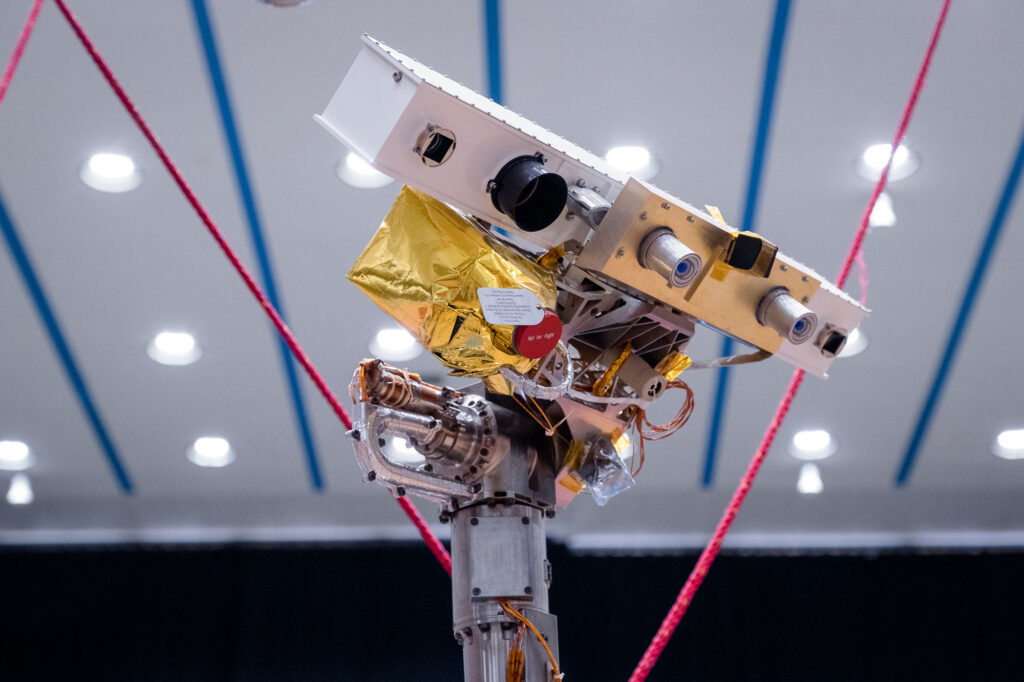
Ať už jde o panoramatické snímky, nebo detailní fotky, 3D mapy terénu, či kontrolní snímky kol, pozemské dvojče evropského roveru Rosalind Franklin zkouší široké spektrum nastavení snímání, aby letový hardware mohl z Marsu v rámci mise ExoMars přinést ty nejlepší vědecké poznatky. Vědecké oči v rámci této mise představuje soubor panoramatických kamer zkráceně označovaný PanCam. Neletový exemplář na „hlavě“ pozemského testovacího roveru Ground Test Model dosahuje podobné úrovně detailů, jaká se očekává od vozítka Rosalind Franklin po jeho přistání na Marsu v roce 2023.
Zdroj: https://www.esa.int/
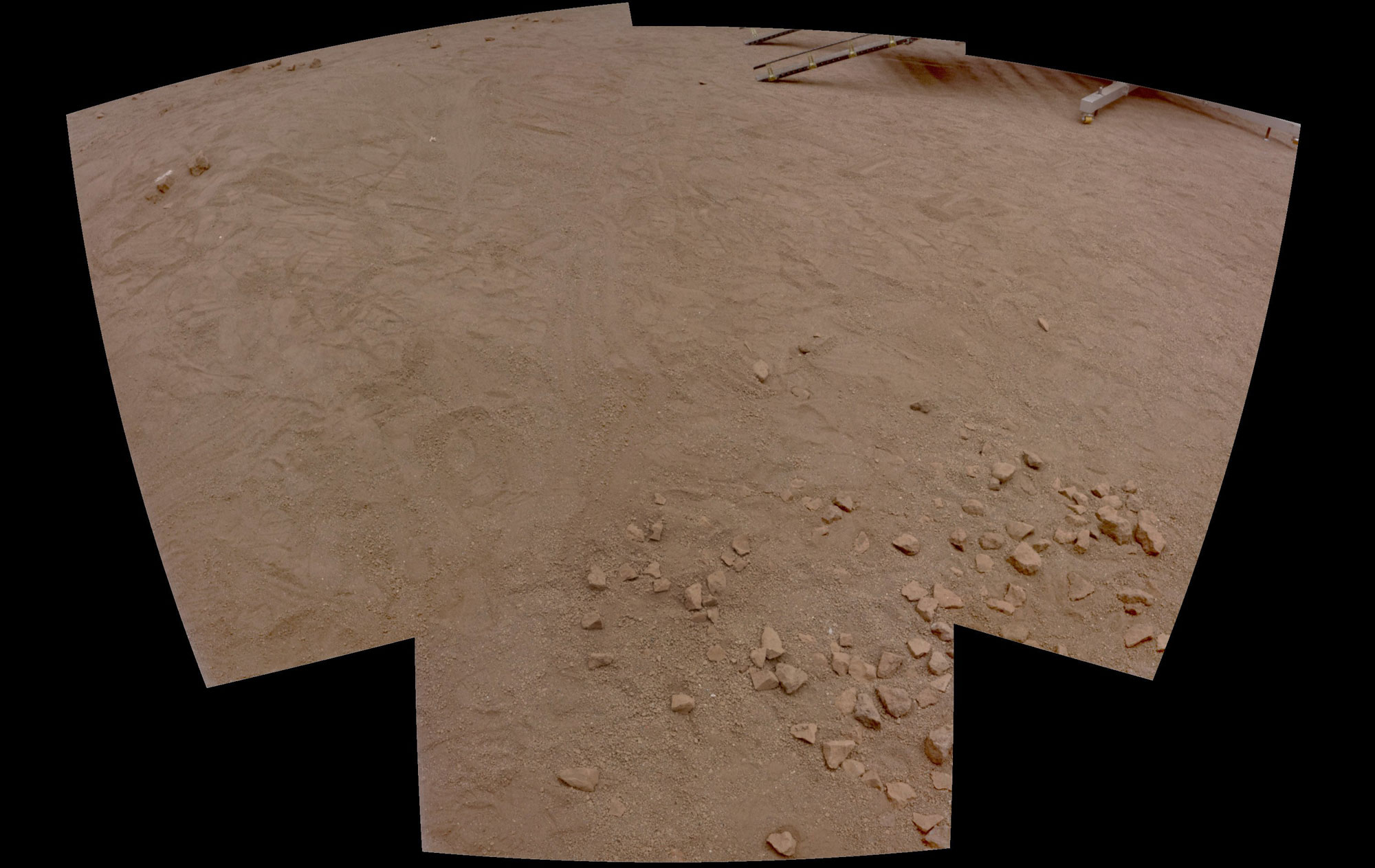
Cílem těchto kamer v uplynulých měsících byl načervenalý, občas kamenitý terén v simulátoru marsovského terénu u italského Turína. „Jelikož budeme na Marsu pátrat po vodě a životě, jsou zkoušky hlavních kamer roveru Rosalind Franklin obzvláště důležité pro hledání minerálů bohatých na vodu,“ vysvětluje Andrew Coates, hlavní vědecký pracovník PanCam a také profesor na britské UCL Mullard Space Science Laboratory. PanCam nemá jen jeden pár, ale rovnou tři vědecké oči. Jedna kamera má vysoké rozlišení, zbylé dvě jsou širokoúhlé. Jejich unikátní schopnost barevného focení umožňuje „identifikaci na vodu bohatých minerálů a perfektní 3D rozhled, který je mnohem lepší než mají lidské oči. Pohledy přes PanCam nám nabídnou klíčový vhled do tajů marsovského terénu,“ vysvětluje Coates
