Zařízení pojmenované COLDArm (Cold Operable Lunar Deployable Arm) společně vyvíjí kalifornská Jet Propulsion Laboratory a firma Motiv Space Systems, která tak sídlí v Pasadeně. Po dokončení by měl tento projekt významným způsobem zlepšit schopnosti lunárních landerů. Robotický manipulátor totiž bude schopen pohybu i za velmi nízkých teplot, včetně těch, které nastávají během lunární noci. Tehdy bychom totiž na mnoha místech bez problémů naměřili i -173 °C. Robotická paže vyvíjená pro lunární lander využívá zkušeností velmi schopných výpočetních technologií z chytrých mobilních telefonů, které se používají i na marsovském vrtulníku Ingenuity a zvládnou provádět široké spektrum úkolů v extrémně nízkých teplotách bez potřeby vyhřívání.
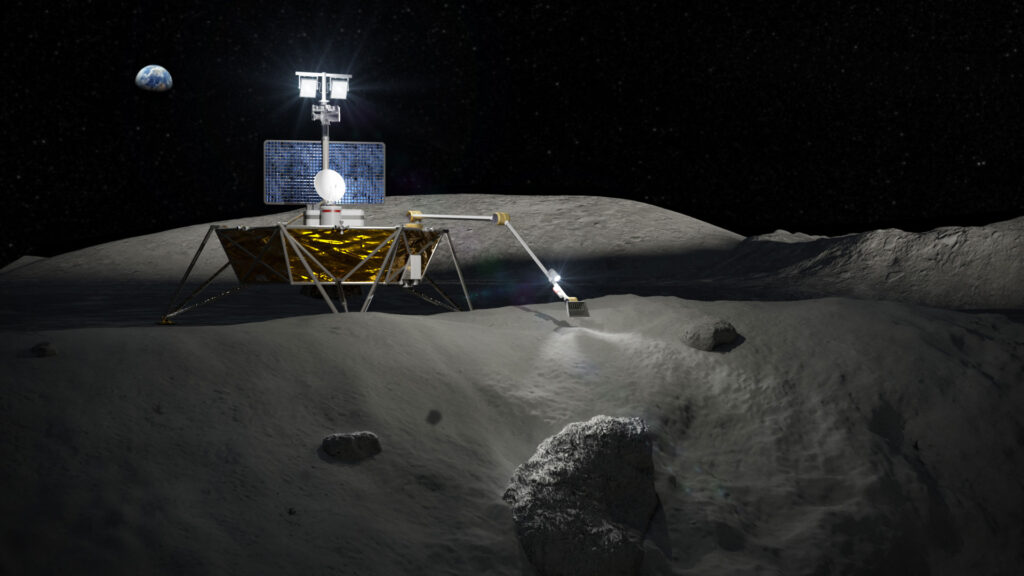
Tyto činnosti zahrnují například nabírání vzorků lopatkou, nebo analyzování těchto vzorků, ale i vykládání vědeckých experimentů či pořizování fotografií okolí místa přistání landeru. Současné návrhy robotických paží pro lunární landery vyžadují ohřívače, které mají zabránit námaze a poškození převodů v paži při jejich vystavení extrémně nízkým teplotám během lunární noci. Projekt COLDArm ale jde na celou věc jinak. Inženýři do návrhu zapracovali speciální převody a kontroléry motorů, které mohou pracovat i v extrémních tepelných podmínkách aniž by potřebovaly zdroj tepla. Díky tomu pak bude možné uspořit cennou energii i neméně cennou hmotnost celé mise.
Podobně jako robotické paže na sondách Phoenix a InSight disponuje COLDArm čtyřmi stupni volnosti a dosahuje délky zhruba dva metry, přičemž vyvine sílu zhruba 45 Newtonů. Speciální senzor zabudovaný v blízkosti „zápěstí“ manipulátoru měří a reguluje úroveň síly, kterou paže vyvine při každém pohybu. Manipulátor by měl být vybaven kamerami pro 3D snímkování, focení povrchu a obecnou činnost. Tým zodpovědný za projekt COLDArm v současné době vyhodnocuje možnosti připojení různých malých přístrojů, které by jejich manipulátor mohl potenciálně držet na konci paže a používat. Návrhy obsahují například i 3D tištěnou lopatku z titanu s prvky, které by mohly pomoci získat geotechnologické informace o vlastnostech lunárního regolitu.

Zdroj: https://www.nasa.gov/
Jelikož má být avionika manipulátoru COLDArm nezávislá na avionice samotného landeru, může být případně naprogramována, aby autonomně řídila klouby paže k provádění různých pohybů a pořizování fotek či snímání dat. Díky budoucímu vývoji softwaru by avionika projektu COLDArm mohla umožnit autonomní provoz i na tzv. oceánských světech jako je třeba Jupiterův měsíc Europa.
Návrh manipulátoru COLDArm je opravdu promyšlený. Inženýři do něj zapracovali také držák nářadí a dokonce i nabíječku pro některé nástavce! To umožní snadnou výměnu nástrojů a vybavení, které může COLDArm během mise používat. Zmíněná nabíječka má poskytnout robustní a prachu odolné mechanické rozhraní včetně připojení elektřiny a dat až pro čtyři nástroje. Další nástroje pak mohou být uloženy ve zmíněném držáku, který bude vybaven standardním zámkovým rozhraním.
Ozubená kola v převodech manipulátoru COLDArm se vyvíjí v rámci projektu Bulk Metallic Glass Gear a o kontroléry motoru se postarala společnost Motiv. V současné době je manipulátor COLDarm zvažován pro lunární demonstraci technologie. V takovém případě by se mohl testovací exemplář vypravit na Měsíc na palubě komerčního landeru. Úspěšné prokázání funkčnosti této technologie by umožnilo její budoucí nasazení na misích k Měsíci i k oceánským světům. Projekt COLDArm je financován iniciativou LSII (Lunar Surface Innovation Initiative) pod hlavičkou programu pro vývoj klíčových technologií GCD (Game Changing Development).
Přeloženo z:
https://www.nasa.gov/
Zdroje obrázků:
http://www.nasa.gov/…/extreme_environment_2_-_coldarm_bmgg.jpg
http://www.nasa.gov/…/image/bmgg_thumbnail_ready_for_staging_0.jpg






{kind=link}
{kind=link}