„Dnes je to už týden, co jsem v Montrealu. Bydlím v půvabné čtvrti Plateau Mount Royal a celé dny trávím výcvikem v robotice v Kanadské kosmické agentuře. Prozatím jsem se neodvážila vydat se mimo trasu, po které dojíždím do práce, s výjimkou krátkých procházek do blízké kavárny na snídani. Můj malý každodenní rituál, který se každé ráno postupně posouval s tím, jak jsem pomalu trávila šestihodinový časový posun z Evropy. Je mi potěšením prozkoumávat malebné ulice obklopené stromy a řadovými domy, kde má každý unikátní fasádu a venkovní schodiště vedoucí do vchodu samostatného druhého patra. Ať už rovné či zatočené, jednoduché či komplikované, tato schodiště vykouzlují dynamiku, která ladí s barvitým životem sousedství.
Neděle 13. května 2012
Je to nádherný způsob jak začít den před mou cestou do budov a zařízení Kanadské kosmické agentury, kde cvičím na robotickém manipulátoru Mezinárodní vesmírné stanice (SSRMS – Space Station Robotic Manipulator System) známého spíše jako Canadarm2. Pokud vás někdy napadlo, jak mohla být čtyř set tunová konstrukce postavena na oběžné dráze, krátká odpověď zní: kousek po kousku za pomoci SSRMS. Canadarm2 si můžete představit jako robotickou repliku vaší vlastní paže ve větším měřítku. Má rameno, loket a zápěstí. Stejně jako vaše paže má také dvě rovné dlouhé části spojené klouby. A stejně jako vaše paže může ohnout loket a točit se v rameni a zápěstí v jakémkoli směru. V konstruktérském žargonu bychom řekli, že má sedm stupňů volnosti, ačkoli můžeme uzamknout jeden stupeň volnosti, abychom robotickou paži donutili pohybovat se více pod naší kontrolou. Stanice je totiž drahocenná a náraz do ní nepřipadá v úvahu.
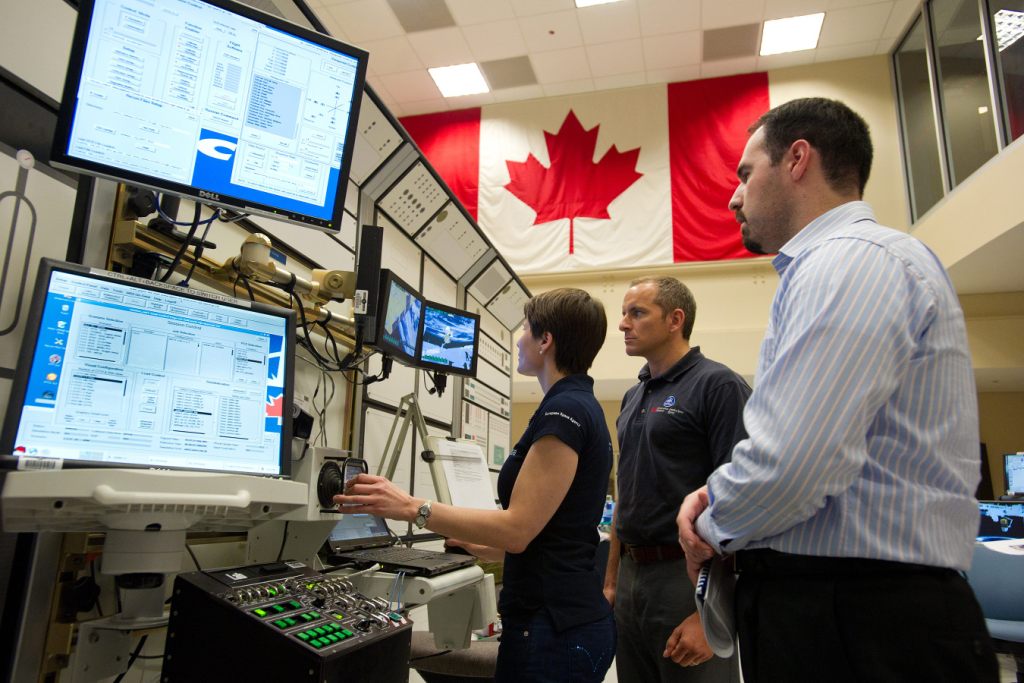
Kanadská kosmická agentura má k dispozici ovládací panely robotického ramene stejné jako ty nacházející se na oběžné dráze, aby mohla cvičit budoucí posádky ISS s prací na SSRMS. Je zde ruční ovládání pro posun a rotaci, počítač a ovládací panel pro konfiguraci systému a vkládání příkazů, a také tři monitory s výstupem obrazů kamer. Samozřejmě zde není žádná opravdová robotická paže. Vše běží na softwarovém simulátoru a kamery ukazují přesně to, co by ukazovaly, kdybyste SSRMS řídili na oběžné dráze.
Zdroj: http://blogs.esa.int/
Typická výuka na simulátoru začíná s něčím, co může vypadat jako hraní si s hračkou. Na malém modelu robotického ramene reprodukujeme počáteční konfiguraci na základě zadaných ohybů každého kloubů. Dívám se na to jako na zahřívací cvičení pro mozek. Pokud stavíte modely, zamilujete si další krok. Abychom si dokázali představit pohyb ramene vzhledem ke stanici, máme ohromně detailní model ISS hned vedle ovládacího panelu simulátoru.

Zdroj: http://blogs.esa.int/
Přiznávám, že jsem zjistila, že se jedná o skutečně nádherný objekt. Model byl ale samozřejmě zamýšlen jako nástroj pro vizualizaci a jako pomůcka pro značnou mozkovou gymnastiku, která má teprve přijít – mentální převrácení obrazů kamer; předpovídání toho, jak bude pohyb manipulátoru vypadat z různých úhlů; identifikace nejlepší kombinace kamer k pozorování vzdálenosti od struktury stanice; přesné určování vstupů ručního ovládání v rozdílných soustavách souřadnic; vizualizace pohybů kloubů – to jsou některé z úkolů, které zaručeně udrží váš mozek ve vysokých otáčkách během toho, co ovládáte robotickou paži.

Zdroj: http://blogs.esa.int/
Po jednom týdnu výcviku začínám být obeznámená se základními nominálními operacemi SSRMS. Teď se těším na nenominální situace, o kterých se budu učit příští týden. Mezi ty mohou patřit různé singularity, nárazy nebo zachycení volně letících objektů. To znamená domanévrovat a ramenem k vesmírné lodi, která není připojena ke stanici, a zachytit ji. Lze očekávat, že zachytávání volně letících objektů se v příštích letech na ISS stane stále častějším. Nejen, že astronauti budou pokračovat v zachytávání a připojování japonské zásobovací lodi HTV, ale také brzy začnou dělat totéž s americkými komerčními zásobovacími loděmi Dragon a Cygnus. První zachycení Dragona se už blíží a myslím, že to bude historický okamžik. Nenechte si to ujít!“
Zdroj informací:
http://blogs.esa.int/
Zdroj obrázků:
http://blogs.esa.int/






