Z letošního roku uplynuly první dva měsíce a naše planeta se na své pouti kolem Slunce dostala do stejného bodu, jako byla před rokem, kdy 18. února 2021 rover Perseverance úspěšně přistál na Marsu, na dně kráteru Jezero. V 6. díle tohoto seriálu si proto posvítíme nejen na události posledních 8 týdnů, ale také na krátký souhrn toho nejdůležitějšího, co se za první rok této úspěšné planetární mise odehrálo.
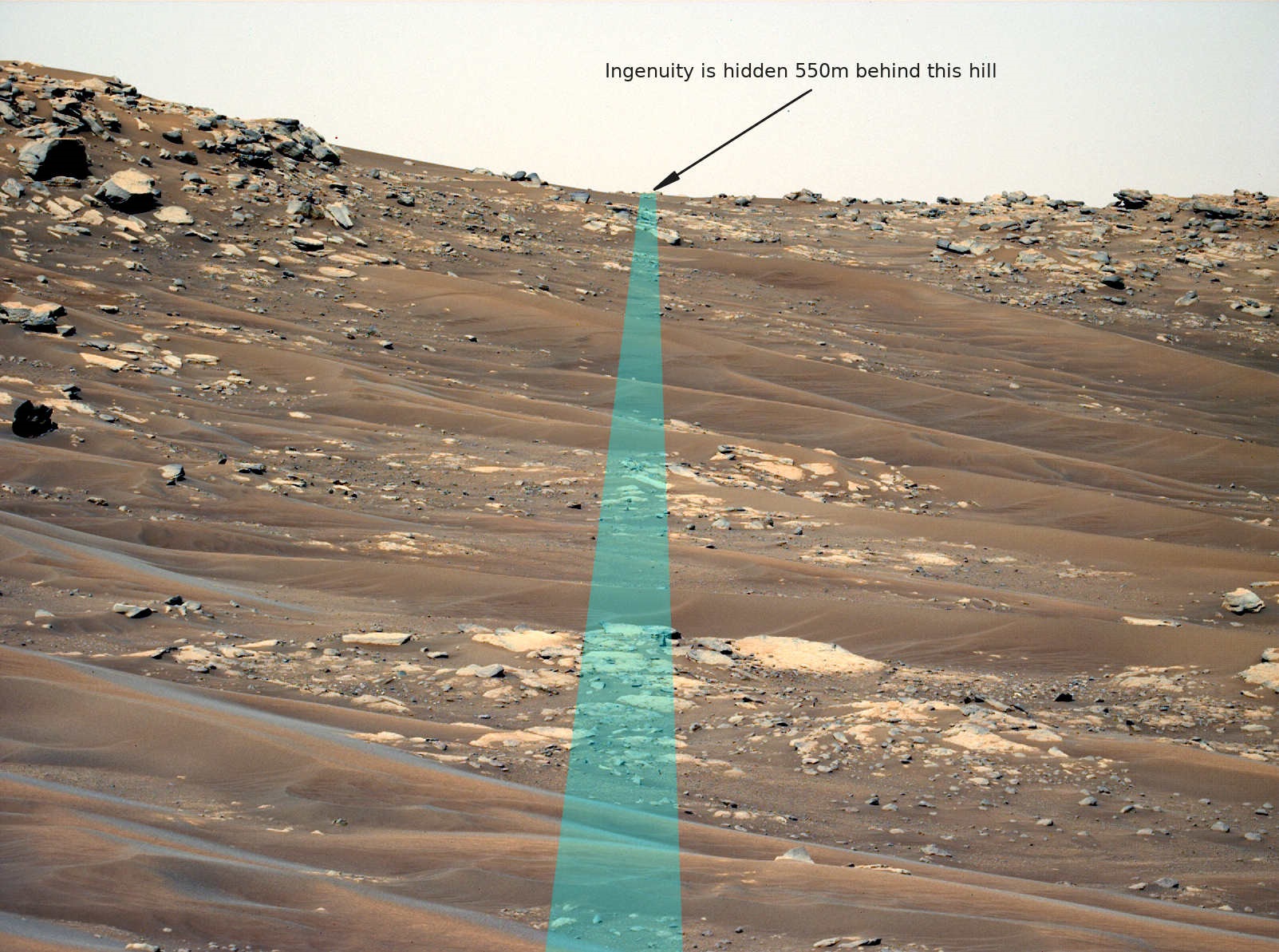
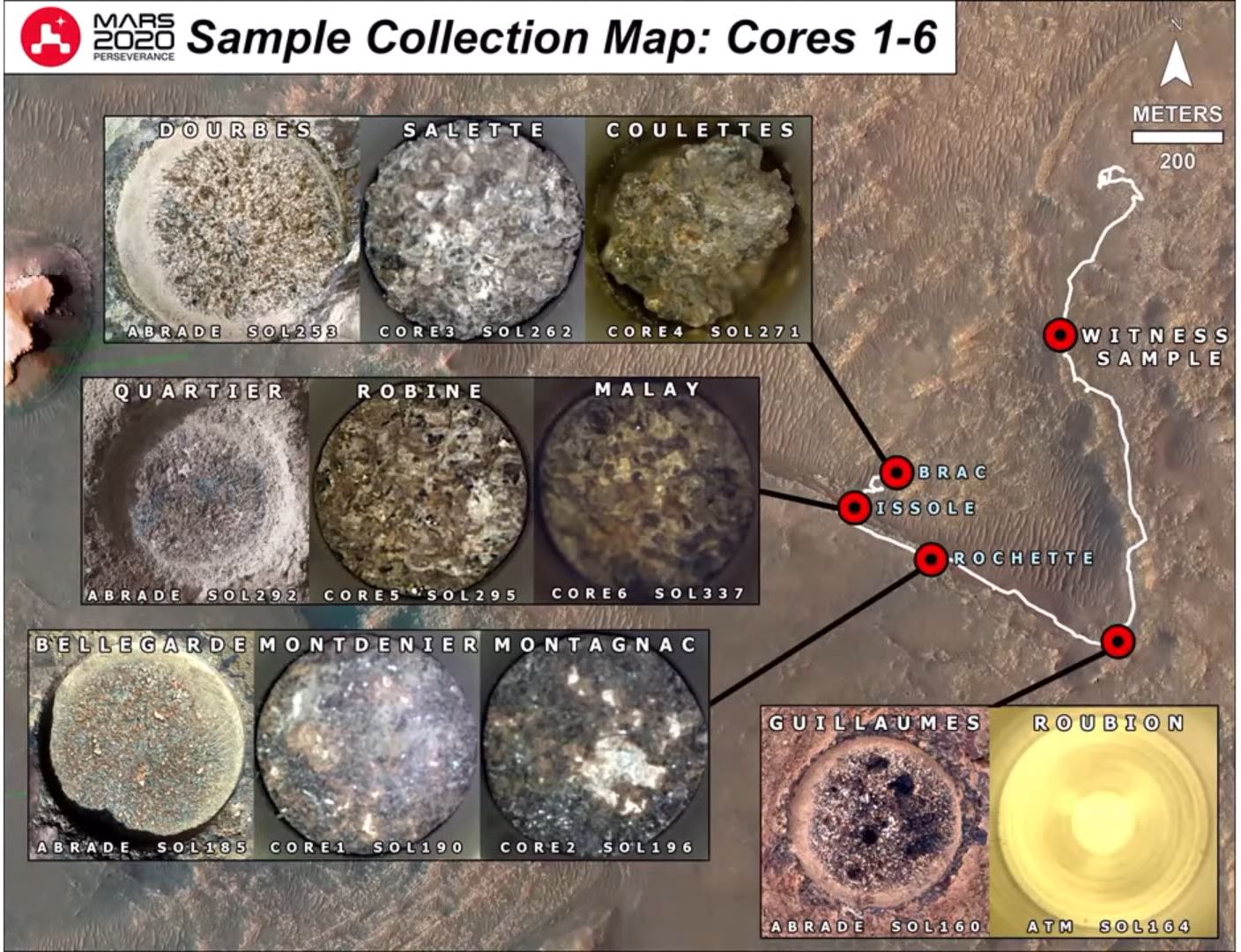
Na konci prosince jsme naše robotické průzkumníky opustili v situaci, kdy měla Ingenuity za sebou 18. let a od solu 292 (15.12) vyčkávala na „letišti L“, kousek od SV okraje dunového pole Séítah. Od Perseverance ji dělila vzdálenost kolem 550 metrů a terénní překážka, což jim ovšem nebránilo ve vzájemné komunikaci, předávání povelů a dat. Rover se poslední prosincový týden stále nacházel u skalního výchozu „Issole“, kde během solu 295 (18.12.) úspěšně odebral svůj 5. pevný vzorek, nazvaný „Robine“.
