O umělé inteligenci je v poslední době slyšet ze všech stran. Tato metoda však také pomáhá vědcům identifikovat minerály v kamenech, které studuje vozítko Perseverance. Mnozí vědci sní o průzkumu planet pomocí chytrých sond, které by přesně věděly, jaká data hledají, kde je najít a jak je analyzovat. Ačkoliv realizace takových snů chvilku potrvá, pokroky pozorované u roveru Perseverance představují nadějné kroky tímto směrem. Již téměř tři roky se na vozítku testuje umělá inteligence, která v kamenech na Marsu vyhledává minerály. Je to první využití AI na rudé planetě k provádění autonomních rozhodnutí založených na analýze složení kamenů v reálném čase.
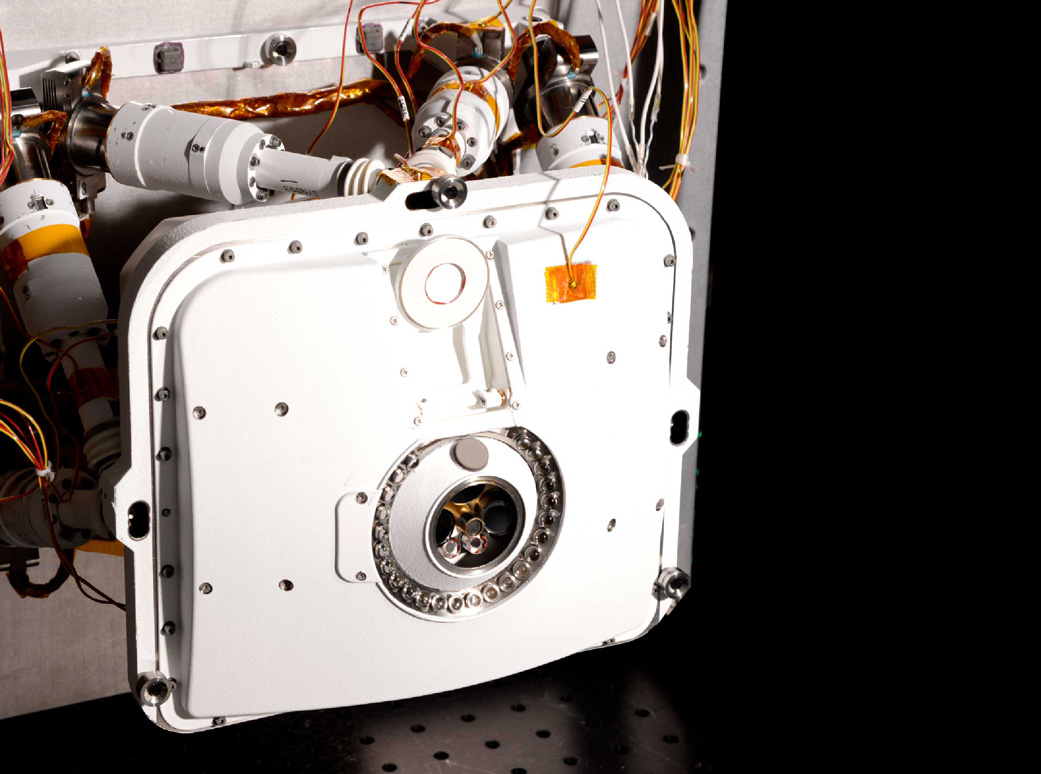
Zmíněný software je spojen s provozem spektrometru PIXL (Planetary Instrument for X-ray Lithochemistry), který vyvinuli na Jet Propulsion Laboratory. Mapováním chemického složení minerálů na povrchu kamene PIXL umožní vědcům určit, zda se kámen kdysi dávno zformoval v podmínkách, které by podporovaly mikrobiální život. Takzvané „adaptivní vzorkování“ funguje tak, že software autonomně umístí přístroj PIXL do blízkosti analyzovaného cíle a poté se podívá na snímky cíle pořízení přístrojem, aby v nich našel minerály, které stojí za hlubší prozkoumání. Vše probíhá v reálném čase, aniž by rover musel komunikovat s řídicím střediskem na Zemi!