Inženýři do kamerového systému napěchovali maximální množství vědy. Dvě širokoúhlé kamery WAC jsou od sebe vzdáleny 50 centimetrů a vytváří stereo dvojici, která z výšky zhruba dvou metrů snímá, co se nachází před vozítkem. Vědci pak ze snímků vytváří 3D obrázky a hloubkové mapy tím, že kontinuálně pořizované snímky skládají přes sebe. „Kromě hledání cesty, kterou se může rover vydat, nám tyto kamery pomohou s prováděním geologického výzkumu a studiem atmosféry,“ doplnil Coates.
Zdroj: https://www.esa.int/
Kamera s vysokým rozlišením HRC má osmkrát lepší rozlišení než širokoúhlé kamery a bude sloužit k detailní barevné analýze textur kamenů a velikosti zrn materiálu na povrchu. Tato výkonná kamera „nám pomůže prostudovat velmi jemné detaily kamenů a regolitu, najít nejvhodnější místo k vrtání a pořídí také snímky vzorků, než budou poslány do laboratoře vozítka,“ říká Nicole Schmitz, spoluvedoucí vědecká pracovnice kamery s vysokým rozlišením z Institutu planetárního výzkumu německé agentury DLR. Kameru HRC bychom našli usazenou pod infračerveným spektrometrem ISEM, který analyzuje geochemické vlastnosti hornin. HRC a ISEM jsou přitom sehraná dvojka. Jejich zorná pole jsou sladěná, takže vědci mohou na snímcích HRC vidět, kde zrovna ISEM provádí měření.