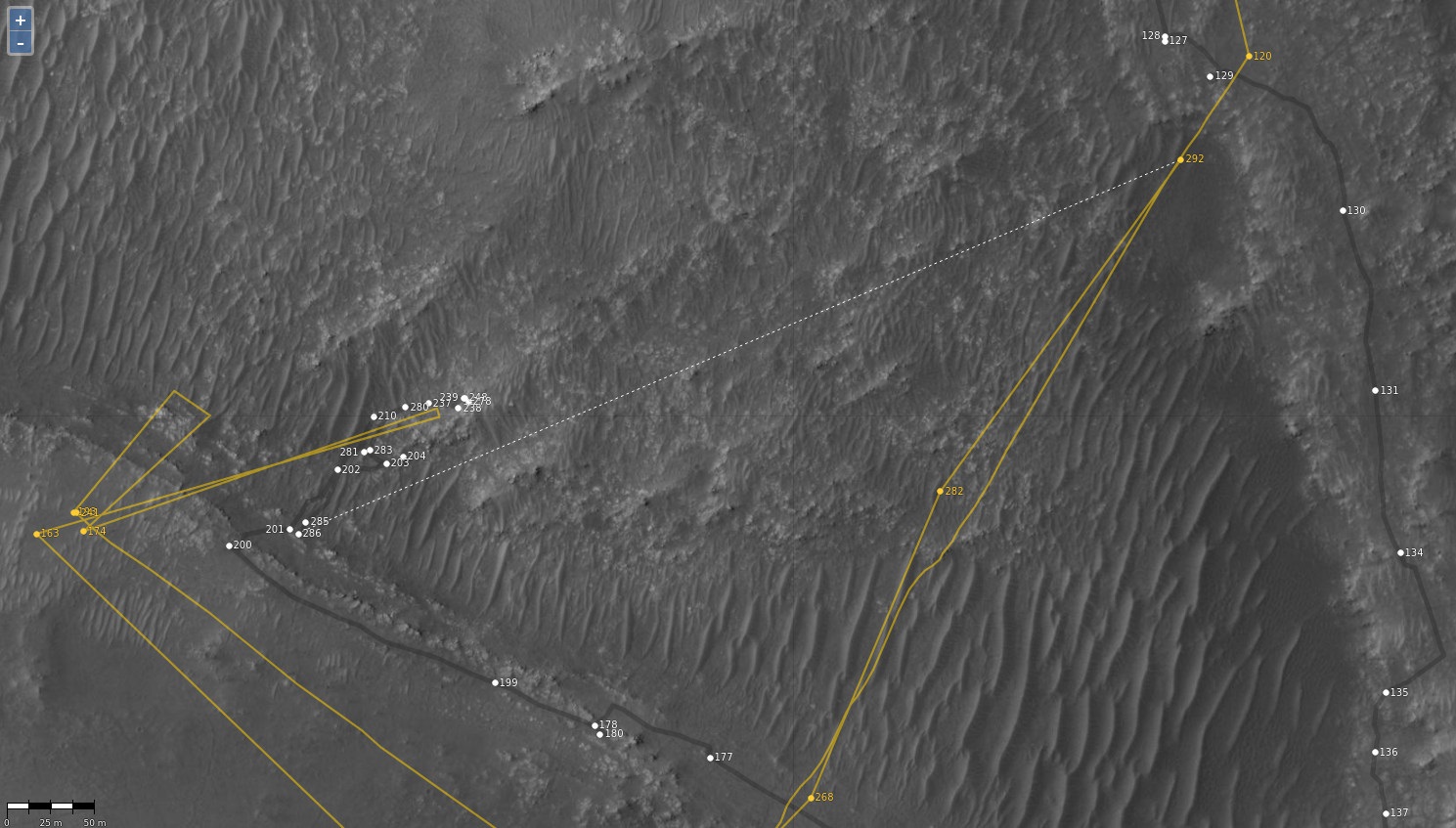
Plán aktivit na přelom starého a nového roku byl poměrně jasný: Percy ještě odvrtá druhý (párový) vzorek ze stejného kamene, než definitivně opustí oblast South Séítah, načež se po svých vlastních stopách vydá na zpáteční cestu k místu přistání. Ingenuity 7. ledna provede svůj 19. let o délce ~62 metrů, kterým dokončí zpáteční přelet písčitých dun a dostane se tak zpět na pevné podloží, blízko původní trasy roveru, který tudy projížděl jižním směrem před 170 soly.
Jak už ale naši čtenáři dobře vědí, Mars dovede nečekaně překvapit a ne vždy úplně příjemně …
Perný začátek nového roku
V první dekádě ledna fanoušci robotického průzkumu Marsu netrpělivě čekali na potvrzení, že už je rover v kráteru Jezero znovu na cestě, se šesti jádrovými vzorky v zásobníku a 19. let helikoptéry proběhl bez závad. Ovšem ticho na oficiálních webech mise i sociálních sítích bylo mírně znepokojující. Nedostatek informací ukončil až tweet ze 7. ledna, kdy NASA oznamovala, že poslední odběr pevného vzorku, respektive jeho ukládání do mechanismu pro zpracování a uložení vzorků se nezdařil a začalo vyšetřování nastalé situace.
Rover Perseverance má ve svém řídicím SW poměrně pokročilé části kódu, které mu dovolují zatím nejvyšší stupeň autonomie a samostatného provádění úkolů ze všech dosavadních robotických průzkumníků Marsu. V porovnání s předchozími misemi roverů Curiosity, Spirit a Opportunity nepotřebuje tak často každý svůj krok „konzultovat“ s řídicím týmem na Zemi, posílat po každé dílčí operaci data a fotodokumentaci a čekat na další instrukce nebo povolení pokračovat v dalších krocích k dosažení cíle. Tato zvýšená autonomie se týká větší samostatnosti při jízdě v členitém terénu a také odběru vědeckých vzorků. Jeden den pozemní tým naplánuje a odešle povely, odkud a jakým nástrojem se má vzorek horniny odebrat a vše ostatní rover v dalším solu provede samostatně. Robotický průzkumník sám nabere vybraný nástroj do vrtacího zařízení, robotickou paží umístí hrot nástroje na přesně stanovené místo v prostoru a podle zadaných řezných podmínek odvrtá kamenný vzorek. Následně otočnou hlavici s vrtačkou přemístí před tělo roveru, kde je nafoceno čelo jádrového vrtáku s viditelnou plochou odebraného vzorku v odběrové trubičce. Poté vrták samostatně zasune do otvoru v otočném karuselu pro vrtací nástroje. Karusel si nástroj zachytí, otočí se o 180°, trubička se vzorkem je vyjmuta z vrtáku a probíhá její další zpracování uvnitř roveru jako je focení, odhad odebraného množství, hermetické uzavření a umístění druhou robotickou paží vespod roveru do volné pozice v zásobníku pro odebrané vzorky. Vše automaticky zdokumentováno a data odeslána na Zemi, kde si je technici i vědecký tým prohlédnou až následující sol.
Pokud by rover během celé operace narazil na problém, zastaví se, bezpečně ukončí všechny činnosti a obrazně řečeno zavolá domů: „Pasadeno, mám tady problém.“
A přesně to se také stalo během solu 306 (29.12.). V okamžiku, kdy se robotická ruka snažila zasunout vrták s odebraným vzorkem do připraveného otvoru v karuselu, narazila na zvýšený odpor cca 1 cm od místa, kde měl vrták dosednout na čelo příruby, aby byl v této poloze upnut a „předán“ z vrtačky do mechanismů v těle roveru. Rover na to zareagoval přesně podle plánu – zastavil veškerou činnost, odeslal informace o anomáli a vyčkával na nové instrukce.
Pozemní tým odeslal povely pro zaslání doplňkových dat a snímků, které by objasnily nastalou situaci. Na jejich kompletní doručení ale museli čekat několik dní, protože se Země a Mars nacházely ve špatné synchronizaci – zrovna nastalo období tzv. „omezených solů“, kdy je činnost roveru omezena kvůli většímu zpožďění v komunikaci se Zemí.
Z přijatých fotek a dat bylo zjištěno, že vzorek byl sice vyvrtán správně, ale materiál kamene v místě odběru nebyl dostatečně soudržný, tak jako u předchozího vzorku, odebraného jen několik cm od něj a uvnitř vrtáku se rozlámal na několik menších kusů. Zde můžeme připomenout, že typický jádrový vzorek z této mise má mít tvar válečku o průměru 13 mm a délce většinou 66 mm. Tvarem a velkostí ne nepodobný kousku školní křídy pro psaní na tabuli. Během navádění vrtáku do karuselu několik menších kusů vzorku z dutého vrtáku vypadlo a zůstalo ležet v nejhorším možném místě před dosedací plochou příruby a další 2 kousky dokonce mezi otočným talířem karuselu a pevným rámem roveru.