„Pomocí umělé inteligence na přístroji PIXL se zaměřujeme na klíčové vědecké poznatky,“ říká Abigail Allwood z JPL a dodává: „Bez ní bychom v datech viděli jen náznaky něčeho zajímavého. Poté by bylo potřeba znovu naskenovat kámen, abychom jej více prostudovali. AI umožňuje přístroji PIXL dosáhnout výsledku aniž by lidé analyzovali data.“ Údaje z přístrojů vozítka Perseverance (PIXL nevyjímaje) pomáhají vědcům rozhodnout, kde provést jádrové vrty, jejichž odebraný materiál bude uložen do titanových pouzder, aby mohl být jednou (společně s dalšími vědecky mimořádně důležitými vzorky) dopraven na Zemi k podrobnější analýze v rámci programu Mars Sample Return.
Zdroj: https://www.nasa.gov/
Adaptivní vzorkování však není jediným uplatněním AI na Marsu. Zhruba 3 700 kilometrů od Perseverance se nachází vozítko Curiosity, které před lety vyšlapalo cestičku k využívání AI. Umělá inteligence tehdy umožnila autonomně střílet na kameny v okolí laserem podle jejich tvaru a barvy. Analýzou plynu, které se po zásahu laserem uvolnily, bylo možné určit chemické složení zasaženého kamene. Perseverance disponuje podobnou schopností, ale kromě toho má i pokročilejší formu AI, která umožňuje navigaci v terénu bez specifických příkazů ze Země. Oba rovery však stále spoléhají na desítky inženýrů a vědců, kteří na každý den plánují stovky individuálních pokynů. Technologické vychytávky ale oběma vozítkům umožňují udělat více vědy za kratší čas. „Hlavní myšlenka za adaptivním vzorkováním přístrojem PIXL je pomoci vědcům najít jehlu v