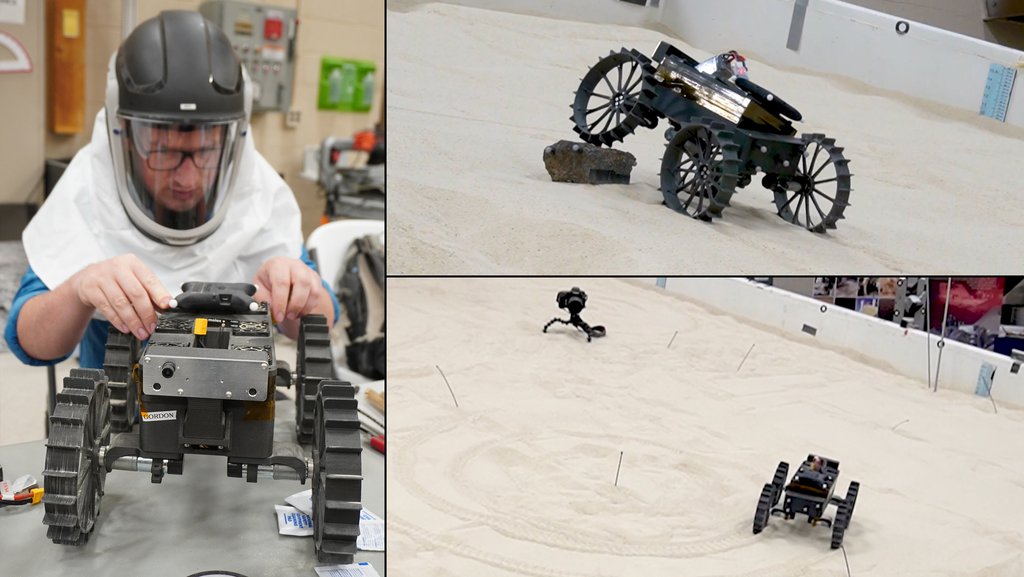
Laboratoř SLOPE (Simulated Lunar Operations) na Glennově středisku nedávno využil tým, který vyvíjí malá vozítka. V místnosti, která simuluje povrch Měsíce se malé rovery snažily jezdit po regolitu, aby inženýři lépe porozuměli výzvám, které na vozítka těchto velikostí čekají na povrchu Měsíce. Získané poznatky budou využity pro charakteristiku chování vozítek a zlepšení návrhu jejich mobility. Projekt CADRE (Cooperative Autonomous Distributed Robotic Exploration) vyvíjí roboty, kteří jsou naprogramováni, aby pracovali jako autonomní tým studující povrch Měsíce, sbírající data a 3D mapující různá místa Měsíce. Každé vozítko se může pohybovat nezávisle na ostatních a společně tak mohou provádět distribuovaná měření, která by byla pro jeden velký rover prakticky nemožná. Základ autonomní technologie pro projekt CADRE by se dal případně využít i na jiných kosmických tělesech jako je třeba Mars.

Zdroj: https://www.nasa.gov/
Výzkumníci z kalifornské JPL zodpovědní za projekt CADRE spolupracovali s inženýry ze SLOPE, aby zjistili, zda malá vozítka dokáží zvládnout náročné lunární prostředí s jemnozrnným povrchem. „Sledovali jsme trakci kol za různých podmínek,“ popisuje Alex Schepelmann, hlavní robotik laboratoře SLOPE a dodává: „Samotná kola jsou také testována, abychom ověřili, jestli dokáží překonávat velké měsíční kameny, nebo šplhat po našich svazích, které simulují kopce na povrchu Měsíce.“ Experti ze SLOPE navíc využili pokročilé snímací metody, aby určili úroveň prokluzu kol na simulovaném lunárním povrchu, což může ovlivnit schopnost vozítka určit pomocí palubních senzorů svou pozici.
„Když kolo proklouzne, může si rover myslet, že dojel dál, než kde ve skutečnosti je, protože na Měsíci jsme zatím ještě GPS systém nevybudovali,“ říká Schepelmann. Určení míry prokluzu je důležitým vstupním údajem pro algoritmy v počítačích vozítek při určování pozice. Software programu CADRE kromě toho využívá data z inerciální měřící jednotky, stereo kamer a slunečních senzorů, aby sledoval pohyb všech průzkumníků. Podle Schepelmanna mají vozítka CADRE využívat podobná kola, jaká dostane lunární rover VIPER, který má koncem roku 2023 letět k Měsíci, kde bude pátrat po ledu a dalších zdrojích. Testy malých vozítek budou pokračovat a během pěti let by se mohli jejich nástupci vydat na Měsíc v rámci programu CLPS jakožto technologické demonstrátory.
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://d2pn8kiwq2w21t.cloudfront.net/images/1_cadre-mosaic1.width-1024.jpg
http://www.nasa.gov/sites/default/files/thumbnails/image/cadre_thumbnail_2.jpg





{kind=link}
{kind=link}