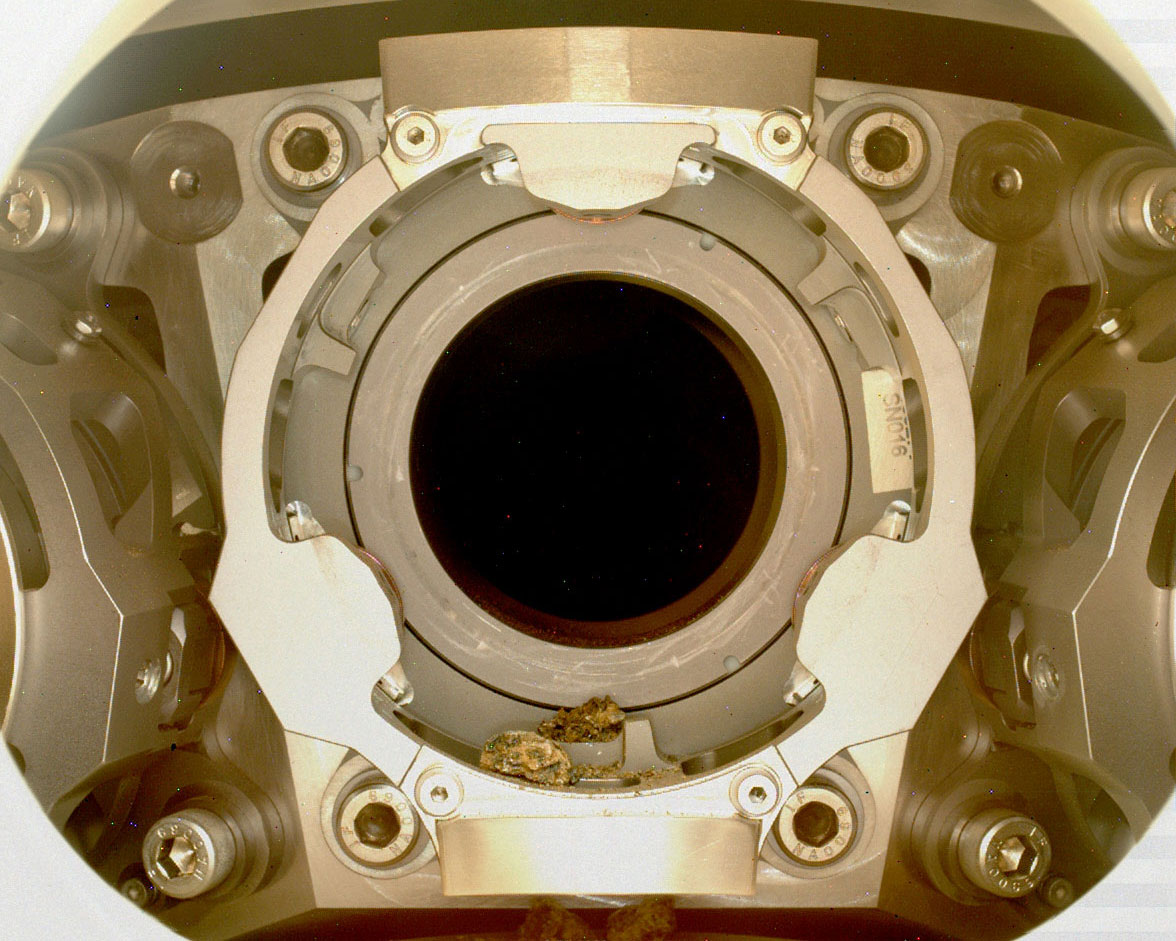
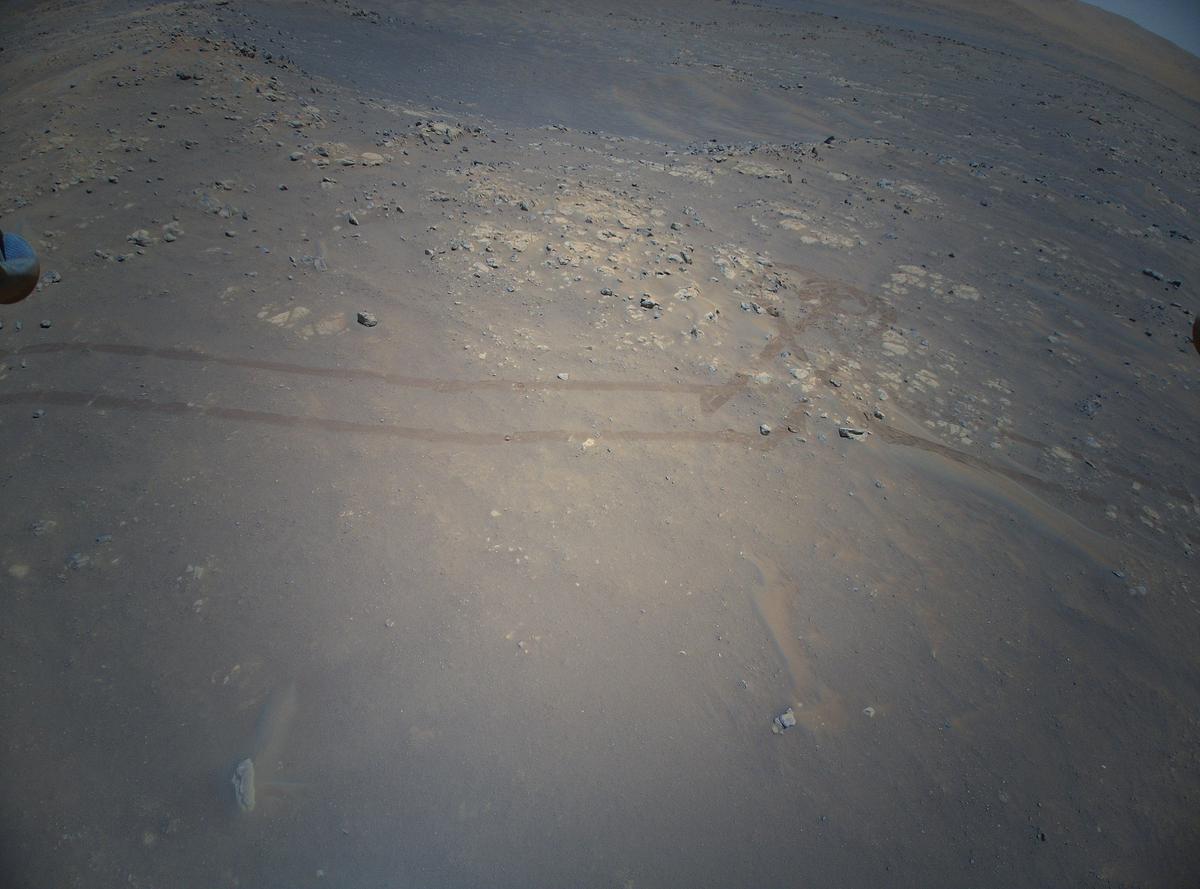
Následující dny se nesly v duchu navrhování a testování plánu, jak se překážejících kamínků zbavit. Vše bylo nejdříve nasimulováno a úspěšně vyzkoušeno na pozemním dvojčeti, roveru Optimism a od 12. ledna začala očistná akce na Marsu. Nejdříve se provedlo podrobné snímkování povrchu před a pod roverem, aby šlo později zkontrolovat, co při následných pohybech z roveru vypadlo. Dalším krokem bylo vysypání zbytku odvrtaného vzorku z odběrové trubičky č. 261 v jádrovém vrtáku zpět na povrch planety, což probíhalo postupně od 14. do 15.1. Byl to nekompaktní vzorek a jakákoli další manipulace s ním by mohla přinést jenom problémy.

Na 15. a 16. ledna byly odeslány povely provést dva testovací pokusy o otočení karuselu s vrtacími nástroji. Nejdřív jen malý pohyb, v druhém kroku větší. Tím se měl rover v ideálním případě zbavit všech rozdrolených kousků kamene před vstupním otvorem pro nástroje, ale zatím to bylo bráno pouze jako test. Následovala druhá série snímkování povrchu pod roverem a otvoru v karuselu, která měla zdokumentovat výsledek testu. Tyto snímky se dostaly na Zem až 18. ledna a naštěstí se jimi potvrdilo úpné odstranění nažádoucích kusů kamení, takže cesta pro přijetí vrtáku do karuselu byla volná.
Karusel se ale nezbavil dvou jiných úlomků mezi otočným talířem a rámem. Kvůli tomu Percy popojela 5 m ke kamenému výchozu, kde zaparkovala s bočním náklonem 13,2° na levou stranu. Tam provedla 2x kompletní otočení karuselu se současně zapnutým perkusním mechanismem vrtačky, aby navíc celý rover mírně vibroval. Po této operaci byl vrták úspěšně zasunut a upnut do volného otvoru v karuselu a lednová očistná operace tím byla úspěšně dokončena. Tým pozemních operátorů Perseverance si do svých manuálů připsal další kapitolu, jak řešit podobnou situaci při odběru vzorků, aby ji příště buď předešli, nebo pokud se zopakuje, tak aby ji zvládli vyřešit mnohem rychleji.
