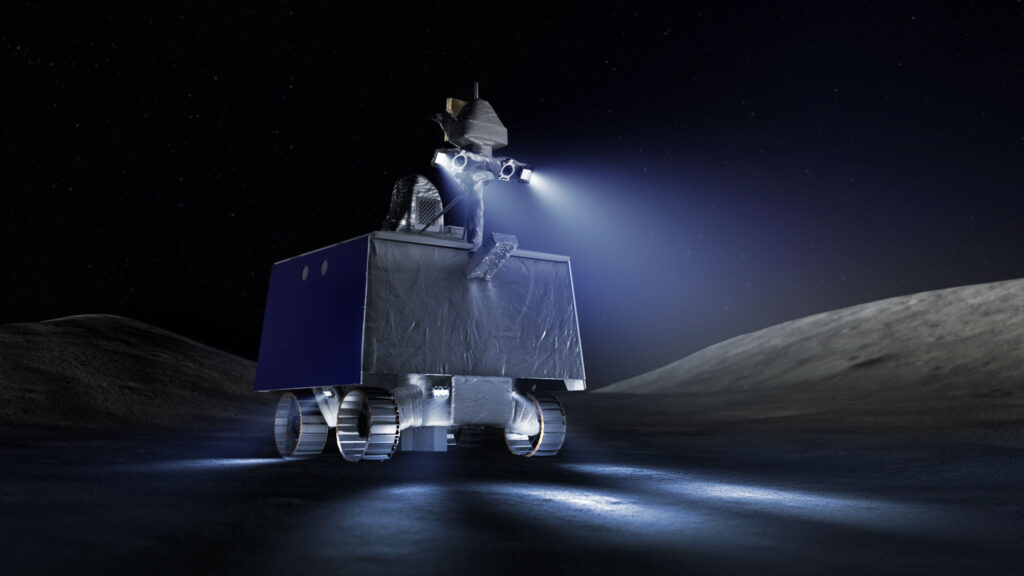
První americké autonomní lunární vozítko VIPER (Volatiles Investigating Polar Exploration Rover) prošlo kritickým zhodnocením návrhu CDR. Jde o mimořádně důležitý milník, který dokazuje, že rover dokončil fázi návrhu a nezávislá hodnotící komise NASA schválila představené materiály. Experti zodpovědní za tuto misi se tedy nyní mohou zaměřit na stavbu vozítka, které má být spojeno s lunárním landerem Griffin od firmy Astrobotic, aby následně celá sestava odstartovala na raketě Falcon Heavy od SpaceX. Doručení na Měsíc proběhne v rámci programu CLPS (Commercial Lunar Payload Services), který NASA zavedla pro dopravu nejrůznějších nákladů na povrch Měsíce s využitím komerčních lunárních landerů.
Zdroj: https://www.nasa.gov/
Rover VIPER, který organizačně patří pod křídla programu Artemis, spravuje Ames Research Center v kalifornském Silicon Valley. Hlavním úkolem vozítka je získat podrobné informace o přistávací oblasti a o koncentracích ledu i dalších zdrojů v okolí jižního pólu Měsíce. S využitím palubních přístrojů vyvinutých různými středisky NASA a také komerčními firmami, bude rover schopen odhalit a případně zmapovat, kde se na povrchu i pod ním nachází nejrůznější potenciálně využitelné zdroje, jako je třeba zmíněný vodní led. Tato mise mapující zdroje tedy posune NASA o významný kus blíže k dlouhodobému cíli v podobě dlouhodobé přítomnosti lidí na Měsíci. Vědci zároveň získaná data využijí k prohloubení dosavadních znalostí o původu lunární vody.