kupce sena, či spíše dat. Uvolní se jim tak čas a energie, které mohou zaměřit na jiné věci,“ vysvětluje Peter Lawson, který vedl implementaci adaptivního vzorkování než opustil JPL a odešel do penze a dodává: „Ve výsledku nám to pomáhá získat rychleji tu nejlepší vědu.“
Zdroj: https://upload.wikimedia.org/
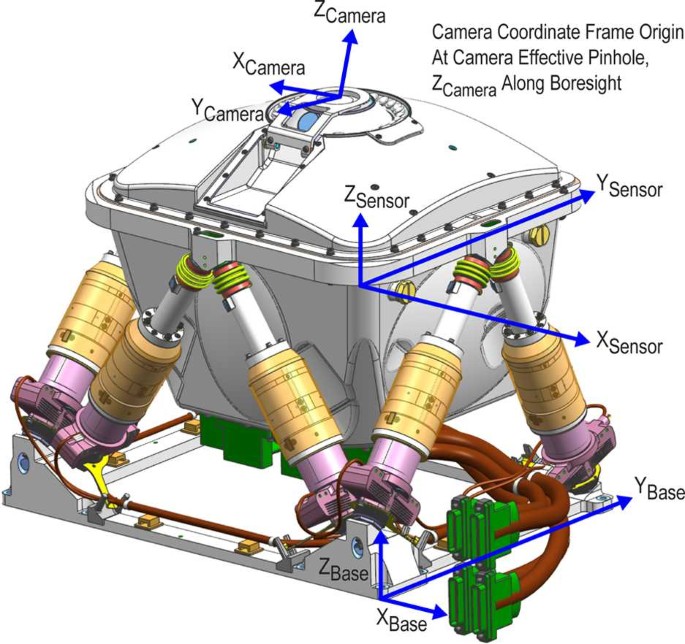
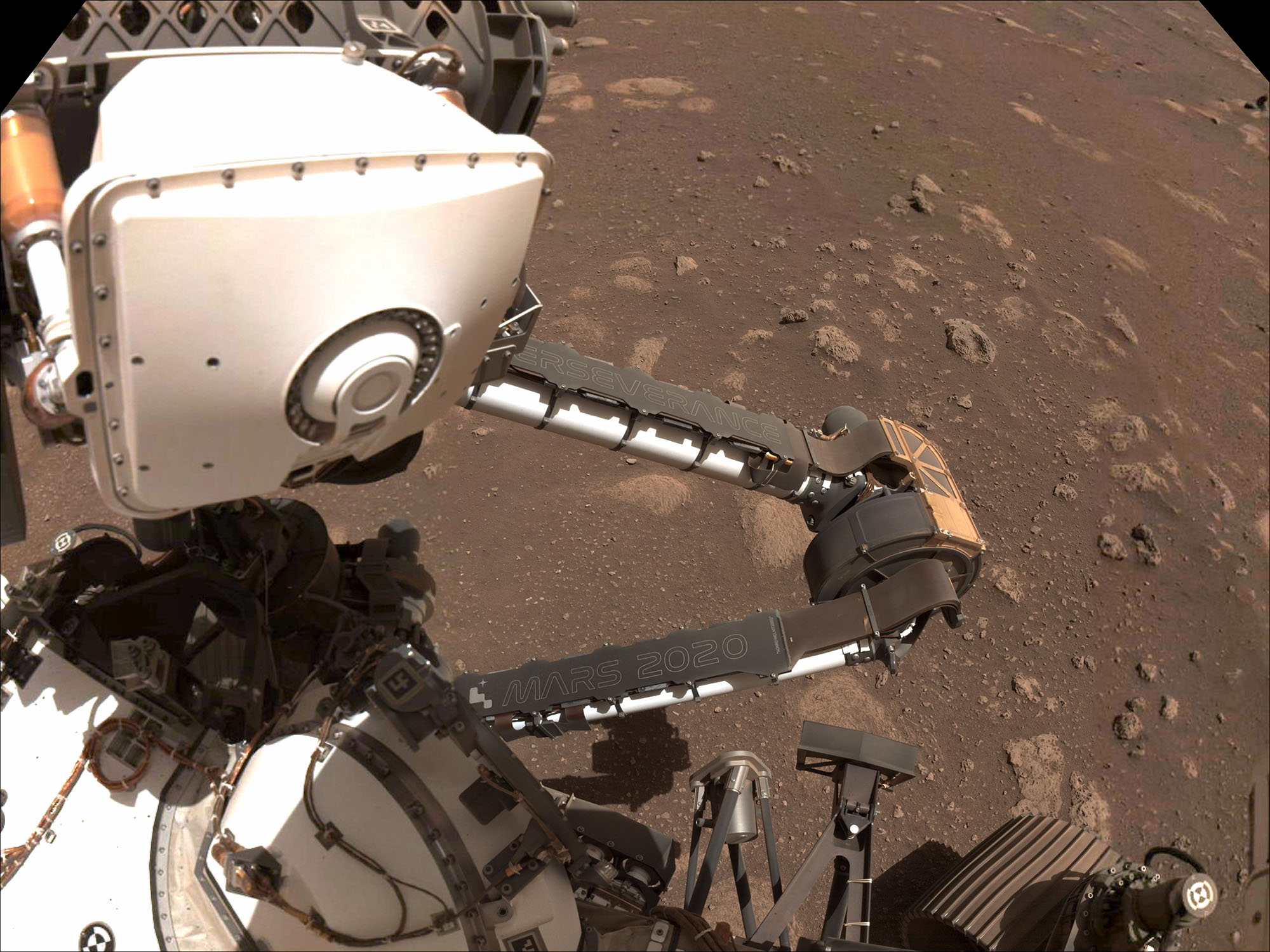
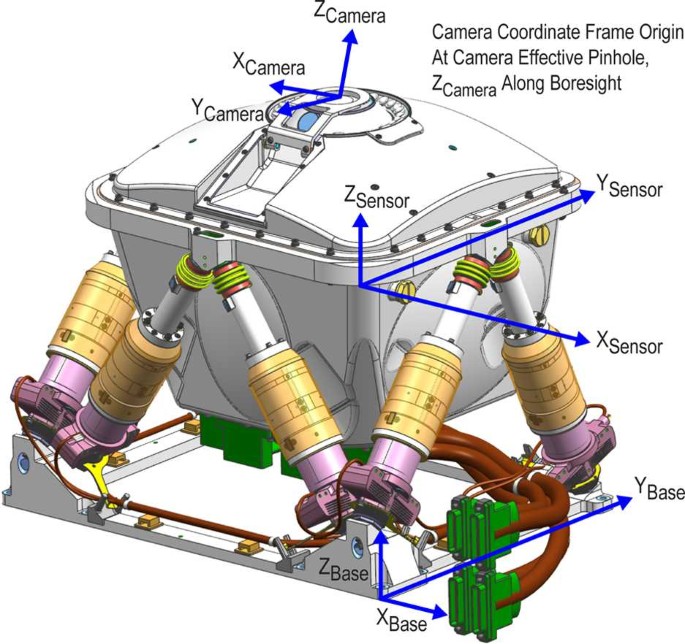
AI pomáhá přístroji PIXL hned dvěma způsoby. Nejprve se postará o umístění přístroje do ideální pozice, jakmile se dostane do blízkosti skenovaného cíle. Tento spektrometr se nachází na konci robotické paže roveru Perseverance a sám je ještě se zbytkem paže spojen šesticí malých robotických nožiček, která se souhrnně označují jako