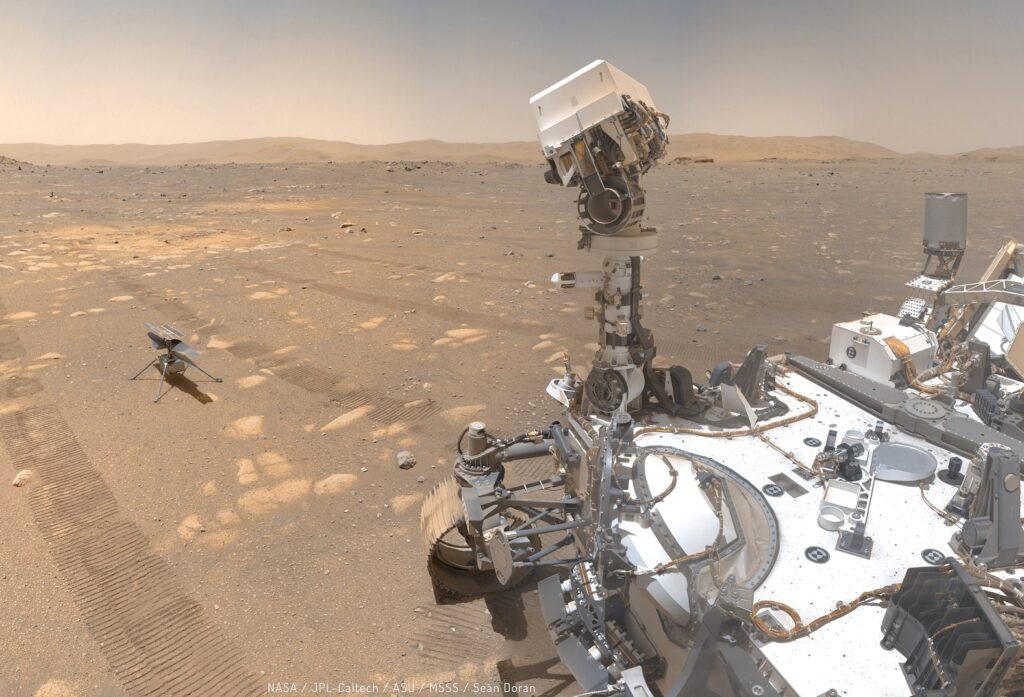
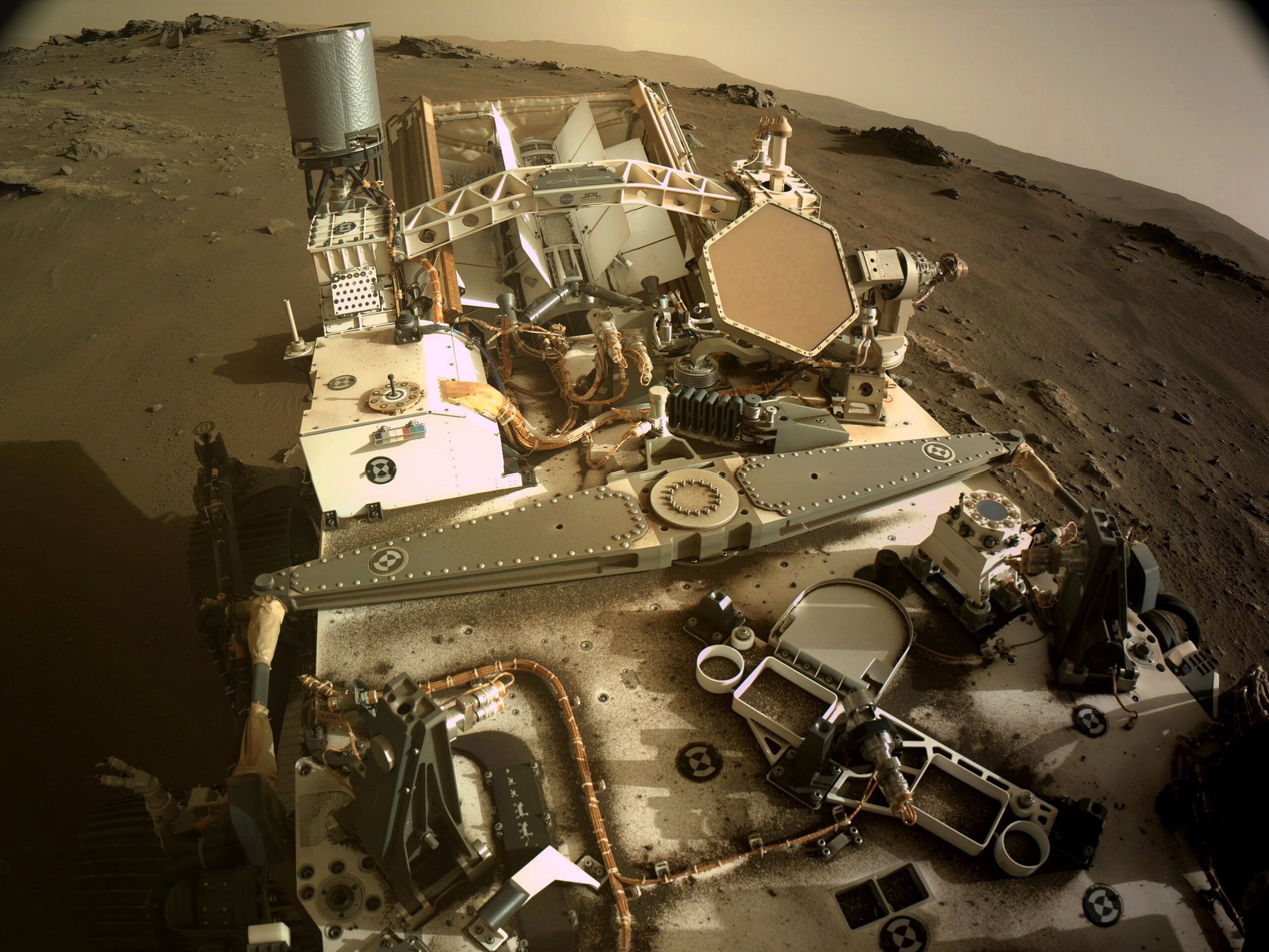
Během snímkování vysypaných zbytků kamene kamerou Watson ke konci ledna byly kamery NavCam zaměstnány kontrolním focením roveru a jeho nejbližšího okolí po skončené prachové bouři, z čehož vzešlo následující panorama, dokumentující stupeň pokrytí roveru prachem a pískem po 328 solech na povrchu Marsu.
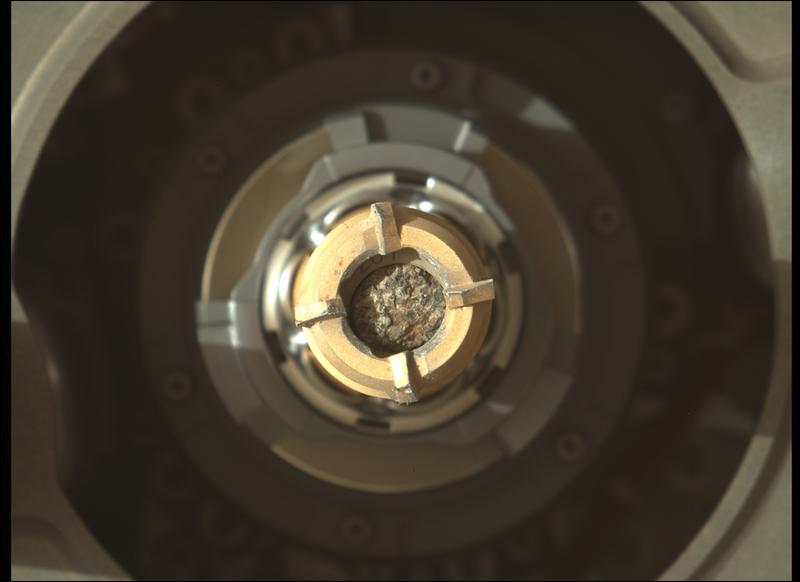
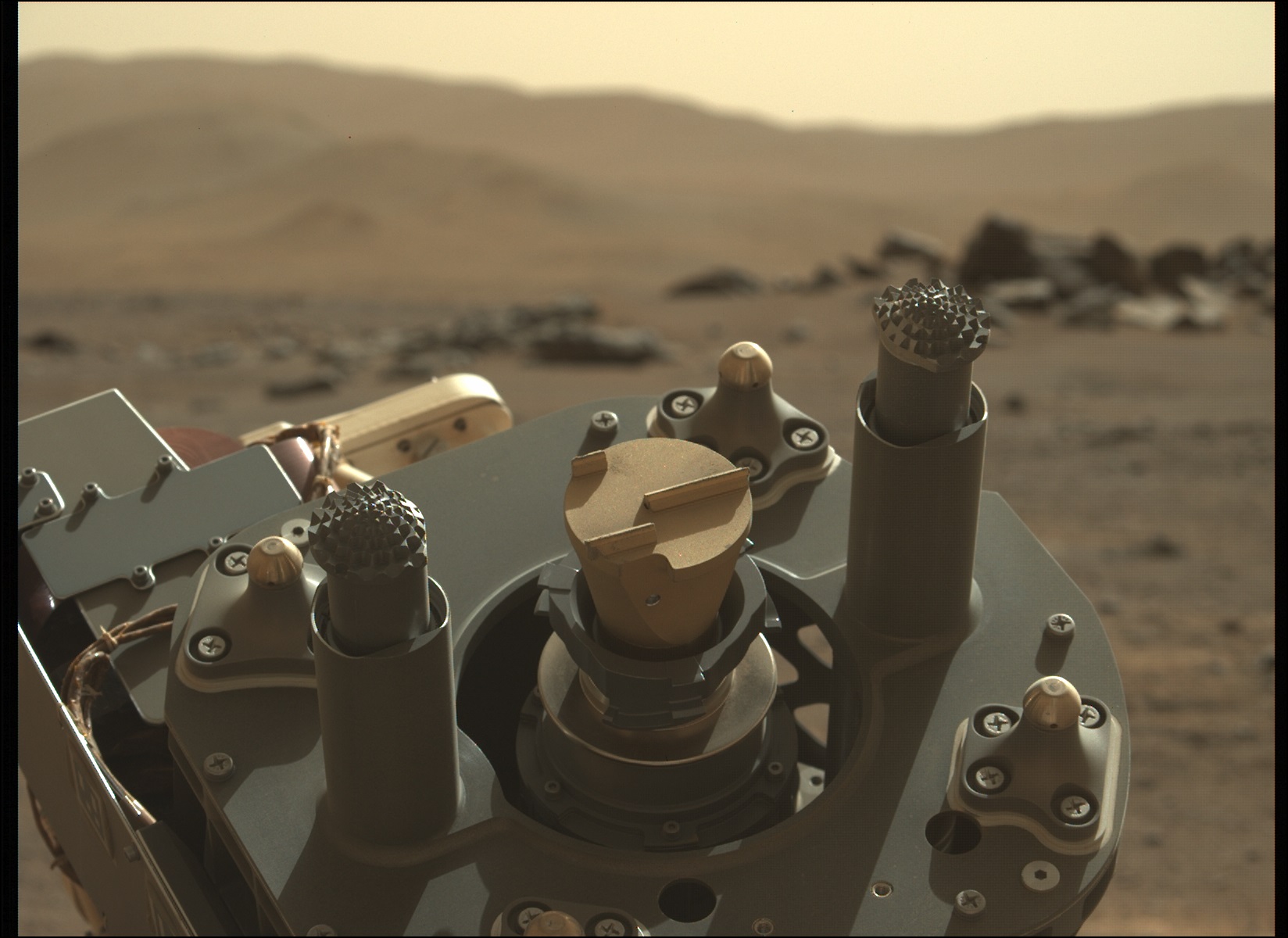
Závěr měsíce naštěstí všem znovu spravil chuť. Během solu 337 (31.1.) se perkusní vrtačka s jádrovým vrtákem potřetí opřela do kamene Issole a odebrala krásný celistvý kamenný vzorek, v pořadí šestý, který dostal název „Malay“. Na snímku je nejnovější vrt ten nejvíce vlevo nahoře, s čerstvou hromádkou odvrtaného prachu. Další 2 otvory pod ním jsou staršího data, u kterých je patrné, kolik prachu už vítr dokázal odvát.

