
Rozsáhlý nácvik lunární mise podstoupili operátoři ve středisko ESOC s týmem geologů a astronautem Thomasem Reiterem, když testovali proces, při kterém dálkově ovládané vozítko odebíralo vzorky hornin. Vše probíhalo tak, jako by astronaut pobýval na oběžné dráze Měsíce, ačkoliv se nacházel v hotelovém pokoji sicilského města Catania. Rover byl v té době přibližně o 23 kilometrů dál a 2600 metrů výš – na svahu sopky Etny. Reiter dával roveru pokyny ke sběru kamenů a jeho ruka zažívala, co cítil robotický manipulátor – tím se k dálkovému ovládání přidala další úroveň prožitku.

Zdroj: https://www.esa.int/
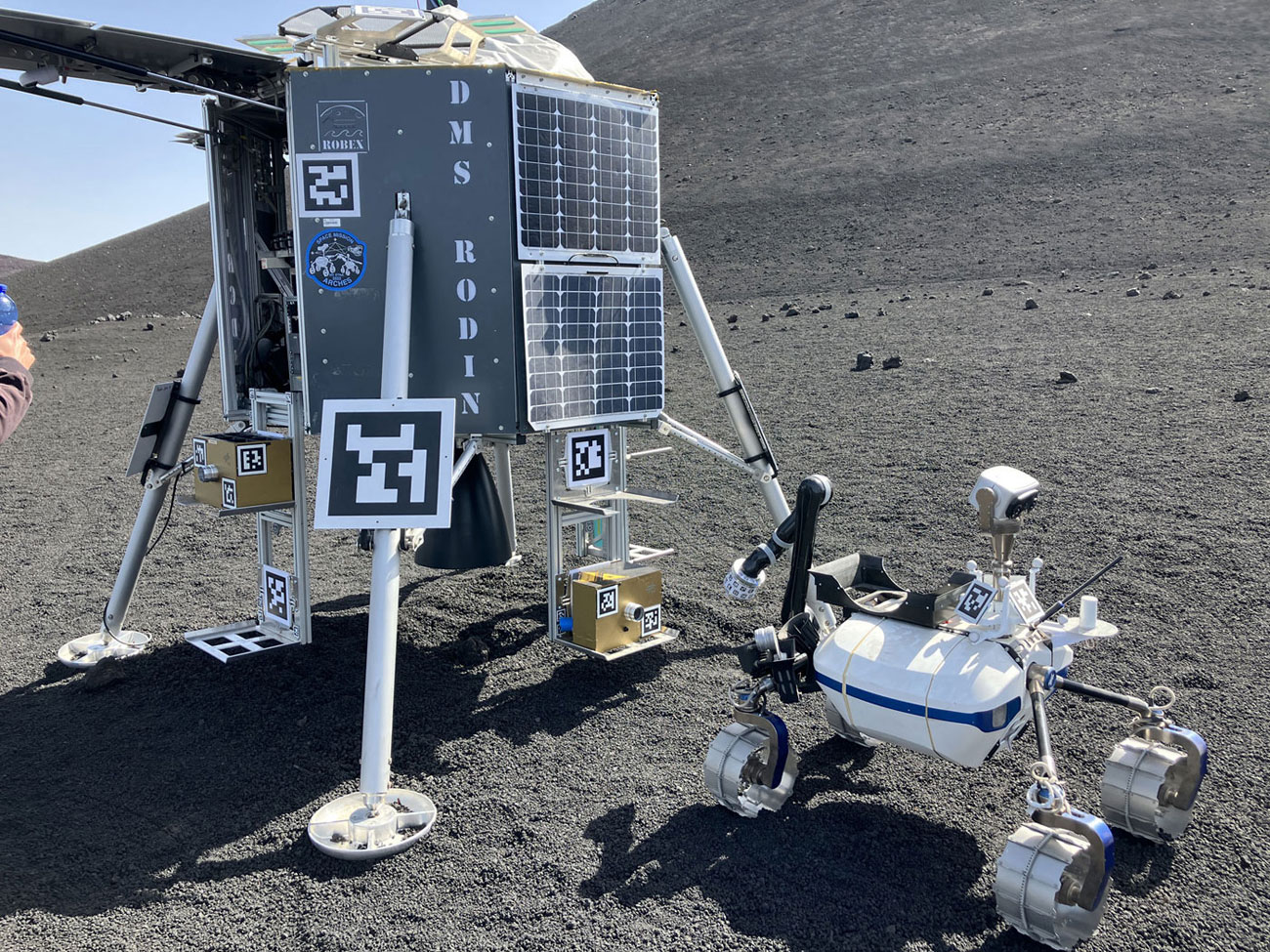
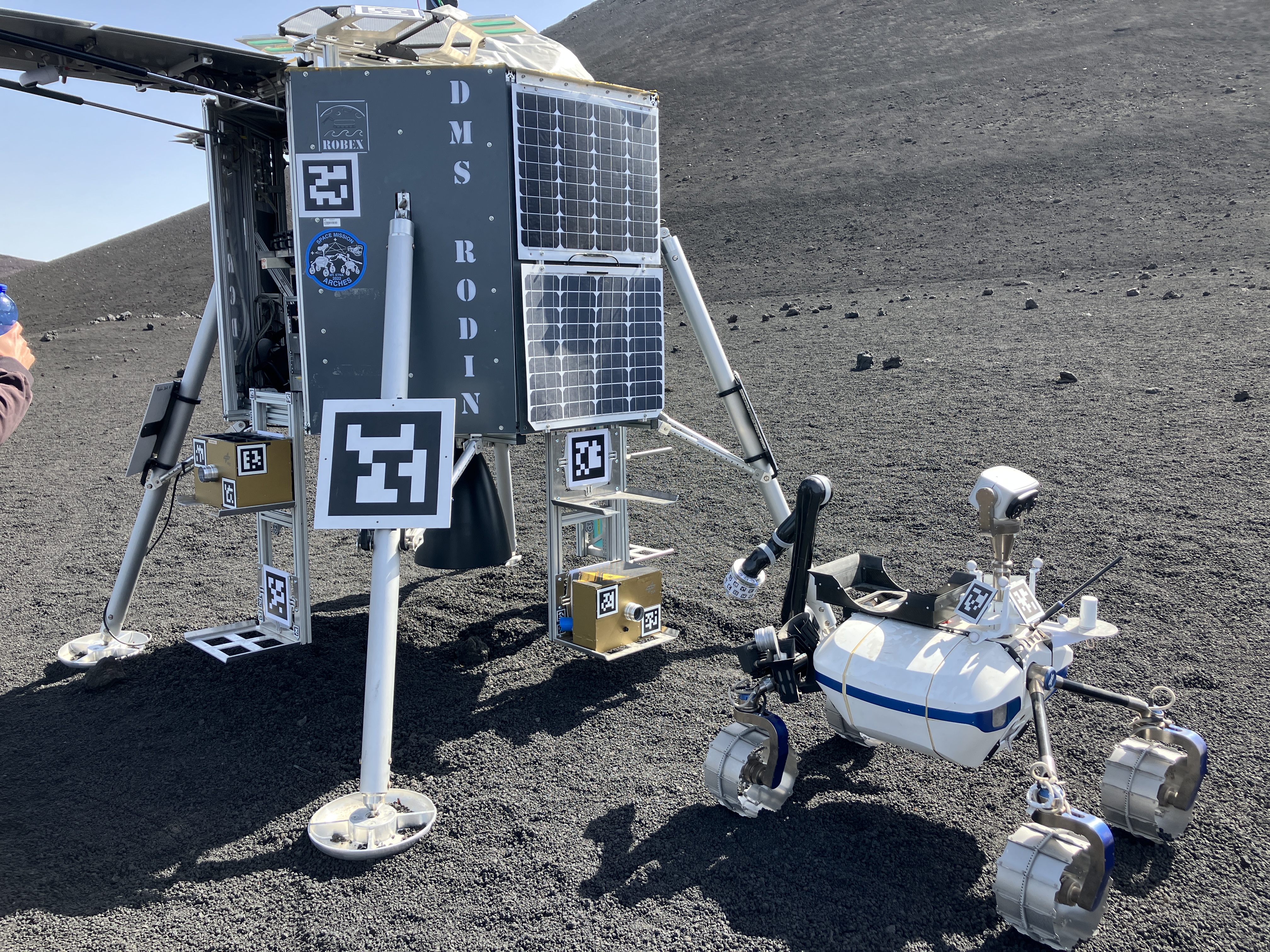
Šlo o závěrečnou část projektu Analog-1, který vedla agentura ESA. Šlo o součást větší multiagenturní kampaně organizované německou agenturou DLR. Projekt ARCHES (Autonomous Robotic Networks to Help Modern Societies) ověřoval schopnosti několika autonomních robotů spolupracovat a sdílet data na síťovém principu. Evropská kosmická agentura do testu dodala čtyřkolové vozítko Interact s dvojicí manipulátorů, které postavili experti z Human Robot Interaction Lab. Rover byl