Zdroj: https://www.esa.int/
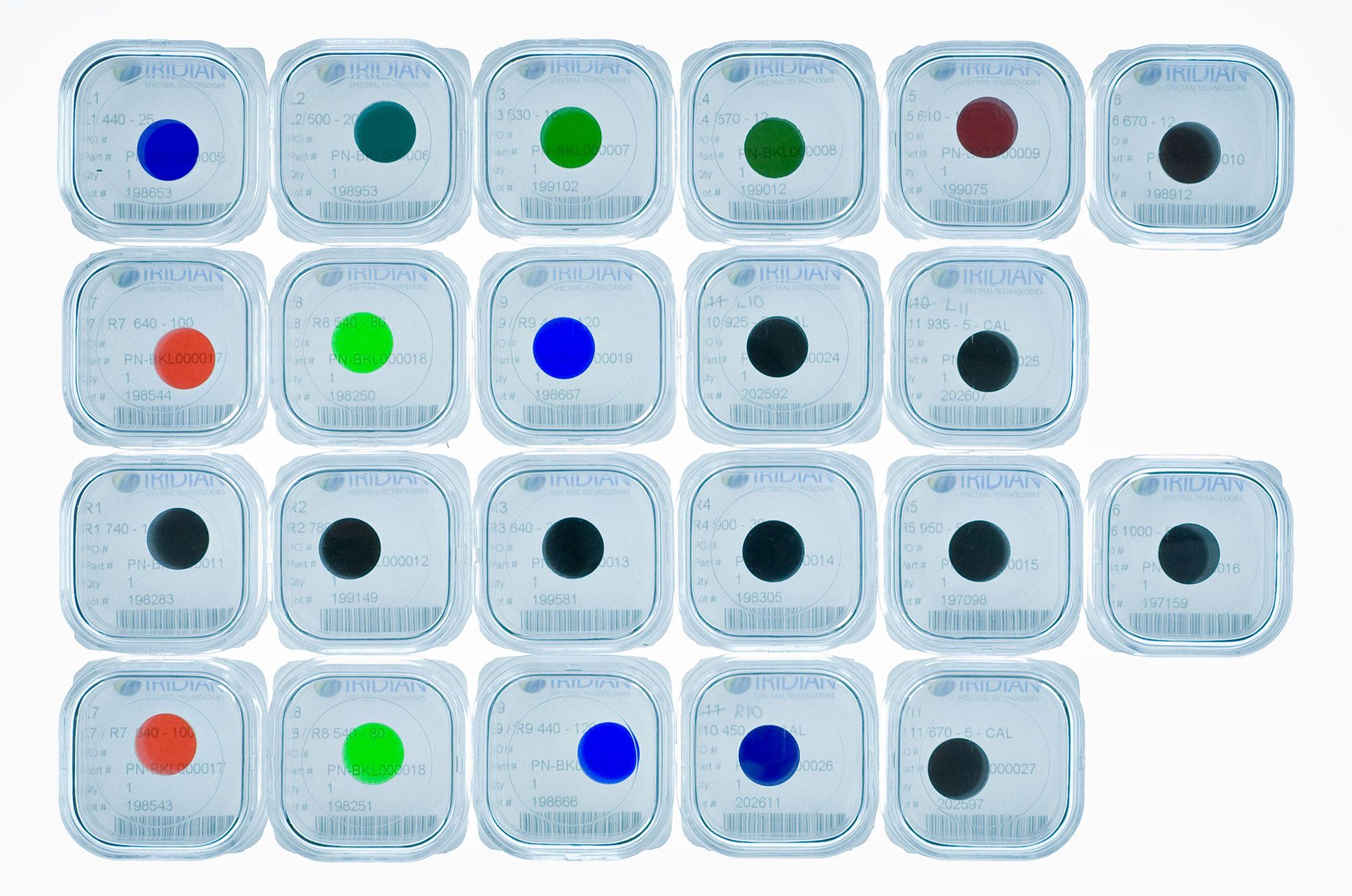
Lidé mohou vidět pouze barvy ve viditelném světle. PanCam uvidí v 19 „barvách“, které najdeme ve viditelné, ale i blízké infračervené oblasti elektromagnetického spektra. Každá širokoúhlá kamera má otočné kolo s filtry, které má 11 pozic. Filtry odpovídají vlnovým délkám barev pro pozorování kamenů či marsovské oblohy. Speciální otočný mechanismus umožní roveru hledět na Slunce a přitom se bude určovat množství prachu v atmosféře či měřit obsah vodní páry během západů slunce. Kalibrační terčík umístěný na horní ploše fotovoltaických panelů tvoří paleta barevných sklíček, která jsou podobná těm, která najdeme v kostelních vitrážích. Úkolem terčíku je pomoci PanCam určit správně barvy, které vidí.