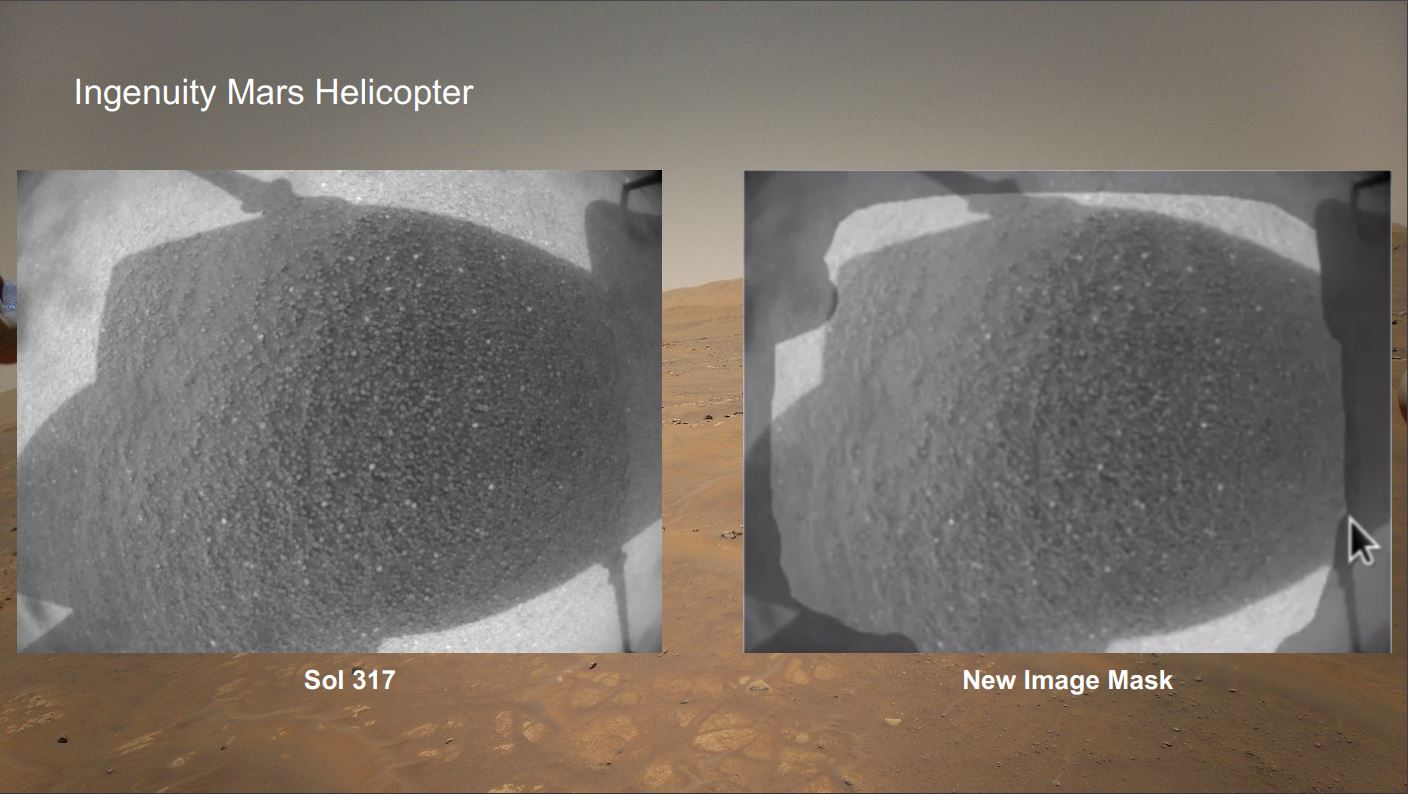
Ingenuity mezitím zůstávala celý první měsíc roku 2022 téměř stranou zájmu. Respektive, dokud nebyl vyřešen výše popsaný problém s odběrem vzorku, byl další pohyb roveru i vrtulníčku pozastaven. Navíc bylo létání Ingenuity, po dobu několika lednových solů, znemožněno také prachovou bouří, během které klesl atmosferický tlak o dalších 7% a sluneční svit, nutný pro výrobu energie, byl nižší o 20%. Za těchto meteo-podmínek by Ingenuity nemohla létat, ani kdyby byl rover v pořádku. V důsledku přechodu prachové bouře byly jemným prachem zaneseny jak pohyblivé části rotorové hlavy, zyšující odpor při jejich pohybu, tak také kryt objektivu navigační kamery na spodní straně krychlového těla vrtulníčku. S oběma problémy si musel pozemní tým před dalším letem nějak poradit a hned dodejme, že úspěšně.
Nánosy prachu kolem okrajů snímků z navigační kamery vadily jasnému výhledu na povrch a řídicí letový SW by tyto artefakty mohl v určitých situacích nesprávně vyhodnotit jako přibližující se terén a dělat chybné zásahy do řízení. Z toho důvodu byla nově na všechny snímky z navigační kamery, sloužící k orientaci a navigaci za letu, aplikována sw maska, která tyto partie stímků překrývá, aby je navigační sw ignoroval a při řízení letu s nimi nepracoval.
Znovu na cestě
Zatím se ale vraťme zpět k roveru. Po 52 solech, neplánovaně strávených u kamene Issole a více než 4 měsících strávených v nevelké oblasti vědeckého zájmu South Séítah, se Percy opět pustila do jízdy. A jaké! Hned během prvního solu na cestě JV směrem, což bylo solu 340 (3.2.), vytvořila nový rekord v délce pohybu robotického vozítka po Marsu za 1 sol a to výkonem 243,3 metrů. Překonala tím předchozí rekord 228,1 m roveru MER Opportnity z roku 2005. Jakoby to nestačilo, hned následující sol 341 Percy svůj vlastní rekord ještě o kousek překonala výkonem 245,76 metrů. To vše díky pokročilému autonomnímu SW, jenž umožňuje roveru zadávat cíl cesty ve složitém terénu, který na začátku jízdy ani nemusí být v zorném poli kamer. Dalším plusem při těchto rekordních jízdách byl fakt, že se rover phyboval terénem, kudy už jednou projížděl v opačném směru, takže okolí trasy bylo dobře zmapováno.
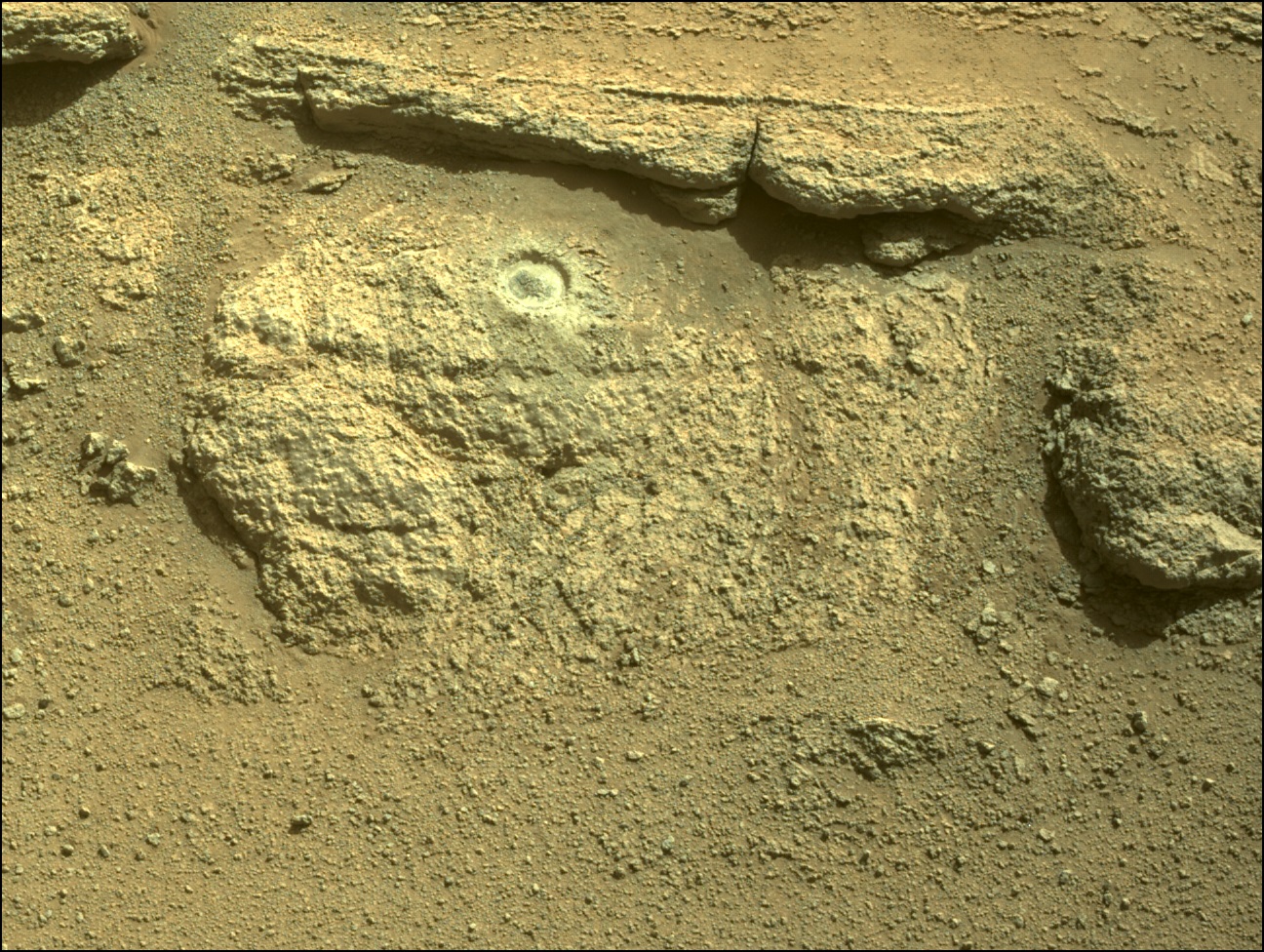
Několik kratších jízd v dalších solech dovedlo Percy k odhalenému skalnímu výchozu, pojmenovaném „Artuby“. Zde se pustily do práce kamery a vědecké přístroje, začínající zkoumat zajímavý hrbolatý kamenný povrch všemi možnými způsoby. Během solu 346 (9.2.) došlo i na odbroušení zvětralého povrchu do hloubky 5 mm speciálním abrazivním bitem pro snímkování podpovrchové struktury kamene.