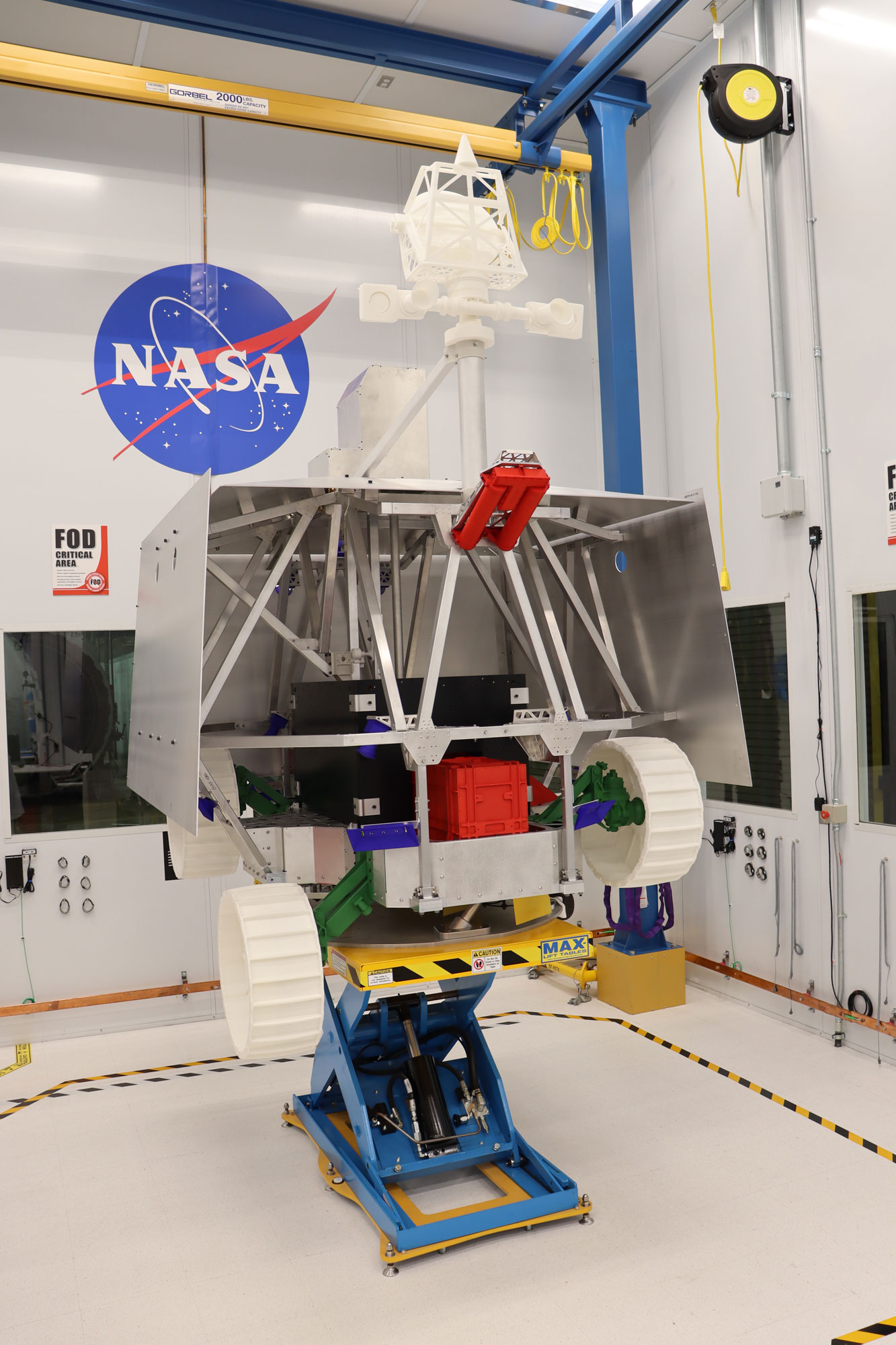
„Tým kolem projektu VIPER byl silně zaměřený na dokončení designové fáze této malé a chytré mise, což nás přivedlo k tomuto vyvrcholení v podobě hodnotícího procesu,“ popsal Daniel Andrews, projektový manažer mise VIPER a dodal: „Se schváleným designem se nyní může tým posunout k přeměně designových návrhů na reálný hardware, aby VIPER začal ožívat v roce 2022.“ Stavba roveru má začít koncem roku 2022 na Johnson Space Center v Houstonu, zatímco se v Ames bude pracovat na letovém softwaru a návrhu navigačního systému. Firma Astrobotic by měla přijmout dokončené vozítko se všemi vědeckými přístroji v polovině roku 2023, aby mohla vše připravit na start plánovaný později v témže roce.
