Jeho naděje se nenaplnily a Bruce se mohl z řídicího střediska jen dívat, jak jeho kolegové prohánějí křeslo obřím interiérem Skylabu. ASMU nicméně položilo solidní základy skutečně použitelné manévrovací jednotce, která se do volného prostoru měla dostat o jedenáct let později. A Bruce McCandless měl být tentokrát konečně u toho…
(článek má pokračování)
Zdroje obrázků:
http://www.nasa.gov/sites/default/files/sl2-7-633.jpg
http://spaceflight.nasa.gov/gallery/images/skylab/skylab2/html/sl2-04-264.html
http://www.nasa.gov/audience/foreducators/spacesuits/historygallery/sky-aug73_prt.htm
http://airandspace.si.edu/collections/artifact.cfm?object=nasm_A19761951002 (kredit: Smithsonian)
http://airandspace.si.edu/collections/artifact.cfm?object=nasm_A19840161000 (kredit: Smithsonian)
http://spaceflight.nasa.gov/gallery/images/skylab/skylab4/html/s74-17305.html
Development of Skylab Experiment T020 Employing a Foot-Controlled Maneuvering Unit (kredit: NASA/D. Hewes, K. Glover)
http://spaceflight.nasa.gov/gallery/images/skylab/skylab3/html/sl3-108-1304.html







Len chcem napísať, že opäť je to vynikajúca práca!
Díky, vážím si toho! 😉