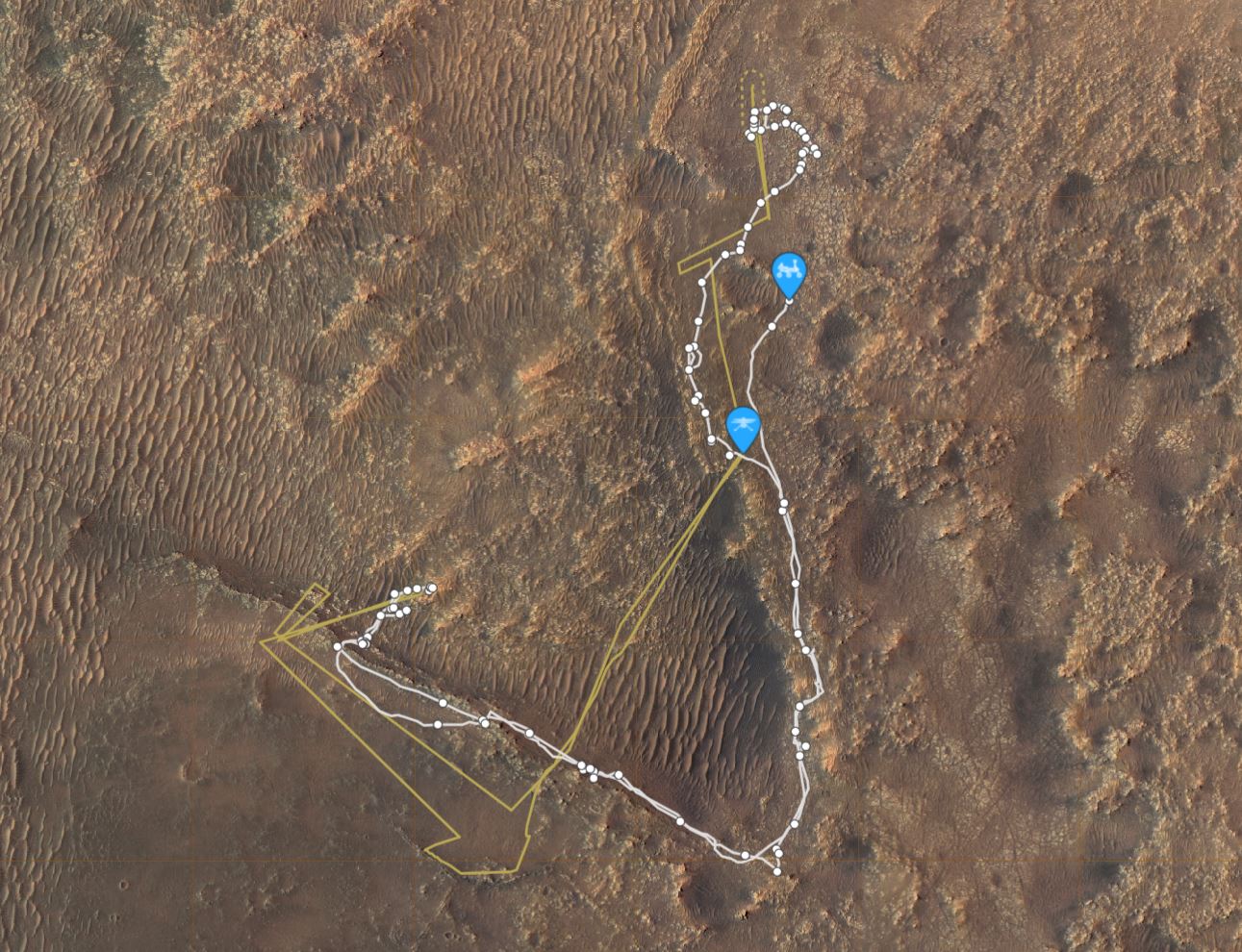
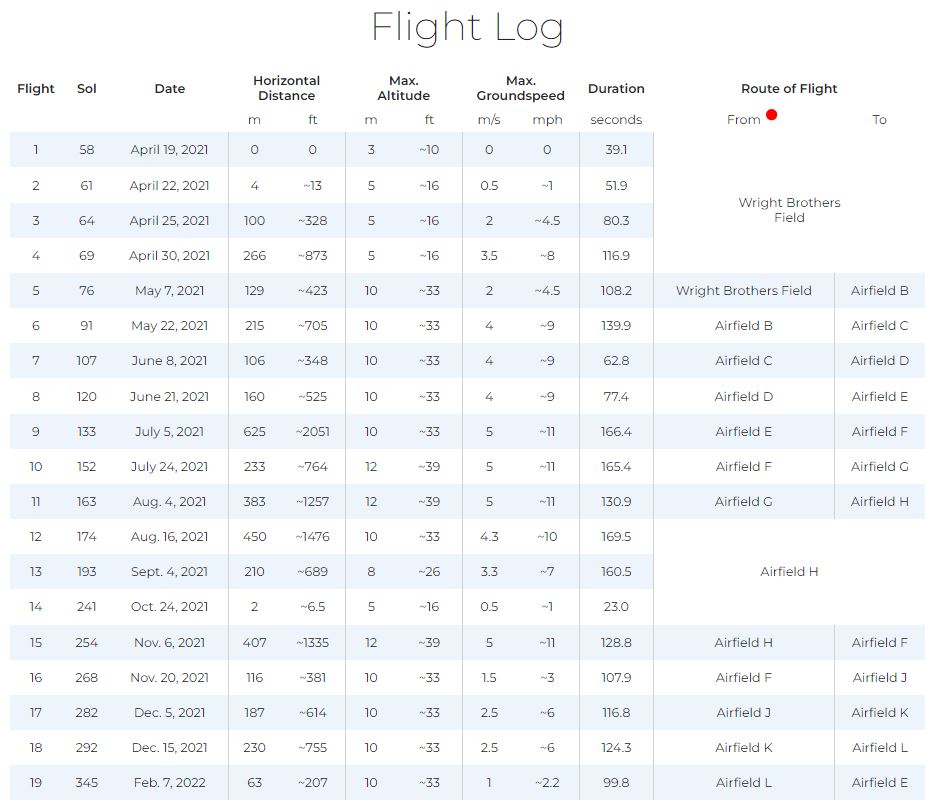
Mírně jsme ale předběhli sled událostí v čase. V předchozím solu 345 (8.2.) došlo konečně, s více jak měsíčním zpožděním, k 19. letu Ingenuity. Předcházela mu procedura čištění rotorových hlav od prachu, ovšem samotný let proběhl klidně a úspěšně, podle plánu z přelomu roku, trval necelých 100 sekund a měřil kolem 62 metrů. Konzervativní rychlostí 1 m/s, ve výšce max 10 m, se vrtulníček přesunul na „Letiště E“. Ingenuity tím dokončila zpětný přelet oblasti Séítah, který byl tentokrát rozložen do 3 dílčích letů kvůli menší přistávací oblasti a řidší atmosféře, vyžadující vyšší otáčky rotoru a tím i vyšší spotřebu energie. V opačném směru Ingenuity zvládla celou trasu 625 m na 1 zátah během letu č.9 (sol 133).