pro pohyb na nerovných svazích sopky řádně přizpůsoben. Interact se na místě přidal k širšímu robotickému týmu, který tvořily dva malé německé rovery LRU (Lightweight Rover Unit) 1 a 2, dále stacionární lunární „lander“ RODIN, který ve svém okolí vytvářel Wi-Fi síť a nabíjel rovery. Byl tu také dron pro povrchové mapování. Technologický institut z Karlsruhe ještě dodal stroj Scout, který svým plazivým pohybem připomínal stonožku. Jeho výhodou je, že dokáže fungovat jako retranslační bod mezi landerem a roverem Interact, čímž značně rozšiřuje efektivní prozkoumatelnou oblast.
Zdroj: https://www.esa.int/
Když rover doručil k landeru odebrané kameny, skončila tím čtyřdenní simulovaná mise, v rámci které měl rover přistát na Měsíci, aby tu odebral vzorky hornin. Přitom jej ze Země ovládalo operační středisko, astronaut na lunární stanici Gateway a vše se konzultovalo s geology. Skutečnost byla taková, že simulace byla řízena ze střediska ESOC, zatímco astronaut a vědci pobývali v oddělených místnostech sicilského hotelu. „Takováto simulovaná mise je v podstatě hrou, ve které zúčastnění hrají role. Je proto velmi důležité, aby zapojení účastníci zažili