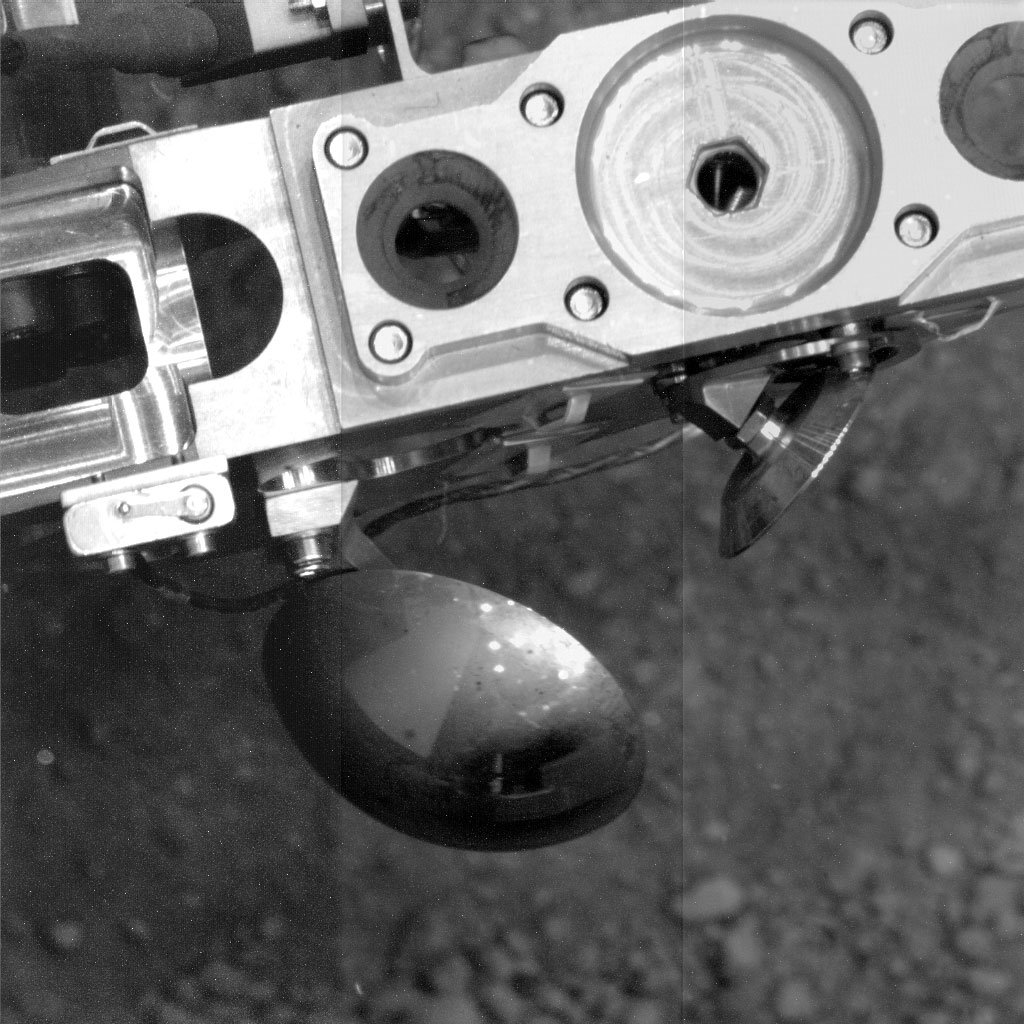
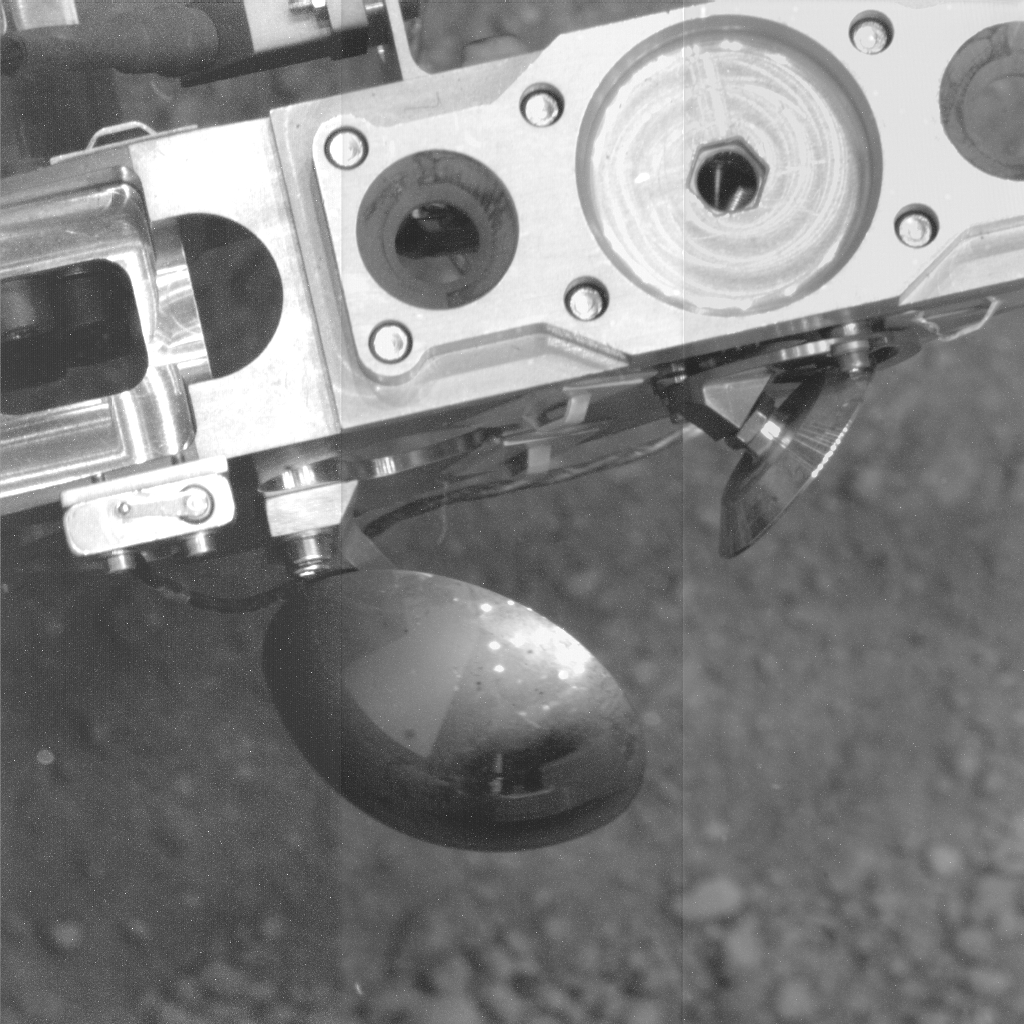
PanCam dokáže odolat mnohem drsnějším podmínkám než běžné kamery třeba v mobilních telefonech. Hardware si poradí s extrémními teplotami od nuly do -120 °C během chladných marsovských nocí. Senzory jsou také odolné vůči silnému kosmickému záření, které na ně čekají ať už během přeletu meziplanetárním prostorem, tak i na povrchu rudé planety. „Byla to výzva, postavit dostatečně odolnou kameru s měnitelným ostřením pro pořizování fotek s vysokým rozlišením, ať už snímáme blízké, nebo vzdálené cíle,“ říká Schmitz. Rosalind Franklin ale bude také snímat sebe sama. Malé vypouklé zrcátko Rover Inspection Mirror u jednoho kola roveru bude možné využít pro pohled pod vozítko. Na roveru ale najdeme ještě jednu kameru, kterou testy focení teprve čekají. Kamera CLUPI poskytne detailní pohledy na regolit dopravený na povrch během vrtání. V době, kdy vrtačka zaujme parkovací pozici, bude možné tuto kameru použít k focení terénu vedle vozítka.
Zdroj: https://www.esa.int/
Přeloženo z:
https://www.esa.int/
Zdroje obrázků:
https://www.esa.int/…/2021/07/rover_eyes/23418303-1-eng-GB/Rover_eyes.jpg
https://www.esa.int/…/23766267-1-eng-GB/Panoramic_mosaic_for_Mars.jpg
https://www.esa.int/…/19408582-1-eng-GB/ExoMars_PanCam_filters.jpg
https://www.esa.int/…/23766385-2-eng-GB/ExoMars_calibration_target.jpg
https://www.esa.int/…/23766473-1-eng-GB/ExoMars_inspection_mirror.jpg




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Perfektní článek.