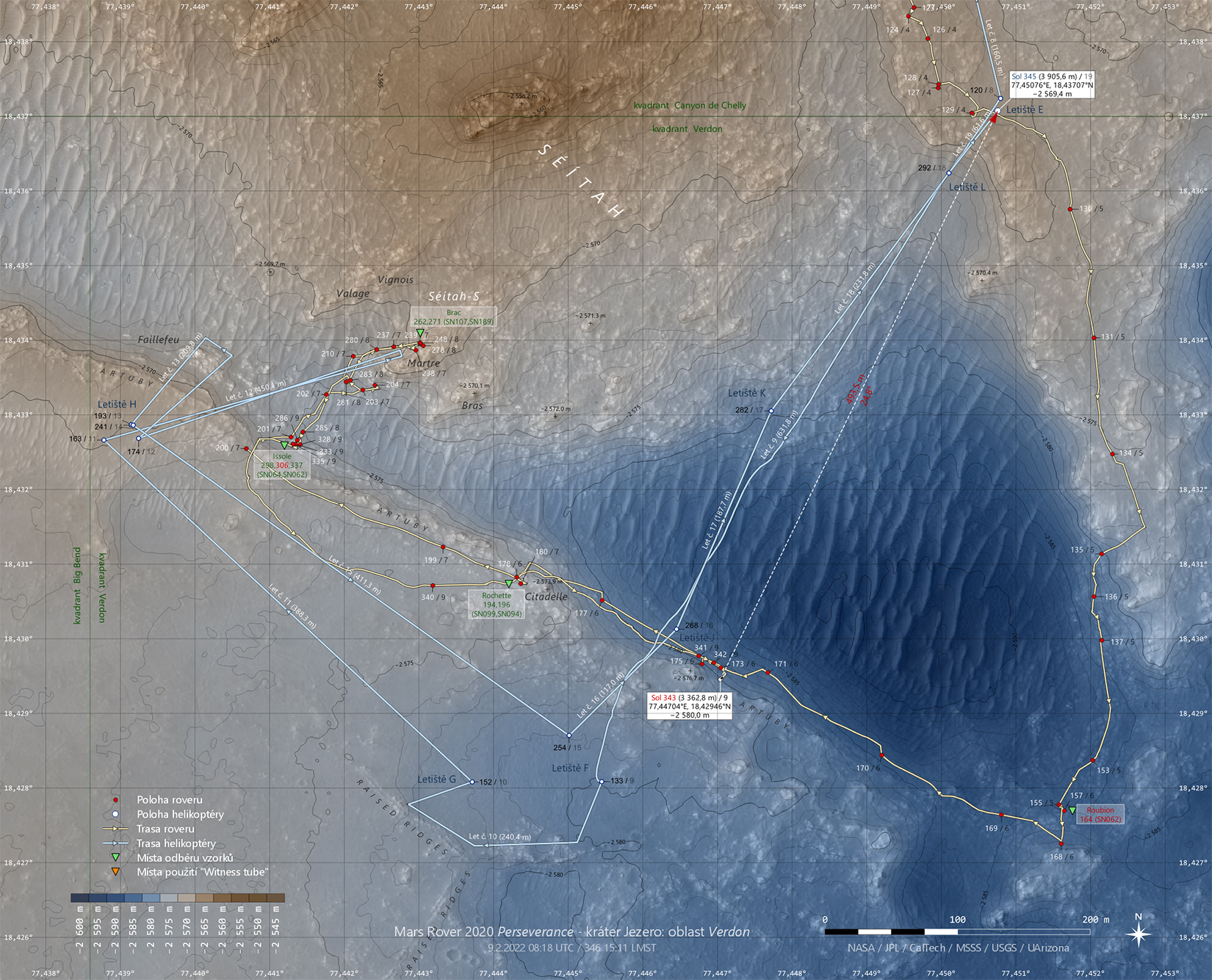
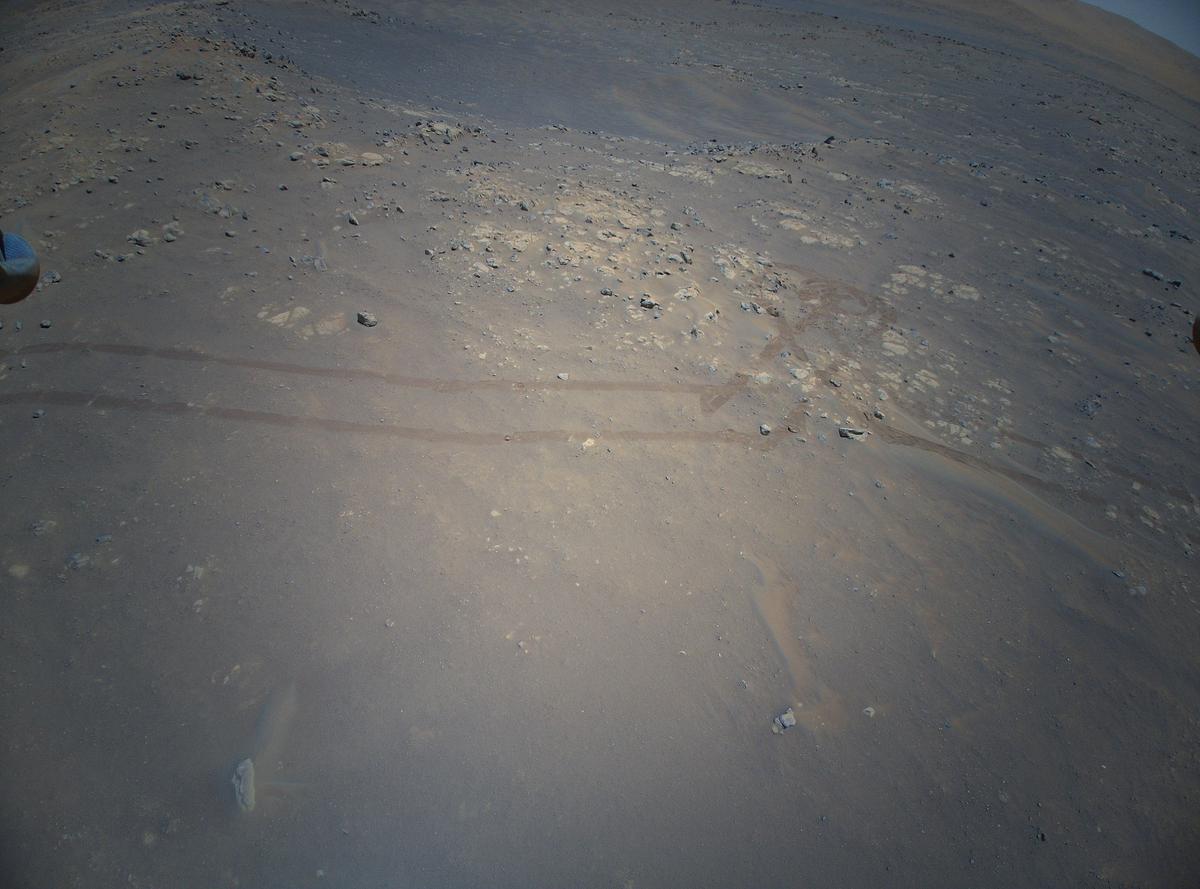
Rover solem 350 pokračoval v jízdě na jih, během solu 351 objel jižní cíp dunového pole Séítah a zamířil severním směrem. Během tohoto solu zřejmě ustanovil nový rekord v délce jízdy 320 m, což ale zatím nebylo oficiálně potvrzeno. V tomto postupu pokračoval prakticky každý následující sol a na svůj odometr si připsal několik dalších jízd s délkou >200 m. Během solu 355 bez zastavení projel kolem Ingenuity, vyčkávající v místě 19. přistání a pokačoval dále na sever. Zatím poslední jízda během solu 359 (23.2.) dostala Perseverance přibližně 200 m od místa jejího přistání před rokem, v oblasti Máaz, kde se plánuje provedení dalšího odběru jádrového vzorku.
Souhrn výkonů a událostí za 1. rok mise
Dne 18.2.2022 ve 21:55 CET uběhlo přesně 365 pozemských dní (355 solů) od přistání roveru v kráteru Jezero. Událost vhodná k menšímu bilancování a souhrnu toho, co se za předchozích 12 měsíců podařilo, nebo naopak kde nastaly komplikace a jaké jsou plány mise pro další období.
Rover Perseverance :
- Velmi přesné a bezpečné řízené přistání zatím nejtěžší pohyblivé sondy Marsu jen 1,7 km od středu přistávací elipsy 7,7 x 6,6 km, a to díky dvěma inovativním EDL technikám Range Trigger a Terrain-Relative Navigation
- Všechny přístroje byly úspěšně aktivovány a kromě větrného čidla meteo-soupravy MEDA pracují velmi úspěšně
- Přístroj MOXIE během 8 pracovních cyklů z místní atmosféry vyrobil >50g velmi čistého kyslíku O2
- Vrtná souprava dokázala odebrat 6 kvalitních jádrových vzorků ze 3 lokalit (Rochette, Brac, Issole). Spotřebováno je celkem 8 pouzder na vzorky (1x kontrolní vzorek, 1x atmosféra, 6x kamenné vzorky)
- Došlo 2x k neúspěšnému odběru pevného vzorku (Roubion, Issole 2)
- Na dně kráteru byly překvapivě místo usazenin zjištěny téměř výhradně vyvřelé horniny a to v obou zkoumaných oblastech Máaz i Séítah.
- Ve zkoumaných horninách byly detekovány organické molekuly. Zatím není jasné, jestli mají biologický původ. To bude možné určit až na základě jejich podrobného zkoumání na Zemi.
- Prozatím zkoumané minerály ze dna kráteru jsou geologům velmi známé: například pyroxen, olivín, živec, sulfátové a perchlorátové soli a pod.
- Rover v 1. roce ujel cca 3,5 km (ke dni psaní tohoto článku (sol 360) to bylo 4,16 km)
- Bylo shromážděno 96+ GB dat, včetně více jak 100 tisíc snímků, byla pořízena 2 selfí roveru
Vrtulník Ingenuity:
- Sol 43 – úspěšně vysazen z mateřského roveru na povrch Marsu
- Sol 58 – úspěšně proveden první řízený atmosferický let vrtulového stroje na jiné planetě (do výšky 3 m) a odeslána všechna letová data včetně snímků. Tím byly splněny 3 základné cíle demonstrátoru – let v simulovaných podmínkách v pozemní laboratoři, let v reálných podmínkách na Marsu, přijetí letových dat z letu na Marsu.
- Sol 75 – úspěšně dokončen 5. let – zcela splněna primární mise vrtulníčku. Po 3. letu přešla technologicko-demonstrační mise na operačně-demonstrační misi.
- Bylo potvrzeno, že celá mechanická, aerodynamická i elektronická konstrukce vrtulníku je plně funkční a ovladatelná a to včetně použitých komerčně dostupných elektronických součástek a baterií.
