
I v tomto díle naší krátké série, která je věnována sekundárnímu nákladu mise Artemis I, se podíváme na další zajímavý CubeSat. I ten se sveze na misi, při které vůbec poprvé odstartuje super raketa SLS, která vyšle v nepilotovaném režimu loď Orion na oblet Měsíce. Generálka před návratem lidí na Měsíc s sebou poveze deset CubeSatů, které mají mnohdy zcela unikátní mise, které před nimi žádné malé družice ještě neprováděly. I CubeSat ArgoMoon je v mnohém průkopnickou misí, která je přípravou na dlouhé lety daleko od Země, budoucí servis družic v kosmickém prostoru a otestuje i schopnost pohonného systému malých družic. Pojďme se na něj podívat blíže.

Zdroj: https://blogs.nasa.gov/
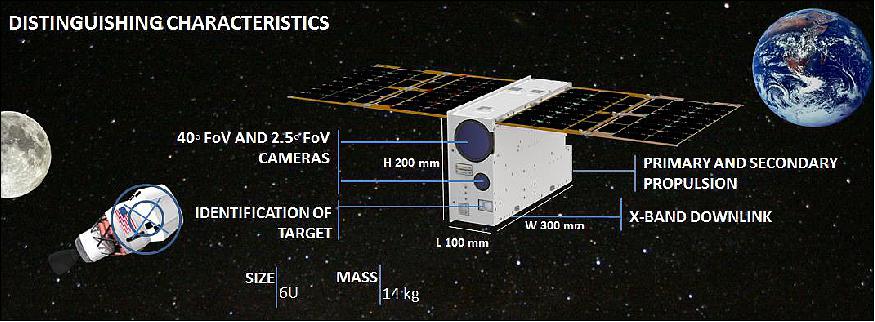
ArgoMoon byl vyvinut v italské společnosti Argotec z Turína ve spolupráci s italskou kosmickou agenturou a ESA. Jeho primární cíl je na první pohled jednoduchý. Díky tomuto CubeSatu bychom se měli dočkat detailních fotek horního stupně rakety SLS s označením ICPS ve vysokém rozlišení. Později pak snímků Země a Měsíce. ArgoMoon totiž bude první CubeSat, který bude ze stupně ICPS vypuštěn, ustálí se tak, aby letěl společně s tímto stupněm a bude sledovat vypouštění dalších CubeSatů, stejně jako dokumentovat výše zmíněný druhý stupeň pro pozdější analýzu NASA. K tomuto na první pohled jednoduchému úkolu však bylo vyvinuto několik velmi propracovaných systémů a softwaru, který takovou záležitost s tak malým (14 kilogramů) 6U CubeSatem zvládne.
Družice je pro tento účel vybavena hned několika propracovanými systémy. Ihned po vypuštění ze stupně ICPS se CubeSat bude muset sám stabilizovat a zorientovat. K tomu využije jak svůj pohonný systém, tak i pokročilý navigační autonomní systém, který je vybaven dvěma palubními kamerami k nalezení stupně, na který se pak zaměří a zorientuje se dle něj. NASA kolem ICPS vytvořila ochranné pásmo do vzdálenosti 100 metrů, které bude muset ArgoMoon dodržovat, k čemuž využije svůj dálkoměr. Následovat bude několik obletů kolem stupně, k čemuž opět využije svůj navigační software, pohon i kamery a podrobné focení všech částí stupně. NASA fotografie použije jednak jako připomínku důležitého okamžiku počátku misí Artemis a také pro zdokumentování stavu stupně po premiérovém startu SLS. Pro společnost Argotec je to zase skvělá příležitost ověřit několik pokročilých systémů.
ArgoMoon je osazen těmito základními systémy a přístroji:
Zdroj: https://blogs.nasa.gov/
PL – optická část vybavení, která se skládá ze dvou snímačů ve viditelném spektru, který je každý osazen jinou optikou. Nachází se tam širokoúhlá kamera, která bude využívána navigačním softwarem k hledání cíle a následnou orientaci dle tohoto cíle. Na palubě je pak druhá optika s užším zorným polem, která se postará o pořizování snímků v rozlišení 4096 × 3072 pixelů. Vnitřní software je pak schopen zpracovat snímek do různých formátů (RAW, GrayScale, RGB) podle potřeb mise.
RF – dálkoměr, který měří vzdálenost mezi stupněm ICPS a CubeSatem. Rozlišení vzdálenosti je 10 centimetrů. Dálkoměr bude společně s navigačním softwarem udržovat vzdálenost 100 metrů od stupně. Měřit dokáže až do vzdálenosti 5 kilometrů.
EPS – řídicí systém rozvodu energie. Tento systém primárně řídí energii produkovanou solárními panely mířící do akumulátoru. Zde je systém upraven tak, aby aktivně reagoval na změny v napětí a přizpůsoboval proud směřující do akumulátoru a naopak z něj ven. Součástí je průběžné vyhodnocování stavu celého rozvodného systému, který bude pod radiační palbou okolního kosmického prostředí.