kompletní ponoření do děje,“ vysvětluje Kjetil Wormnes, projektový manažer Analog-1 a dodává: „V tomto případě to znamenalo, že všichni – od operátorů roveru v ESOC, přes vědce v jejich místnosti až po astronauta na palubě naši simulované Gateway – se potřebovali cítit, jako kdyby byl rover opravdu na Měsíci. Etna byla zvolena jako místo konání této analogové zkoušky pro svou geologii, která připomíná Měsíc. To umožnilo hlubší ponoření zapojených účastníků do děje, ačkoliv astronaut a vědci byli jen v různých místnostech v nedaleké Catanii.“
Zdroj: https://www.esa.int/
Pro maximální realističnost bylo do signálu uměle přidáno sekundové zpoždění, což je ekvivalent doby, kterou by potřeboval signál k cestě mezi Gateway a povrchem Měsíce. Toto zpoždění se týkalo i zpětné vazby ovládacího zařízení, které ovládal astronaut. „Bylo to složité nastavení, ale systémy pracovaly extrémně dobře. Naučili jsme se mnoho věcí o provozu roveru na Měsíci, které nám v budoucnu pomohou to samé udělat v reálu. Velice nás to potěšilo, protože dostat se do tohoto bodu vyžadovalo hodně práce. Navíc testy na Etně byly opakovaně odkládány kvůli covidu-19“ vysvětluje Wormnes.