Kritické zhodnocení návrhu CDR se zaměřuje na návrh všech palubních systémů. Cílem je ověřit, zda jsou systémy vozítka i vědecké přístroje schopné spolupracovat, což není snadný úkol. Překonání CDR bylo možné i díky dřívějším kritickým posuzováním návrhů CDA (Critical Design Assessments), v rámci kterých nezávislí hodnotitelé vyhodnocovali návrhy jednotlivých systémů pro rover VIPER. Prvotní CDA se zaměřovala na funkce jako jsou letové navigační systémy a software, systém pro hospodaření s teplem, mechanické systémy a podobně. Poté, co se při CDA prověřilo, že systémy jsou navrženy správně, bylo potřeba během CDR ověřit, zda jsou také schopny fungovat společně v rámci plně funkčního zařízení, které bude schopno prozkoumávat lunární povrch.
Zdroj: https://www.nasa.gov/
Od chvíle, kdy návrh roveru VIPER prošel předběžným zhodnocením návrhu PDR, se velmi výrazně prohloubila komplexnost návrhů všech systémů. Inženýři se zaměřovali na to, jak bezpečně provést maximální množství vědeckého výzkumu během pobytu na lunárním povrchu. Výběr přistávací oblasti u kráteru Nobile rozhodně nebyl náhodný. Výběr zohledňoval celkové schopnosti roveru VIPER a zároveň mířil do oblasti, kde bude možné splnit vědecké úkoly.
Po závěrečném schválení návrhu můžeme říct, že rover VIPER bude celkově vážit 449 kg a bude schopen pohybu rychlostí 0,2 m/s. O pohon se budou starat fotovoltaické panely a akumulátory, přičemž celkově bude možné dosáhnout maximální úrovně 450 W. VIPER také ponese systém, který nebývá na kosmických sondách běžný – světlomety. S jejich využitím budou moci palubní kamery poskytovat palubnímu systému informace o překážkách a dalších rizikových útvarech, když rover zajede do kráterů. Rover by měl udržovat spojení se Zemí pomocí komunikace se sítí Deep Space Network.

Zdroj: https://www.nasa.gov/
Komponenty roveru byly otestovány, aby odolaly extrémnímu lunárnímu prostředí a rover mohl zodpovědět klíčové otázky o složení Měsíce. S využitím příklepové vrtačky a tří vědeckých přístrojů bude VIPER analyzovat odvrtaný materiál, ve kterém bude pátrat po ledu a dalších užitečných látkách. Kromě toho má vozítko studovat vlastnosti lunárního regolitu a také plynů v jeho okolí. „Věda bude ovlivňovat misi VIPER v reálném čase, což bude velmi odlišné od všech předešlých misí,“ říká Anthony Colaprete, hlavní vědecký pracovník mise VIPER a dodává: „Je úžasné mít schválený design a vidět, jak se zhmotňují naše kolektivní vize této mise.“
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
https://www.nasa.gov/…/thumbnails/image/viper_cdr_hero_08_1920x1080_v06.png
https://www.nasa.gov/sites/default/files/thumbnails/image/ssitp_complete_5.jpg
https://www.nasa.gov/…/thumbnails/image/viper_software_integration_test-1041.gif
https://www.nasa.gov/sites/default/files/thumbnails/image/acd20-0069-038.jpg






{kind=link}
{kind=link}
{kind=link}
{kind=link}
Svetlomety napájané fotopanelmi je naozaj zvláštna kombinácia 🙂
Robot zájde do tieňa krátera,svetlomety vybijú batérie a koniec, znehybnie. Ak vypne svetlomety, aby šetril batérie, nebude vidieť cestu von.
NASA hodne riskuje, keď ho nevybavila rádioizotopovým generátorom.
Samozřejmě rover nebude trávit ve stínu více času, než bude nezbytně nutné. Akumulátory by tedy měly dostačovat.
Radioizotopový zdroj je sice fajn, ale značně by prodražil vývoj.
Domnívám se,že na cestu zpět bude počítáno s dostatečnou zálohou kapacity akumulátorů a v případě vlastní inerciální navigace snad nebude potřebovat vidět na návrat. Kromě toho radioizotopových zdrojů není nazbyt.
Už jste slyšel něco o tom, že Plutonium 238 je nedostatkovější zboží, než jahody v pohádce o dvanácti měsíčkách?