- Sol 133 – proveden 10. let na rekordní vzdálenost 625 m (doba letu 166 s)
- Sol 174 – proveden 12. let o rekordní době letu 169,5 s (délka letu 450 m)
- Sol 345 – proveden zatím poslední 19. let (délka 62 m)
- Zatím byla celkově uletěna vzdálenost ~3,9 km, v souhrnné době letu 2070 s (34,5 min)
- Byla dosažena max rychlost letu 5 m/s, max výška letu 12 m nad terénem
- Vrtulník byl schopen letového provozu i za sníženého atmosferického tlaku, kdy byly otáčky nosného rotoru zvýšeny z 2537 na 2700 ot/min.
- Vrtulníček přestál prachovou bouři během solů 310-314, načež byl nadále schopen letového provozu
- Po 18. letu bylo na Zemi přijato celkem 2532 č-b snímků z navigační kamery a 127 hi-res barevných snímků z přehledové kamery
- Byly úspěšně provedeny 2 aktualizace letového SW, odstraňující anomálie při předletové kontrole nosného rotoru
- Lety Ingenuity jsou prováděny pro vědecký průzkum okolí a plánovací průzkum pro jízdu roveru
- Ověření schopností Ingenuity potvrdilo správnost metod při konstruování a testování extraterestrických létajících prostředků v pozemských podmínkách, což bude uplatněno v následných projektech Dragonfly a možná Mars Science Helicopter.
Plán aktivit Perceverance a Ingenuity v 2. roce mise:
- Návrat roveru k místu svého přistání v oblasti Máaz
- Odběr dalších 2 vzorků hornin v této oblasti na začátku března
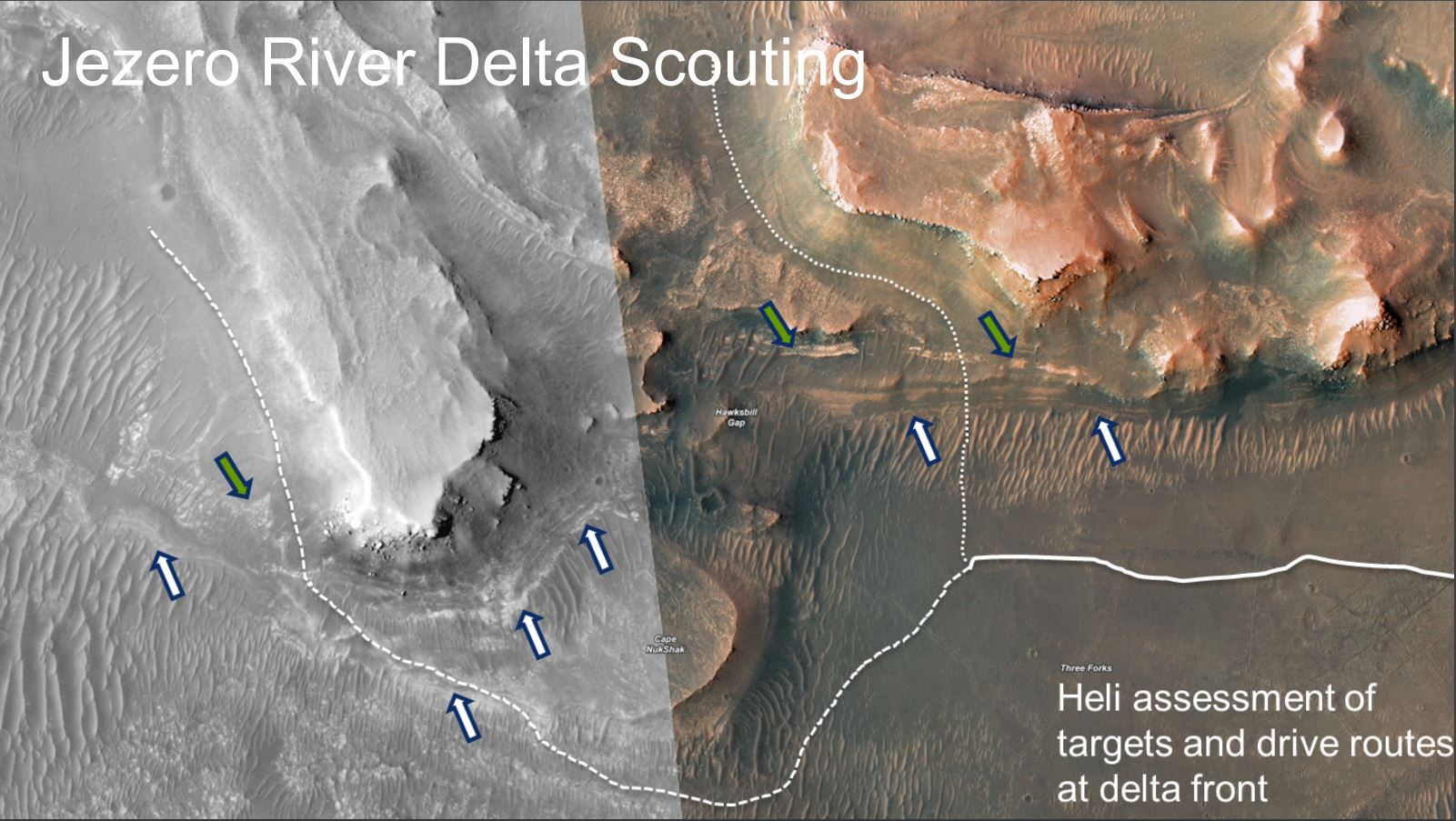
- Přejezd k říční deltě severní cestou
- U paty delty strávit přibližně 1 rok zkoumáním usazenin
- Rover provede další aktualizaci SW pro ještě větší autonomii při pohybu a plnění vědeckých úkolů. Rover bude schopen samostatně monitorovat a řídit svou spotřebu energie a autonomně rozhodovat o jejím využití ke konci každého solu.
- Ingenuity obdrží nový upgrade letového SW pro zvýšení navigačních schopností, focení, a celkově vyšší autonomii
- Ingenuity bude podnikat dlouhé průzkumné lety kolem úpatí delty jako předvoj vědecké kampaně roveru
- Vysoce výkonný palubní počítač Ingenuity bude více využíván pro analýzu dat a jejich kompresi
Zdroje informací:
https://mars.nasa.gov/
https://mars.nasa.gov/
https://www.youtube.com/
https://twitter.com/
https://mepag.jpl.nasa.gov/
https://mepag.jpl.nasa.gov/
https://www.kosmo.cz/
Zdroje obrázků:
https://twitter.com/65dbNoise/status/1473974098627809287/photo/2
https://twitter.com/65dbNoise/status/1473974098627809287/photo/1
https://mars.nasa.gov/…N0090001HELI00000_000085J02_1200.jpg
https://twitter.com/PaulHammond51/status/1484847285674835971/photo/1
https://space.winsoft.cz/public/images/Perseverance/MR2020-trace-345.jpg
https://mars.nasa.gov/technology/helicopter/#Flight-Log
https://www.kosmo.cz/…FPerseverance%2FMR2020-trace-345.jpg




{kind=link}
{kind=link}
{kind=link}
Děkuji moc za tradičně skvělý přehled – pořád čekám, kdy NASA najme nějakého Čecha, aby jim to překládal do angličtiny pro jejich stránky, protože sami nic tak dobrého na jednom místě nemají, aspoň co vím 🙂
Z hlediska „příběhu“ je neuvěřitelné, kolikatýdenní zdržení dokáží vyrobit obyčejné drobky. Myslím, že to je jedno z velikých ponaučení pro NASA a zúčastněné firmy, sami to dokonce někde před pár měsíci přiznávali, jen to bohužel nejsem schopný teď rychle dohledat: že nikdo neměl dopředu tušení, kolik z těch hornin bude takhle nesoudržných a sypkých. Navíc, když to vypadá, že zrovna ty sypké by mohly být velmi zajímavé svým složením (usazeniny).
Jsem moc rád, že se vám článek líbil.
Máte pravdu v tom, že NASA/JPL prakticky při každé povrchové misi na Marsu něco nového překvapí, s čím konstrukce sondy původně nepočítala. Naštěstí to v posledních 20 letech nebývají fatálních selhání, která by znamenala ztrátu celé sondy během primární mise. Na Zemi naštěstí existují týmy velmi talentovaných a věci oddaných techniků, kteří si i s těmito situacemi většinou dokáží velmi dobře poradit a zanedlouho sonda pracuje dál.
Důležité je, že se další planetární sondy nepřestávají stavět a posílat k cizím světům. Každá z nich je o něco lepší a dokonalejší než její předchůdkyně, protože staví na zkušenostech z předchozích misí.
Skvělý podrobný článek! Děkuji
Díky za vaši pozitivní zpětnou vazbu. Je to motor, co nás žene do psaní dalších dílů. 🙂
Dobrý den, moc děkuji za další z vašich skvělých článků.
Rádo se stalo. O této misi je radost psát všechny novinky.
Díky za super článek ! Tahle mise je v kosmonautice jedna z nejvíce atraktivních, takže si o ní vždy velmi rád přečtu, stejně jako asi řada dalších. Jen tak dál ! Kdysi jsem četl knihu o misi Viking, nicméně mise roverů by byly určitě ještě výrazně zajímavější. 🙂
Emily Lakdawalla, planetární vědkyně a blogerka The Planetary Society, napsala dvě úžasné knihy o misi roveru Curiosity. První je velmi detailní popis roveru, vše o jeho konstrukci, provozu, o jeho přístrojích.
https://www.amazon.com/Design-Engineering-Curiosity-Performs-Springer/dp/3319681443
Druhá kniha rozebírá misi z pohledu vědy, objevů, výkonů, mapy, trasy, geologie, atd. Nevím, jestli už vyšla.
Tu první knížku mám doma a rozhodně stojí za to. 🙂
Děkujeme za informaci, super !