Zdroj: https://www.esa.int/
Jeho slova potvrzuje i Thomas Reiter: „Hodně jsme se naučili o spolupráci mezi pozemním řídícím střediskem a posádkou na palubě stanice obíhající kolem Měsíce. Obě střediska ovládala rover na povrchu. Taková sdílená spolupráce může být velice efektivní – dokonce bych řekl, že je mnohem efektivnější, než pokud by to měla obstarávat pouze jedna strana.“ Přínosy v simulaci vidí i Thomas Krueger z Human Robot Interaction Lab: „Dnešní úspěch je fascinující, protože nyní můžeme považovat metodu řízení se zpětnou vazbou za ověřenou a připravenou k předložení našim mezinárodním partnerům při plánování budoucího lunárního průzkumu. K tomuto okamžiku vedla dlouhá cesta. Náš tým začal na konceptu pracovat před více než deseti lety a postupně jsme přidávali komplexnost. Začali jsme jednoduchým joystickem, který mohl být dálkově řízený astronautem na oběžné dráze. Studovali jsme tak vnímání zpětné vazby v mikrogravitaci. Poté jsme v naší laboratoři vyvinuli rover Interact, který je stavěný na dálkové ovládání z vesmíru. Následovala první kompletní testovací kampaň Analog-1, v rámci které třeba Luca Parmitano z paluby ISS ovládal rover na simulovaném lunárním terénu v nizozemském hangáru.“

Zdroj: https://www.esa.int/
Jediný test, který zbýval, měl prokázat, zda se systém dokáže vypořádat s nepředvídatelností venkovního prostředí v přírodě. Právě to se nyní podařilo díky kampani na Etně. Nebylo to však jednoduché. Thomas Reiter se potýkal se strmými svahy i tím, že kola roveru uvízla v písku. I přes tyto komplikace se podařilo odebrat vzorky a dopravit je k vyčkávajícímu landeru. „Do vozítka jsme dostali mnoho chytrých systémů. Velmi brzy jsme zjistili, že nepřetržitý vzdálený dohled byl pro astronauta-operátora hodně náročný. Přidali jsme proto některé prvky, které část tohoto tlaku z jejich beder odstranily. Je to něco na způsob jízdních asistentů v moderních autech. Například operátor může zadat roveru místo a stroj se sám rozhodne, jak se tam bezpečně dostat. Jeho neurální síť byla naprogramována tak, aby sama dokázala rozeznat vědecky cenné horniny. Díky tomu se operátor může soustředit na prioritní úkoly, které člověk zvládne nejlépe. Ukázalo se, že jsme rover poslali do terénu, který je pro kolová vozidla dost náročný, takže jsme si opravdu oddychli, když jsme viděli, jak to dopadlo,“ vzpomíná Krueger.
Zdroj: https://www.esa.int/
V úplně posledním dni testů ještě rovery spolupracovaly při umísťování antén LOFAR na optimální místa „lunárního“ povrchu za účelem provádění radioastronomických pozorování. Ve skutečnosti se jednalo o pracovní modely a astronomové pak na sopce strávili noc, během které prováděli rádiové skenování oblohy a úspěšně zachytily rádiové pulsy od Jupiteru, které způsobil přechod vulkanického měsíce Io skrz magnetické pole planety. „Jsem si jistý, že jsme perfektně připraveni na druhou polovinu této dekády, kdy budeme provádět stejný typ sdílených operací mezi Zemi a kosmickou stanicí, které budou ovládat rover na povrchu Měsíce,“ poznamenal Rieter a dodal: „Přijde chvíle, kdy i evropští astronauti zanechají na povrchu Měsíce své stopy! I v takovém případě bude společný provoz robotů a posádky na povrchu mimořádně efektivní.“
Přeloženo z:
https://www.esa.int/
Zdroje obrázků:
https://www.esa.int/…/24345279-1-eng-GB/Two-armed_four-wheeled_Interact_rover.jpg
https://www.esa.int/…/24344973-1-eng-GB/Interact_rover_by_lunar_lander.jpg
https://www.esa.int/…/24344421-1-eng-GB/LRU_rover_at_lunar_lander.jpg
https://www.esa.int/…/scout_crawler/24345326-1-eng-GB/Scout_crawler.gif
https://www.esa.int/…/24344673-1-eng-GB/Thomas_Reiter_at_the_controls.jpg
https://www.esa.int/…/24345416-1-eng-GB/Base_camp_on_Mount_Etna.jpg
https://www.esa.int/…/24345371-1-eng-GB/Interact_brings_samples_to_lander.gif




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}