hexapod. Kamera přístroje PIXL opakovaně kontroluje vzdálenost mezi přístrojem a sledovaným kamenem a tato data pomáhají s jeho správným zarovnáním. Výkyvy teplot na Marsu jsou dost velké na to, aby se rameno roveru tepelnou roztažností zkrátilo či roztáhlo o malý kousek, který už stačí na pokažení přesného zaměření. Hexapod proto automaticky přizpůsobuje pozici přístroje, aby se dostal k cíli mimořádně blízko, ale přitom se jej nedotkl. „Musíme dělat úpravy v řádu mikrometrů, abychom dosáhli požadované přesnosti,“ vysvětluje Allwood a dodává: „Dostane se k cíli tak blízko, až se inženýrům ježí chlupy na zátylku.“
Zdroj: https://www.nasa.gov/
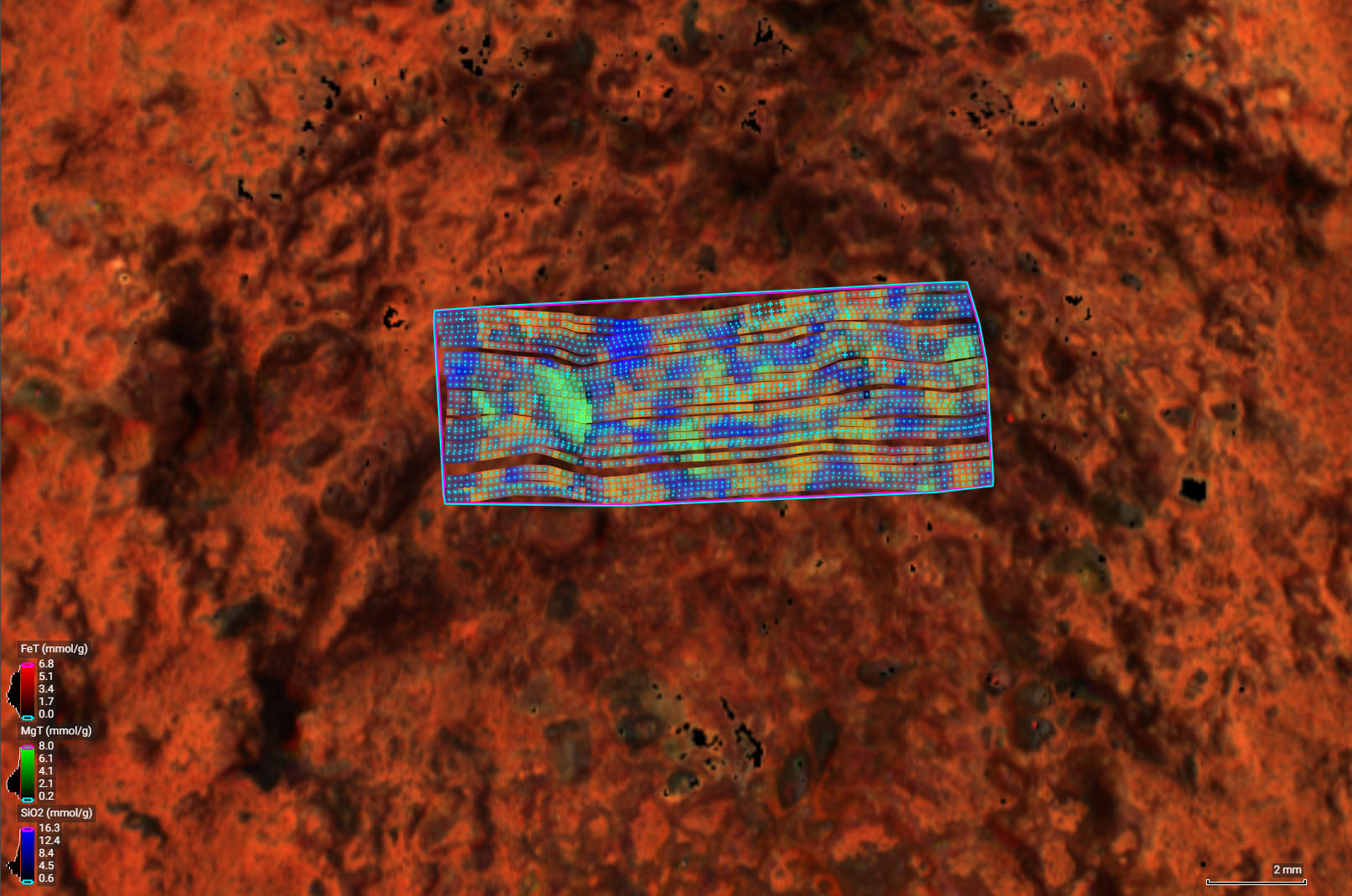
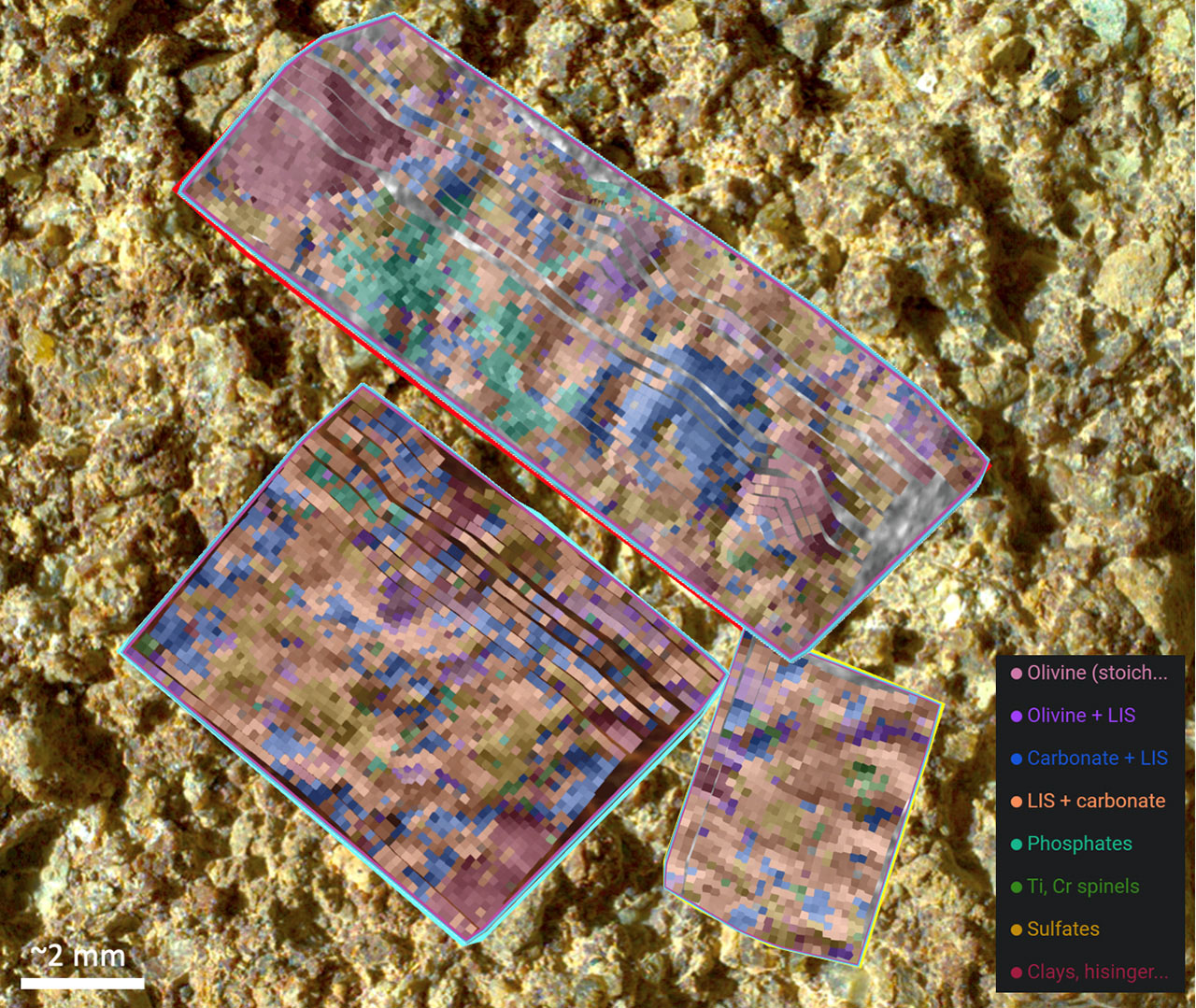
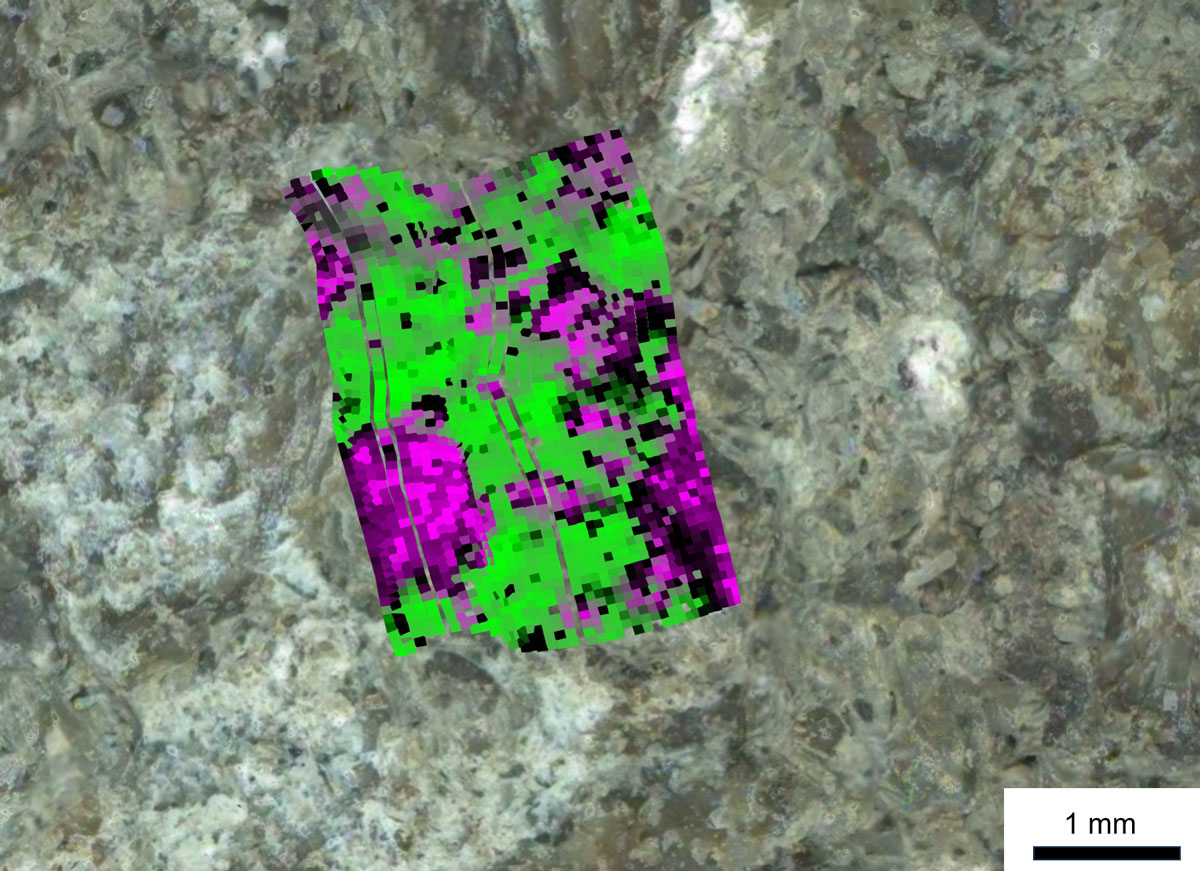