MiPS – pohonný systém. Jedná se o mikropulzní hybridní pohon skládající se ze dvou oddělených systémů, který zabírá 1,3U (U je jedna jednotka o rozměru 10 × 10 × 10 centimetrů) celého CubeSatu. Hlavní motor družice využívá jednosložkové „zelené“ palivo a motor má tah 100 mN. Celková změna rychlosti (Δv) je 56 m/s. Druhá část pohonného systému je tvořena čtyřmi mikropulsními tryskami o tahu 25 mN, které využívají stlačeného plynu. CubeSat si veze 420 gramů jednosložkového paliva a 215 gramů stlačeného plynu. Řízení motorů pak obstarává mikrokontrolér a celková spotřeba systému v klidovém stavu je 1 Watt.
ADCS – polohový systém. Pro schopnost orientovat se v prostoru a provádět změny orientace se využívá ještě jeden systém, který se skládá ze sledovačů hvězd, dvou slunečních senzorů a silových setrvačníků. Setrvačníky se využívají k jemnému natáčení CubeSatu.
Zdroj: https://blogs.nasa.gov/
TMTC – telemetrický systém. Ten využívá soustavu antén umístěných na spodní i horní straně CubeSatu k posílání a přijímání telemetrických údajů a příkazů.
OBC – upravený palubní počítač. Řídí všechny systémy a subsystémy na palubě CubeSatu a je schopný vyhodnocovat data z PL optické části CubeSatu. Skládá se ze dvoujádrového procesoru a několika typů pamětí a dalších mikroprocesorů. V architektuře počítače jsou použity jak lety osvědčené komponenty (procesor), tak řada nově vyvinutých komponent (Programmable Gate Array – FPGA), které jsou zde pro ověření pro použití na dalších misích, které budou směřovat dále od Země.
Během letu se totiž bude věnovat pozornost výdrži všech systémů. CubeSat se bude pohybovat v radiačně velmi náročném prostředí, které bude pro použitou elektroniku výzvou. Výdrž jednotlivých komponent pak bude vyhodnocena pro další použití pro mise, které se vydají dále od Země. Po nafocení stupně ICPS totiž mise CubeSatu neskončí.

Zdroj: https://blogs.nasa.gov/
Až bude stupeň nafocen, upraví si CubeSat svým pohonem oběžnou dráhu na vysoce eliptickou geocentrickou, která v nejvyšším bodě dráhy bude umožňovat fotografování soustavy Země – Měsíc. Díky tomu se tak dočkáme doposud stále vzácných snímků. Na této dráze by CubeSat měl zůstat několik měsíců do postupného opotřebování.
S tím, jak bude ArgoMoon stárnout, nastoupí další analytický software, který je vytvořen tak, aby ověřil schopnost nacházení případných poruch a chyb. Tento autonomní analytický program je schopný určit, kde nastal problém (typicky přepětí u akumulátoru, poškození některé části rozvodů, či počítače) a sám vyhledat nejvhodnější řešení této závady. Pokud bude závada příliš rozsáhlá a software si s ní nebude umět poradit, přepne družici do nouzového stavu a počká na příkazy ze Země.
Tento pokročilý analytický software je testovací kampaní firmy Argotec pro budoucí mise směřující dále za nízkou oběžnou dráhu i do hlubokého vesmíru. Tyto mise by měly být schopné autonomně přímo reagovat na případná poškození a řešit následky i nápravu těchto poškození. S tím je spojena i výbava CubeSatu, který je osazen odolnými počítači a velká pozornost byla věnována akumulátoru a systému distribuci energie, který poctivě hlídá, aby nikde nedošlo k přepětí. Výsledky této mise pomohou budoucím výpravám. Půjde o mise, které budou směřovat do meziplanetárního prostoru, budou působit v radiačně náročných podmínkách, mise s vysokou mírou autonomního vyhodnocování, či pokročilé opravárenské mise starších družic.
Zdroje informací:
https://cubesat-propulsion.com/
https://space.skyrocket.de/
https://blogs.nasa.gov/
https://directory.eoportal.org/
Zdroje obrázků:
https://directory.eoportal.org/web/eoportal/satellite-missions/content/-/article/argomo-2
https://blogs.nasa.gov/…/KSC-20210714-PH-ILW01_0033-low-res-1024×682.jpg
https://blogs.nasa.gov/…/KSC-20210714-PH-GEB02_0007_low-res-682×1024.jpg
https://blogs.nasa.gov/…/KSC-20210708-PH-GEB02_0008-low-res-1024×576.jpg
https://www.ecaps.space/assets/img/argomoon.jpg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
Obdoba čínského focení satelitu u Marsu?
Ten se ale tak nevzdaloval.
To je trochu jiná kategorie. Od čínské družice u Marsu odletěla kamerka bez vlastní stabilizace a dalších systémů. ArgoMoon je zmenšenina poměrně komplexní sondy se systémem orientace a vlastním pohonem. 🙂
Díky za článek! Každopádně je to poměrně komplexní družice na relativně malý cubesat. Pohonné a komunikační systémy, orientace gyroskopy, to dřív zvládaly jen nesrovnatelně mohutnější družice. Až třeba zvládnou i iontový pohon a tím i ještě výraznější změny dráhy, bude to super.
Exotrail (6U) s hallovym motorem letel koncem roku 2020…
R.