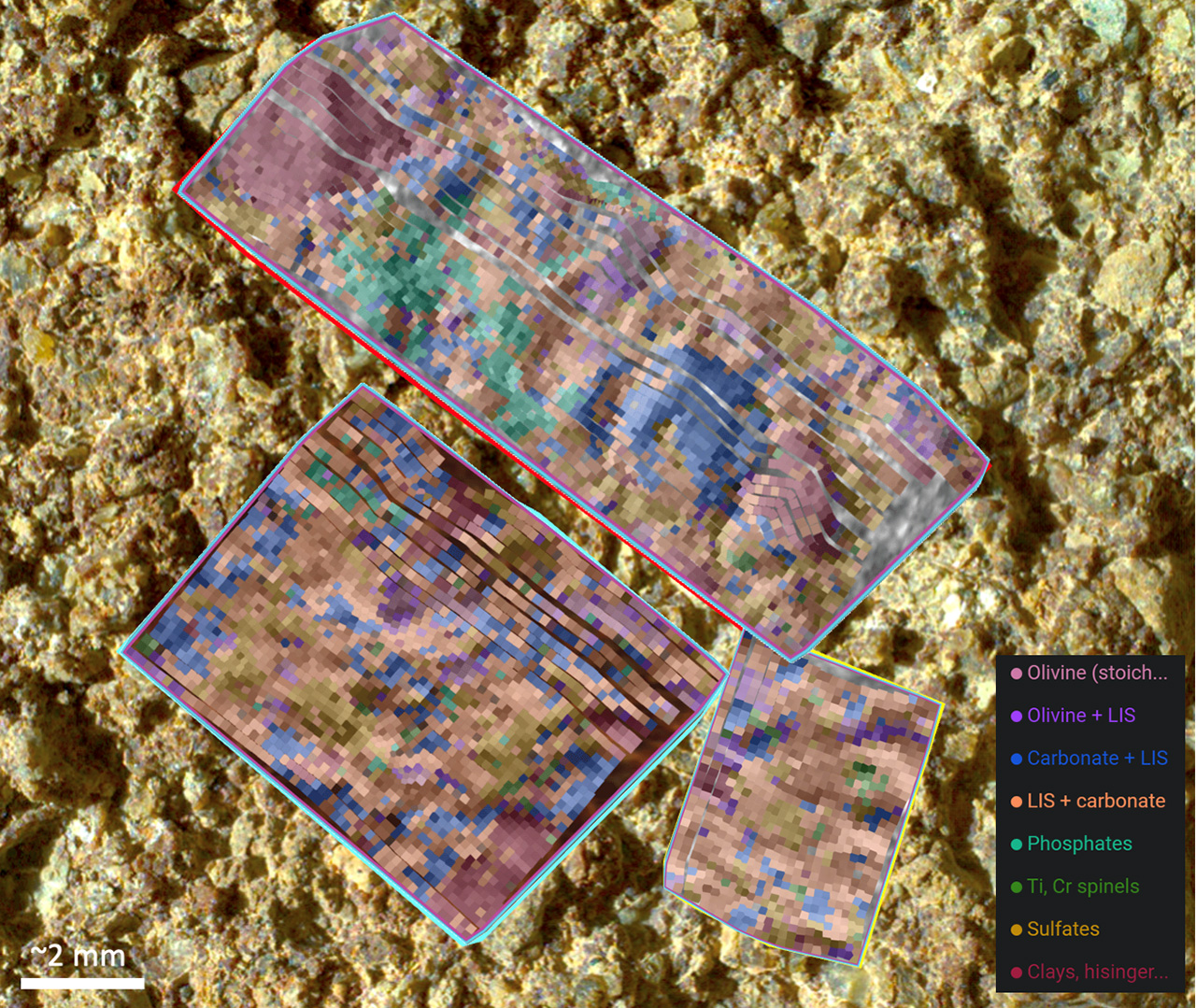
Jakmile se PIXL dostane do správné pozice, přichází na scénu další AI. Přístroj PIXL skenuje část kamene o velikosti poštovní známky tak, že vysílá k cíli tisíce svazků rentgenových paprsků, čímž vytváří mřížku mikroskopických teček. Každá tečka odhaluje informace o chemickém složení minerálů přítomných v daném místě. Právě minerály jsou nezbytné k nalezení odpovědí na klíčové otázky o Marsu. V závislosti na konkrétních kamenech mohou vědci pátrat po uhličitanech, které skrývají náznaky, kolik vody mohlo kameny formovat, ale mohou pátrat i po fosforečnanech, které zase mohou poskytovat živiny pro mikroorganismy, pokud někdy nějaké na Marsu byly.
Zdroj: https://mars.nasa.gov/
Není možné, aby vědci dopředu věděli, který ze spousty rentgenových paprsků zasáhne konkrétní minerál. Když se však podaří dané sloučeniny objevit, je přístroj schopen se zastavit, aby mohl sbírat další data, přičemž tato akce se nazývá long dwell, což je možné přeložit jako dlouhé setrvání. S tím, jak se systém díky strojovému učení stále zlepšuje, tak se postupně zvětšuje i seznam minerálů, na které se PIXL může v rámci dlouhého setrvání zaměřit. „PIXL je něco jako švýcarský nůž, který můžete nakonfigurovat podle toho, co vědci v danou chvíli zrovna hledají,“ říká David Thompson z JPL, který pomáhal vyvíjet software a dodává: „Mars je skvělé místo k testování naší AI, protože zde máme pravidelnou každodenní komunikaci, což nám dává možnost ladit vše za chodu.“ Až se jednou nějaké budoucí mise vydají do hlubších končin Sluneční soustavy, budou mimo kontakt po delší dobu, než je tomu u misí k Marsu. Právě proto se inženýři snaží vyvinout technologie pro vyšší autonomii misí, které provádějí vědu ve prospěch lidstva.
Zdroj: https://mars.nasa.gov/
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://media.springernature.com/…/MediaObjects/11214_2020_767_Fig15_HTML.jpg
https://www.nasa.gov/wp-content/uploads/2024/07/e1-pia24467.jpg
https://upload.wikimedia.org/…PIXL-OpenDustCover-20200922.jpg
https://www.nasa.gov/…pixl-instrument-examines-thunderbolt-peak.png
https://mars.nasa.gov/system/internal_resources/details/original/1746_Figure_A.jpeg
https://mars.nasa.gov/…/1749_PIA26205-FigB_%28Web%29.jpeg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}